Изобретение может быть использовано в авиационной технике для доставки боевой нагрузки с повышенной точностью Екво=4... 7 м в широком спектре применения по высоте и скорости сброса бомбы, при реализации в бортовом комплексе режима целераспределения, что обеспечивает одновременную работу по нескольким подсвеченным лазерами целям.
Известен бортовой комплекс корректируемого летательного аппарата, стабилизированного по крену, с телевизионной головкой самонаведения (Заявка 93044583/11 от 16.04.93 г., патент РФ №2058011, Бюл. №10 от 10.04.96 г.).
В бортовом комплексе корректируемого летательного аппарата, стабилизированного по крену, с телевизионной головкой самонаведения соединения уже имеющихся в существующих корректируемых аппаратах и новых блоков реализуют следующие процедуры: запоминание в поле обработки текущего телевизионного сигнала как эталонного, выделение в этом поле обработки значимых контрастных ориентиров, выполнение корреляционной обработки текущего и эталонного телевизионных сигналов, формирование по результатам корреляционной обработки дискриминационной характеристики, определение с помощью этой характеристики углового смещения текущего телевизионного изображения цели относительно эталонного, формирование для трехосного гиростабилизатора, на котором установлена телевизионная камера, управляющих сигналов, возвращающих оптическую ось телевизионной камеры на центр выбранной оператором цели, определение величины разномасштабирования между текущим телевизионным изображением и эталонным, перезапись (при превышении величины разномасштабирования заданного порогового значения) текущего телевизионного изображения цели в качестве нового эталона. Бортовой комплекс повышает эффективность корректируемых летательных аппаратов, расширяет зоны и условия сброса этих аппаратов, повышает точность самонаведения летательных аппаратов на малоконтрастные и неконтрастные цели, повышает помехоустойчивость летательного аппарата к организованным помехам.
Однако в данном бортовом комплексе не реализуется режим целераспределения, что не обеспечивает залповый сброс самонаводящихся авиабомб при одновременной работе самолета-носителя по нескольким целям.
Известны бортовые комплексы авиационного оружия класса “воздух-поверхность” США и западноевропейских стран с лазерными, телевизионными и тепловизионными головками (Новости зарубежной науки и техники. Системы авиационного вооружения №1, 1987 г., стр. 1-24).
Бортовые комплексы указанного авиационного оружия включают приемник “излучение-сигнал”, оптическую систему, электронно-вычислительное устройство и рулевые органы управления авиационным оружием.
Все эти бортовые комплексы управления обладают тем недостатком, что в них не реализован режим целераспределения, что не позволяет обеспечить одновременную работу самолета-носителя по нескольким целям.
Наиболее известны за рубежом системы управления для авиационных бомб, выполненных по схеме “утка”, с лазерной головкой самонаведения с флюгерным приемником “излучение-сигнал” (серии лазерных авиабомб PAVEWAY I и PAVEWAY II).
В серию лазерных авиабомб типа PAVEWAY I входят авиабомбы GBU 10/В, GBU 10 A/B, GBU 11 А/В, GBU 12 А/В.
В серию лазерных авиабомб PAVEWAY II входят GBU 10 Е/В, GBU 10 F/B, GBU 12 D/B, GBU 12 E/B, GBU 16 В/В, GBU 16 С/В.
Указанные авиабомбы отличаются своим калибром (диаметром), типом боевой нагрузки, наличием или отсутствием выдвижных стабилизирующих перьев.
Все вышеперечисленные авиабомбы выполнены по аэродинамической схеме “утка”, снабжены флюгерным приемником лазерного излучения и обладают идентичным по структуре и составу бортовым комплексом управления (см. В.Дмитриев. Новые управляемые авиационные бомбы. Зарубежное военное обозрение, 1985, №7, стр.42).
Бортовые комплексы управления лазерных авиабомб PAVEWAY I и PAVEWAY II выполнены практически полностью идентичными и содержат последовательно соединенные преобразователь “излучение-сигнал” с оптической системой, обнаружитель сигнала, электронно-вычислительное устройство, формирующие управляющие сигналы на рулевые органы аэродинамическими рулями, выполненными по схеме “утка”.
В бортовом комплексе управления американских лазерных авиабомб, выполненных по схеме “утка”, не реализована система целераспределения, то-есть при наличии в поле зрения фотоприемника лазерного излучения одновременно нескольких отраженных различными целями сигналов бортовой комплекс не может среди них определить “свою” цель и, таким образом, становится невозможной одновременная работа одного или нескольких самолетов в одном месте по нескольким целям, что существенно сужает возможности применения лазерного оружия. Это весьма существенный недостаток подобных бортовых комплексов управления.
Наиболее близким к предлагаемому в изобретении бортовому комплексу для управления авиационной бомбы, выполненной по схеме “утка” с лазерной головкой самонаведения, является бортовой комплекс авиабомбы PAVEWAY I. (см. В.Дмитриев. Новые управляемые авиационные бомбы. Зарубежное военное обозрение, 1985, №7, стр.42).
В бортовом комплексе управления авиабомб PAVEWAY I в качестве приемника отраженного лазерного излучения применяется фотоприемник, разделенный на четыре квадранта.
Сигналы с данных квадрантов поступают через пороговые устройства, отсекающие внутренние шумы фотоприемника, на импульсные усилители, а затем на аналоговые усилители.
Сигналы с противоположных квадрантов затем сравниваются в схеме вычитания, где формируется сигнал ошибки. Сигнал ошибки далее поступает на рулевой привод, управляющий аэродинамическими рулями, выполненными по схеме “утка”, своего канала.
Аэродинамические рули при этом на лазерной авиабомбе расположены спереди по схеме “X”.
Сигналы ошибки, формируемые противоположно расположенными квадрантами, отрабатываются своей парой аэродинамических рулей так, чтобы центр квадрантов стабилизированного по вектору скорости флюгерного фотоприемника в процессе управления бомбой совпал с принятым отраженным от цели лазерным сигналом.
Так как отражающие свойства цели, прозрачность атмосферы изменяются достаточно широко, кроме того в процессе самонаведения лазерной авиабомбы изменяется дальность до цели, амплитуда принятого фотоприемником отраженного сигнала меняется в весьма широких пределах.
Для стабилизации уровня принятого сигнала в бортовом комплексе-прототипе реализована автоматическая регулировка усиления. Для этого с выхода пороговых устройств всех каналов сигналы подаются в сумматор, выход которого управляет элементом с регулировочной характеристикой, который, в свою очередь, изменяет коэффициент усиления импульсных усилителей всех каналов.
Ожидаемый технический результат состоит в создании такого бортового комплекса для управления авиабомбой (выполненной по схеме "утка" с лазерной флюгерной ГСН), который обеспечивает режим целераспределения, позволяющий в районе целей организовать одновременную работу нескольких лазерных авиабомб по различным целям.
Для решения этой задачи в бортовой комплекс управления, содержащий последовательно включенные квадранты фотоприемника лазерного излучения, пороговые устройства, импульсные и аналоговые усилители, сумматор и элемент с регулировочной характеристикой, разностные схемы и рулевые привода аэродинамических рулей, выполненных по схеме “утка” на выходе аналоговых усилителей, введены амплитудный сумматор, пять пиковых детекторов, аналоговый вычислитель, аналоговый коммутатор, усилитель, аналогово-цифровой преобразователь (АЦП), сравнивающее устройство, три цифроаналоговых преобразователя (ЦАП), спецвычислитель, построенный на программируемой логической интегральной схеме (ПЛИС), причем четыре выхода обнаружителя подключены к четырем входам аналогового сумматора и к входам первого, второго, третьего и четвертого пиковых детекторов соответственно, а выход аналогового сумматора связан с входами аналогового вычислителя, пятого пикового детектора и первым входом суммирующего устройства, первый выход аналогового вычислителя соединен с шестым входом аналогового коммутатора, второй выход аналогового вычислителя соединен с седьмым входом аналогового коммутатора, выходы первого, второго, третьего, четвертого и пятого пиковых детекторов подключены к первому, второму, третьему, четвертому и пятому входам аналогового коммутатора соответственно, выход аналогового коммутатора через усилитель и АЦП соединен с первым входом спецвычислителя, первый выход спецвычислителя подключен ко второму входу усилителя, второй вход спецвычислителя связан с выходом сравнивающего устройства, второй вход которого через первый ЦАП соединен со вторым выходом спецвычислителя, на третий вход которого подаются исходные данные о цели, третий и четвертый выходы спецвычислителя через второй и третий ЦАП соответственно подключены к входам рулевых приводов аэродинамических рулей, выполненных по схеме “утка”.
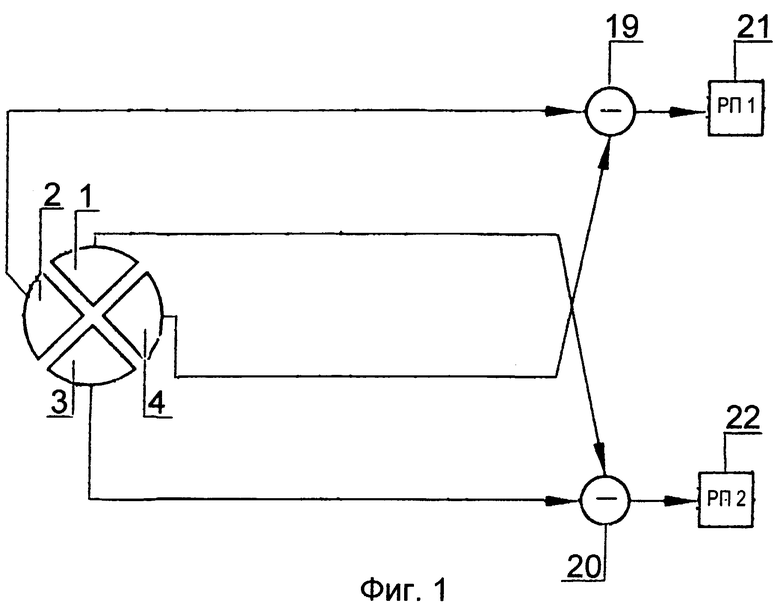
На фиг.1 приведены функциональная схема бортового комплекса управления корректируемой авиационной бомбы, выполненной по схеме “утка”, с лазерной флюгерной головкой самонаведения, выбранной в качестве прототипа, и функциональная схема предлагаемого в изобретении комплекса управления корректируемой авиационной бомбы.
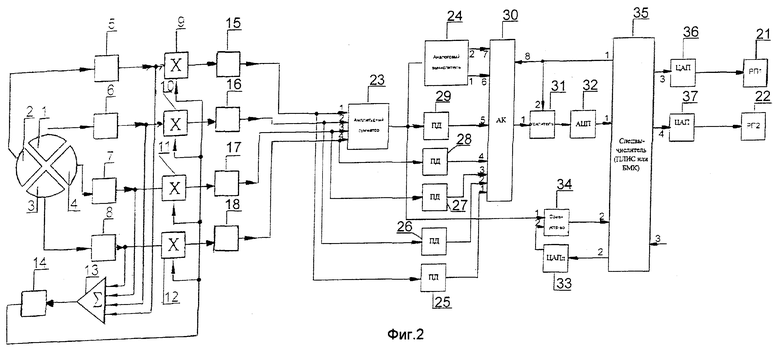
На фиг.2 приведена функциональная схема предлагаемого в изобретении комплекса управления корректируемой авиационной бомбы, выполненной по схеме “утка”, с лазерной флюгерной головкой самонаведения и обеспечивающего режим целераспределения при работе несколькими лазерными бомбами по разнесенным целям.
Бортовой комплекс-прототип содержит (фиг.1):
- четыре квадрантных фотоприемника (1, 2, 3, 4) отраженного целью лазерного излучения;
- два устройства вычитания сигналов (19, 20);
- рулевой привод аэродинамических рулей, выполненных по схеме “утка”, (21), (22).
Бортовой комплекс-прототип (фиг.1) работает следующим образом.
Самолет-носитель авиабомбы входит в район цели. С помощью самолетного прицельно-навигационного комплекса (ПРНК) летчик обнаруживает цель, накладывает на цель прицельное перекрестие. ПРНК переводится в режим автосопровождения выбранной цели. Лазерный дальномер-подсветчик самолета-носителя начинает подсвечивать выбранную цель.
Вычислитель ПРНК определяет точку сброса авиационной бомбы с лазерной флюгерной головкой самонаведения.
Летчик снимает с помощью боевой кнопки все предохранители для осуществления сброса авиабомбы.
Команду на сброс авиабомбы вырабатывает вычислитель ПРНК.
Этот момент соответствует точке сброса, при которой фотоприемник бортового комплекса (квадранты 1, 2, 3, 4) на траектории автономного полета авиабомбы с наибольшей вероятностью на максимальной дальности от цели захватит отраженный лазерный сигнал.
Для этого за объективом флюгерной лазерной головки самонаведения (ЛГСН) в плоскости изображения размещены четыре идентичных фоточувствительных элемента (1, 2, 3, 4). Отраженное от цели лазерное пятно попадает либо на все квадранты фотоприемника, либо только на часть из них.
Авиационные бомбы, выполненные по схеме “утка”, с лазерной флюгерной ГСН, не стабилизируются по крену во время автономного полета к цели.
Поэтому сигналы управления на аэродинамические рули, выполненные по схеме “утка”, формируются с учетом отсутствия стабилизации авиабомбы по крену.
При этом сигналы ошибки по каналам управления формируются как разность напряжений, поступающих с противоположных площадок фотоприемника (1 и 3; 2 и 4, см. фиг.1).
Сигнал ошибки, формируемый разностной схемой 20, поступает на рулевой привод РП2(22), управляющий одной парой аэродинамических рулей, выполненных по аэродинамической схеме “утка”. (Рули расположены на авиабомбе спереди бомбы по схеме “X”).
При этом в процессе полета бомбы отраженный от цели лазерный сигнал в процессе ликвидации сигнала ошибки переводится в центр фотоприемных квадрантов.
Аналогично формируется сигнал ошибки для рулевого привода РП1 (21, фиг.1), управляющего второй парой аэродинамических рулей.
При этом сигнал с квадранта 2 поступает на вход разностной схемы 19.
На второй вход разностной схемы 19 поступает с квадранта 4.
Сигнал ошибки с выхода разностной схемы 19 поступает на рулевой привод РП1 (21), управляющий второй парой аэродинамических рулей, выполненных по аэродинамической схеме “утка”.
Отрабатывая сигнал рассогласования, авиабомба “приводит” принятый, отраженный от цели, лазерный сигнал в центр квадрантов, что обеспечивает попадание бомбы в цель.
Подобный принцип управления корректируемой авиационной бомбы с лазерной флюгерной ГСН, не стабилизируемой по крену, достаточно устойчив и обеспечивает требуемую точность наведения на подсвеченную лазерным излучателем цель.
Однако бортовой комплекс-прототип, выполненный в соответствии с фиг.1, не в состоянии обеспечить систему целераспределения, то есть при наличии в поле зрения фотоприемника одновременно нескольких отраженных от различных целей сигналов определить “свою” цель, что делает невозможной одновременную работу одного или нескольких самолетов-носителей в одном месте по нескольким разнесенным целям.
Это существенно сужает возможность применения корректируемых авиационных бомб, выполненных по схеме “утка”, с лазерной флюгерной ГСН.
Предлагаемый бортовой комплекс управления авиационной бомбы, выполненной по схеме “утка”, с лазерной флюгерной ГСН представлен на фиг.2.
Он содержит четыре квадрантных фотоприемника (1, 2, 3, 4) отраженного целью лазерного излучения, четыре пороговых устройства обнаружителя (5, 6, 7, 8), четыре импульсных усилителя (9,10,11,12), четыре усилителя сигналов (15,16,17,18), сумматор выходных сигналов с квадрантов фотоприемника (13), элемент с регулировочной характеристикой для организации автоматического регулирования усиления (14).
На выходе усилителей 15, 16, 17, 18 введены амплитудный сумматор 23, пять пиковых детекторов (ПД) (25, 26, 27, 28, 29), аналоговый вычислитель (24), аналоговый коммутатор (АК) (30), усилитель (31), АЦП (32), сравнивающее устройство (34), три цифроаналоговых преобразователя (33, 36, 37), спецвычислитель, построенный на ПЛИС (35) (БМК-бортовой микрокомпьютер), причем выходы усилителей (15, 16, 17, 18) подключены соответственно к четырем входам амплитудного сумматора 23 и к входам первого, второго, третьего и четвертого пиковых детекторов 25, 26, 27, 28 соответственно, а выход амплитудного сумматора подключен ко входам аналогового вычислителя 24, пикового детектора 29 и к первому входу сравнивающего устройства, первый выход аналогового вычислителя соединен с шестым входом аналогового коммутатора, второй выход аналогового вычислителя соединен с седьмым входом аналогового коммутатора, выходы пиковых детекторов 25, 26, 27, 28, 29 подключены к первому, второму, третьему, четвертому и пятому входам аналогового коммутатора 30 соответственно, выход аналогового коммутатора 30 через усилитель 31 и АЦП 32 соединен с первым входом спецвычислителя 35, первый выход спецвычислителя 35 подключен ко второму входу усилителя (31), второй вход спецвычислителя 35 связан с выходом сравнивающего устройства 34, второй вход которого через ЦАП 33 соединен со вторым выходом спецвычислителя 35, на третий вход которого подаются исходные данные о цели (код “m”), третий и четвертый выходы спецвычислителя 35 через ЦАП 36 и ЦАП 37 соответственно подключены к входам рулевых приводов РП1 и РП2, управляющих аэродинамическими рулями, выполненными по схеме “утка”.
Процесс прицеливания и сброса корректируемой авиационной бомбы, выполненной по схеме “утка”, с лазерной флюгерной ГСН, прием отраженного целью лазерного сигнала, полностью соответствует работе бортового комплекса управления - прототипа.
Эффективность работы предлагаемого бортового комплекса усиливается тем, что пороговые устройства 5, 6, 7, 8 отрезают внутренние шумы фотоприемных устройств (1, 2, 3, 4).
Для усиления сигналы с выхода пороговых устройств 5, 6, 7, 8 поступают через импульсные усилители 9, 10, 11, 12, включенные в цепь автоматической регулировки усиления, на усилительные каскады 15, 16, 17, 18.
Мощность отраженных сигналов, попадающих на квадранты 1, 2, 3, 4 фотоприемника, может меняться в широких пределах в зависимости от дальности, прозрачности атмосферы, отражающих свойств цели.
Эта мощность меняется и в процессе сокращения дистанции до цели при наведении авиабомбы на цель.
Для предохранения элементов усилительного тракта от насыщения в предлагаемом бортовом комплексе управления применен каскад автоматического регулирования усиления (13, 14, 9, 10, 11, 12).
Сигнал на входе в элемент 14 не должен зависить от рассогласования, поэтому он суммируется со всех квадрантов 1, 2, 3, 4 в сумматоре 13 и поступает на элемент 14, обладающий регулировочной характеристикой.
Выход элемента 14 управляет усилением каскадов 9, 10, 11, 12.
При этом дополнительно введенная в бортовой комплекс аппаратура 23... 37 для обеспечения целераспределения работает следующим образом.
Электрические сигналы в виде коротких импульсов напряжения, следующие с большой скважностью с выхода усилителей 15, 16, 17, 18 по четырем каналам, поступают на вход амплитудного сумматора 23. Амплитудный сумматор 23 вычисляет сумму величин u1 ...u4 (напряжения на выходах усилителей 15, 16, 17, 18). Полученный суммарный сигнал  подается на аналоговый вычислитель 24, определяющий характеристики uΣ и
подается на аналоговый вычислитель 24, определяющий характеристики uΣ и  . Полученное среднее значение (uΣ ) и среднее по модулю отклонение (
. Полученное среднее значение (uΣ ) и среднее по модулю отклонение ( ) оцифровываются и вводятся через входы 7 и 6 в спецвычислитель 35, который производит вычисление порога. Спецвычислитель 35 вычисляет порог:
) оцифровываются и вводятся через входы 7 и 6 в спецвычислитель 35, который производит вычисление порога. Спецвычислитель 35 вычисляет порог:
Порог= .
.
Код порога выдается через 2 выход спецвычислителя 35 на ЦАП 33, что позволяет сравнивающему устройству 34 фиксировать превышение порога суммарным с выхода амплитудного сумматора 23 и таким образом проводить селекцию импульсов по амплитуде.
Кроме того, сигналы с выхода усилителей 15, 16, 17, 18 (по четырем каналам) и сигнал с выхода амплитудного сумматора 23, через пиковые детекторы 25, 26, 27, 28 поступают на вход аналогового коммутатора 30, где запоминаются и по командам со спецвычислителя 35 через усилитель 31 и АЦП 35 поступают на вход спецвычислителя 35. Спецвычислитель 35 из всех поступивших импульсов с выхода амплитудного сумматора 23 выбирает импульсы, которые приняты в соответствии с кодовой последовательностью, записанной в памяти спецвычислителя 35 через вход 3 (код “m”). Кодовая последовательность необходима для того, чтобы обеспечить режим целераспределения.
Кодирование последовательности зондирующих импульсов должно обеспечивать:
а) чтобы закон изменения интервала между следующими друг за другом импульсами ни в одной последовательности не повторялся;
в) чтобы по двум интервалам (три принятых импульса) при условии введения в спецвычислитель 35 закона кодирования и числовых значений четырех параметров из заданного закона кодирования можно было определить номер последовательности и по номеру последовательности и величине последнего интервала вычислить момент прихода следующего импульса.
Приведенным выше требованиям удовлетворяет закон кодирования, описанный выражением:
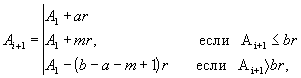
где: Ai - текущее значение числовой последовательности закона кодирования;
Ai+1 - вычисляемое значение числовой последовательности кодирования;
а - начальный параметр последовательности;
b - конечный параметр последовательности;
m - номер последовательности;
r - период тактовой частоты.
Величины числовых значений четырех параметров (а, b, m, r) задаются на вход 3 спецвычислителя 35 и станцию подсвета одновременно при получении вводных данных перед выполнением поставленной задачи.
Возможность менять числовые значения параметров в законе кодирования непосредственно перед выполнением задания значительно усложняет противнику постановку активных помех, так как в этом случае ему за время атаки, время которой, как правило, не превышает одной минуты, необходимо решить уравнение с четырьмя неизвестными, что является задачей, практически неразрешимой.
Введение в предлагаемый бортовой комплекс управления элементов 5... 37 отличает предлагаемый бортовой комплекс управления от рассмотренного прототипа, так как предлагаемый бортовой комплекс управления позволяет реализовать в авиабомбе режим целераспределения, что дает возможность организовать одновременную работу самолетам-носителям по нескольким целям.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ | 2003 |
|
RU2232973C1 |
| САМОНАВОДЯЩАЯСЯ АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ | 2003 |
|
RU2247314C1 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ЛАЗЕРНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2002 |
|
RU2228510C1 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2006 |
|
RU2339905C2 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2006 |
|
RU2339904C2 |
| ВЫСОКОТОЧНАЯ АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, КРУГЛОСУТОЧНОГО И ВСЕПОГОДНОГО БОЕВОГО ПРИМЕНЕНИЯ С АППАРАТУРОЙ ИНЕРЦИАЛЬНО-СПУТНИКОВОГО НАВЕДЕНИЯ | 2007 |
|
RU2346232C1 |
| САМОНАВОДЯЩАЯСЯ АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ЛАЗЕРНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2005 |
|
RU2300075C1 |
| ВЫСОКОТОЧНАЯ САМОНАВОДЯЩАЯСЯ АВИАЦИОННАЯ БОМБА БОЛЬШОЙ МОЩНОСТИ С ТЕЛЕВИЗИОННОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2004 |
|
RU2263875C1 |
| САМОНАВОДЯЩАЯСЯ АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ | 2002 |
|
RU2204796C1 |
| САМОНАВОДЯЩАЯСЯ АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ | 2002 |
|
RU2204795C1 |
Изобретение относится к авиационной технике. Технический результат - возможность наведения нескольких лазерных авиабомб по различным целям. Бортовой комплекс управления корректируемой авиационной бомбы, выполненной по схеме “утка”, обеспечивает самонаведение авиабомбы, не стабилизированной по крену, с помощью пассивной лазерной головки самонаведения с флюгерной стабилизацией. В качестве приемников отраженного целью лазерного сигнала в бортовом комплексе применен четырехквадрантный фотоприемник. Сигналы с каждого квадранта через пороговые схемы, отрезающие шумы фотоприемника, импульсные усилители, аналоговые усилители попадают на вход электронных устройств, обеспечивающих режим целераспределения всех авиационных бомб с пассивными головками самонаведения, применяемых одновременно при атаке различных целей несколькими самолетами-носителями. Это реализуется с помощью задания специального кода и введения в бортовой комплекс амплитудного сумматора, пяти пиковых детекторов, аналогового вычислителя, аналогового коммутатора, усилителя, аналогово-цифрового преобразователя, сравнивающего устройства, трех цифроаналоговых преобразователей, спецвычислителя. Реализация в бортовом комплексе режима целераспределения существенно повышает эффективность комплекса, так как обеспечивает боевую работу одного или нескольких самолетов-носителей по различным разнесенным целям. 2 ил.
Бортовой комплекс управления корректируемой авиационной бомбы, выполненной по схеме “утка”, с лазерной флюгерной головкой самонаведения, содержащий четыре квадранта фотоприемников лазерного отраженного излучения, два рулевых привода, каждый из которых предназначен для управления двумя аэродинамическими рулями, выполненными по схеме “утка”, отличающийся тем, что он снабжен четырьмя пороговыми детекторами, четырьмя импульсными усилителями, четырьмя аналоговыми усилителями, сумматором, выходом соединенным с элементом с регулировочной характеристикой, изменяющей в зависимости от изменения дальности, прозрачности атмосферы, отражающих свойств цели коэффициент усиления импульсных усилителей, амплитудным сумматором, пятью пиковыми детекторами, аналоговым вычислителем, аналоговым коммутатором, усилителем, аналого-цифровым преобразователем, сравнивающим устройством, тремя цифроаналоговыми преобразователями, спецвычислителем, причем каждый квадрант через пороговый детектор и импульсный усилитель соединен с аналоговым усилителем, выходы всех пороговых детекторов соединены со входами сумматора, четыре выхода аналоговых усилителей подключены к четырем входам амплитудного сумматора и к входам первого, второго, третьего и четвертого пиковых детекторов соответственно, а выход амплитудного сумматора связан с входами аналогового вычислителя, пятого пикового детектора и первым входом сравнивающего устройства, первый выход аналогового вычислителя соединен с шестым входом аналогового коммутатора, второй выход аналогового вычислителя соединен с седьмым входом аналогового коммутатора, выход первого, второго, третьего, четвертого и пятого пиковых детекторов подключены к первому, второму, третьему, четвертому и пятому входам аналогового коммутатора соответственно, выход аналогового коммутатора через усилитель и аналого-цифровой преобразователь соединен с первым входом спецвычислителя, первый выход спецвычислителя подключен ко второму входу усилителя и восьмому входу аналогового коммутатора, второй вход спецвычислителя связан с выходом сравнивающего устройства, второй вход которого через цифроаналоговый преобразователь соединен со вторым выходом спецвычислителя, на третий вход которого подаются исходные данные о цели, третий и четвертый выходы спецвычислителя через цифроаналоговый преобразователь соответственно подключены к входам рулевых приводов аэродинамических рулей, выполненных по схеме “утка”.
| ДМИТРИЕВ В., Новые управляемые авиационные бомбы, Зарубежное военное обозрение, 1985, №7, с.42 | |||
| Стыковочное устройство трелевочно-транспортного средства | 1988 |
|
SU1564010A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ИЗДЕЛИЯ ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ МЕТОДОМ НАМОТКИ | 2006 |
|
RU2322350C2 |
| RU 2058011 С1, 10.04.1996. | |||

