Изобретение относится к измерительной технике в части создания устройств для контроля оборотов вращающихся узлов счетчиков воды в режиме выбега с заданной начальной скоростью и может быть использовано в технологическом процессе производства счетчиков воды, имеющих два вращающихся узла, расположенных в независимых закрытых корпусах. В одном корпусе в подшипниках на оси размещена крыльчатка, предназначенная для установки в поток воды, в другом корпусе в подшипниках на оси установлен индикаторный прибор, при этом совместное вращение узлов обеспечивают два обращенных друг к другу постоянных магнита, каждый из которых размещен на оси в корпусе соответствующего узла.
Конечными этапами процесса производства счетчиков являются проверка их работоспособности, отбраковка и определение метрологического класса данного счетчика воды.
Под метрологическим классом понимается обобщенная характеристика счетчика воды, определяющая возможный диапазон изменения расхода при нормированном допуске на погрешность измерения прошедшего через счетчик объема воды. Для счетчиков воды существуют классы А, В, С и для горячей воды возможен класс Д.
Отнесение счетчика воды к тому или иному метрологическому классу происходит по результатам испытаний для целей утверждения типа и контролируется при первичной поверке. При этом счетчики устанавливают на поверочной установке с нормированными параметрами трубопровода и объема, проходящей через счетчик воды. Вскрытые недостатки готового счетчика приводят к необходимости практически заново начинать процесс производства счетчика: рассоединять узлы, подбирать пары узлов (для достижения парой узлов параметров метрологического класса), подчас повторять сборку с самого начала для отдельных узлов. При этом, учитывая все возрастающую социальную потребность в счетчиках воды, при описанной поверке тратится большое количество воды, электроэнергии, времени на переналадку счетчиков. Введение контроля параметров вращающихся узлов до сборки счетчиков без использования проточной воды является прогрессивным этапом в процессе производства счетчиков воды, тем более что упомянутые метрологические классы соотносятся известным образом как с расходом воды, так и с частотой вращения узлов счетчика воды.
Известно устройство для контроля параметров вращающихся узлов, которое может быть использовано для счетчиков воды с крыльчаткой, магнитно связанной с индикаторным прибором, содержащее корпус привода вращения с посадочным гнездом с фиксированной установкой контролируемого узла, в корпусе размещены статорные обмотки электродвигателя привода вращения и вибродатчики, устройство также содержит источник питания, блок подключения статорных обмоток, при этом ротор электродвигателя привода вращения установлен на валу контролируемого узла [1].
Устройство по сигналам вибродатчиков позволяет контролировать техническое состояние подшипников вращающегося узла без его разборки, что уменьшает время контроля узла и трудоемкость.
Недостатком устройства является то, что оно не обеспечивает контроль оборотов вращающихся узлов счетчиков воды в режиме выбега с заданной начальной скоростью, что исключает возможность соотнесения узла счетчика воды с определенным указанным выше метрологическим классом.
Также известно устройство для контроля оборотов вращающихся узлов, например, счетчиков воды с крыльчаткой, магнитно связанной с индикаторным прибором, в режиме выбега с заданной начальной скоростью, являющееся по числу общих признаков наиболее близким к описываемому, содержащее корпус привода вращения с посадочным цилиндрическим гнездом дискообразной формы, выступающим из тела корпуса, предназначенным для фиксированной установки контролируемого узла, в корпусе размещены ротор и статорные обмотки электродвигателя привода вращения и датчики положения ротора электродвигателя, устройство также содержит источник питания, блок коммутации статорных обмоток, механический блок включения привода вращения и его отключения при достижении заданной скорости вращения, а также индикатор оборотов контролируемого узла [2].
Данное устройство по сравнению с [1] обеспечивает контроль оборотов вращающихся узлов в режиме выбега с заданной начальной скоростью.
Однако из-за использования механического блока включения привода вращения и его отключения при достижении заданной скорости вращения, воздействие на который осуществляет оператор, проводящий контроль, устройство обладает низкими точностными параметрами контроля из-за влияния субъективного действия оператора, что исключает возможность соотнести контролируемый узел с определенным метрологическим классом. Кроме того, устройство нетехнологично, так как требует разборки узлов для обеспечения их крепежа в устройстве и воздействия на них указанного механического блока.
Целью изобретения является улучшение технологичности устройства за счет обеспечения возможности установки в нем контролируемых узлов без их разборки с одновременным повышением точности контроля оборотов вращающихся узлов за счет обеспечения синхронизации момента установления заданной начальной скорости с началом выбега.
Поставленная цель достигается тем, что в устройстве для контроля оборотов вращающихся узлов счетчиков воды с крыльчаткой, магнитно связанной с индикаторным прибором, в режиме выбега с заданной начальной скоростью, содержащем корпус привода вращения с посадочным цилиндрическим гнездом для фиксированной установки контролируемого узла, в корпусе размещены статорные обмотки электродвигателя привода вращения и датчики положения ротора электродвигателя, устройство также содержит источник питания, блок коммутации статорных обмоток, блок включения привода вращения и его отключения при достижении заданной скорости вращения, а также индикатор оборотов контролируемого узла, согласно изобретению корпус выполнен из немагнитного материала, гнездо имеет форму стакана, который углублен своим дном в тело корпуса, и предназначено для размещения в нем части контролируемого узла с магнитом, полюса которого параллельны дну стакана, статорные обмотки выполнены в виде четырех электрических катушек вентильного двигателя и расположены в корпусе со стороны дна посадочного гнезда симметрично его вертикальной оси, датчики положения ротора выполнены в виде датчиков Холла и расположены на боковых поверхностях двух соседних статорных обмоток со стороны дна посадочного гнезда, блок включения привода вращения и его отключения при достижении заданной скорости вращения выполнен в виде микроконтроллера с возможностью подсчета оборотов вращающегося узла и определения его качества, при этом устройство дополнительно снабжено блоком управления коммутацией статорных обмоток, регулируемым блоком питания статорных обмоток и цифро-аналоговым преобразователем, при этом первый и второй датчики положения ротора связаны соответственно с первым и вторым входами блока управления коммутацией статорных обмоток, а первый и второй выходы этого блока соединены с первым и вторым входами микроконтроллера, третий вход которого связан с выходом индикатора оборотов контролируемого узла, первый и второй входы которого связаны соответственно с выходом микроконтроллера и с первым выходом источника питания, который одновременно связан с датчиками положения ротора, первым входом цифро-аналогового преобразователя, четвертым входом микроконтроллера, третьим входом блока управления коммутацией статорных обмоток и первым входом блока коммутации статорных обмоток, со второго по пятый входы которого связаны соответственно с третьим по шестой выходами блока управления коммутацией статорных обмоток, при этом с первого по четвертый выходы блока коммутации статорных обмоток соединены соответственно с первой по четвертую статорными обмотками, причем второй выход источника питания связан как с первым входом регулируемого блока питания статорных обмоток, так и со вторым входом цифро-аналогового преобразователя, а третий выход источника питания соединен как со вторым входом регулируемого блока питания статорных обмоток, так и с третьим входом цифро-аналогового преобразователя, четвертый вход которого связан с выходом микроконтроллера, а аналоговый выход цифро-аналогового преобразователя соединен с третьим входом регулируемого блока питания статорных обмоток, четвертый и пятый входы которого связаны соответственно с четвертым и пятым выходом источника питания, первый и второй входы которого предназначены для подключения питающей электросети, при этом с первого по третий выходы регулируемого блока питания статорных обмоток соединены соответственно с шестым по восьмой входами блока коммутации статорных обмоток. Суть изобретения состоит в том, что за счет выполнения привода вращения контролируемого узла в виде вентильного двигателя, ротором которого служит постоянный магнит каждого узла счетчика воды и в устройстве конструктивно созданы условия для легкодоступной, безразборной установки каждого узла в немагнитный корпус привода, технологичность устройства по сравнению с прототипом очевидно улучшена. При этом за счет использования вентильного двигателя, статорные обмотки которого коммутируются по сигналам датчиков ротора, в устройстве организовано (с помощью микроконтроллера, цифроаналогового преобразователя и указанных блоков, связанных с коммутацией) регулирование питания и управление коммутацией статорных обмоток привода так, что обеспечена возможность установления заданной начальной скорости выбега и синхронизация момента ее достижения с началом выбега, что существенно повышает, по сравнению с прототипом, точность контроля оборотов вращающихся узлов, позволяет соотнести их с метрологическим классом, при этом все параметры контроля выведены на индикатор.
На фиг.1 представлена блок-схема устройства для контроля оборотов вращающихся узлов счетчиков воды с крыльчаткой, магнитно связанной с индикаторным прибором, в режиме выбега с заданной начальной скоростью.
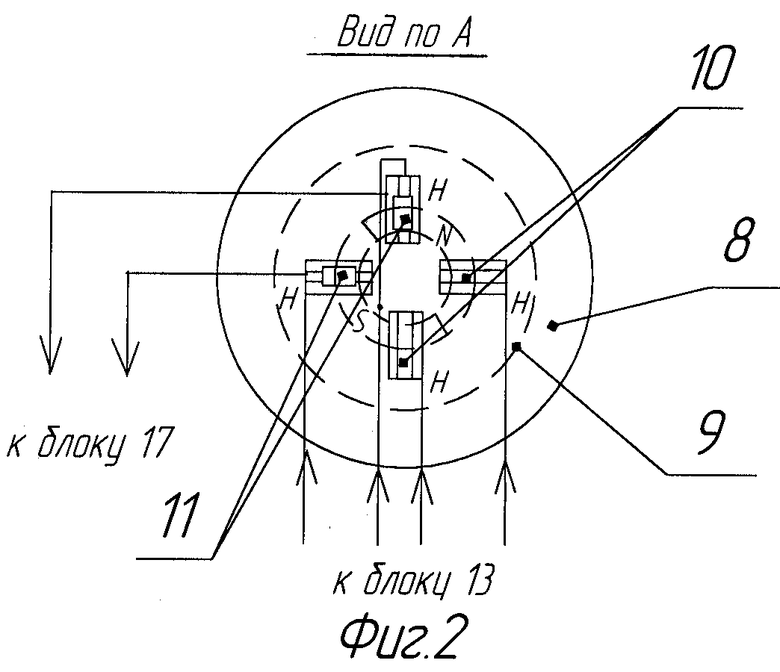
На фиг.2 показан вид по А на фиг.1.
Фиг.3-6 относятся к примеру реализации устройства.
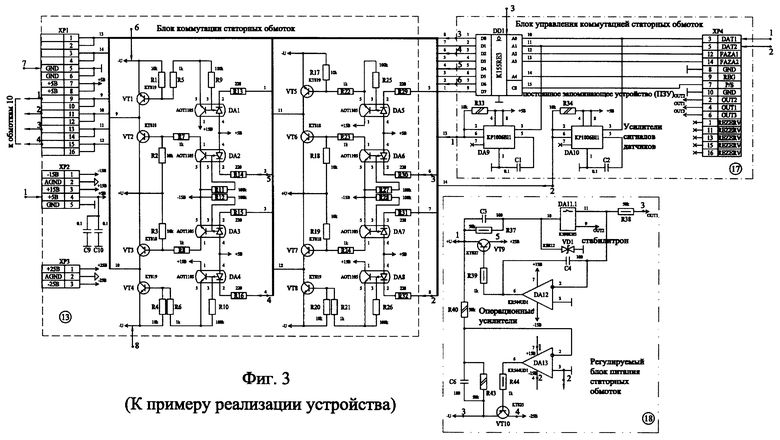
На фиг.3 показана принципиальная схема блока коммутации статорных обмоток, блока управления коммутацией статорных обмоток и регулируемого блока питания статорных обмоток.
На фиг.4 дана принципиальная электрическая схема индикатора оборотов контролируемого узла.
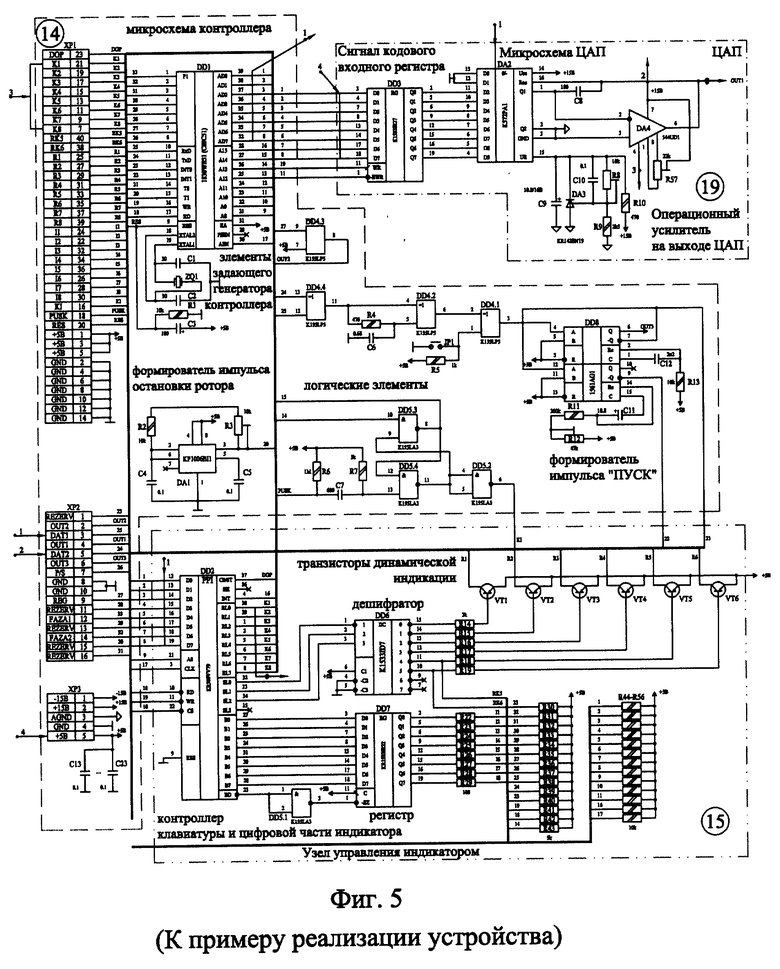
На фиг.5 показана принципиальная схема микроконтроллера и цифроаналогового преобразователя, а также узел управления индикатором на фиг.4.
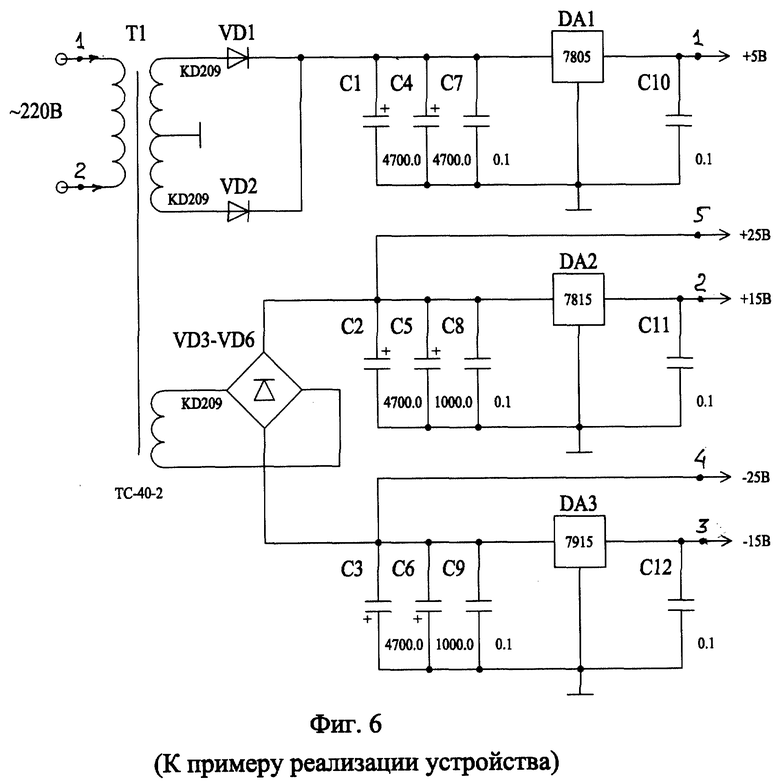
На фиг.6 дана принципиальная электрическая схема источника питания.
Устройство предназначено для контроля оборотов вращающихся узлов счетчиков воды. Счетчик содержит два вращающихся узла 1 и 2 (фиг.1). Каждый узел расположен в замкнутом по объему корпусе 3, в котором в подшипниках 4 на оси установлены в узле 1 - крыльчатка 5, а в узле 2 - индикаторный прибор 6. Также на одном из концов оси в каждом корпусе жестко установлен постоянный магнит 7. Магниты обеспечивают совместное вращение обоих узлов в рабочем состоянии счетчика воды.
Описываемое устройство содержит корпус 8 привода вращения (фиг.1 и фиг.2) с посадочным цилиндрическим гнездом 9 для фиксированной установки контролируемого узла 1 или 2. В корпусе размещены статорные обмотки 10 электродвигателя привода вращения и датчики 11 положения ротора электродвигателя. Устройство также содержит источник 12 питания, блок 13 коммутации статорных обмоток, блок 14 включения привода вращения и его отключения при достижении заданной скорости вращения, а также индикатор 15 оборотов контролируемого узла. Корпус 8 выполнен из немагнитного материала, например из дюраля или других сплавов алюминия. Гнездо 9 имеет форму стакана, который углублен своим дном 16 в тело корпуса 8, и предназначено для размещения в нем части контролируемого узла 1 или 2 с магнитом 7, полюса N-S которого параллельны дну 16 стакана. Статорные обмотки 10 выполнены в виде четырех электрических катушек вентильного двигателя и расположены в корпусе 8 со стороны дна 16 посадочного гнезда 9 симметрично его вертикальной оси. Датчики 11 положения ротора выполнены в виде датчиков Холла и расположены (например, приклеены или вставлены в паз корпуса статорных обмоток) боковых поверхностях двух соседних статорных обмоток 10 со стороны дна 16 посадочного гнезда. Блок 14 включения привода вращения и его отключения при достижении заданной скорости вращения выполнен в виде микроконтроллера (обозначен на фигурах позицией 14) с возможностью подсчета оборотов вращающегося узла и определения его качества. Устройство снабжено блоком 17 управления коммутацией статорных обмоток, регулируемым блоком 18 питания статорных обмоток и цифро-аналоговым преобразователем 19. При этом первый и второй датчики 11 положения ротора связаны соответственно с первым и вторым входами блока 17 управления коммутацией статорных обмоток, а первый и второй выходы этого блока 17 соединены с первым и вторым входами микроконтроллера 14, третий вход которого связан с выходом индикатора 15 оборотов контролируемого узла, первый и второй входы которого связаны соответственно с выходом микроконтроллера 14 и с первым выходом источника 12 питания, который одновременно связан с датчиками 11 положения ротора, с первым входом цифро-аналогового преобразователя 19, четвертым входом микроконтроллера 14, третьим входом блока 17 управления коммутацией статорных обмоток и первым входом блока 13 коммутации статорных обмоток, со второго по пятый входы которого связаны соответственно с третьим по шестой выходами блока 17 управления коммутацией статорных обмоток. При этом с первого по четвертый выходы блока 13 коммутации статорных обмоток соединены соответственно с первой по четвертую статорными обмотками 10. Второй выход источника 12 питания связан как с первым входом регулируемого блока 18 питания статорных обмоток, так и со вторым входом цифро-аналогового преобразователя 19. Третий выход источника 12 питания соединен как со вторым входом регулируемого блока 18 питания статорных обмоток, так и с третьим ходом цифро-аналогового преобразователя 19, четвертый (кодовый), вход которого связан с выходом микроконтроллера 14. Аналоговый выход цифро-аналогового преобразователя 19 соединен с третьим входом регулируемого блока 18 питания статорных обмоток, четвертый и пятый входы которого связаны соответственно с четвертым и пятым выходом источника 12 питания, первый и второй входы которого предназначены для подключения питающей электросети. С первого по третий выходы регулируемого блока 18 питания статорных обмоток соединены соответственно с шестым по восьмой входами блока 13 коммутации статорных обмоток.
Блок 13 коммутации статорных обмоток вентильного двигателя выполнен на электронных ключах в виде известной схемы переключения питания статорных обмоток по сигналам датчиков ротора (см., например, “Вентильные двигатели”; электронная книга по электромеханике, гл. 5.4, рис.5-116, - курс лекций С.-Петербургского Государственного Политехнического Университета. Адрес в Интернете: http://www.unilib.neva.ru/dl/059/CHAPTER5/Chapter5.html#ch_5_4). Из этого же источника известно управляющее устройство, преобразующее сигналы датчиков положения ротора на входе блока 13. Таким управляющим устройством в описываемой схеме является блок 17, выполненный на известной интегральной микросхеме постоянного запоминающего устройства, например типа КР155РЕЗ, КР556РТ5. Для обеспечения возможности задания частоты вращения ротора и ее стабилизации в устройство, как показано выше, введен регулируемый блок 18 питания статорных обмоток, который выполнен на двух операционных усилителях, например типа КР544УД1 или КР140УД7 с усилителями мощности.
Индикатор 15 оборотов контролируемого узла выполнен на цифровых индикаторах, например типа КИПЦ 22, интегральных микросхемах, например типа КР580ВГ79, КР1533ИР22, КР1533ИД7 и светодиодных индикаторах, например типа АЛ307, содержит также пусковую кнопку устройства, клавиатуру для набора вида узла: “проточная” часть (крыльчатка) или “счетная” часть (индикаторный прибор), частоты вращения, соответствующей моменту выбега, норм классификации узлов вращения по метрологическим классам А, В, С. Микроконтроллер 14 выполнен на известной интегральной микросхеме, например типа АТ89С51 или КР1830ВЕ51. Цифро-аналоговый преобразователь 19 выполнен на известных интегральных схемах, например типа КР572ПА1, КР1533ИР22 и КР544УД1. Источник 12 питания построен по обычной схеме преобразования сетевого напряжения с помощью многообмоточного трансформатора, например типа ТС-40-2 АФ0.470.025 ТУ, выпрямителей и микросхем (например, типа 7805, 7815, 7915) стабилизаторов напряжения. Источник 12 имеет выходы на +5В, ±15В и ±25В.
Устройство работает следующим образом.
Контролируемый узел 1 или 2, заключенный в замкнутом корпусе 3, устанавливается той его частью, которая содержит магнит 7, на дно 16 цилиндрического посадочного гнезда 9 корпуса 8 привода вращения, где узел фиксируется боковыми стенками гнезда, углубленного в тело корпуса 8. Полюса магнита 7 располагаются параллельно дну 16 стакана над статорными обмотками 10, являющимися катушками вентильного двигателя, при этом магнит 7 превращается в ротор вентильного двигателя привода вращения узла 1 или 2. Выполнение корпуса 8 привода вращения из немагнитного материала исключает момент торможения ротора данного вентильного двигателя в режиме выбега, когда статорные обмотки отключены. После установки контролируемого узла в корпусе привода источник 12 питания включается в сеть. Затем на индикаторе 15 с помощью его клавиатуры устанавливается заданная частота вращения ротора, с которой начнется выбег контролируемого узла, выбирается тип узла, соответствующий установленному (“счетная” или “проточная” часть) и дается сигнал “пуск” пусковой кнопкой индикатора 15. С этого момента устройство работает в автоматическом режиме. От датчиков 11 положения ротора, находящихся на соседних статорных обмотках со сдвигом под углом 90°, поступают сигналы на входы 1 и 2 блока 17 управления коммутацией статорных обмоток 10. Блок 17, выполненный на постоянных запоминающих устройствах, вырабатывает комбинацию управляющих сигналов и со своих выходов 3, 4, 5 и 6 подает сигналы на входы 2, 3, 4, 5 блока 13, управляя электронными ключами блока 13 коммутации статорных обмоток. Блок 13 подает со своих выходов 1, 2, 3, 4 напряжение в разнесенные пространственно статорные обмотки 10. При этом взаимодействие магнитных полей обмоток 10 и постоянного магнита 7 - ротора создает вращающий момент. При повороте магнита 7 на 90° сигнал от датчиков 11 на входах 1 и 2 блока 17 изменится так, что движение ротора - магнита 7 продолжится в ту же сторону. Одновременно с поступлением сигналов от датчиков на входы 1, 2 блока 17 через выходы 1, 2 этого блока эти сигналы поступают на входы 1, 2 микроконтроллера 14, который определит частоту вращения ротора и выработает кодовый сигнал с выхода на вход 4 цифро-аналогового преобразователя 19, выходное напряжение (аналоговый выход) которого поступает на вход 3 регулируемого блока 18 питания статорных обмоток. Изменение выходных сигналов (напряжений) блока 18 с выходов 1, 2, 3 воздействует через входы 6, 7, 8 блока 13 коммутации статорных обмоток так, что обороты ротора достигают заданного значения. При достижении ротором заданных оборотов сигнал на кодовом выходе микроконтроллера становится равным нулю, что приводит через регулируемый блок 18 к напряжению питания обмоток 10 также равным нулю. Это начальный момент режима выбега с заданной начальной скоростью. Ротор - магнит 7 продолжает вращаться по инерции. При этом за счет выполнения корпуса 8 привода из немагнитного материала на ротор в этом режиме не воздействует со стороны корпуса момент торможения, что исключает дополнительную погрешность при контроле. Микроконтроллер 14 по сигналам датчиков 11 положения ротора подсчитывает обороты ротора в режиме выбега. Как только ротор остановится, подсчитанное микроконтроллером 14 количество оборотов по цепи с выхода микроконтроллера на вход 1 индикатора 15 выводится на индикатор 15, при этом одновременно микроконтроллер определяет соответствие метрологическому классу контролируемого узла и выводит по той же цепи информацию об этом на индикатор 15.
Таким образом, за счет выполнения посадочного гнезда в форме стакана, углубленного своим дном в тело корпуса и организации в устройстве возможности создания вентильного двигателя в качестве приводного электродвигателя вращающегося узла: путем описанного размещения в корпусе привода статорных обмоток и датчиков положения ротора, выполнения корпуса из немагнитного материала, используя при этом магнит контролируемого узла в качестве ротора двигателя, в устройстве обеспечена возможность установки в нем контролируемых узлов счетчиков воды без их разборки, чем существенно улучшена технологичность устройства по сравнению с прототипом.
При этом одновременно за счет создания описанной схемы управления коммутацией статорных обмоток вентильного двигателя с использованием современной элементной базы обеспечена возможность установления заданной начальной скорости выбега контролируемого узла и синхронизации момента ее достижения с началом выбега, что существенно повышает точность контроля оборотов вращающихся узлов, исключает момент субъективности при определении начального момента выбега (что имеет место в прототипе), позволяет соотносить контролируемые узлы с определенными метрологическими классами, что в конечном итоге увеличивает количество выпускаемых качественных счетчиков воды, что имеет важное социальное значение.
Пример реализации устройства.
На фиг.3-6 показаны принципиальные электрические схемы соответствующих блоков устройства, использованные при его реализации. Устройство для контроля оборотов вращающихся узлов счетчиков воды содержит:
1) Корпус привода, разработки заявителя, материал - дюраль, диаметр 100 мм. В торцевой части корпуса выполнено цилиндрическое углубленное гнездо, диаметр 69 мм, высота боковой стенки 8 мм. В дне гнезда выполнены пазы, в которых установлены электрокатушки с числом витков 20, на двух соседних из которых со стороны дна гнезда наклеен датчик Холла.
2) Блок коммутации статорных обмоток (разработки заявителя), электронные ключи которого выполнены на транзисторах типа КТ818, КТ819 и оптронах типа АОТ110 по двухтактной схеме (см. фиг.3).
3) Блок управления коммутацией статорных обмоток, разработки заявителя, выполнен на интегральной микросхеме постоянного запоминающего устройства типа КР155РЕЗ (см. фиг.3).
4) Регулируемый блок питания статорных обмоток, разработки заявителя, выполнен на операционных усилителях типа КР544УД1 с усилителями мощности на транзисторах типа КТ825 и КТ827 (см. фиг.3).
5) Индикатор оборотов контролируемого узла, разработки заявителя, выполнен на цифровых индикаторах типа КИПЦ 22 (фиг.4), интегральных микросхемах типа КР580ВГ79, КР1533ИР22, КР1533ИД7 (фиг.5) и светодиодных индикаторах типа АЛ307А, содержит кнопку “пуск” и кнопочную клавиатуру (фиг.4) для набора вида узла, частоты вращения, соответствующей моменту выбега, норм классификации узлов вращения в соответствии с метрологическим классом (по частоте вращения) А, В, С.
6) Микроконтроллер, разработки заявителя, выполнена на базе интегральной микросхемы фирмы Atmel типа АТ89С51 (см. фиг.5).
7) Цифро-аналоговый преобразователь, разработки заявителя, выполнен на интегральных микросхемах типа КР572ПА1, КР1533ИР27, КР544УД1 (см. фиг.5).
8) Источник питания, разработки заявителя, выполнен на основе трансформатора типа ТС-40-2 и интегральных микросхем стабилизаторов напряжения типа 7805, 7815, 7915 (см. фиг.6).
Процесс контроля оборотов вращения проводился в отношении комплектующих частей счетчиков холодной воды типа СХ - 15 “Алексеевский” и горячей воды типа СГ - 15 “Алексеевский”: отдельно для проточной части счетчика (крыльчатки) и отдельно для счетной части (индикаторного прибора) без разборки их корпусов, устанавливая вращающуюся часть счетчика магнитом в посадочное гнездо корпуса привода.
Выявлялось число оборотов на выбеге с заданной (500 об/мин) начальной скоростью вращения.
Определялось соответствие узлов с метрологическим классом “В” счетчиков по частоте вращения.
Контроль проведен 520 узлов счетчиков. Отбраковано 75 штук узлов. Соответствуют метрологическому классу “В” 445 штук узлов.
Готовые счетчики из проконтролированных узлов в количестве 220 штук прошли поверку на поверочной установке. Погрешность измерения расхода воды составила при минимальном расходе ±5% при переходном и минимальном расходе ±2%. Эти значения погрешностей являются верхними границами значений погрешности контроля узлов в описанном устройстве, что по сравнению прототипом (имеющим погрешность не менее 20%) имеет существенно лучшие показатели по точности контроля.
Как показали многочисленные исследования, с помощью описанного устройства практически осуществляется имитация работы узлов счетчика воды в рабочей среде, при этом сама среда не расходуется. Можно отметить при этом, что рабочей средой счетчиков может быть вода, жидкие нефтепродукты, промышленный газ, пропан, бутан и др.
Улучшенная технологичность устройства с одновременным повышением точности контроля окажет существенное влияние на производительность изготовления счетчиков, позволит увеличить производительность выпуска счетчиков на ≈25%, при этом снизить брак при производстве с 25% до 5%.
Таким образом, поскольку в связи с реформой жилищно-коммунального хозяйства повышается роль учета и контроля за потребляемыми ресурсами, в том числе воды, ужесточаются взаиморасчеты между поставщиками и потребителями ресурсов и увеличивается массовость поставки счетчиков воды, использование данного изобретения является актуальным и насущно необходимым.
Источники информации
1. Патент РФ №2147734, G 01 M 13/04, 1996 г. - аналог.
2. Авторское свидетельство СССР №145042, G 01 M 13/04, 1961 г. - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЫБЕГА СЧЕТНОГО МЕХАНИЗМА СЧЕТЧИКА ВОДЫ | 2008 |
|
RU2375684C1 |
| СПОСОБ КОНТРОЛЯ РАСХОДА И ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 2013 |
|
RU2532596C1 |
| АВТОНОМНЫЙ ЭЛЕКТРОННЫЙ ДВУХРЕЖИМНЫЙ РАСХОДОМЕР | 2017 |
|
RU2658107C1 |
| БЛОК КОНТРОЛЯ И УПРАВЛЕНИЯ | 2004 |
|
RU2275669C1 |
| СИСТЕМА КОНТРОЛЯ РАБОТЫ БЕСЩЕТОЧНЫХ ДВИГАТЕЛЕЙ | 2002 |
|
RU2273944C2 |
| Устройство для контроля средств числового программного управления | 1988 |
|
SU1675852A1 |
| Устройство для тестирования патронов и электродетонаторов | 2023 |
|
RU2808946C1 |
| Устройство для измерения времениВыбЕгА элЕКТРичЕСКОй МАшиНы | 1979 |
|
SU843113A1 |
| Устройство контроля скорости | 1983 |
|
SU1111190A1 |
| ЭЛЕКТРОННЫЙ ТАХОМЕТРИЧЕСКИЙ СЧЕТЧИК ДЛЯ УЧЕТА РАСХОДА ЖИДКОСТИ И ГАЗА С ДИСТАНЦИОННОЙ ПЕРЕДАЧЕЙ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ ПО РАДИОКАНАЛУ | 2018 |
|
RU2699260C1 |

Изобретение может быть использовано для определения метрологического класса счетчиков воды без использования проточной рабочей среды. Устройство содержит выполненный из немагнитного материала корпус привода вращения, имеющий посадочное гнездо в форме стакана для фиксации содержащей магнит части контролируемых узлов счетчика. В одном узле установлена крыльчатка, в другом - индикаторный прибор. Привод вращения имеет статорные обмотки вентильного двигателя, размещенные в корпусе со стороны дна посадочного гнезда, и два датчика положения ротора двигателя, выполненные в виде датчиков Холла, расположенных на боковых поверхностях двух соседних статорных обмоток. Устройство также содержит источник питания, блок коммутации статорных обмоток по сигналам датчиков положения ротора, блок управления коммутацией этих обмоток, регулируемый блок питания статорных обмоток, блок включения привода вращения и его отключения при достижении заданной скорости вращения, ЦАП и индикатор оборотов контролируемого узла. Изобретение осуществляет имитацию работы узлов счетчика в рабочей среде, имеет улучшенную технологичность и повышенную точность контроля за счет обеспечения синхронизации момента начала выбега с моментом достижения заданной начальной скорости. 6 ил.

Устройство для контроля оборотов вращающихся узлов счетчиков воды с крыльчаткой, магнитно-связанной с индикаторным прибором, в режиме выбега с заданной начальной скоростью, содержащее корпус привода вращения с посадочным цилиндрическим гнездом для фиксированной установки контролируемого узла, в корпусе размещены статорные обмотки электродвигателя привода вращения и датчики положения ротора электродвигателя, устройство также содержит источник питания, блок коммутации статорных обмоток, блок включения привода вращения и его отключения при достижении заданной скорости вращения, а также индикатор оборотов контролируемого узла, отличающееся тем, что корпус выполнен из немагнитного материала, гнездо имеет форму стакана, который углублен своим дном в тело корпуса, и предназначено для размещения в нем части контролируемого узла с магнитом, полюса которого параллельны дну стакана, статорные обмотки выполнены в виде четырех электрических катушек вентильного двигателя и расположены в корпусе со стороны дна посадочного гнезда симметрично его вертикальной оси, датчики положения ротора выполнены в виде датчиков Холла и расположены на боковых поверхностях двух соседних статорных обмоток со стороны дна посадочного гнезда, блок включения привода вращения и его отключения при достижении заданной скорости вращения выполнен в виде микроконтроллера с возможностью подсчета оборотов вращающегося узла и определения его качества, при этом устройство дополнительно снабжено блоком управления коммутацией статорных обмоток, регулируемым блоком питания статорных обмоток и цифроаналоговым преобразователем, при этом первый и второй датчики положения ротора связаны соответственно с первым и вторым входами блока управления коммутацией статорных обмоток, а первый и второй выходы этого блока соединены с первым и вторым входами микроконтроллера, третий вход которого связан с выходом индикатора оборотов контролируемого узла, первый и второй входы которого связаны соответственно с выходом микроконтроллера и с первым выходом источника питания, который одновременно связан с датчиками положения ротора, с первым входом цифроаналогового преобразователя, четвертым входом микроконтроллера, третьим входом блока, управления коммутацией статорных обмоток и первым входом блока коммутации статорных обмоток, со второго по пятый входы которого связаны соответственно с третьим по шестой входами блока управления коммутацией статорных обмоток, при этом с первого по четвертый выходы блока коммутации статорных обмоток соединены соответственно с первой по четвертую статорными обмотками, причем второй выход источника питания связан как с первым входом регулируемого блока питания статорных обмоток, так и со вторым входом цифроаналогового преобразователя, а третий выход источника питания соединен как со вторым входом регулируемого блока питания статорных обмоток, так и с третьим входом цифроаналогового преобразователя, четвертый вход которого связан с выходом микроконтроллера, а аналоговый выход цифроаналогового преобразователя соединен с третьим входом регулируемого блока питания статорных обмоток, четвертый и пятый входы которого связаны соответственно с четвертым и пятым выходом источника питания, первый и второй входы которого предназначены для подключения питающей электросети, при этом с первого по третий выходы регулируемого блока питания статорных обмоток соединены соответственно с шестым по восьмой входами блока коммутации статорных обмоток.
| Способ измерения момента трения подшипников качения | 1961 |
|
SU145042A1 |
| ПАВЛОВСКИЙ А.Н | |||
| Измерение расхода и количества жидкостей, газа и пара | |||
| М., Изд-во комитета стандартов, 1967, с.30-33 | |||
| СПОСОБ РЕЗЕРВИРОВАНИЯ СИСТЕМ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2604335C2 |
| RU 95114352 А, 20.08.1997 | |||

