Изобретение относится к области связи, в частности к способу и устройству для контролирования канала управления, используемого в системе телекоммуникации.
Ассоциация телекоммуникационной промышленности разработала стандарт для систем связи на основе многостанционного доступа с кодовым разделением каналов (МДКР) согласно временному стандарту IS-95A, который называется "Стандарт совместимости подвижной станции с базовой станцией для двухрежимной широкополосной сотовой системы связи с расширенным спектром" (далее именуемый как IS-95). В системах IS-95 подвижная станция регулирует энергию своих передач, используя комбинацию способов управления мощностью с разомкнутой системой и замкнутой системами управления. В разомкнутой системе управления мощностью подвижная станция измеряет принятую энергию сигнала прямой линии связи от обслуживающей базовой станции и регулирует энергию своей передачи на обратной линии связи в соответствии с этим измерением. В замкнутой системе управления мощностью обслуживающая базовая станция измеряет энергию передач с подвижной станции и на основании этого измерения посылает ряд команд на повышение/понижение в подвижную станцию, которая в ответ регулирует свои передачи. Система управления мощностью, применяющая замкнутую и разомкнутую системы управления мощностью, описана в патенте США №5056109 на "Способ и устройство для управления мощностью передачи в сотовой телефонной системе МДКР", принадлежащем правопреемнику настоящего изобретения и упоминаемом здесь для сведения.
В IS-95 подвижная станция должна контролировать функционирование прямого канала графика в течение всего вызова. Когда подвижная станция принимает двенадцать (N2m) последовательных неправильных кадров, она должна выключить свой передатчик, чтобы не создавать помех на обратной линии связи. После этого, если подвижная станция примет два (N3m) последовательных правильных кадра, она должна снова включить свой передатчик. Подвижная станция также содержит таймер замирания. Таймер замирания впервые активизируется, когда подвижная станция включает свой передатчик в начале вызова, и сбрасывается на пять (T5m) секунд каждый раз, когда на прямом канале графика принимаются два (N3m) последовательных правильных кадра. Если таймер замирания исчерпан, подвижная станция выключает свой передатчик, объявляет о потере прямого канала графика и прекращает вызов.
Международный союз телекоммуникаций недавно обратился с призывом представить предложения по способам обеспечения услуг высокоскоростной передачи данных и высококачественной речевой связи на каналах радиосвязи. Первое такое предложение поступило от Ассоциации телекоммуникационной промышленности под названием "МДКР 2000 ITU-R RTT" (далее именуемое как МДКР 2000). В МДКР 2000 эквивалентами прямого канала графика стандарта IS-95 являются прямой основной канал (ПОК) и прямой выделенный канал управления (ПВКУ). Кадры данных, передаваемые на этих каналах, могут иметь продолжительность 20 мс или 5 мс. Для ПОК кадр (20 или 5 мс) передается с интервалом 20 мс, согласованным с началом системного времени МДКР. Для ПВКУ передача может быть прерывистой, то есть в интервале 20 мс, согласованном с системным временем МДКР, может отсутствовать передаваемый кадр данных.
Использование методов модуляции на основе многостанционного доступа с кодовым разделением каналов (МДКР) является одним из нескольких путей облегчения связи, в которой участвует большое количество системных пользователей. Известны также и другие методы для систем связи с многостанционным доступом, такие как многостанционный доступ с временным разделением каналов (МДВР) и многостанционный доступ с частотным разделением каналов (МДЧР). Однако метод модуляции МДКР с расширенным спектром обладает существенными преимуществами по сравнению с этими методами модуляции для систем связи с многостанционным доступом. Использование методов МДКР в системах связи с многостанционным доступом описано в патенте США №4901307 на "Систему связи с многостанционным доступом в расширенном спектре с использованием спутниковых или наземных ретрансляторов" и патенте США №5103459 на "Систему и способ для формирования сигналов в сотовой телефонной системе МДКР", принадлежащих правопреемнику настоящего изобретения и упоминаемых здесь для сведения.
Являясь по существу широкополосным сигналом, МДКР обеспечивает форму частотного разнесения за счет распространения энергии сигнала по широкой полосе частот. Поэтому избирательное по частоте замирание влияет только на небольшую часть ширины полосы МДКР сигнала. Пространственное разнесение или разнесение трасс получают путем обеспечения множества трасс сигнала на одновременных линиях связи от подвижного пользователя через два или более сотовых узла. Кроме того, разнесение трасс можно получить путем использования многолучевой среды при обработке расширенного спектра, когда сигнал, приходящий с разными задержками на прохождение, принимают и обрабатывают отдельно. Примеры разнесения трасс проиллюстрированы в патенте США №5101501 на "Способ и систему для обеспечения мягкого переключения связи в сотовой телефонной системе МДКР" и патенте США №5109390 на "Приемник с разнесением в сотовой телефонной системе МДКР", принадлежащих правопреемнику настоящего изобретения и упоминаемых здесь для сведения.
В системе связи, которая обеспечивает данные с использованием модуляции формата квадратурной фазовой манипуляции (КФМ), полезную информацию можно получать из векторного произведения составляющих I и Q сигнала КФМ. Зная относительные фазы этих двух составляющих, можно приблизительно определить скорость подвижной станции относительно базовой станции. Описание схемы для определения векторного произведения составляющих I и Q в системе связи с КФМ модуляцией представлено в патенте США №5506865 на изобретение "Схема скалярного произведения для пилот-сигнала на несущей частоте", принадлежащем правопреемнику настоящего изобретения и упоминаемом здесь для сведения.
Существует все возрастающая потребность в системах радиосвязи, способных передавать цифровую информацию с высокой скоростью. Один способ отправки высокоскоростных цифровых данных с удаленной станции в центральную базовую станцию заключается в том, что удаленной станции предоставляется возможность посылать данные, используя методы МДКР с расширением спектра, как предложено в заявке на патент США №08/886604 на "Систему радиосвязи МДКР с высокоскоростной передачей данных", принадлежащей правопреемнику настоящего изобретения и упоминаемой здесь для сведения.
Необходимы новые способы контролирования ПВКУ, когда он находится в режиме прерывистой передачи (РПП), потому что подвижной станции в этом случае требуется определить, является ли принятый кадр правильным кадром, неправильным кадром или пустым кадром (т.е. передача отсутствует), и как вести передачу в зависимости от типа принимаемых кадров.
Согласно настоящему изобретению предложены способ и устройство для контролирования выделенного канала управления, используемого в системе радиосвязи. Изобретение решает ряд проблем, связанных с контролированием ПВКУ в тех случаях, когда встречается пустой кадр.
Первый вариант изобретения решает задачу усовершенствования способов, используемых в IS-95, при которых пустые кадры просто не учитываются. Подвижная станция ведет счет последовательных неправильных кадров, СЧЕТ1, счет последовательных правильных кадров, СЧЕТ2, и счет пустых кадров, СЧЕТ3. Каждый из счетов в начале вызова установлен на нуль. Для каждого принятого кадра подвижная станция определяет, является ли он правильным кадром, неправильным кадром или пустым кадром. Если принятый кадр является правильным кадром, то СЧЕТ1 и СЧЕТ3 сбрасываются на нуль, а СЧЕТ2 увеличивается на 1. Если принятый кадр является неправильным кадром, СЧЕТ1 увеличивается на единицу, а СЧЕТ2 сбрасывается на нуль. Если СЧЕТ1 достигает первого порогового уровня, ПРГ1, подвижная станция выключает свой передатчик. Если СЧЕТ2 достигает второго порогового уровня, ПРГ2, подвижная станция снова включает свой передатчик. Подвижная станция сбрасывает свой таймер замирания на Х секунд каждый раз, когда СЧЕТ2 достигает третьего порогового уровня, ПРГ3.
Если принятый кадр является пустым кадром, то СЧЕТ1 и СЧЕТ2 не изменяются, а СЧЕТ3 увеличивается на единицу. Если СЧЕТ3 достигает четвертого порогового уровня, ПРГ4, подвижная станция выключает свой передатчик. Если СЧЕТ3 достигает пятого порогового уровня, ПРГ5, подвижная станция выключает свой передатчик, если он еще не выключен, и объявляет прямой канал графика потерянным.
В другом варианте изобретения подвижная станция использует уровень (Ec/Io) принятого пилот-сигнала в активной группе для выполнения контроля ПВКУ. Согласно этому способу Ec/Io всех пилот-сигналов в активной группе суммируются и находится среднее значение за заданный интервал времени. Если это среднее значение суммы (СЗС) меньше порога для заданной продолжительности времени, то подвижная станция выключает свой передатчик. Если же СЗС остается ниже порога в течение более длительного заданного периода времени, подвижная станция выключает свой передатчик, если он еще не выключен, и объявляет прямой канал графика потерянным.
Специалистам будет понятно, что изобретение также обеспечивает ряд дополнительных преимуществ, которые станут очевидны из представленного ниже подробного описания изобретения.
В дальнейшем будут подробно описаны существенные признаки, задачи и преимущества настоящего изобретения со ссылками на прилагаемые чертежи, на которых использованы одинаковые обозначения и на которых:
фиг.1 схематически изображает элементы системы радиосвязи;
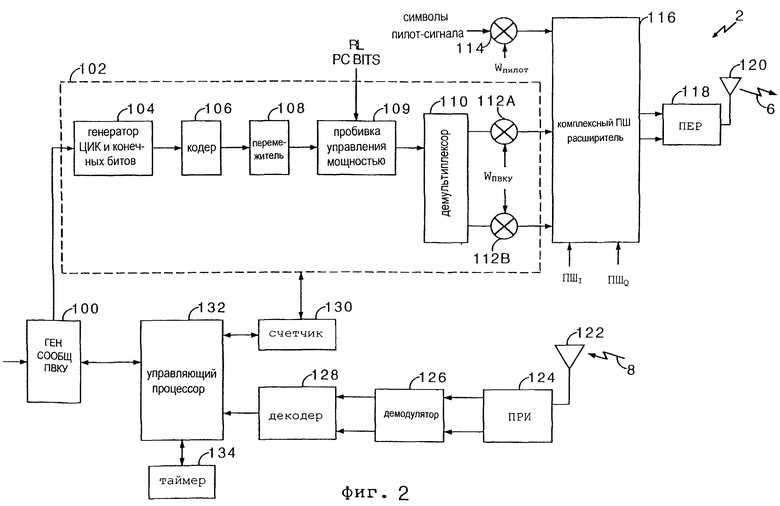
фиг.2 изображает структурную схему базовой станции согласно настоящему изобретению;
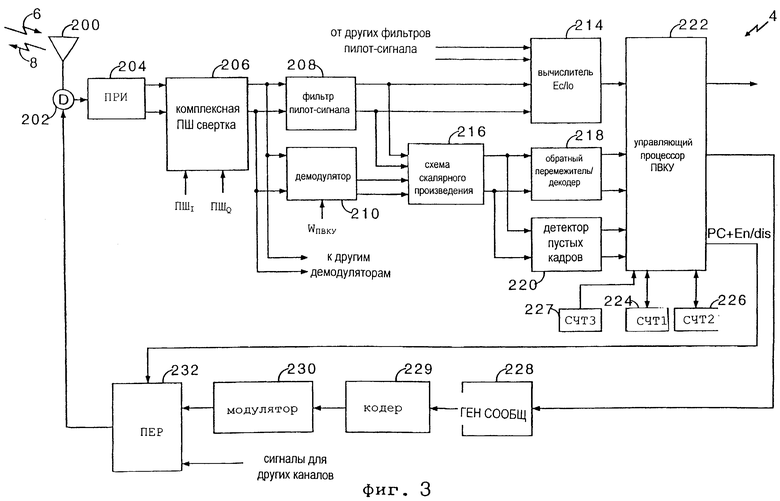
фиг.3 изображает структурную схему удаленной станции согласно настоящему изобретению.
На фиг.1 базовая станция 2 передает сигнал 6 прямой линии связи в сторону подвижной станции 4. Подвижная станция 4 передает сигналы 8 обратной линии связи в сторону базовой станции 2. В данном примерном варианте сигналы 6 прямой линии связи и сигналы 8 обратной линии связи являются сигналами связи многостанционного доступа с кодовым разделением каналов (МДКР) в соответствии с предложением Ассоциации телекоммуникационной промышленности, представленным в Международный союз телекоммуникаций (МСК) под наименованием "МДКР2000 ITU-R RTT" и дополнительно усовершенствованным в проекте стандарта "Физический слой МДКР2000".
На фиг.2 более подробно проиллюстрированы элементы, необходимые для передачи ПВКУ на сигнале 6 прямой линии связи и для приема сигнала 8 обратной линии связи. Сообщения для передачи на ПВКУ формируются в генераторе 100 сообщений ПВКУ (ГЕН СООБЩ ПВКУ). Эти сообщения могут включать сообщения планирования скорости, сообщения направления переключения и ответные сообщения, которые будут описаны ниже. ПВКУ является РПП каналом, который передается, когда имеется сообщение или сообщения для передачи с базовой станции 2 в подвижную станцию 4.
Сообщение подается в обрабатывающий элемент 102 ПВКУ. Обрабатывающий элемент 102 ПВКУ выполняет необходимую предварительную обработку, кодирование ПВКУ сообщения и канализацию сообщения для передачи на ПВКУ сигнала 6 прямой линии связи. Сообщение ПВКУ подается в генератор 104 циклического избыточного кода (ЦИК) и конечных битов. В ответ генератор 104 ЦИК и конечных битов формирует набор битов ЦИК в соответствии с битами в ПВКУ сообщении и присоединяет биты ЦИК к сообщению ПВКУ. Затем генератор 104 ЦИК и конечных битов присоединяет набор конечных битов для очистки памяти декодера в приемнике и передает полученный в результате пакет в кодер 106.
В данном примерном варианте кодер 106 является сверточным кодером, конструкция и применение которого хорошо известны. Однако настоящее изобретение в равной степени применимо и к другим типам кодеров, например блочным кодерам и турбокодерам. Кодированные символы подаются в перемежитель 108. Перемежитель 108 переупорядочивает символы заранее определенным образом, чтобы обеспечить временное разнесение в передаче сообщения ПВКУ. Операция перемежения помогает распределить результаты пакета ошибок по всему пакету, чтобы улучшить характеристики декодера в приемнике. Эти "пакеты ошибок", т.е. возникающие последовательно ошибки битов или символов, являются типичными для систем радиосвязи.
Перемеженные символы подаются в элемент 109 пробивки управления мощностью. Элемент 109 пробивки принимает биты управления мощностью обратной линии связи и пробивает биты управления мощностью в поток перемеженных символов. Биты управления мощностью передаются в подвижную станцию 4 и используются для регулировки энергии передачи сигнала 8 обратной линии связи.
Символы из элемента 109 пробивки подаются в демультиплексор 110, который поочередно выдает символы на разные тракты обработки. Первый выходной сигнал демультиплексора 110 подается в расширитель 112а, следующий выходной сигнал в расширитель 112b и так далее. Расширители 112 расширяют демультиплексированные символы в соответствии с ортогональной расширяющей функцией Wпвку. Ортогональное расширение хорошо известно специалистам, и предпочтительный вариант расширителей 112 раскрыт в вышеупомянутом патенте США №5103459. Расширенные сигналы подаются в комплексный псевдошумовой (ПШ) расширитель 116.
Кроме выделенного канала управления, базовая станция 2 передает канал управления, позволяющий подвижной станции 4 когерентно демодулировать принятый ПВКУ. Символы пилот-сигнала, обычно последовательность, состоящая только из единиц, подаются в расширитель 114. Символы пилот-сигнала расширяются в соответствии с ортогональной расширяющей последовательностью Wпилот, которая является ортогональной по отношению к расширяющей последовательности Wпвку.
Расширенные сигналы из расширителей 112 и 114 подаются в комплексный ПШ расширитель 116. Комплексный ПШ расширитель 116 расширяет сигналы из расширителей 112 и 114 в соответствии с двумя псевдошумовыми (ПШ) последовательностями ПШI и ПШQ. Комплексное ПШ расширение хорошо известно и подробно описано в предложении МДКР2000, проекте IS-2000 и упомянутой выше заявке на патент США №08/8564280. Комплексный ПШ расширенный сигнал подается в передатчик (ПЕР) 118. ПЕР 118 преобразует с повышением частоты, усиливает и фильтрует расширенные сигналы для передачи через антенну 120 в качестве сигнала 6 прямой линии связи. В примерном варианте ПЕР 118 модулирует сигнал в соответствии с форматом КФМ модуляции.
Как показано на фиг.3, сигнал 6 прямой линии связи принимается антенной 200 и подается через дуплексер 202 в приемник (ПРИ) 204. ПРИ 204 преобразует с понижением частоты, усиливает и фильтрует сигнал 6 прямой линии связи. ПРИ 204 демодулирует сигнал 6 прямой линии связи в соответствии с форматом КФМ демодуляции и выдает синфазный и квадратурный сигналы в блок 206 комплексной ПШ свертки. Блок 206 комплексной ПШ свертки свертывает принятый сигнал в соответствии с двумя псевдошумовыми последовательностями, использованными для расширения сигнала (ПШI и ПШQ). Свернутые комплексные ПШ сигналы подаются в фильтр 208 пилот-сигнала. Фильтр 208 пилот-сигнала дополнительно свертывает сигнал в соответствии с ортогональной расширяющей последовательностью Wпилот. Расширенные символы пилот-сигнал подаются в вычислитель 214 Ec/Io и схему 216 скалярного произведения.
Комплексные ПШ свернутые сигналы также подаются в демодулятор 210. Демодулятор 210 демодулирует ПШ свернутые сигналы в соответствии с ортогональным расширяющим кодом Мпвку. Свернутые сигналы затем подаются в схему 216 скалярного произведения. Схема 216 скалярного произведения вычисляет скалярное произведение ПВКУ и пилот-канала. Поскольку и пилот-канал, и выделенный управляющий канал следуют по одному и тому же тракту прохождения сигнала, они будут испытывать одинаковые фазовые сдвиги. Вычисление скалярного произведения пилот-канала и ПВКУ дает скалярный набор величин, из которого удалены неопределенности фаз, введенные в канале. Предпочтительный вариант реализации схемы 216 скалярного произведения описан в вышеупомянутом патенте США №5506865.
Результирующие демодулированные символы из схемы 216 скалярного произведения подаются в обратный перемежитель/декодер 218 и детектор 220 пустых кадров.
Обратный перемежитель/декодер 218 выполняет обратное перемежение и декодирование ПВКУ сообщения и подает оценку сообщения или сигнал, обозначающий объявление неправильного кадра, в управляющий процессор 222 ПВКУ. Существует целый ряд путей обнаружения неправильного кадра. Во-первых, можно определять, совпадает ли ЦИК, сформированный локально в подвижной станции 4, с декодированными битами ЦИК. Во-вторых, можно вычислить скорость ошибок в принятых символах путем сравнения принятых кодированных символов с группой локально сформированных повторно кодированных символов на основании декодированных битов.
Демодулированные символы из схемы 216 скалярного произведения также подаются в детектор 220 пустых кадров. Детектор 220 пустых кадров вычисляет отношение сигнал-шум демодулированных символов и сравнивает измеренное отношение сигнал-шум с некоторым порогом. Если отношение сигнал-шум ниже этого порога, то объявляется пустой кадр. Следует отметить, что существуют и другие способы определения пустого кадра, любой из которых можно использовать, не выходя за рамки объема настоящего изобретения. Способ и устройство для обнаружения пустых кадров описаны в совместно рассматриваемой заявке на патент США №09/150493 на "Систему и способ определения скорости связи на основе энергии", принадлежащей правопреемнику настоящего изобретения и упоминаемой здесь для сведения.
Кадры данных, которые не являются пустыми, подаются в управляющий процессор 222 ПВКУ, который извлекает пробитые команды управления мощностью и в ответ посылает сигнал в передатчик 232, регулирующий энергию передачи сигнала 8 обратной линии связи. Потеря этого потока команд управления мощностью приводит к невозможности управления мощностью сигнала 8 обратной линии связи, что в свою очередь повышает потенциал увеличения помех на обратной линии связи.
В первом варианте настоящего изобретения управляющий процессор 222 ПВКУ принимает из декодера 218 или детектора 220 индикацию того, что кадр является правильным, неправильным или пустым. Три счетчика: СЧТ1 224, СЧТ2 226, и СЧТ3 227, инициализируются на нуль в начале вызова. Если принятый кадр является правильным кадром, то СЧТ1 224 сбрасывается на нуль, а СЧТ2 226 увеличивается на единицу. Если принятый кадр объявлен неправильным кадром, то увеличивается СЧТ1 224, а СЧТ2 226 сбрасывается на нуль. Если кадр объявлен пустым-, то значения СЧТ1 224 и СЧТ2 226 остаются неизменными, а значение СЧТ3 227 увеличивается. Если значение СЧТ1 224 достигает порога ПРГ1, то управляющий процессор 222 ПВКУ посылает сигнал в передатчик 232 для выключения передатчика (т.е. выключения выходной мощности). После этого, если значение СЧТ2 226 достигает порога ПРГ2, то управляющий процессор 222 ПВКУ посылает сигнал в передатчик 232 для повторного включения передатчика. Аналогично, если значение СЧТ3 227 достигает порога ПРГ4, то управляющий процессор 222 ПВКУ посылает сигнал в передатчик 232 для выключения передатчика. Если значение СЧТ3 227 достигает порога ПРГ 5, то управляющий процессор 222 ПВКУ посылает сигнал в передатчик 232 для выключения передатчика, если он еще не выключен, и объявляет о потере прямого канала графика (т.е. прекращает вызов).
Во втором варианте базовая станция 2 передает кадр, именуемый контрольным кадром, через каждые N секунд, если в это время нет кадра данных, подлежащего передаче на ПВКУ. Контрольный кадр содержит заранее определенные биты, известные подвижной станции, и передается с самой низкой скоростью данных, согласованной между базовой станцией 2 и подвижной станцией 4. Как показано на фиг.2, таймер 134 отслеживает интервалы длительностью N секунд и по истечении данного интервала посылает сигнал в управляющий процессор 132. Управляющий процессор 132 определяет, имеется ли сообщение для передачи, и если его нет, подает сигнал в генератор 100 сообщений для формирования контрольного кадра. Контрольный кадр передается на канале ПВКУ, как было описано выше в отношении других сообщений ПВКУ. Затем подвижная станция 4 выполняет контроль ПВКУ на непустых кадрах, переданных в такое заранее установленное время, как это определено в IS-95, с потенциально разным значением для различных порогов. Подвижная станция 4 может также включать другие непустые кадры, принятые для цели контроля в дополнение к этим периодическим кадрам. В другом варианте подвижной станции известно, что контрольный кадр передается через каждые N секунд. Если правильный кадр не принят в течение N секунд, увеличивается СЧТ1. Этот способ можно использовать в связи с описанным выше первым вариантом.
В третьем варианте изобретения базовая станция 2 передает кадр, именуемый контрольным кадром, каждый раз, когда количество последовательных пустых кадров превосходит некоторый порог. В предпочтительном варианте контрольный кадр содержит заранее определенные биты, известные подвижной станции, и передается с самой низкой скоростью данных, согласованной между базовой станцией 2 и подвижной станцией 4. Как видно на фиг.2, управляющий процессор 132 отслеживает количество последовательных пустых кадров в соответствии с сигналами от генератора 100 сообщений. Когда количество последовательных пустых кадров превосходит пороговые значения, управляющий процессор посылает сигнал на выдачу контрольного кадра в генератор 100 сообщений для формирования контрольного кадра. Контрольный кадр передается на канале ПВКУ, как описано в отношении других сообщений ПВКУ. Затем подвижная станция 4 осуществляет контроль ПВКУ на всех непустых кадрах, как описано в IS-95, с потенциально разными значениями для различных порогов. В другом варианте управляющий процессор 132 отслеживает количество последовательных пустых кадров в заданном интервале времени N. Если правильный кадр не принят в течение интервала времени N, то СЧТ1 увеличивается и процесс продолжается, как было описано выше.
В четвертом примерном варианте изобретения подвижная станция 4 передает запросное сообщение, которое требует ответа от базовой станции 2, когда количество обнаруженных последовательных пустых кадров превосходит некоторый порог. Ответ может быть просто подтверждением того, что принято запросное сообщение. Как показано на фиг.3, управляющий процессор 222 получает индикацию относительно того, является ли кадр пустым, из детектора 220 пустых кадров. В этом варианте счетчик 224 отслеживает количество последовательных пустых кадров и сбрасывается на нуль, когда обнаруживается неправильный кадр или правильный кадр. Когда счет последовательных пустых кадров превосходит некоторый порог, управляющий процессор 222 посылает сигнал в генератор 228 сообщений (ГЕН СООБЩ), который в ответ формирует запросное сообщение. Запросное сообщение кодируется в кодере 229, модулируется в модуляторе 230 и преобразуется с повышением частоты, усиливается и фильтруется на заранее определенном канале сигнала 8 обратной линии связи. Запросное сообщение может быть любым существующим сообщением, которое уже определено в стандарте и которое не требует от базовой станции каких-либо действий, кроме отправки подтверждения, например сообщения об измерении мощности. Запросное сообщение может также быть специальным сообщением, которое вынуждает базовую станцию 2 передавать контрольный кадр на ПВКУ.
Как видно на фиг.2, запросное сообщение принимается антенной 8 и подается в приемник 124, который преобразует с понижением частоты, усиливает и фильтрует сигнал 8 обратной линии связи и подает принятый сигнал в демодулятор 126. Демодулятор 126 демодулирует сигнал, а декодер 128 декодирует демодулированные символы, подавая запросное сообщение в управляющий процессор 132. В ответ управляющий процессор 132 определяет, есть ли в очереди сообщение для передачи на ПВКУ, и если его нет, посылает сигнал, запрашивающий, чтобы генератор 100 сообщений сформировал сообщение для передачи на ПВКУ. В данном примерном варианте сообщение, формируемое генератором 100, является просто подтверждением приема запросного сообщения от подвижной станции 4.
Подвижной станции известно, что базовая станция ответит. Поэтому в другом варианте, если подвижная станция не принимает правильный кадр в течение интервала продолжительностью Т секунд после посылки запросного сообщения, увеличивается СЧТ1 и процесс продолжается, как было описано выше. В другом варианте подвижная станция содержит счетчик подтверждений, который подсчитывает, сколько раз подвижная станция делает попытку передать запросное сообщение. Если за количество К попыток не был получен ответ от базовой станции, подвижная станция выключает свой передатчик, если он еще не выключен, и объявляет о потере прямого канала графика (т.е. вызов прекращается).
В пятом варианте осуществления изобретения подвижная станция 4 передает запросное сообщение, которое требует ответа от базовой станции 2, когда количество пустых кадров, обнаруженных в заранее определенном количестве принятых кадров, превосходит некоторый порог независимо от того, являются ли пустые кадры последовательными или нет. Как показано на фиг.3, управляющий процессор 222 получает указание о том, является ли кадр пустым, от детектора 220 пустых кадров. Счетчик 224 отслеживает количество пустых кадров в режиме движущегося накопления. Когда счет пустых кадров в заранее определенном количестве принятых кадров превосходит некоторый порог, управляющий процессор 222 посылает сигнал в генератор 228 сообщений (ГЕН СООБЩ), который в ответ формирует запросное сообщение. Запросное сообщение кодируется в кодере 229, модулируется в модуляторе 230 и преобразуется с повышением частоты, усиливается и фильтруется на заранее определенном канале сигнала 8 линии обратной связи.
Как показано на фиг.2, запросное сообщение принимается антенной 122 и подается в приемник 124, который преобразует с понижением частоты, усиливает и фильтрует сигнал 8 линии обратной связи и подает принятый сигнал в демодулятор 126. Демодулятор 126 демодулирует сигнал, а декодер 128 декодирует демодулированные символы, подавая запросное сообщение в управляющий процессор 132. В ответ управляющий процессор 132 определяет, есть ли сообщение в очереди для передачи на ПВКУ, и если его нет, посылает сигнал с запросом, чтобы генератор 100 сообщений сформировал сообщение для передачи на ПВКУ. В данном примерном варианте сообщение, формируемое генератором 100, является просто подтверждением приема запросного сообщения.
Подвижной станции известно, что базовая станция ответит. Если ответ не был принят в течение Т секунд после посылки сообщения, то увеличивается СЧТ1. В другом варианте подвижная станция содержит счетчик подтверждений, который подсчитывает, сколько раз подвижная станция предпринимает попытку передать запросное сообщение. Если ответ не получен после К попыток при посылке сообщения, подвижная станция выключает свой передатчик, если он еще не выключен, и объявляет о потере прямого канала графика (т.е. прекращает вызов).
В шестом варианте осуществления изобретения подвижная станция 4 использует принятый уровень (Ec/Io) пилот-сигналов в активной группе для выполнения контроля ПВКУ. Если суммарный пилот-сигнал Ec/Io активной группы выше заданного порога, подвижная станция 4 признает данные, если они посланы в данном кадре, принятыми правильно, следовательно, это правильный кадр. В противном случае, подвижная станция 4 признает кадр неправильным. При этом правило контроля с описанным выше определением правильного кадра и неправильного кадра, подобное тому, которое описано в IS-95, можно использовать с одинаковыми или модифицированными порогами.
Как показано на фиг.3, отношение сигнал-шум (Ec/Io) полученных символов пилот-сигнала вычисляется в вычислителе 214 Ec/Io. Значение Ec/Io для пилот-сигнала 6 прямой линии связи суммируется со значением Ec/Io пилот-сигналов от других базовых станций в активной группе подвижной станции 4, чтобы получить сумму Ec/Io. Активная группа базовых станций представляет собой группу базовых станций, которые в настоящее время находятся на связи с подвижной станцией 4. Сумма Ec/Io пилот-сигналов подается в управляющий процессор 222, который сравнивает сумму Ec/Io с пороговым уровнем. Если сумма Ec/Io превосходит некоторый порог, объявляется правильный кадр, если же сумма Ес/Iо меньше этого порога, то объявляется неправильный кадр. Это позволяет подвижной станции 4 признать принятый кадр, если он не пустой, правильным кадром или неправильным кадром без декодирования кадра. На основании этих подсчетов подвижная станция 4 включает или выключает передатчик 232, как было описано ранее.
В другом варианте находится среднее значение из суммы Ес/Iо за определенные заданные интервалы времени. Если среднее суммы Ec/Io ниже порога ПРГх для первого периода времени (например, 220 мс), то подвижная станция выключит свой передатчик. После этого, если среднее суммы Ec/Io выше порога Thy для второго периода времени (например, 40 мс), подвижная станция выключит свой передатчик. Однако, если среднее суммы Ec/Io пилот-сигналов остается ниже порога ПРГх в течение более длительного третьего периода времени (например, 5 секунд), подвижная станция выключает свой передатчик, если он еще не выключен, и объявляет о потере прямого канала графика (т.е. прекращает вызов). Несмотря на то что были приведены предлагаемые продолжительности периодов времени, они являются адаптивными и могут иметь меньшую или большую продолжительность в зависимости от применения.
Представленное выше описание разных вариантов осуществления изобретения позволит специалисту осуществить или использовать настоящее изобретение. Для специалистов будут очевидны различные модификации этих вариантов, а охарактеризованные общие принципы можно применить для других вариантов, не прилагая творческих усилий. Таким образом, настоящее изобретение не ограничено описанными выше вариантами, а должно толковаться в самом широком объеме в соответствии с раскрытыми принципами и отличительными существенными признаками.
Изобретение относится к технике связи. Технический результат заключается в возможности контролирования прямого выделенного канала управления при приеме пустых кадров. Подвижная станция контролирует кадры, получаемые с базовой станции, и ведет счет неправильных, правильных и пустых кадров, именуемый соответственно СЧЕТ1, СЧЕТ2, СЧЕТ3. Если принятый кадр является правильным, СЧЕТ1 сбрасывается на нуль, а СЧЕТ2 увеличивается. Если принятый кадр является неправильным, СЧЕТ1 увеличивается, а СЧЕТ2 сбрасывается на нуль. Если принятый кадр является пустым, то СЧЕТ1 и СЧЕТ2 остаются без изменения, но увеличивается СЧЕТ3. Передатчик подвижной станции включается или выключается в зависимости от того, какой из счетов достигает заданного порогового значения или превосходит его. 2 н. и 8 з.п. ф-лы, 3 ил.
| WО 9508152 A1, 23.03.1995 | |||
| WO 9927745 A1, 03.06.1999 | |||
| WO 9747154 A1, 11.12.1997 | |||
| US 5471655 A, 28.11.1995 | |||
| СОТОВАЯ ПОДВИЖНАЯ ТЕЛЕФОННАЯ СИСТЕМА | 1993 |
|
RU2120182C1 |
