Изобретение относится к электромеханическим системам и может быть использовано в качестве привода для управления положением антенного устройства радиолокационных станций.
Известна позиционная система программного управления [1, стр.96-97, рис.36], содержащая усилитель (У), двигатель (ИД), редуктор (Р) и датчик обратной связи (ДОС). Датчик обратной связи измеряет положение вала редуктора, сигнал от датчика сравнивается с заданием и через усилитель подается на двигатель.
Наиболее близким аналогом, принятым в качестве прототипа, является гибридная электромеханическая система [2], содержащая двигатель, усилитель, редуктор, датчик обратной связи, устройство цифрового ввода-вывода, электронно-вычислительную машину, при этом к выходу усилителя подключен двигатель, вал которого сопряжен с первичным валом редуктора, вторичный вал которого сопряжен с датчиком обратной связи, первый выход датчика обратной связи соединен с входом запроса прерывания электронно-вычислительной машины, к магистрали информационного обмена которой подключено устройство цифрового ввода-вывода, первый и второй выходы датчика соединены, соответственно, с первым и вторым входами устройства определения направления, выход которого соединен с входом устройства цифрового ввода-вывода, первый выход устройства цифрового ввода-вывода соединен с входом выбора направления усилителя, второй выход устройства цифрового ввода-вывода соединен с сигнальным входом усилителя.
Недостатками известной электромеханической системы является недостаточная устойчивость системы, обусловленная необходимостью использования силового редуктора с крупным модулем колес (что приводит к наличию значительных зазоров в редукторе) и наличием значительного скручивания валов, а также высокий уровень помех, создаваемых системой.
Задачей изобретения является повышение точности системы и улучшение качества переходных процессов в системе при снижении уровня создаваемых помех.
Сущность изобретения заключается в том, что электромеханический следящий привод антенного устройства, содержащий двигатель, первый редуктор, первый датчик угла поворота, цифровую вычислительную машину (ЦВМ), первое устройство цифрового ввода-вывода, первый усилитель, дополнительно содержит второй редуктор, второй датчик угла поворота, третий датчик угла поворота, второй усилитель, первый преобразователь фаза-код, второй преобразователь фаза-код, третий преобразователь фаза-код, первый формирователь широтно-импульсно модулированного сигнала (ШИМ-сигнала), второй формирователь ШИМ-сигнала, адаптер последовательного интерфейса, второе устройство цифрового ввода-вывода, при этом на валу двигателя установлены первый редуктор, второй редуктор и третий датчик угла поворота, на вторичном валу первого редуктора установлены первый датчик угла поворота и антенное устройство, на вторичном валу второго редуктора установлены второй датчик угла поворота, первый выход первого датчика угла поворота соединен с первым входом первого преобразователя фаза-код, второй выход первого датчика угла поворота соединен с вторым входом первого преобразователя фаза-код, первый выход второго датчика угла поворота соединен с первым входом второго преобразователя фаза-код, второй выход второго датчика угла поворота соединен с вторым входом второго преобразователя фаза-код, первый выход третьего датчика угла поворота соединен с первым входом третьего преобразователя фаза-код, второй выход третьего датчика угла поворота соединен с вторым входом третьего преобразователя фаза-код, выходы сигналов данных первого, второго, третьего преобразователей фаза-код соединены между собой и соединены с первым устройством цифрового ввода-вывода, при этом младшие разряды выходов сигналов данных первого, второго, третьего преобразователей фаза-код соединены с первым входом-выходом первого устройства цифрового ввода-вывода, а старшие разряды выходов сигналов данных первого, второго, третьего преобразователей фаза-код соединены с соответствующими разрядами второго входа-выхода первого устройства цифрового ввода-вывода, оставшиеся разряды второго входа-выхода первого устройства цифрового ввода-вывода соединены с управляющими входами соответственно первого, второго, третьего преобразователей фаза-код, входы сигналов данных первого и второго формирователей ШИМ-сигнала соединены с соответствующими разрядами входа-выхода второго устройства цифрового ввода-вывода, входы-выходы магистрали данных первого и второго устройств цифрового ввода-вывода, а также адаптера последовательного интерфейса соединены с входом-выходом магистрали данных ЦВМ, входы магистрали адреса первого и второго устройств цифрового ввода-вывода, а также адаптера последовательного интерфейса соединены с выходом магистрали адреса ЦВМ, первый выход ЦВМ соединен с входом разрешения работы первого устройства цифрового ввода-вывода, второй выход ЦВМ соединен с входом разрешения работы второго устройства цифрового ввода-вывода, третий выход ЦВМ соединен с входом разрешения работы адаптера последовательного интерфейса, четвертый выход ЦВМ соединен с входами сигнала управления чтением и записью первого и второго устройств цифрового ввода-вывода, а также адаптера последовательного интерфейса, вход-выход адаптера последовательного интерфейса является входом-выходом последовательного интерфейса, выход первого формирователя ШИМ-сигнала соединен с входом первого усилителя, выход которого соединен с первой обмоткой двигателя, выход второго формирователя ШИМ-сигнала соединен с входом второго усилителя, выход которого соединен со второй обмоткой двигателя.
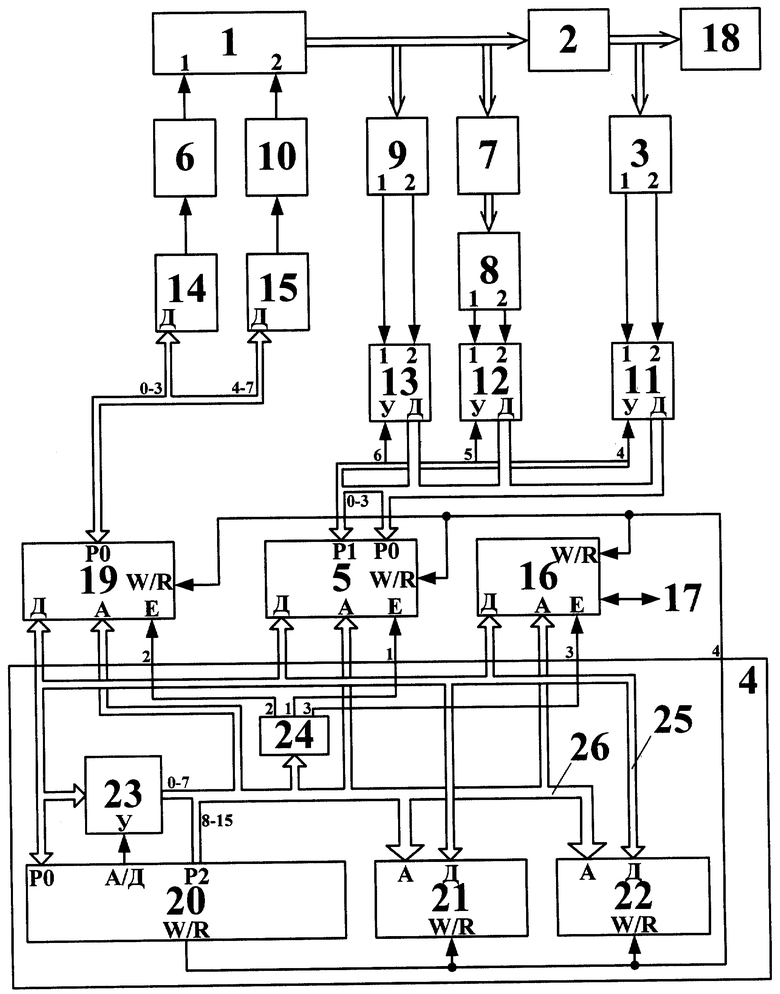
Сущность изобретения поясняется чертежом, на котором представлена функциональная схема электромеханического следящего привода антенного устройства. На чертеже обозначено:
1 - двигатель;
2 - первый редуктор;
3 - первый датчик угла поворота;
4 - цифровая вычислительная машина (ЦВМ);
5 - первое устройство цифрового ввода-вывода;
6 - первый усилитель;
7 - второй редуктор;
8 - второй датчик угла поворота;
9 - третий датчик угла поворота;
10 - второй усилитель;
11 - первый преобразователь фаза-код;
12 - второй преобразователь фаза-код;
13 - третий преобразователь фаза-код;
14 - первый формирователь ШИМ-сигнала;
15 - второй формирователь ШИМ-сигнала;
16 - адаптер последовательного интерфейса;
17 - вход-выход последовательного интерфейса;
18 - антенное устройство;
19 - второе устройство цифрового ввода-вывода;
20 - микропроцессор;
21 - оперативное запоминающее устройство;
22 - перепрограммируемое постоянное запоминающее устройство;
23 - регистр;
24 - дешифратор адреса.
На валу двигателя 1 установлены первый редуктор 2, второй редуктор 7 и третий датчик 9 угла поворота, на вторичном валу первого редуктора 2 установлены первый датчик 3 угла поворота и антенное устройство 18, на вторичном валу второго редуктора 7 установлены второй датчик 8 угла поворота, первый выход первого датчика 3 угла поворота соединен с первым входом первого преобразователя 11 фаза-код, второй выход первого датчика 3 угла поворота соединен с вторым входом первого преобразователя 11 фаза-код, первый выход второго датчика 8 угла поворота соединен с первым входом второго преобразователя 12 фаза-код, второй выход второго датчика 8 угла поворота соединен с вторым входом второго преобразователя 12 фаза-код, первый выход третьего датчика 9 угла поворота соединен с первым входом третьего преобразователя 13 фаза-код, второй выход третьего датчика 9 угла поворота соединен с вторым входом третьего преобразователя 13 фаза-код, выходы сигналов данных (Д) первого, второго, третьего преобразователей 11, 12, 13 фаза-код соединены между собой и соединены с первым устройством 5 цифрового ввода-вывода, при этом младшие разряды выходов сигналов данных (Д) первого, второго, третьего преобразователей 11, 12, 13 фаза-код соединены с первым входом-выходом (Р0) первого устройства 5 цифрового ввода-вывода, а старшие разряды выходов сигналов данных (Д) первого, второго, третьего преобразователей 11, 12, 13 фаза-код соединены с соответствующими разрядами второго входа-выхода (Р1) первого устройства 5 цифрового ввода-вывода, оставшиеся разряды второго входа-выхода (Р1) первого устройства 5 цифрового ввода-вывода соединены с управляющими (У) входами соответственно первого, второго, третьего преобразователей 11, 12, 13 фаза-код, входы сигналов данных (Д) первого и второго формирователей 14 и 15 ШИМ-сигнала соединены с соответствующими разрядами входа-выхода второго устройства 19 цифрового ввода-вывода, входы-выходы магистрали данных (Д) первого и второго устройств 5 и 19 цифрового ввода-вывода, а также адаптера 16 последовательного интерфейса соединены с входом-выходом магистрали данных ЦВМ 4, входы магистрали адреса (А) первого и второго устройств 5 и 19 цифрового ввода-вывода, а также адаптера 16 последовательного интерфейса соединены с выходом магистрали адреса ЦВМ 4, первый выход ЦВМ 4 соединен с входом разрешения работы (Е) первого устройства 5 цифрового ввода-вывода, второй выход ЦВМ 4 соединен с входом разрешения работы (Е) второго устройства 19 цифрового ввода-вывода, третий выход ЦВМ 4 соединен с входом разрешения работы (Е) адаптера 16 последовательного интерфейса, четвертый выход ЦВМ 4 соединен с входами сигнала управления чтением и записью (W/R) первого и второго устройств 5 и 19 цифрового ввода-вывода, а также адаптера 16 последовательного интерфейса, вход-выход адаптера 16 последовательного интерфейса является входом-выходом 17 последовательного интерфейса, выход первого формирователя 14 ШИМ-сигнала соединен с входом первого усилителя 6, выход которого соединен с первой обмоткой двигателя 1, выход второго формирователя 15 ШИМ-сигнала соединен с входом второго усилителя 10, выход которого соединен со второй обмоткой двигателя 1.
Двигатель 1 является бесконтактным моментным двигателем с постоянными магнитами на роторе и двумя сдвинутыми друг относительно друга на 90° обмотками на статоре. Отсутствие коллектора позволяет избавиться от помех, создаваемых вследствие искрения, возникающего в коллекторном двигателе.
Первый датчик 3 угла поворота служит для определения истинного угла поворота антенного устройства 18. Первый и второй редукторы 2 и 7 имеют одинаковые передаточные числа. Второй редуктор 7 является ненагруженным мелкомодульным редуктором, имеющим малый люфт. Первый и второй датчики 3 и 8 угла поворота имеют одинаковые цены оборота. Первый датчик 3 угла поворота служит для определения истинного углового положения антенного устройства 18. Второй датчик 8 угла поворота является датчиком обратной связи.
Первый, второй, третий датчики 3, 8, 9 угла поворота выполнены в виде синусно-косинусных вращающихся трансформаторов.
Первый, второй и третий преобразователи 11, 12 и 13 фаза-код служат для преобразования сигналов от первого, второго и третьего датчиков 3, 8 и 9 угла поворота в цифровой код. Первый, второй и третий преобразователи 11, 12 и 13 фаза-код осуществляют преобразование поступающих на их первый и второй входы сигналов (синусной и косинусной составляющих) в цифровой код, вычисление по этим данным значения фазы и передачу результата по запросу (при поступлении сигнала на управляющий вход) в ЦВМ 4. Первый, второй и третий преобразователи 11, 12 и 13 фаза-код могут содержать первый и второй аналого-цифровые преобразователи, входы которых являются первым и вторым входами преобразователя фаза-код, а выходы сигналов данных соединены с вычислительным устройством, к которому подключен регистр, выход которого является выходом сигналов данных (Д) преобразователя фаза-код, а вход разрешения работы этого регистра является управляющим (У) входом преобразователя фаза-код. Первый, второй и третий преобразователи 11,12 и 13 фаза-код могут быть выполнены также по другим известным схемам.
Первое и второе устройства 5 и 19 цифрового ввода-вывода служат для обеспечения взаимодействия ЦВМ 4 с первым, вторым и третьим преобразователями 11, 12 и 13 фаза-код и с первым и вторым формирователями 14 и 15 ШИМ-сигнала. В качестве первого и второго устройств 5 и 19 цифрового ввода-вывода могут использоваться микросхемы программируемого параллельного интерфейса, имеющие три восьмиразрядных входа-выхода (порта).
Для связи первого устройства 5 цифрового ввода-вывода с первым, вторым и третьим преобразователями 11, 12 и 13 фаза-код используются два восьмиразрядных порта. При этом один порт (например, Р0) и четыре разряда (например, четыре младших разряда с нулевого по третий) второго порта (например, Р1) используются для передачи данных, что позволяет передавать двенадцатиразрядный код. Оставшиеся разряды второго порта (Р1) используются для выдачи на управляющие входы (У) первого, второго и третьего преобразователей 11, 12 и 13 фаза-код сигналов управления (например, выход четвертого разряда порта Р1 соединен с управляющим входом первого преобразователя 11, выход пятого разряда порта Р1 соединен с управляющим входом второго преобразователя 12, выход шестого разряда порта Р1 соединен с управляющим входом третьего преобразователя 13).
Адаптер 16 последовательного интерфейса является адаптером интерфейса RS-422 и служит для приема данных от управляющей вычислительной машины о заданном угле поворота антенного устройства 18 и данных о заданном законе изменения угла поворота антенного устройства 18, а также для передачи в управляющую вычислительную машину данных о текущем угле поворота антенного устройства 18, полученных от первого датчика 3 угла поворота.
ЦВМ 4 содержит микропроцессор 20, оперативное запоминающее устройство 21, перепрограммируемое постоянное запоминающее устройство 22, регистр 23, дешифратор адреса 24.
Магистраль 25 данных ЦВМ 4 образована соответствующим входом-выходом микропроцессора 20 (портом Р0). К магистрали 25 данных подключен регистр 23, выход которого образует младшие разряды магистрали 26 адреса, старшие разряды которой образованы соответствующим входом-выходом микропроцессора 20 (портом Р2). К магистрали 26 адреса подключен дешифратор 24 адреса, а также входы сигналов адреса (А) оперативного запоминающего устройства 21 и перепрограммируемого постоянного запоминающего устройства 22. Первый, второй и третий выходы дешифратора 24 адреса являются соответственно первым, вторым и третьим выходами ЦВМ 4, четвертый выход которой образован выходом сигнала управления чтением и записью (W/R) микропроцессора 20.
Магистраль 25 данных образует вход-выход магистрали данных ЦВМ 4. Магистраль 26 адреса образует выход магистрали адреса ЦВМ 4.
Регистр 23 используется для временного хранения младших разрядов адреса в течение одного цикла чтения или записи (хранения младших разрядов адреса во время передачи данных).
ЦВМ 4 на основании данных, получаемых от второго и третьего датчиков 8 и 9 угла поворота, данных о заданном угле поворота и законе изменения угла поворота (угол поворота не изменен, вращение антенного устройства 18, перемещение антенного устройства в режиме секторного обзора) осуществляет вычисление кодов управляющих воздействий, выдаваемых на обмотки двигателя 1. Также ЦВМ 4 обеспечивает управление первым и вторым устройствами 5 и 19 цифрового ввода-вывода, адаптером 16 последовательного интерфейса, управляет приемом данных от первого, второго и третьего датчиков 3, 8 и 9 угла поворота, управляет выдачей данных в первый и второй формирователи 14 и 15 ШИМ-сигнала, а также управляет выдачей по последовательному интерфейсу в управляющую вычислительную машину данных об истинном угле поворота антенного устройства 18, полученных от первого датчика 3 угла поворота. Вычисления производится согласно следующим формулам.
α ЗАД=α BX+α ПР
Δ α =α ЗАД-α А1


α У1=Δ α У·cosα ДВ
α У2=Δ α У·sinα ДВ
где α ДВ - значение угла поворота вала двигателя, полученный при помощи третьего датчика 9 угла поворота и третьего преобразователя 13 угол-код; n - номер такта вычислений; Δ α Kmax - уровень насыщения; α A1 - значение угла поворота антенного устройства 18, полученный при помощи второго датчика 8 угла поворота и второго цифрового 12 угол-код; KOC - коэффициент обратной связи по скорости; D(z) - передаточная функция, описывающая интегродифференцирующее звено; α ЗАД - заданное значение угла поворота антенного устройства, которое формируется как сумма значения, полученного от управляющей вычислительной машины (α ВХ) и значения, вычисляемого в ЦВМ 4 согласно заданному закону изменения угла поворота антенного устройства 18 (α ПР) относительно значения α ВХ: угол поворота неизменен - α ПР константа (равно нулю); вращение антенного устройства 18 - α ПР изменяется от 0 до 360° ; перемещение антенного устройства 18 в режиме секторного обзора - α ПР изменяется в заданном диапазоне.
Коэффициент KOC и параметры интегродифференцирующего звена D(z) выбираются исходя из условия обеспечения устойчивости следящей системы и достижения заданных показателей качества управления.
Электромеханический следящий привод антенного устройства работает следующим образом.
Управляющая вычислительная машина передает по стандартному последовательному интерфейсу через вход-выход 17 последовательного интерфейса и адаптер 16 последовательного интерфейса в ЦВМ 4 данные о заданном угле поворота антенного устройства 18 и данные о заданном законе изменения угла поворота антенного устройства 18. Данные от второго и третьего датчиков 8 и 9 угла поворота через первый и второй преобразователи 12 и 13 фаза-код и первое устройство 5 цифрового ввода-вывода поступают в ЦВМ 4. ЦВМ 4 вычисляет заданное значение угла поворота α ЗАД на основании значения α ВХ, полученного от управляющей вычислительной машины и заданного закона изменения угла поворота антенного устройства 18. На основании всех этих данных ЦВМ 4 вычисляет коды управляющих воздействий α У1 и α У2. Вычисленные коды α У1 и α У2 через первое (данные о знаках величин α У1 и α У2) и второе (данные о модулях величин α У1 и α У2) устройства 5 и 19 цифрового ввода-вывода выдаются соответственно в первый и второй формирователи 14 и 15 ШИМ-сигнала, ШИМ-сигналы с которых через первый и второй усилители 6 и 10 подаются на первую и вторую обмотки двигателя 1. Данные первого датчика 3 угла поворота также передаются в ЦВМ 4 (через первый преобразователь 11 фаза-код и первое устройство 5 цифрового ввода-вывода), которая через адаптер 16 последовательного интерфейса и вход-выход 17 последовательного интерфейса передает их в управляющую вычислительную машину, где они используются при обработке радиолокационной информации, получаемой от антенного устройства 18.
Таким образом, использование датчика угла поворота, установленного на валу высокоточного ненагруженного редуктора с малым модулем колес, позволяет повысить устойчивость электромеханического следящего привода, что в свою очередь позволяет увеличить точность и улучшить качество процессов в системе. При этом наличие датчика угла поворота непосредственно на входном валу антенного устройства позволяет получать с высокой точностью данные об истинном угловом положении антенного устройства (с учетом зазоров и скручивания валов в силовом редукторе), необходимые при обработке радиолокационной информации.
Представленные чертежи и описание предлагаемого изобретения позволяют, используя существующую элементную базу, изготовить его промышленным способом и использовать в качестве привода для управления положением антенного устройства радиолокационных станций, что характеризует предлагаемое изобретение как промышленно применимое.
Источники информации
1. А.А.Вавилов, А.Д.Вальчихин, И.А.Карасин, Ф.Ф.Котченко, Н.В.Соловьев. Синтез позиционных систем программного управления. Л.: Машиностроение. Ленингр. отд-ние, 1977.
2. Свид. на ПМ 25104, МПК G 05 В 15/00. Опубл. 10.09.2002 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РЕЧЕВОГО УПРАВЛЕНИЯ АВТОМАТИЗИРОВАННЫМ РАБОЧИМ МЕСТОМ ОТРАБОТКИ АНТЕННОГО БЛОКА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2007 |
|
RU2340930C2 |
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА РАДИОЛОКАЦИОННОЙ СТАНЦИИ ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2177171C1 |
| БОРТОВОЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ВЫСОКОСКОРОСТНОГО ПОЕЗДА | 2003 |
|
RU2238208C1 |
| МНОГОПРОЦЕССОРНАЯ КОРАБЕЛЬНАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2015 |
|
RU2583741C1 |
| УСТРОЙСТВО РАДИАЛЬНО-КРУГОВОЙ РАЗВЕРТКИ ИНДИКАТОРОВ КРУГОВОГО ОБЗОРА СУДОВЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1980 |
|
SU1840930A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2004 |
|
RU2260192C1 |
| Устройство для сопряжения цифровой вычислительной машины с каналом связи | 1991 |
|
SU1837301A1 |
| СИСТЕМА ИНДИКАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2206872C2 |
| АКТИВНАЯ РАДИОЛОКАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2006 |
|
RU2313054C1 |
Изобретение относится к электромеханическим системам и может быть использовано в качестве привода для управления положением антенного устройства радиолокационных станций. Технический результат заключается в повышении точности системы и улучшении качества переходных процессов в системе при снижении уровня создаваемых помех. Сущность изобретения заключается в том, что электромеханический следящий привод антенного устройства, содержащий двигатель, первый редуктор, первый датчик угла поворота, цифровую вычислительную машину, первое устройство цифрового ввода-вывода, первый усилитель, дополнительно содержит второй редуктор, второй датчик угла поворота, третий датчик угла поворота, второй усилитель, первый преобразователь фаза-код, второй преобразователь фаза-код, третий преобразователь фаза-код, первый формирователь широтно-импульсного модулированного сигнала (ШИМ-сигнала), второй формирователь ШИМ-сигнала, адаптер последовательного интерфейса, второе устройство цифрового ввода-вывода, объединенные между собой соответствующими связями. 1 ил.
Электромеханический следящий привод антенного устройства, содержащий двигатель, первый редуктор, первый датчик угла поворота, цифровую вычислительную машину (ЦВМ), первое устройство цифрового ввода-вывода, первый усилитель, отличающийся тем, что дополнительно содержит второй редуктор, второй датчик угла поворота, третий датчик угла поворота, второй усилитель, первый преобразователь фаза-код, второй преобразователь фаза-код, третий преобразователь фаза-код, первый формирователь широтно-импульсно модулированного сигнала (ШИМ-сигнала), второй формирователь ШИМ-сигнала, адаптер последовательного интерфейса, второе устройство цифрового ввода-вывода, при этом на валу двигателя установлены первый редуктор, второй редуктор и третий датчик угла поворота, на вторичном валу первого редуктора установлены первый датчик угла поворота и антенное устройство, на вторичном валу второго редуктора установлены второй датчик угла поворота, первый выход первого датчика угла поворота соединен с первым входом первого преобразователя фаза-код, второй выход первого датчика угла поворота соединен с вторым входом первого преобразователя фаза-код, первый выход второго датчика угла поворота соединен с первым входом второго преобразователя фаза-код, второй выход второго датчика угла поворота соединен с вторым входом второго преобразователя фаза-код, первый выход третьего датчика угла поворота соединен с первым входом третьего преобразователя фаза-код, второй выход третьего датчика угла поворота соединен с вторым входом третьего преобразователя фаза-код, выходы сигналов данных первого, второго, третьего преобразователей фаза-код соединены между собой и соединены с первым устройством цифрового ввода-вывода, при этом младшие разряды выходов сигналов данных первого, второго, третьего преобразователей фаза-код соединены с первым входом-выходом первого устройства цифрового ввода-вывода, а старшие разряды выходов сигналов данных первого, второго, третьего преобразователей фаза-код соединены с соответствующими разрядами второго входа-выхода первого устройства цифрового ввода-вывода, оставшиеся разряды второго входа-выхода первого устройства цифрового ввода-вывода соединены с управляющими входами соответственно первого, второго, третьего преобразователей фаза-код, входы сигналов данных первого и второго формирователей ШИМ-сигнала соединены с соответствующими разрядами входа-выхода второго устройства цифрового ввода-вывода, входы-выходы магистрали данных первого и второго устройств цифрового ввода-вывода, а также адаптера последовательного интерфейса соединены с входом-выходом магистрали данных ЦВМ, входы магистрали адреса первого и второго устройств цифрового ввода-вывода, а также адаптера последовательного интерфейса соединены с выходом магистрали адреса ЦВМ, первый выход ЦВМ соединен с входом разрешения работы первого устройства цифрового ввода-вывода, второй выход ЦВМ соединен с входом разрешения работы второго устройства цифрового ввода-вывода, третий выход ЦВМ соединен с входом разрешения работы адаптера последовательного интерфейса, четвертый выход ЦВМ соединен с входами сигнала управления чтением и записью первого и второго устройств цифрового ввода-вывода, а также адаптера последовательного интерфейса, вход-выход адаптера последовательного интерфейса является входом-выходом последовательного интерфейса, выход первого формирователя ШИМ-сигнала соединен с входом первого усилителя, выход которого соединен с первой обмоткой двигателя, выход второго формирователя ШИМ-сигнала соединен с входом второго усилителя, выход которого соединен со второй обмоткой двигателя, при этом ЦВМ служит для вычисления кодов управляющих воздействий, выдаваемых на обмотки двигателя, на основании данных, получаемых от второго и третьего датчиков угла поворота, данных о заданном угле поворота и законе изменения угла поворота.
| Приспособление к ткацким станкам для приведения челнока в движение | 1929 |
|
SU25104A1 |
| ВАВИЛОВ А.А | |||
| и др | |||
| Синтез позиционных систем программного управления | |||
| - Л.: Машиностроение, 1977, с.96-97 | |||
| RU 2058038 C1, 10.04.1996 | |||
| US 5550953 A, 27.08.1996 | |||
| Способ правки коробленных плоских колец | 1975 |
|
SU606653A1 |

