Изобретение относится к вычислительной технике и предназначено для сбора информации от внешних источников, последующей ее обработки и выработки сигналов управления различным корабельным оружием.
Известна многопроцессорная корабельная вычислительная система по патенту РФ №2147379 на изобретение, МПК G06F 15/16, публикация 10.04.2000 г., принятая за прототип предлагаемого изобретения.
Система содержит пультовую интерфейсную магистраль, к которой подключены три пульта управления и три микроэлектронные вычислительные машины (МЭВМ) обмена с внешними системами, системную интерфейсную магистраль межпроцессорного обмена, к которой подключены МЭВМ обмена с внешними системами, а также выполненные на основе МЭВМ основные и резервные устройства формирования сигналов управления объектами (изделиями) индивидуального наведения левого и правого бортов и выполненные на основе МЭВМ устройства формирования сигналов управления объектами (изделиями) группового наведения правого и левого бортов. К выходам основного и резервного устройств формирования сигналов управления изделиями индивидуального наведения (ИИН) каждого борта подключены соответствующие устройства ввода данных в изделия, выполненные на основе исполнительных механизмов цифровых следящих систем, и блоки коммутации цепей стрельбы.
Недостатком прототипа является аппаратурная избыточность, снижающая надежность системы.
Техническим результатом предлагаемого изобретения является обеспечение пространственно-функциональной живучести и надежности системы при сокращении аппаратурных затрат.
Сущность изобретения заключается в том, что многопроцессорная корабельная вычислительная система, содержащая пульт управления, по меньшей мере, одно устройство формирования сигналов управления изделиями группового наведения (ИГН) и, по меньшей мере, одно устройство формирования сигналов управления изделиями индивидуального наведения (ИИН) первого типа, к выходам которого подключен блок устройств ввода данных, выполненных на основе исполнительных механизмов цифровых следящих систем, дополнительно содержит, по меньшей мере, одно устройство формирования сигналов управления ИИН второго типа, при этом пульт управления выполнен на основе трех микроэлектронных вычислительных машин (МЭВМ), процессоры которых объединены в сеть посредством коммутатора сети межпроцессорного обмена Ethernet, и содержит панель органов управления и индикации, на которой установлены два видеомонитора, соединенных с процессорами соответственно второй и третьей МЭВМ, клавиатура и координатно-указательное устройство, соединенные через демультиплексор с процессорами первой, второй и третьей МЭВМ, электронная панель управления, соединенная с процессором первой МЭВМ посредством магистрали последовательного канала RS-232, и панель электромеханических органов коммутации, входы-выходы которой соединены с модулем дискретного ввода-вывода, который подключен к системной шине процессора первой МЭВМ, кроме этого, в состав устройства формирования сигналов управления ИИН второго типа входят устройство выработки стрельбовых величин, устройство обмена с внешними системами по цифровым и аналоговым каналам связи, устройство обмена с внешними системами по кодовым каналам связи и устройство обмена кодовой информацией, выполненные на основе МЭВМ, при этом процессор МЭВМ устройства выработки стрельбовых величин (УВСВ) соединен посредством магистрали канала Ethernet с коммутатором сети межпроцессорного обмена пульта управления, а к его системной шине подключены адаптер мультиплексного канала, соединенный посредством магистрали мультиплексного канала с устройством формирования сигналов управления ИИН первого типа, адаптер специализированного интерфейса, через который осуществляется информационный обмен с системой гироскопической стабилизации по специализированному параллельному 26-разрядному кодовому каналу, и три модуля дискретного ввода-вывода, первый из которых совместно с соответствующими модулями цифрового преобразования угла обеспечивает ввод данных в блок устройств отработки данных выставки гироскопов ИИН второго типа, второй модуль дискретного ввода-вывода УВСВ обеспечивает программный доступ к цепям релейного обмена с устройством ввода а ИИН второго типа цифровых данных, а также обеспечивает прием релейных сигналов из системы гироскопической стабилизации и прием команд, поступающих с панели электромеханических органов коммутации пульта управления, третий модуль дискретного ввода-вывода УВСВ обеспечивает программный доступ к цепям релейного обмена с блоком коммутации цепей ввода данных в ИИН второго типа и блоком коммутации исполнительных цепей стрельбы ИИН первого типа, выход которого по сигналу предварительного включения цепей стрельбы соединен с соответствующим входом устройства формирования сигналов управления ИИН первого типа, кроме этого, процессор МЭВМ устройства обмена с внешними системами по цифровым и аналоговым каналам связи (УОВС) соединен посредством магистрали канала Ethernet с коммутатором сети межпроцессорного обмена пульта управления, а к его системной шине подключены два модуля дискретного ввода-вывода, первый из которых совместно с соответствующими модулями цифрового преобразования угла обеспечивает взаимодействие по аналоговым каналам связи с системой обнаружения торпед, гирокомпасом, лагом и автопрокладчиком курса, второй модуль дискретного ввода-вывода УОВС обеспечивает выдачу разовых команд и сигналов в радиолокационный комплекс, систему целеуказания и автопрокладчик курса и прием разовых сигналов из навигационного комплекса, радиолокационного комплекса и системы обнаружения торпед, кроме этого, МЭВМ устройства обмена с внешними системами по кодовым каналам связи (УОККС) выполнена на основе двух процессоров, связанных посредством магистралей последовательных каналов RS-232 с последовательными портами процессора УОВС, к системной шине первого процессора УОККС подключен модуль дискретного ввода-вывода, который совместно с соответствующими адаптерами специализированного интерфейса обеспечивает информационный обмен с гидроакустическим комплексом и радиолокационным комплексом, к системной шине второго процессора УОККС подключен модуль дискретного ввода-вывода, который совместно с третьим адаптером специализированного интерфейса обеспечивает информационный обмен с системой целеуказания, кроме этого, процессор МЭВМ устройства обмена кодовой информацией (УКОИ) соединен посредством магистрали последовательного канала RS-232 с последовательным портом процессора УВСВ, а к его системной шине подключен модуль дискретного ввода-вывода, обеспечивающий формирование и выдачу 24-разрядного параллельного кода с управляющими командами для передачи в устройство ввода цифровых данных.
Сущность полезной модели поясняется чертежами, на которых представлены:
фиг. 1 - структурная схема системы;
фиг. 2 - структурная схема пульта управления;
фиг. 3 - структурная схема устройства формирования сигналов управления изделиями индивидуального наведения первого типа;
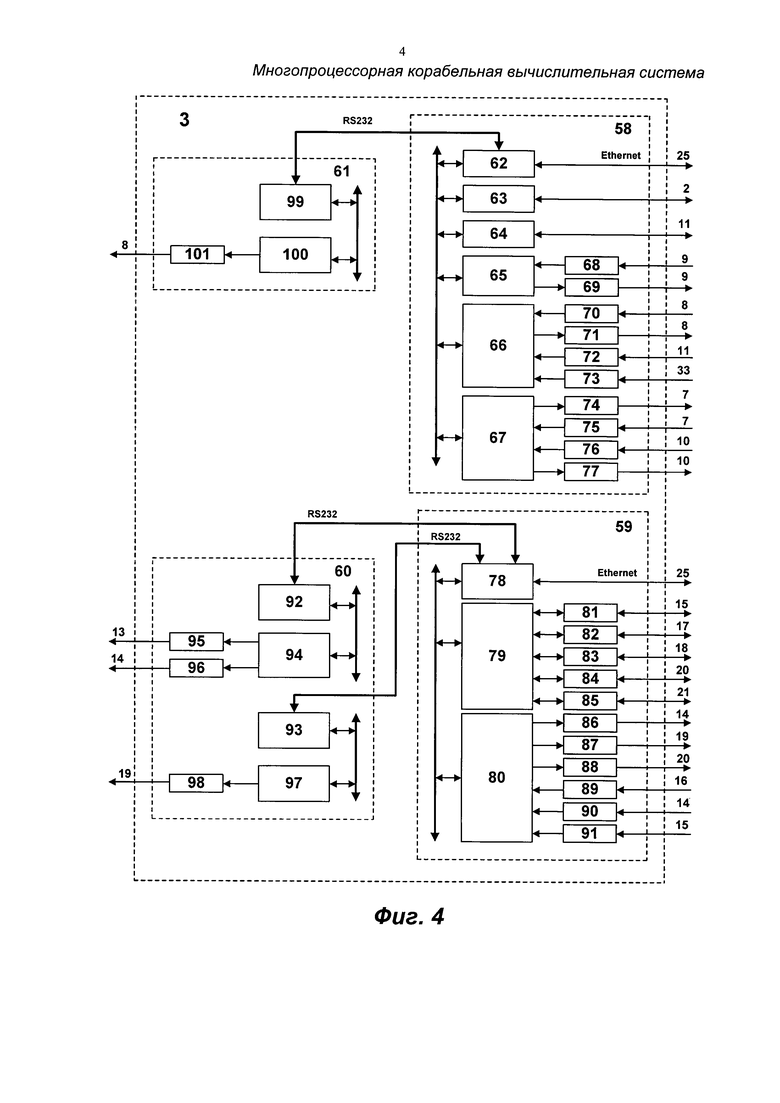
фиг. 4 - структурная схема устройства формирования сигналов управления изделиями индивидуального наведения второго типа;
фиг. 5 - структурная схема устройства формирования сигналов управления изделиями группового наведения.
На фиг. 1 структурной схемы многопроцессорной корабельной вычислительной системы обозначены:
1 - пульт управления,
2 - устройства формирования сигналов управления ИИН первого типа, расположенные по правому и левому бортам корабля;
3 - устройства формирования сигналов управления ИИН второго типа, расположенные по правому и левому бортам корабля;
4 - устройства формирования сигналов управления ИГН, расположенные по правому и левому бортам корабля;
5 - пусковые установки (ПУ) ИГН, расположенные по правому и левому бортам корабля;
6 - блок устройств ввода данных в ИИН первого типа (далее по тексту - блок устройств ввода данных);
7 - блок коммутации исполнительных цепей стрельбы ИИН первого типа (далее по тексту - блок коммутации исполнительных цепей стрельбы);
8 - устройство ввода в ИИН второго типа цифровых данных (далее по тексту устройство ввода цифровых данных);
9 - блок устройств отработки данных выставки гироскопов ИИН второго типа (далее по тексту - блок устройств отработки данных выставки гироскопов);
10 - блок коммутации цепей ввода данных в ИИН второго типа (далее по тексту - блок коммутации цепей ввода данных);
11 - система гироскопической стабилизации (СГС),
12 - система совместного применения оружия (ССПО),
13 - гидроакустический комплекс (ГАК),
14 - радиолокационный комплекс (РЛК),
15 - система обнаружения торпед (СОТ),
16 - навигационный комплекс (НК),
17 - гирокомпас,
18 - лаг,
19 - система целеуказания,
20 - автопрокладчик курса,
21 - совмещенные пусковые установки ИИН первого и второго типов (далее по тексту - совмещенные ПУ ИИН), расположенные по правому и левому бортам корабля.
Согласно фиг. 1 система содержит пульт 1 управления, соединенный посредством магистралей локальной вычислительной сети Ethernet с двумя устройствами 2 формирования сигналов управления ИИН первого типа (торпедами), двумя устройствами 3 формирования сигналов управления ИИН второго типа (ракетами) и двумя устройствами 4 формирования сигналов управления ИГН (бомбовым оружием), расположенными по правому и левому бортам корабля. Кроме этого, устройства 2 формирования сигналов управления ИИН первого типа и устройства 3 формирования сигналов управления ИИН второго типа, расположенные на одноименных бортах, соединены между собой посредством магистралей мультиплексных каналов.
Выходы каждого из устройств 2 формирования сигналов управления ИИН первого типа соединены с входами соответствующих устройств блока 6 устройств ввода данных, установленных на трубах совмещенной пусковой установки 21 ИИН. Устройства ввода данных выполнены на основе исполнительных механизмов следящих систем, валы которых кинематически связаны со шпинделями ИИН первого типа. Принцип действия и техническая реализация используемых следящих систем известны из уровня техники и подробно описаны, например в описании полезной модели к патенту РФ №71012, МПК G05B 23/02, публикация 20.02.2008.
При этом устройство 2 формирует коды направления вращения двигателей исполнительных механизмов следящих систем и величины углов поворота валов двигателей исполнительных механизмов, задающих значения глубины Н хода, дистанции D расхождения изделий в залпе, угла α расхождения изделий в залпе, курсового угла q борта цели и угла ω наведения гироскопического прибора изделия. Ввод данных в изделия производится по сигналу предварительной подготовки цепей стрельбы, поступающему в устройство 2 с первого выхода блока 7 коммутации цепей стрельбы, второй выход которого по сигналу включения цепей стрельбы соединен с ПУ ИИН 21, а управляющий вход соединен с соответствующим выходом устройства 3 формирования сигналов управления ИИН второго типа, вход которого по сигналу наличия и типа боезапаса соединен с соответствующим выходом блока 7 коммутации цепей стрельбы.
Выходы устройства 3 формирования сигналов управления ИИН второго типа, на которых формируются сигналы углового положения осей кинематического момента гироскопов ИИН второго типа, соединены с входами соответствующих устройств в составе блока 9 устройств отработки данных выставки гироскопов, выполненных на основе исполнительных механизмов следящих систем, а выход устройства 3, на котором формируются цифровые данные (полетное задание) для ввода в ИИН второго типа, соединен с устройством 8 ввода цифровых данных, выход которого соединен с соответствующим входом изделия, установленного в ПУ ИИН 21. Выходы устройств блока 9 отработки данных выставки гироскопов через блок 10 коммутации цепей ввода данных соединены с соответствующими входами изделий, установленных в ПУ ИИН 21, а управляющий вход блока 10 соединен с соответствующим выходом устройства 3 формирования сигналов управления ИИН второго типа.
Информационные входы-выходы каждого из устройств 3 формирования сигналов управления ИИН второго типа соединены с системой 11 гироскопической стабилизации, гидроакустическим комплексом 13, радиолокационным комплексом 14, системой 15 обнаружения торпед, навигационным комплексом 16, гирокомпасом 17, лагом 18, системой 19 целеуказания и автопрокладчиком 20 курса.
Информационные входы-выходы каждого из устройств 4 формирования сигналов управления ИГН соединены с системой 11 гироскопической стабилизации, системой 12 совместного применения оружия и автопрокладчиком 20 курса. Выходы каждого из устройств 4 формирования сигналов управления ИГН, на которых формируются сигналы полных углов горизонтального и вертикального наведения, сигналы глубины подрыва снарядов и сигналы включения цепей стрельбы (питания пиропатронов и запалов), соединены с соответствующими входами ПУ ИГН 5.
Пульт 1 управления предназначен для централизованного управления системой, организации вычислительного процесса, управления и контроля за ходом подготовки и применения ИИН и ИГН и отображения на мониторах этапов работы и состояния комплекса.
На фиг. 2 структурной схемы пульта 1 управления обозначены:
22, 23, 24 - процессоры первой, второй и третьей МЭВМ, соответственно;
25 - коммутатор сети межпроцессорного обмена (Ethernet);
26 - электронная панель управления (сенсорный монитор);
27, 28 - видеомониторы,
29 - панель органов управления и индикации,
30 - клавиатура,
31 - координатно-указательное устройство,
32 - демультиплексор,
33 - панель электромеханических органов коммутации,
34 - модуль дискретного ввода-вывода.
Согласно фиг. 2 пульт 1 управления содержит три МЭВМ, процессоры 22, 23, 24 которых объединены в локальную вычислительную сеть посредством коммутатора 25 сети межпроцессорного обмена Ethernet, и панель 29 органов управления и индикации, на которой установлены два видеомонитора 27, 28, соединенные с процессорами 23, 24 соответственно второй и третьей МЭВМ. Кроме этого, на панели 29 органов управления и индикации установлены клавиатура 30 и координатно-указательное устройство 31, соединенные через демультиплексор 32 с процессорами 22, 23, 24 первой, второй и третьей МЭВМ, электронная панель 26 управления, соединенная с процессором 22 первой МЭВМ посредством магистрали последовательного канала RS-232, и панель 33 электромеханических органов коммутации, входы-выходы которой соединены с модулем 34 дискретного ввода-вывода, который подключен к системной шине процессора 22 первой МЭВМ. Внешние выходы электромеханических органов коммутации, расположенных на панели 33, соединены с устройством 3 формирования сигналов управления ИИН второго типа.
Устройство 2 формирования сигналов управления ИИН первого типа предназначено для выработки стрельбовых данных для изделий с механическим вводом данных и обеспечивает расчет координат точек прицеливания, выработку сигналов управления на двигатели исполнительных механизмов соответствующих устройств блока 6 устройств ввода данных и управление системой в резервном режиме работы.
На фиг. 3 структурной схемы устройства 2 формирования сигналов управления изделиями индивидуального наведения первого типа обозначены:
35 - процессор МЭВМ устройства 2,
36, 37 - первый и второй модули дискретного ввода-вывода, включающие программируемые логические интегральные микросхемы, формирующие сигналы с широтно-импульсной модуляцией (ШИМ);
38 - адаптер мультиплексного канала,
39 - третий модуль дискретного ввода-вывода,
40 - резервный блок управления и коммутации цепей стрельбы, выполненный на основе электронной панели управления;
41, 42 - блоки преобразования (гальванической развязки) сигналов дискретного вывода,
43 - блок усилителей ШИМ сигналов,
44, 45, 46 - блоки преобразования сигналов дискретного ввода-вывода,
47 - блок коммутации резервного питания (400 Гц, 36 В) исполнительных механизмов следящих систем (ИМСС) блока 6;
48, …, 57 - модули цифрового преобразования напряжения, пропорционального углу поворота ротора вращающегося трансформатора ИМСС в цифровой код (далее по тексту - модули цифрового преобразования угла (ЦПУ).
Устройство 2 формирования сигналов управления ИИН первого типа выполнено на основе МЭВМ, процессор 35 которой соединен с коммутатором 25 сети межпроцессорного обмена пульта 1 управления посредством магистрали локальной вычислительной сети Ethernet. К последовательному порту процессора 35 подключен резервный блок 40 управления и коммутации цепей стрельбы, а к системной шине процессора подключены модули 36, 37, 39 дискретного ввода-вывода и адаптер 38 мультиплексного канала, по магистрали которого из устройства 3 формирования сигналов управления ИИН второго типа в устройство 2 формирования сигналов управления ИИН первого типа транслируются данные системы 11 гироскопической стабилизации.
Выход первого модуля 36 дискретного ввода-вывода через блок 41 преобразования сигналов дискретного (оптоизолированного) вывода соединен с входами блока 43 усилителей ШИМ сигналов, на выходах которого формируются сигналы, задающие скорость вращения двигателей исполнительных механизмов следящих систем соответствующих устройств в составе блока 6 устройств ввода данных в изделия.
Ко второму модулю 37 дискретного ввода-вывода подключены блоки 44, 45 преобразования сигналов дискретного ввода-вывода, через которые производится обмен релейными сигналами с блоком 7 коммутации исполнительных цепей стрельбы в основном и резервном режимах работы системы, а также блок 46 преобразования сигналов дискретного ввода-вывода и блок 42 преобразования сигналов дискретного вывода, предназначенные совместно с блоком 47 коммутации резервного питания ИМСС для выдачи кодов направления вращения двигателей ИМСС в устройства блока 6 в резервном режиме работы системы.
К входам-выходам модуля 39 дискретного ввода-вывода подключены модули 48, …, 57 цифрового преобразования угла, образующие совместно с модулем 39 цифровую следящую систему для отработки значений дистанции D расхождения изделий в залпе, угла α расхождения изделий в залпе, курсового угла q борта цели, угла ω наведения гироскопического прибора изделия и глубины Н хода изделия, которые вводятся в соответствующие устройства ввода данных в составе блока 6, валы исполнительных механизмов следящих систем которых кинематически связаны со шпинделями изделий первого типа.
Устройство 3 формирования сигналов управления изделиями индивидуального наведения второго типа предназначено для вычисления стрельбовых величин и цифровой информации, вводимой в изделия, а также для приема и преобразования данных от внешних систем и организации обмена между устройствами системы.
На структурной схеме устройства 3 формирования сигналов управлении изделиями индивидуального наведения второго типа, представленной на фиг. 4, приняты следующие обозначения:
58 - устройство выработки стрельбовых величин (УВСВ),
59 - устройство обмена с внешними системами по цифровым и аналоговым каналам связи (далее по тексту - устройство обмена с внешними системами (УОВС);
60 - устройство обмена с внешними системами по кодовым каналам связи (УОККС);
61 - устройство кодового обмена информацией (УКОИ),
62 - процессор УВСВ,
63 - адаптер мультиплексного канала,
64 - адаптер специализированного интерфейса (параллельный 26 разрядный кодовый канал);
65, 66, 67 - модули дискретного ввода-вывода,
68, 69 - модули цифрового преобразования угла,
70 - блок преобразования (гальванической развязки) сигналов дискретного ввода,
71 - блок преобразования сигналов дискретного вывода,
72, 73 - блоки блок преобразования сигналов дискретного ввода,
74 - блок преобразования сигналов дискретного вывода,
75, 76 - блоки преобразования сигналов дискретного ввода,
77 - блок преобразования сигналов дискретного вывода,
78 - процессор УОВС,
79, 80 - модули дискретного ввода-вывода,
81, 82, 83, 84, 85 - модули цифрового преобразования угла,
86, 87 - блоки преобразования сигналов дискретного вывода,
88 - блок релейной коммутации,
89, 90, 91 - блоки преобразования сигналов дискретного ввода,
92, 93 - процессоры УОККС,
94 - модуль дискретного ввода-вывода,
95, 96 - адаптеры специализированного интерфейса (специализированный последовательный кодовый канал по ОСТ5.8346-74);
97 - модуль дискретного ввода-вывода,
98 - адаптер специализированного интерфейса (специализированный последовательный кодовый канал по ОСТ5.8346-74);
99 - процессор УКОИ,
100 - модуль дискретного ввода-вывода, обеспечивающий формирование и выдачу 24-разрядного параллельного кода с управляющими командами;
101 - усилитель сигналов TTL-уровня.
Устройство 3 формирования сигналов управления ИИН второго типа представляет собой многопроцессорную вычислительную систему открытой архитектуры и состоит из четырех функциональных узлов: устройство 58 выработки стрельбовых величин, устройство 59 обмена с внешними системами по цифровым и аналоговым каналам связи, устройство 60 обмена с внешними системами по кодовым каналам связи и устройство 61 обмена кодовой информацией.
Устройство 58 выработки стрельбовых величин выполнено на основе процессора 62, который соединен посредством магистрали канала Ethernet с коммутатором 25 сети межпроцессорного обмена пульта 1 управления. К системной шине процессора 62 подключены адаптер 63 мультиплексного канала, соединенный магистралью мультиплексного канала с адаптером 38 мультиплексного канала устройства 2 формирования сигналов управления ИИН первого типа, а также адаптер 64 специализированного интерфейса, через который осуществляется информационный обмен с системой 11 гироскопической стабилизации по специализированному параллельному 26-разрядному кодовому каналу, и три модуля 65, 66, 67 дискретного ввода-вывода.
Модуль 65 дискретного ввода-вывода совместно с модулями 68, 69 цифрового преобразования угла обеспечивает ввод данных в блок 9 устройств отработки данных выставки гироскопов, выполненных на основе исполнительных механизмов следящих систем, посредством которых задается угловое положение осей кинематического момента гироскопов изделий. Модуль 66 дискретного ввода-вывода совместно с блоками 70, 71 преобразования сигналов дискретного ввода и вывода обеспечивает программный доступ к цепям релейного обмена с устройством 8 ввода в изделия цифровых данных. Кроме этого, модуль 66 совместно с блоками 72, 73 преобразования сигналов дискретного ввода обеспечивает прием релейных сигналов из системы 11 гироскопической стабилизации и прием команд, поступающих с панели 33 электромеханических органов коммутации пульта 1 управления.
Модуль 67 дискретного ввода-вывода совместно с блоками 74, 75 преобразования сигналов дискретного ввода и вывода обеспечивает программный доступ к цепям релейного обмена с блоком 7 коммутации исполнительных цепей стрельбы изделий первого типа, а совместно с блоками 76, 77 - с блоком 10 коммутации цепей ввода данных в изделия второго типа.
Устройство 59 обмена с внешними системами выполнено на основе процессора 78, который соединен магистралью канала Ethernet с коммутатором 25 сети межпроцессорного обмена пульта 1 управления. К системной шине процессора 78 подключены два модуля 79, 80 дискретного ввода-вывода.
Первый модуль 79 дискретного ввода-вывода совместно с модулями 81, 82, 83, 84 цифрового преобразования угла обеспечивает организацию взаимодействия по аналоговым каналам связи с системой 15 обнаружения торпед, гирокомпасом 17, лагом 18 и автопрокладчиком 20 курса, а совместно с модулем ЦПУ 85 обеспечивает преобразование аппаратного угла совмещенной пусковой установки 21 ИИН первого и второго типа.
Модуль 80 дискретного ввода-вывода совместно с блоками 86, 87 дискретного вывода обеспечивает выдачу разовых команд (напряжением ±27 В постоянного тока) в радиолокационный комплекс 14 и в систему целеуказания 19, совместно с блоком 88 релейной коммутации обеспечивает выдачу разовых сигналов переменным напряжением 50 Гц, 10B в автопрокладчик 20 курса, а совместно с блоками 89, 90, 91 преобразования сигналов дискретного ввода обеспечивает прием разовых сигналов (напряжением ±27 В постоянного тока) из навигационного комплекса 16, радиолокационного комплекса 14 и системы 15 обнаружения торпед.
Устройство 60 обмена с внешними системами по кодовым каналам связи выполнено на основе двух процессоров 92, 93, связанных магистралями последовательных каналов RS-232 с последовательными портами процессора 78 устройства 59 обмена с внешними системами.
К системной шине процессора 92 подключен модуль 94 дискретного ввода-вывода, который совместно с адаптерами 95, 96 специализированного интерфейса обеспечивает информационный обмен с гидроакустическим комплексом 13 и радиолокационным комплексом 14 по последовательным каналам ОСТ5.8346-74 и преобразование последовательного кода в параллельный код TTL уровня.
К системной шине процессора 93 подключен модуль 97 дискретного ввода-вывода, который совместно с адаптером 98 специализированного интерфейса обеспечивает информационный обмен с системой 19 целеуказания по последовательному каналу ОСТ5.8346-74 и преобразование последовательного кода в параллельный код TTL уровня.
Устройство 61 кодового обмена информацией выполнено на основе процессора 99, соединенного посредством магистрали последовательного канала RS-232 с последовательным портом процессора 62 устройства 58 выработки стрельбовых величин К системной шине процессора 99 подключен модуль 100 дискретного ввода-вывода, обеспечивающий формирование и выдачу 24-разрядного параллельного кода с управляющими командами, который через усилитель 101 сигналов TTL уровня передается в устройство 8 ввода цифровых данных (полетного задания) в изделия второго типа.
Устройство 4 формирования сигналов управления изделиями группового наведения предназначено для организации стрельбы снарядами из ПУ ИГН 5 и обеспечивает расчет координат точек прицеливания, вывод информации в изделия (наведение ПУ ИГН, ввод значений глубины взрыва в изделия, вывод сигналов «Блокировка»), выработку значений полных углов горизонтального и вертикального наведения, обмен сигналами с внешними системами.
На фиг. 5 структурной схемы устройства 4 формирования сигналов управления изделиями группового наведения обозначены:
102 - МЭВМ,
103 - процессор,
104 - модуль дискретного ввода-вывода, выполненный с программируемыми логическими микросхемами, обеспечивающими формирование импульсной последовательности сигналов, определяющих глубину подрыва изделий;
105, 106 - модули дискретного ввода-вывода,
107 - модуль цифроаналогового преобразования (ЦАП),
108 - электронная панель управления,
109 - блок усиления сигналов,
110, 111 - блоки преобразования сигналов дискретного ввода,
112 - блок преобразования сигналов дискретного вывода,
113 - блок коммутации информационных каналов связи с внешними системами,
114 -блок преобразования сигналов дискретного вывода,
115 - блок преобразования сигналов дискретного ввода,
116 - блок коммутации цепей стрельбы, выполненный на основе 24 реле, через контакты которых подается напряжение 27 В для запитывания пиропатронов и запалов ПУ ИГН 5;
117 - резервный блок управления, выполненный в виде панели электромеханических органов коммутации (кнопки, переключатели) и индикаторов;
118 - блок аварийного выброса, выполненный в виде панели электромеханических органов коммутации и индикаторов;
119 - исполнительный механизм отработки угла горизонтального наведения (УГН),
120 - исполнительный механизм отработки угла вертикального наведения (УВН),
121 - блок цифрового преобразования углов, обеспечивающий преобразование по двум каналам напряжений вращающихся трансформаторов исполнительных механизмов 119, 120 в цифровой код;
122 - блок сопряжения, предназначенный для преобразования аналоговой информации в цифровой код, выполнен на основе фазовращателя и сельсина;
123 - блок выработки полных углов горизонтального и вертикального наведения (ПУГН, ПУВН).
Согласно фиг. 5 устройство 4 формирования сигналов управления ИГН выполнено на основе МЭВМ 102, процессор 103 которой соединен магистралью канала Ethernet с коммутатором 25 сети межпроцессорного обмена пульта 1 управления. К последовательному порту процессора 103 подключена электронная панель 108 управления, предназначенная для использования в резервном режиме работы системы.
К системной шине процессора 103 подключены три модуля 104, 105, 106 дискретного ввода-вывода и цифроаналоговый преобразователь 107, к выходам которого подключены исполнительные механизмы 119, 120 отработки углов горизонтального и вертикального наведения ПУ ИГН 5. Выходы исполнительных механизмов соединены с соответствующими входами блока 121 цифрового преобразования углов и блока 123 выработки полных углов горизонтального и вертикального наведения, третий вход которого соединен с системой 11 гироскопической стабилизации, а выход по сигналам полных углов горизонтального и вертикального наведения соединен с ПУ ИГН 5. Третий вход блока 121 цифрового преобразования углов соединен с выходом блока 122 сопряжения, на который из ПУ ИГН 5 поступают сигналы текущего значения углов горизонтального и вертикального наведения, а выход блока 121 цифрового преобразования углов соединен с первым входом третьего модуля 106 дискретного ввода-вывода.
Выход модуля 106 дискретного ввода-вывода через блок 114 преобразования сигналов дискретного вывода соединен с входом блока 116 коммутации цепей стрельбы, выход которого соединен с цепями питания пиропатронов и электрозапалов ПУ ИГН 5. Второй вход модуля 106 через блок 115 преобразования сигналов дискретного ввода соединен с резервным блоком 117 управления, блоком 118 аварийного выброса и вторым выходом блока 116 коммутации цепей стрельбы.
Второй модуль 105 дискретного ввода-вывода через блоки 110, 111 преобразования сигналов дискретного ввода и блок 112 преобразования сигналов дискретного вывода соединен с блоком 113 коммутации информационных каналов связи с внешними системами, через который осуществляется обмен релейными сигналами с ПУ ИГН 5, системой 12 совместного применения оружия и автопрокладчиком 20 курса.
На выходе первого модуля 104 дискретного ввода-вывода формируется последовательность импульсных сигналов, устанавливающих значение глубины подрыва изделий, которая через блок 109 усиления сигналов поступает на двигатели ПУ ИГН 5.
Централизованное управление работой многопроцессорной корабельной вычислительной системы осуществляется с помощью пульта 1 управления, обеспечивающего взаимодействие между устройствами системы через коммутатор 25 сети межпроцессорного обмена Ethernet, посредством которого процессоры 22, 23, 24 МЭВМ пульта объединены в единую локальную вычислительную сеть с процессорами 35 устройств 2 формирования сигналов управления ИИН первого типа, процессорами 62, 78 устройств 3 формирования сигналов управления ИИН второго типа и процессорами 103 устройств 4 формирования сигналов управления ИГН.
Отображение информации на пульте 1 осуществляется на трех мониторах 26, 27, 28, которые представляют собой электронный пульт управления. Вид электронного пульта управления зависит от режима работы комплекса.
Ручной ввод данных осуществляется с помощью манипулятора 31, клавиатуры 30, электронной панели 26 управления и электронных органов управления во всплывающих окнах ручного ввода на мониторе 28.
Управление производством залпа изделий осуществляется с помощью органов управления, расположенных на панели 33: кнопок выбора борта совмещенной ПУ ИИН 21 и ПУ ИГН 5, кнопок «Залп» производства стрельбы из пусковых установок и др.
При работе системы в основном режиме в пульте 1 формируются сигналы управления, передаваемые в устройства 2 для установки в исходное состояние шпинделей изделий первого типа, в устройства 3 - для начальной выставки гироскопов изделий второго типа, в устройства 4 - для наведения пусковых установок 5.
В пульт 1 поступают:
- из устройства 58 выработки стрельбовых величин и устройства 59 обмена с внешними системами - информационные сигналы и данные целеуказания, навигации, данные метеообстановки, данные текущего астрономического времени и дата;
- из совмещенных ПУ ИИН 21 (через устройства 3) - сигналы о наличии и типе изделий в каждой трубе совмещенной пусковой установки, которые устанавливаются в блоке 7 коммутации цепей стрельбы при загрузке изделий в аппарат;
- из ПУ ИГН 5 (через устройства 4) - сигналы о наличии, типе зарядов на направляющих установки.
На экранах мониторов электронного пульта управления индицируется следующая информация:
- на мониторе 27 - местоположение своего корабля, целей, по вызову оператора - отображение траектории назначенной цели;
- на мониторе 28 - индикация о состоянии связи с внешними системами, информация, поступающая от источников навигации, целеуказания и метеообстановки, отображается фактическое наличие боезапаса в ПУ ИГН 5, тип боезапаса в ПУ ИИН 21;
- на электронной панели 26 управления (сенсорном мониторе) - клавиши меню для открытия окна управления на мониторе 28.
По информации от корабельных систем оператор на мониторе 26 нажатием клавиш, обозначающих тип и местоположение изделия (правый, левый борт), открывает панель управлении и назначает источник целеуказания.
При работе с системой 19 целеуказания в корабельную вычислительную систему поступают данные по трем целям и управляющие параметры для стрельбы: тип цели, тип применяемого оружия. В систему 19 передаются информационные сигналы о принятии целеуказания по назначенным целям и наличии боезапаса. При отсутствии данных от системы 19 или при неисправности каналов связи с ней корабельная вычислительная система переходит к работе с гидроакустическим комплексом 13 и радиолокационным комплексом 14. При работе с системой 15 обнаружения торпед корабельная вычислительная система обеспечивает противоторпедную и противолодочную защиту корабля.
Управление решением задачи выработки данных стрельбы осуществляется с пульта 1 в зависимости от расположения цели относительно корабля.
При подготовке к стрельбе ИИН первого типа используются индицируемые на электронной панели 26 органы управления: назначения источника целеуказания, типа цели, наряда залпа, способа стрельбы, ввода данных. Информация о выполненных назначениях и числовая информация, этапы подготовки стрельбы, наличие рекомендаций ручного ввода отображаются на мониторе 28 в окне «Управление». Ввод выработанных данных в ИИН первого типа оператор осуществляет нажатием клавиши «Ввод данных» на электронной панели 26.
Из пульта 1 через коммутатор 25 сети межпроцессорного обмена по каналу Ethernet в устройство 2 формирования сигналов управления ИИН первого типа поступают данные целеуказания, сигналы управления для решения задачи стрельбы изделиями.
МЭВМ устройства 2 решает задачу стрельбы и вырабатывает значения величин глубины Н хода, дистанции D расхождения изделий в залпе, угла α расхождения изделий в залпе, курсового угла q борта цели и угла ω наведения гироскопического прибора изделия. Преобразование кода величин Н, D, α, q, ω в напряжение и выработка задающих воздействий на двигатель исполнительных механизмов следящих систем устройств блока 6 устройств ввода данных производится с помощью модуля 36 дискретного ввода-вывода и блока 43 усилителей ШИМ сигналов. Ввод данных в исполнительные механизмы устройств блока 6 производится через модуль 39 дискретного ввода-вывода с использованием модулей 48, …, 57 цифрового преобразования угла, а ввод данных в изделия производится с помощью валиков, связывающих линии следящих систем со шпинделями изделий.
При положительном результате подготовки к стрельбе ИИН первого типа на мониторе 28 пульта 1 в окне «Управление» появляется сообщение «Данные введены». После принятия решения о проведении залпа оператор на панели 33 электромеханических органов коммутации нажимает кнопки «Пр Б» («ЛБ») и устанавливает специальным ключом переключатель в положение «Вкл». По этому сигналу блок 7 коммутации исполнительных цепей стрельбы подключает цепи питания на электромагниты назначенных в залп труб совмещенной ПУ ИИН 21. При стрельбе без разрешителя старта оператор нажимает кнопку «Без РС» на панели 33.
Залп реализуется в соответствии со сформированной очередностью. С началом движения изделия снимается сигнал «Наличие», при этом на экране монитора исчезает индикация данного типа изделия. Результаты стрельбы отображаются на мониторе 28.
В основном режиме работы при подготовке к стрельбе ИИН второго типа из пульта 1 по каналу Ethernet в устройство 3 поступают данные целеуказания, назначенные оператором, сигналы управления для решения задачи стрельбы. В ходе предстартовой подготовки в устройстве 58 выработки стрельбовых величин через модуль 65 дискретного ввода-вывода и модули 68, 69 ЦПУ в блок 9 устройств отработки данных выставки гироскопов вводятся значения величин, задающих угловое положение осей кинематических моментов гироскопов, через модуль 66 дискретного ввода-вывода осуществляется обмен релейными сигналами с устройством 8 ввода цифровых данных, а полетное задание в устройство 8 ввода передается через МЭВМ 99 и модуль 100 дискретного ввода-вывода в виде 24-разрядного параллельного кода.
В основном режиме работы при подготовке к стрельбе ИГН из пульта 1 по каналу Ethernet в устройство 4 формирования сигналов управления ИГН поступают данные целеуказания, сигналы управления для решения задачи стрельбы ИГН. МЭВМ 102 устройства 4 решает задачу стрельбы ИГН, вырабатывает значения углов горизонтального и вертикального наведения, глубины подрыва снарядов. Процессор 103, модуль ЦАП 107 и исполнительные механизмы 119, 120 следящих систем образуют цифровую следящую систему, которая формирует код управления на отработку величин улов горизонтального и вертикального наведения. В блоке 123 значения этих величин суммируются с величинами бортовой и килевой качки, поступающими из системы 11 гироскопической стабилизации, после чего значения полных углов горизонтального и вертикального наведения вводятся в ПУ ИГН 5. Формирование значения глубины подрыва снарядов осуществляется через регистры модуля 104 цифрового ввода-вывода и блок 109 усилителей в виде импульсов напряжением 27 В постоянного тока, поступающих в ПУ ИГН 5.
Для обеспечения безопасности стрельбы анализируется наличие сигнала запрета, поступающего из системы 12 совместного применения оружия, и в случае выхода ПУ ИГН 5 из зоны сектора стрельбы вырабатывается сигнал запрета стрельбы.
При положительном результате подготовки к стрельбе ИГН в окне «Управление» монитора 28 на панели «ИГН» появляется сообщение «Данные введены», после чего оператор устанавливает специальным ключом переключатель на панели 33 электромеханических органов коммутации в положение «Вкл». При отсутствии запрещающих сигналов блок 116 коммутации цепей стрельбы замыкает цепи питания запалов и пиропатронов снарядов. Залп формируется в соответствии с заданной очередностью. Результаты стрельбы отображаются на мониторе 28.
При невозможности использования пульта 1 управления в системе предусмотрен резервный режим работы. Подготовка и выполнение стрельбы ИИН первого типа осуществляется непосредственно устройством 2, а ИГН - устройством 4. Подготовка и выполнение стрельбы заключается в следующем.
- получение данных целеуказания по голосовой связи;
- определение оператором стрельбовых данных с использованием таблиц стрельбы;
- ручной ввод полученных значений стрельбовых данных с использованием блока 47 коммутации резервного питания исполнительных механизмов следящих систем при стрельбе ИИН первого типа и с использованием электромеханических органов коммутации резервного блока 117 управления при стрельбе ИГН;
- подключение исполнительных цепей стрельбы и производство залпа с использованием электронных панелей управления 40 и 108.
Кроме этого, система может работать в режимах тренировки личного состава (ТЛС), предназначенных для отработки навыков операторов при стрельбе ИИН и ИГН.
В режиме «ТЛС1», при работе по фактическим целям, исходные данные поступают от корабельных обеспечивающих систем и вводятся так же, как в основном режиме.
В режиме «ТЛС2» данные по подводным и надводным целям имитируются самой системой. Программная имитация движения целей производится на основании выбора одного из заложенных в банк данных варианта начальных данных о целях.
Режим эксплуатационного контроля предназначен для самопроверки системы, при этом производится программное тестирование и диагностика неисправностей комплекса.
Таким образом, предлагаемая многопроцессорная корабельная вычислительная система обладает широкими функциональными возможностями и обеспечивает высокую надежность решения боевых задач за счет использования информации от различных обеспечивающих систем как со стандартными, так и специализированными интерфейсами.
Высокая живучесть системы обеспечивается возможностью перераспределения задач как между однотипными устройствами правого и левого бортов, так и между МЭВМ пульта и МЭВМ устройств 2, 3, 4, объединенных в единую локальную вычислительную сеть.
Кроме этого, наличие резервных органов управления обеспечивает решение боевых задач при выходе из строя пульта 1 управления.
Промышленная применимость изобретения определяется тем, что предлагаемая система может быть изготовлена в соответствии с приведенным описанием и чертежами на базе известных комплектующих изделий и технологического оборудования и использована для управления различным корабельным оружием.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОРАБЕЛЬНОГО ИНФОРМАЦИОННО-УПРАВЛЯЮЩЕГО КОМПЛЕКСА | 2004 |
|
RU2267849C1 |
| МНОГОПРОЦЕССОРНАЯ КОРАБЕЛЬНАЯ УПРАВЛЯЮЩАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2000 |
|
RU2169943C1 |
| МНОГОПРОЦЕССОРНАЯ КОРАБЕЛЬНАЯ УПРАВЛЯЮЩАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА "ЛАХНА" | 1998 |
|
RU2147379C1 |
| ПРИЦЕЛ СИСТЕМЫ УПРАВЛЕНИЯ ОГНЕМ | 2014 |
|
RU2568419C2 |
| Система управления огнем боевой машины и блок управления автоматикой | 2018 |
|
RU2718186C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2010 |
|
RU2430326C1 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ОБЩЕСАМОЛЕТНЫМ ОБОРУДОВАНИЕМ | 2004 |
|
RU2263045C1 |
| ПАНОРАМНЫЙ ПРИБОР НАБЛЮДЕНИЯ КОМАНДИРА | 2018 |
|
RU2682141C1 |
| СПОСОБ КОНТРОЛЯ И УПРАВЛЕНИЯ МЕХАНИЗМАМИ АРТУСТАНОВКИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2389964C2 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2011 |
|
RU2488775C1 |




Изобретение относится к вычислительной технике и предназначено для сбора информации от внешних источников, последующей ее обработки и выработки сигналов управления различным корабельным оружием. Техническим результатом предлагаемого изобретения является обеспечение пространственно-функциональной живучести и надежности системы при сокращении аппаратурных затрат. При этом многопроцессорная корабельная вычислительная система, содержащая пульт управления, по меньшей мере, одно устройство формирования сигналов управления изделиями группового наведения и, по меньшей мере, одно устройство формирования сигналов управления изделиями индивидуального наведения (ИИН) первого типа, к выходам которого подключен блок устройств ввода данных в ИИН, выполненных на основе исполнительных механизмов цифровых следящих систем, дополнительно содержит, по меньшей мере, одно устройство формирования сигналов управления ИИН второго типа, при этом пульт управления содержит три микроэлектронных вычислительных машины (МЭВМ), процессоры которых объединены в сеть посредством коммутатора сети межпроцессорного обмена Ethernet, и панель органов управления и индикации. 5 ил.
Многопроцессорная корабельная вычислительная система, содержащая пульт управления, по меньшей мере, одно устройство формирования сигналов управления изделиями группового наведения (ИГН) и, по меньшей мере, одно устройство формирования сигналов управления изделиями индивидуального наведения (ИИН) первого типа, к выходам которого подключен блок устройств ввода данных, выполненных на основе исполнительных механизмов цифровых следящих систем, отличающаяся тем, что дополнительно содержит, по меньшей мере, одно устройство формирования сигналов управления ИИН второго типа, при этом пульт управления выполнен на основе трех микроэлектронных вычислительных машин (МЭВМ), процессоры которых объединены в сеть посредством коммутатора сети межпроцессорного обмена Ethernet, и содержит панель органов управления и индикации, на которой установлены два видеомонитора, соединенных с процессорами соответственно второй и третьей МЭВМ, клавиатура и координатно-указательное устройство, соединенные через демультиплексор с процессорами первой, второй и третьей МЭВМ, электронная панель управления, соединенная с процессором первой МЭВМ посредством магистрали последовательного канала RS-232, и панель электромеханических органов коммутации, входы-выходы которой соединены с модулем дискретного ввода-вывода, который подключен к системной шине процессора первой МЭВМ, кроме этого, в состав устройства формирования сигналов управления ИИН второго типа входят устройство выработки стрельбовых величин, устройство обмена с внешними системами по цифровым и аналоговым каналам связи, устройство обмена с внешними системами по кодовым каналам связи и устройство обмена кодовой информацией, выполненные на основе МЭВМ, при этом процессор МЭВМ устройства выработки стрельбовых величин (УВСВ) соединен посредством магистрали канала Ethernet с коммутатором сети межпроцессорного обмена пульта управления, а к его системной шине подключены адаптер мультиплексного канала, соединенный посредством магистрали мультиплексного канала с устройством формирования сигналов управления ИИН первого типа, адаптер специализированного интерфейса, через который осуществляется информационный обмен с системой гироскопической стабилизации по специализированному параллельному 26-разрядному кодовому каналу, и три модуля дискретного ввода-вывода, первый из которых совместно с соответствующими модулями цифрового преобразования угла обеспечивает ввод данных в блок устройств отработки данных выставки гироскопов ИИН второго типа, второй модуль дискретного ввода-вывода УВСВ обеспечивает программный доступ к цепям релейного обмена с устройством ввода ИИН второго типа цифровых данных, а также обеспечивает прием релейных сигналов из системы гироскопической стабилизации и прием команд, поступающих с панели электромеханических органов коммутации пульта управления, третий модуль дискретного ввода-вывода УВСВ обеспечивает программный доступ к цепям релейного обмена с блоком коммутации цепей ввода данных в ИИН второго типа и блоком коммутации исполнительных цепей стрельбы ИИН первого типа, выход которого по сигналу предварительного включения цепей стрельбы соединен с соответствующим входом устройства формирования сигналов управления ИИН первого типа, кроме этого, процессор МЭВМ устройства обмена с внешними системами по цифровым и аналоговым каналам связи (УОВС) соединен посредством магистрали канала Ethernet с коммутатором сети межпроцессорного обмена пульта управления, а к его системной шине подключены два модуля дискретного ввода-вывода, первый из которых совместно с соответствующими модулями цифрового преобразования угла обеспечивает взаимодействие по аналоговым каналам связи с системой обнаружения торпед, гирокомпасом, лагом и автопрокладчиком курса, второй модуль дискретного ввода-вывода УОВС обеспечивает выдачу разовых команд и сигналов в радиолокационный комплекс, систему целеуказания и автопрокладчик курса и прием разовых сигналов из навигационного комплекса, радиолокационного комплекса и системы обнаружения торпед, кроме этого, МЭВМ устройства обмена с внешними системами по кодовым каналам связи (УОККС) выполнена на основе двух процессоров, связанных посредством магистралей последовательных каналов RS-232 с последовательными портами процессора УОВС, к системной шине первого процессора УОККС подключен модуль дискретного ввода-вывода, который совместно с соответствующими адаптерами специализированного интерфейса обеспечивает информационный обмен с гидроакустическим комплексом и радиолокационным комплексом, к системной шине второго процессора УОККС подключен модуль дискретного ввода-вывода, который совместно с третьим адаптером специализированного интерфейса обеспечивает информационный обмен с системой целеуказания, кроме этого, процессор МЭВМ устройства обмена кодовой информацией (УКОИ) соединен посредством магистрали последовательного канала RS-232 с последовательным портом процессора УВСВ, а к его системной шине подключен модуль дискретного ввода-вывода, обеспечивающий формирование и выдачу 24-разрядного параллельного кода с управляющими командами для передачи в устройство ввода цифровых данных.
| МНОГОПРОЦЕССОРНАЯ КОРАБЕЛЬНАЯ УПРАВЛЯЮЩАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА "ЛАХНА" | 1998 |
|
RU2147379C1 |
| Приспособление для отжига металлических лент в электрической печи | 1929 |
|
SU25618A1 |
| Автоматическая сцепка для рудничных вагонеток | 1949 |
|
SU87815A1 |
| ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА РАДИОЛОКАЦИОННОЙ СТАНЦИИ ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2177171C1 |
| Устройство для подачи и резки марли в проволоко-швейных машинах | 1940 |
|
SU58749A1 |
| КОМАНДНО-СТРЕЛЬБОВАЯ ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА | 2001 |
|
RU2191430C1 |
| Устройство для отбраковки пружин бурдона по их упругим свойствам | 1939 |
|
SU58748A1 |
| US 5247673 A1, 21.09.1993 | |||
| US 4965809 A1, 27.12.1877 | |||
| US 3959775 A1, 25.05.1876. | |||

