Область техники
Настоящее изобретение относится к устройству, предназначенному для получения, обработки и вывода на дисплей контролируемых данных о велосипеде в процессе езды на нем, т.е. информации относительно скорости движения, частоты вращения педалей, выбранной передачи, пройденного расстояния и т.п. Подобные устройства применительно к транспортным средствам получили название "цикловых компьютеров" (cycle computers - см., например, патент США № 5511435, 1996). Применительно к цикловым компьютерам для велосипедов используется также более конкретный термин "велокомпьютеры" (см., например, проспекты фирм WINORA®, 1994. CATEYE®, 1996, SIGMA SPORT®, 1996).
Уровень техники
Известны различные варианты цикловых велокомпьютеров (см., например, патенты США № 5264791, 1993 и № 5497143, 1996). Типичный велокомпьютер содержит заключенный в корпус основной модуль с автономным (например, батарейным) источником питания и с дисплеем на его передней стенке для указания, по выбору велосипедиста, таких контролируемых данных, как скорость, время работы педалями, частота оборотов педалей и т.д. (см. патент США №5335188, 1994 г.), а также модуль обработки сигналов, предназначенный для соединения с множеством датчиков и для приема контролируемых данных от датчиков в параллельном формате. В данном цикловом компьютере, так же как и в других известных компьютерах этого типа, модуль обработки сигналов входит в состав основного модуля, т.е. устанавливается внутри его корпуса.
Ввиду того, что цикловой велокомпьютер используется, в основном, на открытом воздухе, он должен быть не только компактным, но также и водонепроницаемым, антиударным и стойким к погодным условиям. В дополнение к этому для предотвращения кражи основной модуль велокомпьютера предпочтительно может быть переносным с возможностью снятия с велосипеда.
Проблемы, связанные с обеспечением стойкости велокомпьютеров со съемным основным модулем к погодным условиям, иллюстрируются фиг.1-7, на которых представлен обычный имеющийся в продаже цикловой велокомпьютер, совпадающий по своим основным существенным признакам с велокомпьютером по указанному патенту США № 5335188 и принятый в качестве прототипа.
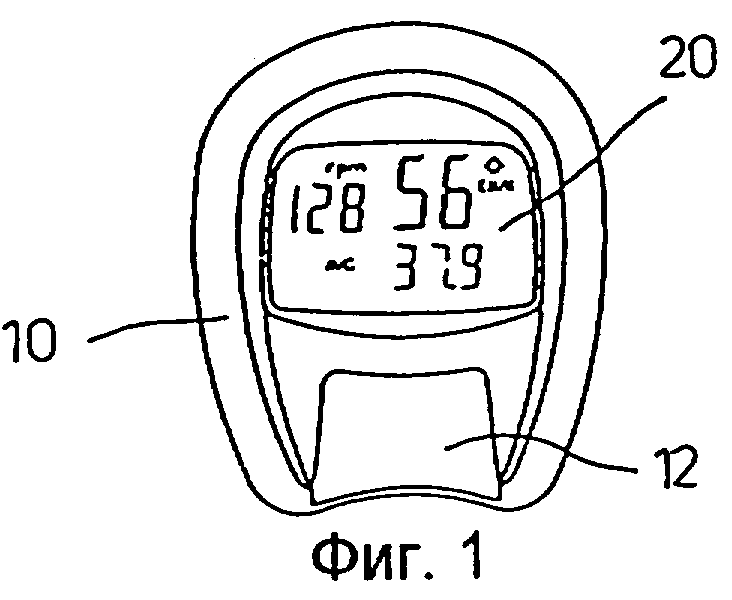
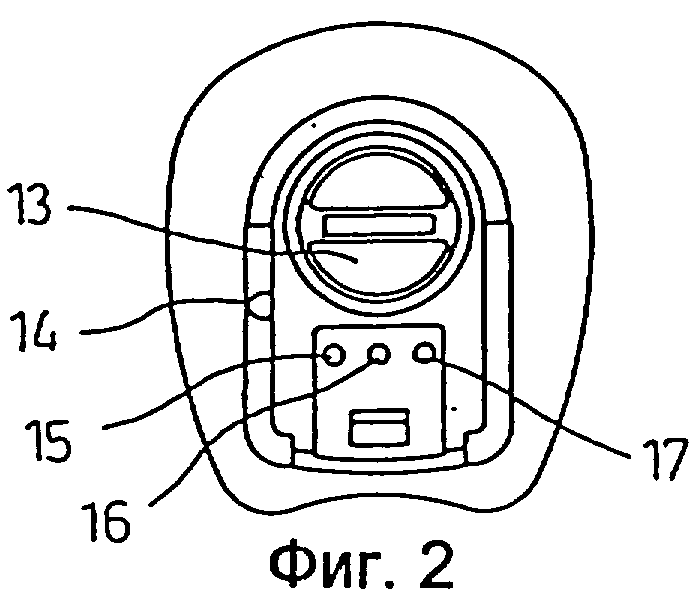
Как показано на фиг.1, известный велокомпьютер включает основной модуль, находящийся в корпусе 10, выполненном в виде отдельного узла, и дисплей 20 на передней стороне корпуса 10 основного модуля для отображения таких данных, как скорость, пройденное расстояние и т.д. Кнопка 12 для выбора различных наборов данных на дисплее 20 расположена под дисплеем 20. На фиг.2 показана задняя сторона корпуса 10 основного модуля, где имеются крышка 13 отделения для батарей, кнопка 14 режима для переключения различных режимов представления данных и металлические выводы 15 и 16. Выводы 15 и 16 служат для передачи сигналов, представляющих данные замера скорости и частоты вращения педалей и поступающих от датчиков к процессору (не показан), установленному внутри корпуса 10 основного модуля. Имеется также металлический вывод 17 для обеспечения заземления.
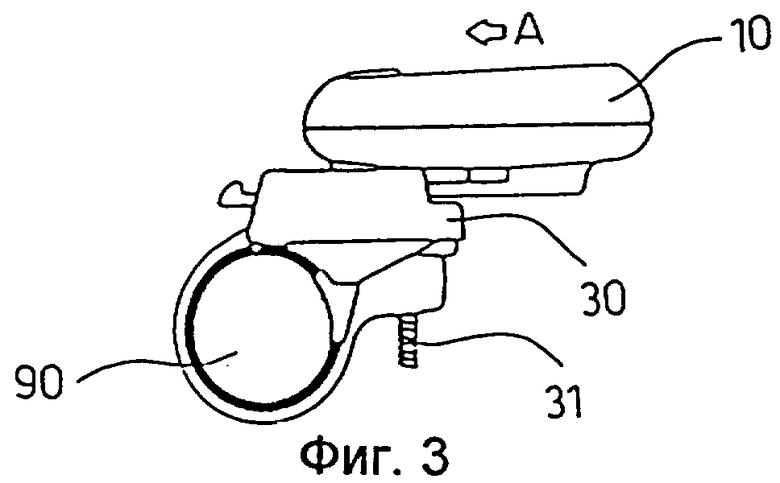
Как показано на фиг.3, для обеспечения съемности корпуса 10 основного модуля цикловой велокомпьютер обычно оснащается держателем 30 для крепления винтами 31 на руле 90 велосипеда. Корпус 10 основного модуля может быть съемно установлен на держателе 30 движением по стрелке А на фиг.3. Таким образом, каждый раз, когда велосипедист не пользуется велосипедом, он может легко снять корпус 10 основного модуля с держателя 30, а затем снова установить его на место.
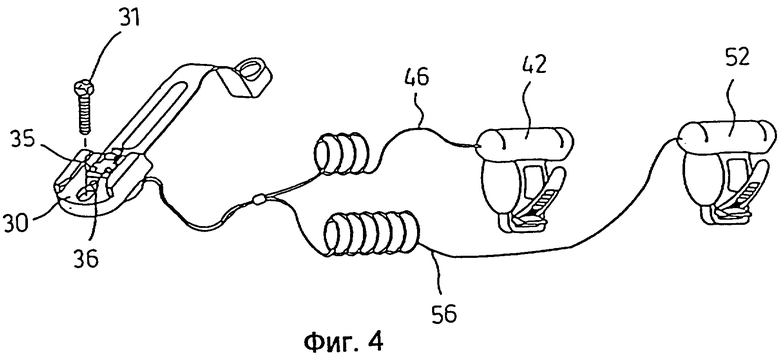
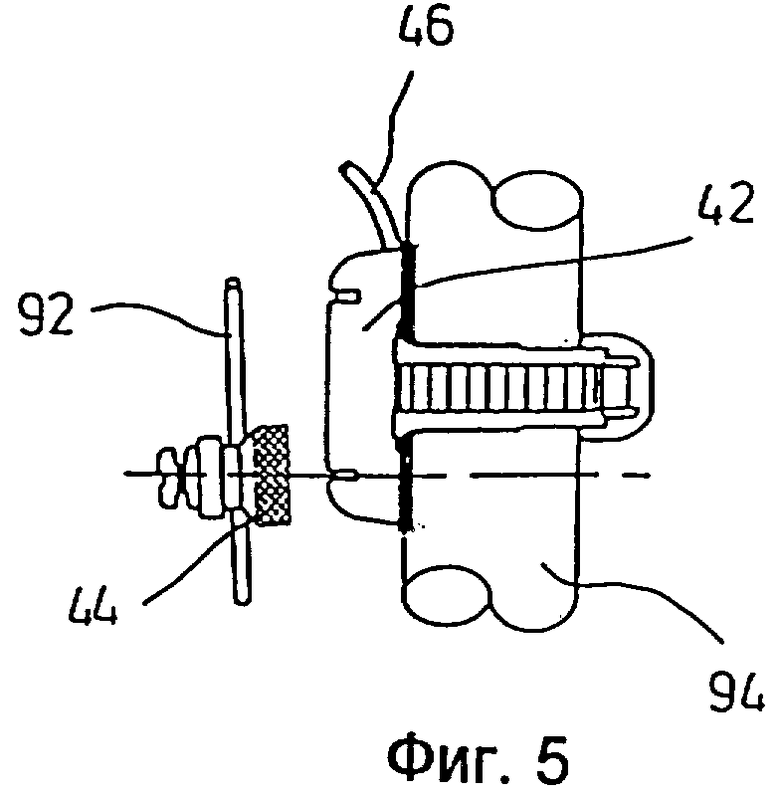
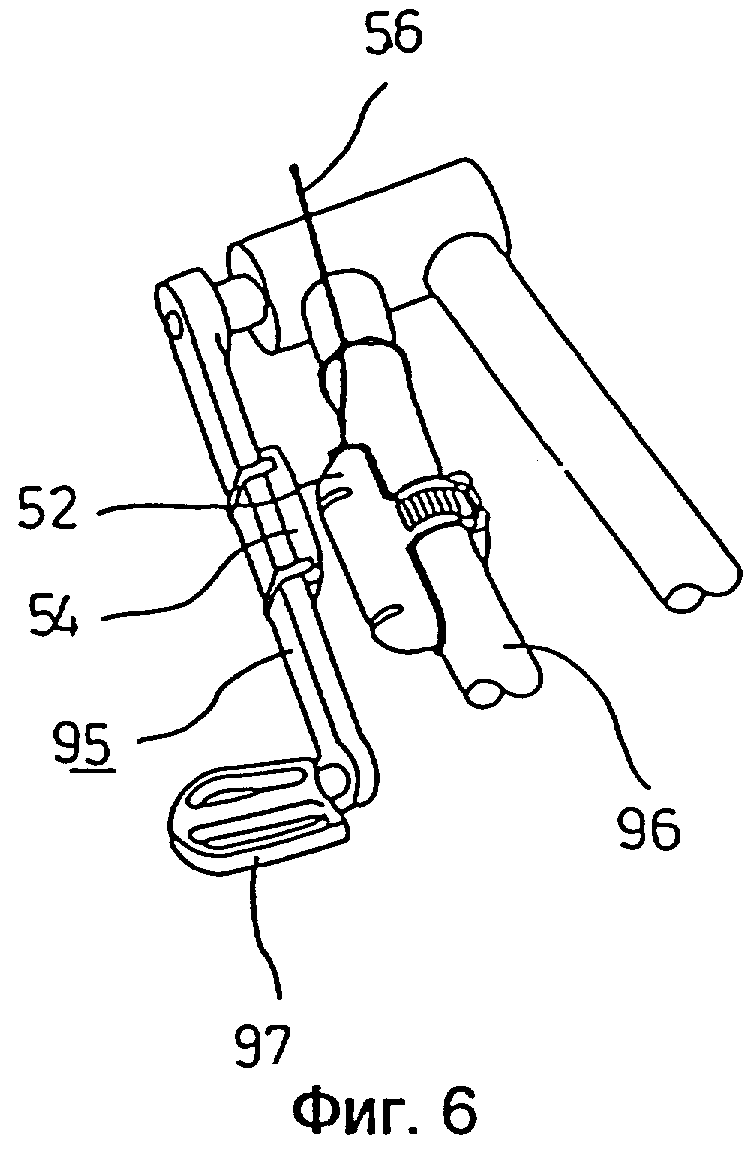
На фиг.4 показано соединение между держателем 30 по фиг.3 и двумя датчиками 42 и 52 с помощью проводов 46 и 56. На фиг.5 показано относительное положение магнита 44, который установлен на спице 92 переднего колеса, и датчика 42 по фиг.4, который установлен на внутренней стороне вилки 94 и обращен к магниту 44. На фиг.6 показано относительное положение магнита 54, который установлен на внутренней стороне рычага 95 педали 97, и датчика 52 по фиг.4, который установлен на опоре 96 цепи и обращен к магниту 54.
В наборе различных контролируемых данных, которые могут быть представлены на дисплее 20, кроме сигналов текущего времени, формируемых встроенной тактовой схемой в основном модуле, все данные, включая скорость, расстояние, частоту вращения педалей и т.д., обеспечиваются сигналами, получаемыми от датчиков 42 и 52, установленных соответственно на вилке 94 и опоре 96 цепи. Датчики 42 и 52 определяют число оборотов переднего колеса и рычага 95 педали путем взаимодействия с соответствующими магнитами 44 и 54. Датчики 42 и 52 передают воспринятые сигналы к держателю 30 по проводам 46 и 56. Далее сигналы передаются к процессору (не показан), установленному внутри корпуса 10 основного модуля через имеющиеся на держателе 30 металлические выводы 35 и 36. Эти выводы находятся в электрическом контакте с выводами 15 и 16 на задней стенке корпуса 10 основного модуля, когда он установлен на держателе 30. Микропроцессор выполняет, например, идентификацию, подсчет и вычисления по полученным сигналам частоты вращения колес и частоты вращения педали, далее обработанные сигналы выводятся на дисплей 20.
Так, например, процессор основного модуля вычисляет скорость путем умножения частоты вращения колеса на длину окружности колеса и вычисляет пройденное расстояние на основе вычисленной скорости. Дополнительно на дисплее может быть представлена текущая или средняя частота вращения педалей для того, чтобы облегчить велосипедисту регулирование режима движения.
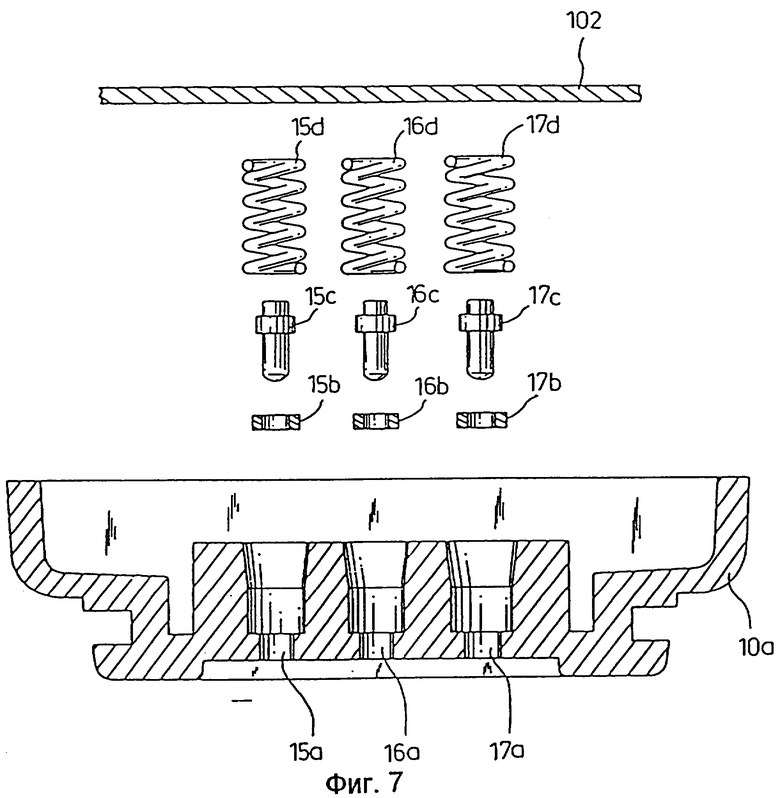
Таким образом, поскольку корпус 10 основного модуля циклового велокомпьютера связан с двумя датчиками 42 и 52, необходимо предусмотреть два вывода 15 и 16 для передачи сигналов от двух датчиков к процессору (предпочтительно в виде микропроцессора) в основном модуле и вывод 17 для общего заземления. В итоге необходимо обеспечить на задней стороне корпуса 10 основного модуля, по меньшей мере, три вывода. Каждый из трех выводов 15, 16 и 17 должен быть установлен на задней стороне корпуса 10 основного модуля с обеспечением водонепроницаемости, чтобы не допустить проникновения воды внутрь корпуса 10 основного модуля и не вызвать короткого замыкания. Типовое устройство водонепроницаемой установки выводов показано на фиг.7. В основании нижней части 10а корпуса 10 основного модуля выполнены гнезда 15а, 16а и 17а. Водонепроницаемые уплотнительные кольца 15b, 16b и 17b расположены соответственно в гнездах 15а, 16а и 17а. Контактные штыри 15с, 16с и 17с вставлены в гнезда таким образом, чтобы проходить через уплотнительные кольца и выступать из гнезд. Пружины сжатия 15d, 16d и 17d установлены между печатной платой 102 и контактными штырями 15с, 16с и 17с и отжимают их наружу. Очевидно, что водонепроницаемая установка контактов сравнительно сложна и требует высоких затрат в изготовлении.
Вслед за современным развитием устройств переключения передач на велосипедных рулях и электронных средств переключения передач возникла потребность в цикловых велокомпьютерах нового поколения, которые в дополнение к сигналам скорости, расстояния, времени и частоты вращения педалей могут также показывать, какая передача выбрана, величину крутящего момента на коленчатом валу, температуру воздуха, географическую высоту и даже частоту пульса велосипедиста (см., например, указанный патент США № 5335188). Это означает значительное увеличение числа датчиков, а следовательно, и металлических выводов на задней стороне основного модуля и соответствующих металлических выводов на держателе. Из-за увеличения числа металлических выводов трудно сохранить компактность основного модуля. Кроме того, необходимо обеспечить водонепроницаемую установку каждого из выводов, что чрезвычайно усложняет конструкцию и повышает стоимость изготовления.
Сущность изобретения
С учетом указанной проблемы изобретение направлено на решение задачи создания циклового велокомпьютера, свободного от присущего известным велокомпьютерам ограничения, накладываемого допустимым количеством металлических выводов или контактов в его основном модуле на количество используемых видов данных. За счет снятия указанного ограничения велокомпьютер по изобретению способен принимать и отображать на своем дисплее во время езды на велосипеде неограниченное количество видов информации, подаваемой на вход велокомпьютера. Более конкретная задача заключается в обеспечении возможности увеличить по сравнению с обычными цикловыми велокомпьютерами количество видов информации, отображаемой во время езды, без увеличения количества используемых металлических выводов или контактов.
Техническим результатом, достигаемым в изобретении, является возможность велокомпьютера получать сигналы от большего количества датчиков и, соответственно, выдавать больше сигналов без увеличения числа контактов на корпусе основного модуля. Благодаря этому конструкция основного модуля остается простой и компактной при любом количестве датчиков.
Решение названных задач достигается в цикловом велокомпьютере, содержащем процессор, множество датчиков и корпус основного модуля, снабженный дисплеем и выполненный в виде отдельного узла с возможностью съемной установки на держателе при установке указанного велокомпьютера на велосипед. Согласно изобретению указанный процессор является вспомогательным, установлен в указанном держателе и выполнен с возможностью приема в параллельном формате контролируемых данных от множества датчиков и выдачи в последовательном формате сигналов, соответствующих данным от указанных датчиков, при этом велокомпьютер содержит основной процессор, установленный в корпусе основного модуля и выполненный с возможностью приема данных в последовательном формате от вспомогательного процессора и выдаче на дисплей данных, подлежащих отображению.
При этом желательно, чтобы цикловой велокомпьютер содержал также кнопку или кнопки для подачи сигналов в параллельном формате на вспомогательный процессор.
Указанное множество датчиков включает, по меньшей мере, два датчика, выбранных предпочтительно из группы, состоящей из датчика скорости колеса, датчика частоты вращения педалей, датчика положения переднего переключателя, датчика положения заднего переключателя, датчика крутящего момента, датчика состояния кнопочного переключателя и датчика различных физиологических показателей велосипедиста.
Вспомогательный процессор может быть снабжен выводом для выведения управляющего сигнала.
В конкретных предпочтительных вариантах осуществления указанный держатель содержит:
первый выходной контакт, функционально связанный со вспомогательным процессором для приема от вспомогательного процессора сигналов в последовательном формате; и
второй выходной контакт, функционально связанный со вспомогательным процессором для приема от вспомогательного процессора синхронизирующего сигнала.
Соответственно, корпус основного модуля содержит:
первый входной контакт, функционально связанный с основным процессором для передачи основному процессору сигналов в последовательном формате; и
второй входной контакт, функционально связанный с основным процессором для передачи основному процессору синхронизирующего сигнала.
В данном варианте выполнения первый выходной контакт способен замыкаться с первым входным контактом, а второй выходной контакт способен замыкаться со вторым входным контактом. В результате передача сигналов в последовательном формате от вспомогательного процессора в основной процессор осуществляется только через указанные первый выходной и первый входной контакты, а передача синхронизирующего сигнала от вспомогательного процессора в основной процессор осуществляется только через указанный второй выходной и второй входной контакты.
Альтернативно велокомпьютер может содержать:
первую линию передачи сигналов, соединяющую вспомогательный и основной процессоры для передачи сигналов в последовательном формате от вспомогательного процессора к основному процессору, и
вторую линию передачи сигналов, соединяющую вспомогательный и основной процессоры для передачи синхронизирующего сигнала в последовательном формате от вспомогательного процессора в основной процессор.
В этом варианте выполнения передача сигналов в последовательном формате от вспомогательного процессора в основной процессор осуществляется только по первой линии передачи сигналов, а передача синхронизирующего сигнала от вспомогательного процессора в основной процессор осуществляется только по второй линии передачи сигналов.
В данном варианте передача управляющих сигналов осуществляется от основного процессора во вспомогательный процессор предпочтительно только по указанной первой линии передачи сигналов, причем вспомогательный процессор предпочтительно содержит контакт для выведения команды управления при получении указанных управляющих сигналов.
Представляется также желательным, чтобы в велокомпьютере по изобретению держатель был снабжен третьим выходным контактом для соединения с проводом заземления, связанным с контактом заземления вспомогательного процессора, а корпус основного модуля - третьим входным контактом, функционально связанным с основным процессором для обеспечения соединения основного процессора со схемой заземления. При этом третий выходной контакт способен замыкаться с третьим входным контактом, и соединение основного процессора со схемой заземления должно осуществляться только через эти третий выходной и третий входной контакты.
Альтернативно велокомпьютер по изобретению может дополнительно содержать третью линию передачи сигналов для соединения основного процессора с проводом заземления, связанным с контактом заземления вспомогательного процессора. При этом соединение основного процессора со схемой заземления должно осуществляться только по третьей линии передачи сигналов.
Задача изобретения решена также в цикловом велокомпьютере, содержащем держатель для установки указанного велокомпьютера на велосипед, корпус основного модуля, выполненный в виде отдельного узла с возможностью съемной установки в указанном держателе, процессор и множество датчиков для обеспечения процессора контролируемыми данными. Согласно изобретению указанный процессор является вспомогательным процессором, а велокомпьютер содержит основной процессор, установленный в корпусе основного модуля и выполненный с возможностью приема данных в последовательном формате от вспомогательного процессора, причем вспомогательный процессор выполнен с возможностью приема в параллельном формате контролируемых данных от множества датчиков и выдачи в последовательном формате сигналов, соответствующих данным от указанных датчиков, в основной процессор.
Задача изобретения решена также в цикловом велокомпьютере, содержащем держатель для установки указанного велокомпьютера на велосипед, корпус основного модуля, выполненный в виде отдельного узла с возможностью съемной установки в указанном держателе, и процессор, выполненный с возможностью приема контролируемых данных. Согласно изобретению указанный процессор является вспомогательным и установлен в указанном держателе, а велокомпьютер содержит основной процессор, установленный в корпусе основного модуля, причем вспомогательный процессор выполнен с возможностью приема указанных контролируемых данных в параллельном формате и выдачи в последовательном формате в основной процессор сигналов, соответствующих данным, поступающим в параллельном формате, а основной процессор выполнен с возможностью приема сигналов от вспомогательного процессора в последовательном формате.
Дисплей, входящий в состав циклового велокомпьютера, предпочтительно установлен в корпусе основного модуля, и основной процессор выполнен с возможностью выдачи на дисплей подлежащих отображению данных. Таким образом, дисплей в предложенном велокомпьютере отображает один или одновременно несколько параметров из увеличенного набора, таких как скорость, частота вращения педалей, установленная передача, время, километраж и физиологические показатели велосипедиста.
Перечень чертежей:
фиг.1 - вид спереди основного модуля обычного циклового велокомпьютера;
фиг.2 - вид сзади основного модуля обычного циклового велокомпьютера по фиг.1;
фиг.3 - вид сбоку, показывающий положение основного модуля по фиг.1 при установке на держателе;
фиг.4 - вид в перспективе, показывающий соединение держателя по фиг.3 с двумя датчиками;
фиг.5 - вид сбоку, иллюстрирующий установку датчика скорости колеса и магнита на колесе;
фиг.6 - вид в перспективе, иллюстрирующий установку датчика частоты вращения педалей и магнит на педали;
фиг.7 - вид в разрезе, иллюстрирующий водонепроницаемую установку металлических контактов основного модуля;
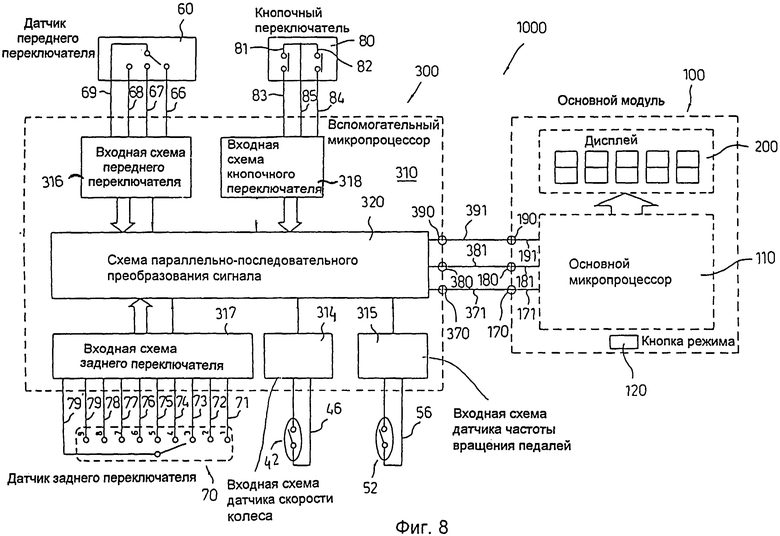
фиг.8 - структурная схема циклового велокомпьютера согласно первому варианту исполнения;
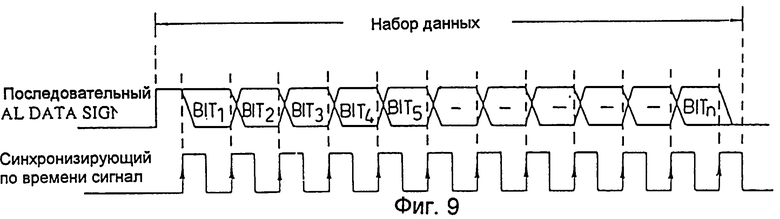
фиг.9 - цикловая диаграмма, представляющая последовательный сигнал, соответствующий входным сигналам, и синхронизирующий сигнал;
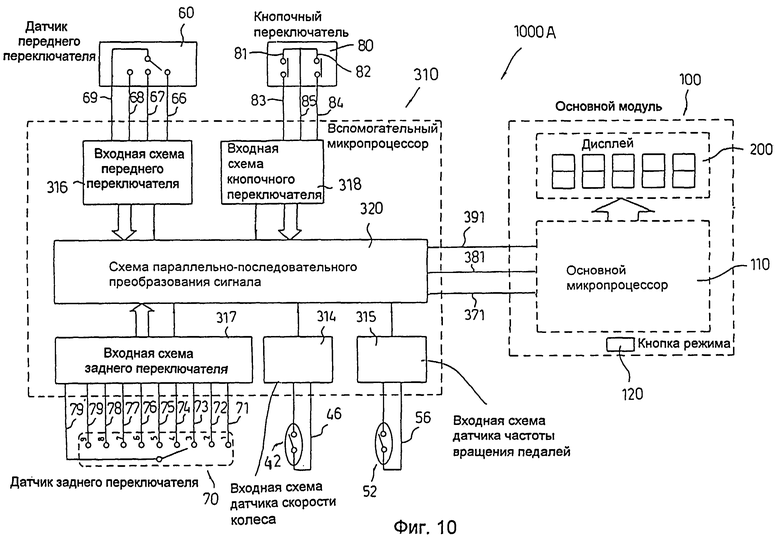
фиг.10 - структурная схема циклового велокомпьютера согласно второму варианту исполнения;
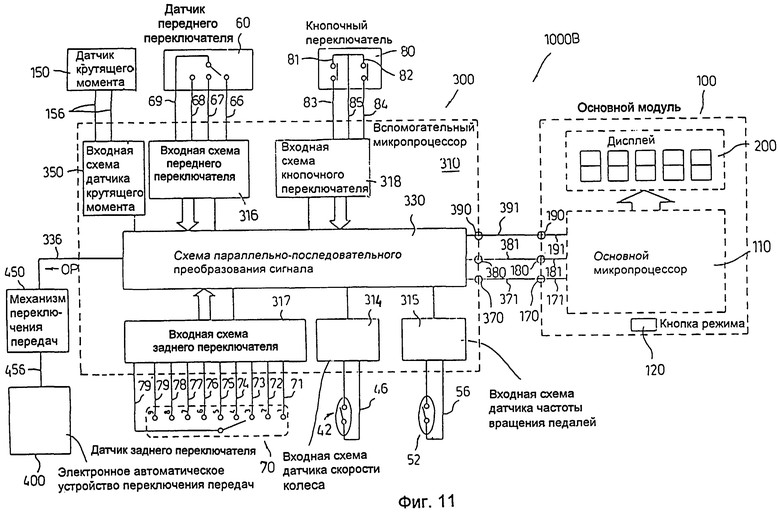
фиг.11 - структурная схема циклового велокомпьютера согласно третьему варианту исполнения;
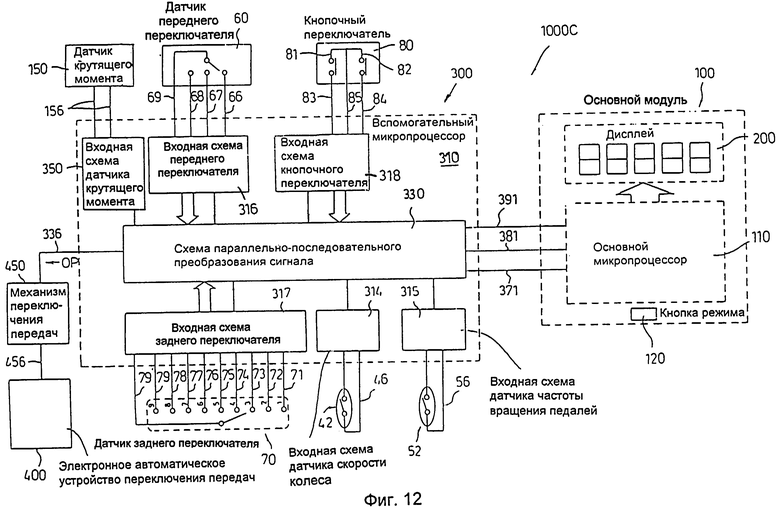
фиг.12 - структурная схема циклового велокомпьютера согласно четвертому варианту исполнения.
Сведения, подтверждающие возможность осуществления изобретения
На фиг.8 показана структурная схема циклового велокомпьютера согласно первому варианту исполнения. Цикловой велокомпьютер 1000 включает корпус 10 основного модуля 100 (подобный корпусу известного велокомпьютера - см. фиг.1, 2) и держатель 300. Как и в известных велокомпьютерах, корпус 10 основного модуля 100 съемно устанавливается на держателе 300, как это было описано со ссылкой на фиг.3. Подобно известному основному модулю по фиг.1 и 2 корпус 10 основного модуля содержит основной процессор 110 и дисплей 200 для отображения различных сигналов (или данных), которые обрабатывает и выдает на дисплей основной процессор 110. Дополнительно на передней поверхности корпуса 10 основного модуля 100 предусмотрена кнопка 120 для выбора различных режимов представления сигналов. На задней стороне корпуса 10 основного модуля 100 имеются первый, второй и третий входные металлические контакты 190, 180 и 170 соответственно, подсоединенные к основному процессору 110 соответственно электрическими линиями 191, 181 и 171. Третий входной контакт 170 служит контактом заземления; первый и второй контакты 190, 180 предназначены для передачи основному процессору 110 соответственно сигналов, соответствующих контролируемым данным от датчиков в последовательном формате, и синхронизирующего сигнала (как это будет подробно описано далее). Для каждого из входных контактов 170, 180 и 190 предусмотрена водонепроницаемая установка, подобная показанной на фиг.7.
Держатель 300 имеет в основном такое же исполнение, как и известный держатель 30 по фиг.3 и 4. Однако в соответствии с изобретением в держатель 300 встроен вспомогательный процессор 310. На держателе 300 предусмотрены первый, второй и третий выходные контакты 390, 380 и 370 соответственно, и когда корпус 10 основного модуля установлен на держателе 300, контакты 170, 180 и 190 корпуса 10 основного модуля замыкаются соответственно с контактами 370, 380 и 390 на держателе. Контакты 370, 380 и 390 соединены линиями 371, 381 и 391 передачи сигналов с тремя выходами однонаправленной схемы 320 параллельно-последовательного преобразования сигнала во вспомогательном процессоре 310 (как это будет подробно описано далее). Третий выходной контакт 370 служит контактом заземления схемы 320 вспомогательного процессора 310. Первый и второй выходные контакты 390, 380 служат соответственно для приема от схемы 320 вспомогательного процессора 310 сигналов в последовательном формате и синхронизирующего сигнала.
Как показано на фиг.8, в дополнение к схеме 320 параллельно-последовательного преобразования сигнала вспомогательный процессор 310 содержит следующие входные контуры (схемы): контур 314 сигнала датчика скорости колеса, контур 315 сигнала датчика частоты вращения педалей, контур 316 сигнала датчика положения переднего переключателя, контур 317 сигнала датчика положения заднего переключателя и контур 318 сигнала от кнопок 81, 82. Выходные сигналы от этих контуров 314, 315, 316, 317 и 318 передаются в схему 320 параллельно-последовательного преобразования сигнала.
Датчик 42 скорости колеса, установленный в соответствии с фиг.5, соединен с контуром 314 сигнала датчика скорости колеса двумя линиями 46 передачи сигналов, а датчик частоты вращения педалей 52, установленный в соответствии с фиг.6, соединен с контуром 315 сигнала датчика частоты вращения педалей двумя линиями 56 передачи сигналов.
Датчик 60 положения переднего переключателя, установленный у одного конца рулевой поперечины велосипеда, является трехпозиционным поворотным переключателем, который соединен с контуром 316 сигнала датчика положения переднего переключателя тремя линиями 66, 67 и 68 передачи сигналов и проводом 69 заземления. Датчик 60 положения переднего переключателя входит в состав переднего переключателя (не показан) с тем, чтобы определять, в каком положении находится данный переключатель, и передавать воспринятый сигнал в контур 316.
Датчик 70 положения заднего переключателя, установленный у другого конца рулевой поперечины велосипеда, является девятипозиционным поворотным переключателем, который соединен с контуром 317 сигнала датчика положения заднего переключателя девятью линиями 71-79 передачи сигналов и проводом 79' заземления. Датчик 70 определяет, в каком положении находится задний переключатель, и передает воспринятый сигнал в контур 317.
Многопозиционные поворотные переключатели передач и связанные с ними датчики положения таких переключателей типа вышеупомянутых датчиков 60, 70 положения переднего и заднего переключателей подробно описаны, например, в патенте США № 6216078 и в патентных документах, упомянутых в данном патенте.
Кнопочный переключатель 80, размещенный вблизи одного конца рулевой поперечины велосипеда, имеет две кнопки 81 и 82 дистанционного переключения. Первая кнопка 81 предназначена для выбора режима представления сигналов на дисплее 200, а вторая кнопка 82 является кнопкой включения/выключения для включения или выключения основного модуля 100 велокомпьютера. Кнопочный переключатель 80 соединен с контуром 318 двумя линиями 83 и 84 и проводом заземления 85.
Цикловой велокомпьютер, включающий описанные выше структурные части, работает следующим образом.
Когда корпус 10 основного модуля устанавливают на держателе 300, входные контакты 170, 180 и 190 на его задней поверхности замыкаются соответственно с выходными контактами 370, 380 и 390 на держателе 300 и таким образом устанавливается электрическая связь между основным процессором 110 в основном модуле 100 и встроенным в держатель 300 вспомогательным процессором 310.
Когда велосипедист едет на велосипеде, оборудованном цикловым велокомпьютером в соответствии с изобретением, данные о скорости колеса воспринимаются датчиком 42 скорости колеса и передаются по линиям 46 в контур 314 сигнала датчика скорости колеса и затем в параллельном формате - в однонаправленную схему 320 параллельно-последовательного преобразования сигнала. Таким же образом данные о частоте вращения педалей воспринимаются датчиком 52, передаются по линиям 56 в контур 315 сигнала датчика частоты вращения педалей и затем в параллельном формате - в однонаправленную схему 320 параллельно-последовательного преобразования сигнала.
В дополнение к этому сигнал о положении переднего переключателя (т.е. об установленной передаче), формируемый датчиком 60 положения переднего переключателя, передается в контур 316 сигнала положения переднего переключателя и далее в параллельном формате - в схему 320 параллельно-последовательного преобразования. Таким же образом сигнал о положении заднего переключателя, формируемый датчиком 70 положения заднего переключателя, передается в контур 317 сигнала заднего переключателя и далее в параллельном формате - в схему 320 параллельно-последовательного преобразования сигнала.
Если включена (нажата) кнопка 81, сигнал выбора режима от этой кнопки через кнопочный переключатель 80 передается в контур 318 сигнала кнопочного переключателя и затем в схему 320 параллельно-последовательного преобразования.
Если же включена кнопка 82, от этой кнопки в контур 318 сигнала и далее в схему 320 подается сигнал включения или выключения.
Таким образом, однонаправленная схема 320 параллельно-последовательного преобразования сигнала получает контролируемые данные (входные сигналы) в параллельном формате от датчика 42 скорости колеса, датчика 52 частоты вращения педалей, датчика 60 положения переднего переключателя, датчика 70 положения заднего переключателя и кнопочного переключателя 80 и преобразует сигналы, получаемые в параллельном формате, в сигналы в последовательном формате путем параллельно-последовательного преобразования сигналов. Полученные после преобразования сигналы в последовательном формате передаются от вспомогательного процессора 310 в основной процессор 110 только через первую электрическую линию 391, установленный на держателе 300 первый выходной контакт 390 и первый входной контакт 190, установленный в корпусе 10 основного модуля. Одновременно однонаправленная схема 320 параллельно-последовательного преобразования сигнала во вспомогательном процессоре 310 генерирует синхронизирующий сигнал, который передается в основной процессор 110 только через вторую электрическую линию 381, установленный на держателе 300 второй выходной контакт 380 и второй входной контакт 180, установленный в корпусе 10 основного модуля.
На фиг.9 представлены сигналы, передаваемые от схемы 320 параллельно-последовательного преобразования вспомогательного процессора 310 в основной процессор 110. Последовательный сигнал содержит набор сигналов, включая, например:
сигнал ВIТ1, представляющий скорость колеса в соответствии с сигналами (данными) датчика 42,
сигнал BIT2, представляющий частоту вращения педалей в соответствии с сигналами (данными) датчика 52,
сигнал BIT3, представляющий сигналы управления от кнопочного переключателя 80 в зависимости от положения кнопок 81, 82,
сигнал BIT4, представляющий данные о положении переднего переключателя, поступающие от датчика 60,
сигнал BIT5, представляющий данные о положении заднего переключателя от датчика 70, и так далее.
Основной процессор 110 осуществляет идентификацию, подсчет, вычисления и другие операции обработки получаемых сигналов, представленных на фиг.9, и выводит на дисплей 200 основного модуля 100 затребованные велосипедистом обработанные сигналы (данные). На дисплее 200 могут быть представлены одновременно два или более видов сигналов.
Таким образом, сигналы от датчиков 42, 52, 60, 70 и кнопок 81, 82 до своего поступления в основной процессор 110 в основном модуле 100 преобразуются в сигналы в последовательном формате однонаправленной схемой 320 во вспомогательном процессоре 310, который встроен в держатель 300. Благодаря этому, независимо от используемого количества датчиков, требуются всего три пары контактов, чтобы осуществить электрическое соединение между держателем и основным модулем 100, а именно пара контактов 390 и 190 для передачи сигналов от всех датчиков в последовательном формате, пара контактов 380 и 180 для передачи синхронизирующего сигнала и пара контактов 370 и 170 для подсоединения к проводу заземления. Другими словами, корпус 10 основного модуля 100 оснащается всего тремя металлическими входными контактами 170, 180 и 190. В результате цикловой велокомпьютер в соответствии с описанным вариантом выполнения изобретения в сравнении с обычным цикловым велокомпьютером способен содержать больше датчиков и, соответственно, выдает больше сигналов без увеличения числа контактов на задней стороне корпуса 10 основного модуля 100. Благодаря этому конструкция основного модуля остается простой и компактной при любом количестве датчиков.
Благодаря тому, что на руле велосипеда дополнительно предусмотрен вышеупомянутый отдельный кнопочный переключатель 80, подсоединенный к вспомогательному процессору, велосипедист может выбрать режим представления сигналов на дисплее, не убирая руки с руля велосипеда.
На фиг.10 представлена структурная схема циклового велокомпьютера в соответствии со вторым вариантом исполнения изобретения. Цикловой велокомпьютер 1000А по фиг.10 отличается от циклового велокомпьютера 1000 по фиг.8 тем, что в этом варианте исполнения не используется держатель 300, в который был встроен вспомогательный процессор по первому варианту исполнения. В данном исполнении корпус 10 основного модуля установлен непосредственно на рулевой поперечине, а вспомогательный процессор 310 встроен в подходящую для этого часть велосипеда. Перечисленные выше датчики, включая датчик 42 скорости колеса, датчик 52 частоты вращения педалей, датчик 60 положения переднего переключателя, датчик 70 положения заднего переключателя и кнопочный переключатель 80 подсоединены к вспомогательному процессору 310 соответствующими линиями 46, 56, 66-69, 71-79' и 83-85 передачи сигналов, как это было описано для первого варианта исполнения. Далее вспомогательный процессор 310 подсоединен к основному процессору 110 тремя линиями 371, 381 и 391 передачи сигналов. Аналогичным образом сигналы, представленные на фиг.9, передаются от однонаправленной схемы 320 параллельно-последовательного преобразования сигнала во вспомогательном процессоре 310 в корпус 10 основного модуля 100 для обработки и представления обработанных сигналов на дисплее 200 в соответствии с режимом представления по выбору велосипедиста.
В последнее время разработаны электронные автоматические устройства переключения передач. В таком устройстве используется датчик крутящего момента для определения крутящего момента на валу, а процессор используется для определения того, не превышает ли замеренный крутящий момент предварительно заданной величины. Если превышение имеет место, это означает, что крутящий момент на валу слишком высок, и, следовательно, желательно повысить передачу, чтобы снизить нагрузку велосипедиста. Соответственно, сигнал управления на увеличение передачи выдается процессором и передается на электронное автоматическое устройство переключения передач для выполнения операции переключения на повышенную передачу. С другой стороны, если замеренный крутящий момент ниже предварительно заданной величины, желательно понижение передачи. Аналогичным образом второй сигнал управления передается от процессора на электронное автоматическое устройство переключения передач для выполнения операции переключения на пониженную передачу.
Упомянутое электронное автоматическое устройство переключения передач уже применяется на практике, и процессор такого устройства может быть интегрирован с основным процессором в основном модуле циклового велокомпьютера в соответствии с изобретением.
На фиг.11 представлена структурная схема циклового велокомпьютера в соответствии с третьим вариантом осуществления изобретения. В дополнение к датчикам, описанным в первом исполнении, цикловой велокомпьютер 1000В по данному варианту дополнительно содержит датчик 150 крутящего момента, передаваемого на педальный вал. Воспринятый сигнал передается от датчика 150 по линиям 156 в контур 350 сигнала датчика крутящего момента и далее в двунаправленную схему 330 параллельно-последовательного преобразования сигнала во вспомогательном процессоре 310, встроенном в держатель 300. Сигнал от датчика 150 крутящего момента преобразуется вместе с сигналами от других датчиков (42, 52, 60, 70) в последовательный сигнал, который передается от схемы 330 параллельно-последовательного преобразования сигнала вспомогательного процессора 310 в основной процессор 110 в основном модуле 100 только через первый выходной контакт 390 на держателе 300. По сигналу, полученному от датчика 150 крутящего момента, основной процессор 110 определяет, не выходит ли величина передаваемого на вал крутящего момента за заданные пределы. Если определено, что крутящий момент выше предварительно заданной величины, т.е. он слишком велик, желательно повышение передачи. Соответственно сигнал управления выводится от основного процессора 110 и передается во вспомогательный процессор 310. В результате процессор 310 вырабатывает команду управления "ОР" на повышение передачи. Данная команда передается через соответствующий контакт для выведения управляющего сигнала по линии 336 на механизм 450 переключения передач и по линии 456 на электронное автоматическое устройство 400 переключения передач для выполнения операции переключения на повышенную передачу. С другой стороны, если крутящий момент ниже предварительно заданной величины, это означает, что желательно понижение передачи. Соответственно, основной процессор 110 вырабатывает сигнал управления на понижение передачи, и этот сигнал передается на механизм 450 переключения передач электронного автоматического устройства 400 переключения передач для выполнения операции переключения на пониженную передачу.
В данном случае выходной сигнал управления на повышение или понижение передачи от основного процессора 110 может передаваться во вспомогательный процессор 310 предпочтительно только через указанный первый контакт, образованный замыканием контактов 390 и 190 и только через существующие линии 191 и 391 передачи сигналов.
Цикловой велокомпьютер 1000В согласно третьему варианту исполнения изобретения может иметь общий процессор с электронным автоматическим устройством переключения передач, что увеличивает функциональные возможности циклового велокомпьютера.
На фиг.12 представлена структурная схема циклового велокомпьютера в соответствии с четвертым вариантом исполнения изобретения. Цикловой велокомпьютер 1000С по фиг.12 отличается от циклового велокомпьютера 1000В по фиг.11 тем, что в этом варианте исполнения не используется держатель 300. В данном исполнении корпус 10 основного модуля установлен непосредственно на рулевой поперечине, а вспомогательный процессор 310 встроен в подходящую для этого часть велосипеда. Перечисленные выше датчики, включая датчик 42 скорости колеса, датчик 52 частоты вращения педалей, датчик 60 положения переднего переключателя, датчик 70 положения заднего переключателя и датчик 150 крутящего момента, а также кнопочный переключатель 80 подсоединены к вспомогательному процессору 310 соответствующими линиями 46, 56, 66-69, 71-79', 156 и 83-85 передачи сигналов, как это было описано для третьего варианта исполнения. Далее вспомогательный процессор 310 подсоединен к основному процессору 110 только тремя линиями 371, 381 и 391 передачи сигналов и выполняет те же функции, что и в описанном третьем варианте.
Хотя в описанных выше четырех вариантах исполнения не включены датчики для определения физиологических показателей велосипедиста и датчики характеристик окружающей среды, таких как температура и давление, на основании приведенной в описании общей концепции специалистам в данной области будет понятно, как произвести дополнение системы указанными и другими датчиками.
Настоящее изобретение подробно описано применительно к четырем вариантам исполнения, однако, оно не ограничивается показанными вариантами и может включать различные варианты, модификации и усовершенствования, очевидные для специалистов в данной области и не выходящие за сферу действия заявленного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСПЛЕЯ | 1991 |
|
RU2119187C1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ ПЕРЕДАЧ ДЛЯ ВЕЛОСИПЕДА | 2001 |
|
RU2253589C2 |
| Комплекс модульного оборудования электрохимической защиты подземных и стальных сооружений от коррозии со встроенной системой коррозионного мониторинга | 2021 |
|
RU2782191C1 |
| ИНЪЕКЦИОННАЯ СИСТЕМА ДЛЯ САМОСТОЯТЕЛЬНЫХ ИНЪЕКЦИЙ | 2008 |
|
RU2471514C2 |
| ИСПАРИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБ ЕГО ФУНКЦИОНИРОВАНИЯ | 2019 |
|
RU2790191C2 |
| РАДИОТЕЛЕФОННАЯ СИСТЕМА ДЛЯ ГРУПП УДАЛЕННЫХ АБОНЕНТОВ | 1994 |
|
RU2246185C2 |
| АВТОПИЛОТ | 2013 |
|
RU2619675C2 |
| СПОСОБ ПЕРЕДАЧИ КОДИРОВАННОЙ ОТРАЖЕННОЙ ИНФОРМАЦИИ О НАХОЖДЕНИИ РЫБЫ, ПЕРЕДАЮЩАЯ СИСТЕМА ДЛЯ ДИСТАНЦИОННО УДАЛЕННОГО РАДИОПЕЛЕНГАТОРА И ПЕРЕДАЮЩАЯ СИСТЕМА КОДИРОВАНИЯ И ПЕРЕДАЧИ ИНФОРМАЦИИ | 1991 |
|
RU2107307C1 |
| СКЛАДНОЕ ЭЛЕКТРОННОЕ УСТРОЙСТВО И СПОСОБ ЕГО РАБОТЫ | 2020 |
|
RU2805456C2 |
| СИСТЕМЫ И СПОСОБЫ ПОЖАРОТУШЕНИЯ | 2013 |
|
RU2673623C2 |
Изобретение относится к устройствам получения, обработки и выдачи на дисплей контролируемых данных в процессе движения велосипеда. Техническим результатом является обеспечение возможности велокомпьютеру получать сигналы от большего количества датчиков без увеличения количества контактов на корпусе основного модуля. Для этого велокомпьютер содержит основной процессор, вспомогательный процессор, корпус основного модуля, дисплей, при этом вспомогательный процессор выполнен с возможностью приема в параллельном формате контролируемых данных от множества датчиков и выдачи в последовательном формате сигналов на основной процессор. 3 н. и 23 з.п. ф-лы, 12 ил.
| US 5335188 А, 02.08.1994 | |||
| RU 94027510 A1 20.05.1996 | |||
| УСТРОЙСТВО ДЛЯ СБОРА, ОБРАБОТКИ И ПАКЕТНОЙ ПЕРЕДАЧИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ФИЗИЧЕСКОЙ СРЕДЫ | 1994 |
|
RU2080653C1 |
| US 5357177 А, 18.10.1994 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО | 1992 |
|
RU2011563C1 |
| Многопроцессорная система | 1988 |
|
SU1522228A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФИЗИЧЕСКОЙ РАБОТОСПОСОБНОСТИ И ТОЛЕРАНТНОСТИ К ФИЗИЧЕСКОЙ НАГРУЗКЕ | 1991 |
|
RU2012221C1 |

