Область техники, к которой относится изобретение
Настоящая заявка относится к системам управления полетом и, более конкретно, к автопилоту винтокрылого летательного аппарата и соответствующим способам.
Уровень техники
Вертолет, по своей сути, является нестабильным и, в общем, требует, чтобы пилот поддерживал постоянное взаимодействие с управлением циклическим шагом, используя одну руку. Даже мгновенный выпуск управления циклическим шагом может привести к "переворачиванию" управления циклическим шагом или рычага управления, в результате чего, происходит потеря управления вертолетом. Это особенно неудобно, когда пилот должен вмешиваться в действия, выполняемые без использования рук, такие как, например, регулировка головной гарнитуры или сверка с бумажной картой. Кроме того, необходимость постоянного управления циклическим шагом может привести к усталости пилота.
Традиционные автопилоты могут обеспечить преимущества, которые включают в себя обеспечение возможности для пилота не выполнять управление циклическим шагом для вмешательства в задачи, выполняемые без использования рук, а также для снижения усталости пилота. Заявители, однако, понимают, что стоимость традиционного автопилота вертолета может стать препятствием. Например, стоимость может быть настолько существенной, по сравнению со стоимостью самого вертолета, что автопилоты редко используются на легких вертолетах.
Представленные выше примеры предшествующего уровня техники и ограничений, относящихся, к ним, предназначены для иллюстрации, а не для исключения. Другие ограничения предшествующего уровня техники будут понятны для специалиста в данной области техники после чтения описания и изучения чертежей.
Раскрытие изобретения
Следующие варианты осуществления и их аспекты описаны и представлены совместно с системами, инструментами и способами, которые считаются примерными и иллюстративными, а не ограничивающими объем. В различных вариантах осуществления, одна или больше из упомянутых выше проблем были рассмотрены для их уменьшения или устранения, в то время как другие варианты осуществления направлены на другие улучшения.
В общем, описаны система автопилота для вертолета, соответствующие компоненты и способы. В одном аспекте раскрытия внутренний контур выполнен, по меньшей мере, для предоставления истинного пространственного положения вертолета, включающей в себя заданный уровень избыточности, примененный во внутреннем контуре. Внешний контур автопилота выполнен с возможностью предоставления, по меньшей мере, одной функции навигации для полета вертолета, включающей в себя другой уровень избыточности, чем внутренний контур.
В другом аспекте раскрытия компоновка элемента привода формирует часть автопилота для обеспечения автоматического управления вертолетом путем активации одного или больше элементов управления полетом вертолета. По меньшей мере, один электродвигатель включает в себя выходной вал и компоновку обмотки электродвигателя для подачи тока возбуждения, что приводит к вращению выходного вала. Соединение элемента привода функционально соединено между выходным валом электродвигателя и элементами управления полетом таким образом, что вращение выходного вала приводит к соответствующему движению соединения элемента привода и элементов управления полетом. Компоновка возбуждения электродвигателя во время работы обеспечивает ток возбуждения от источника питания во время работы автопилота и, по меньшей мере, обеспечивает соединение накоротко компоновки обмотки электродвигателя в связи с отказом источника питания таким образом, что электродвигатель формирует силу торможения, приложенную к соединению элемента привода, которая используется для стабилизации полета вертолета во время отказа питания.
В еще другом аспекте настоящего раскрытия описаны вариант осуществления системы автопилота и соответствующий способ для вертолета, который включает в себя модуль GPS, который обеспечивает выходные данные GPS. Компоновка датчика предназначена для автопилота и формирует выходные сигналы набора датчиков, для представления характеристики полета вертолета. Компоновка управления принимает выходные сигналы GPS и выходные сигналы датчиков, и генерирует сигналы электрического возбуждения в ответ на это. Элемент привода выполнен электромеханическим и принимает сигналы электрического возбуждения для генерирования выходных воздействий механического управления, в ответ на это, которые механически соединены с вертолетом для обеспечения автоматического управления полетом вертолета, без необходимости использования гидравлической системы вертолета.
В еще одном, другом аспекте настоящего раскрытия система автопилота и соответствующий способ описаны для вертолета, который включает в себя вспомогательную гидравлическую систему, которая принимает входные сигналы управления полетом от пилота и, в свою очередь, формирует механические выходные воздействия, которые механически соединены с вертолетом для обеспечения для пилота возможности управления вертолетом. Компоновка датчиков формирует выходные сигналы набора датчиков, которые характеризуют полет вертолета. Компоновка управления принимает выходные сигналы датчиков и генерирует электрические сигналы возбуждения. Компоновка возбуждения выполнена электромеханической и принимает электрические сигналы возбуждения для генерирования выходных воздействий управления, в ответ на это, которые механически соединены со вспомогательной гидравлической системой, и выполнены с возможностью взаимодействия с компоновкой управления для обеспечения автоматического управления полетом вертолета в первом, штатном режиме, когда вспомогательная гидравлическая система имеет нормальное рабочее состояние, и во втором режиме отказа, когда вспомогательная гидравлическая система имеет рабочий статус отказа, для обеспечения автоматического управления полетом вертолета в каждом из штатного режима и режима отказа.
В продолжающемся аспекте настоящего раскрытия система управления полетом и соответствующий способ описаны для избирательного автоматического управления горизонтальным полетом вертолета, причем такой горизонтальный полет отличается набором параметров ориентации, включая в себя ориентацию тангажа, ориентацию крена и ориентацию рысканья. В вариантах осуществления трехосевой датчик скорости MEMS установлен на вертолете для генерирования сигнала скорости тангажа, сигнала скорости крена и сигнала скорости рысканья, которые представляют изменения упомянутой ориентации крена, ориентации тангажа и ориентации рысканья, соответственно. Трехосевой акселерометр MEMS генерирует сигналы акселерометра, отвечающие за горизонтальный полет. Приемник GPS установлен на вертолете для генерирования сигнала курса и сигнала скорости, в соответствии с нормальным полетом вертолета. Трехосевой магнитометр генерирует сигналы магнитометра. Контроллер принимает набор входных сигналов, состоящих из сигнала скорости тангажа, сигнала скорости крена, сигнала скорости рысканья, сигналов акселерометра, сигнала курса, сигналов магнитометра и сигнала скорости для определения истинного пространственного положения вертолета и генерирования набора сигналов управления, для поддержания стабильной ориентации при горизонтальном полете вертолета, в соответствии с выбранным курсом, определенным на земле, и при выбранной скорости. Компоновка элемента привода принимает набор сигналов управления для регулирования горизонтального полета вертолета на основе набора сигналов управления. В одном варианте осуществления сигнал скорости может быть предоставлен GPS. В другом варианте осуществления сигнал скорости может быть предоставлен датчиком скорости воздуха летательного аппарата.
В дополнительном аспекте настоящего раскрытия система управления полетом и соответствующий способ описаны для избирательного автоматического управления горизонтальным полетом вертолета, причем такой горизонтальный полет отличается набором параметров ориентации, включая в себя ориентацию тангажа, ориентацию крена и ориентацию курса. В вариантах осуществления трехосевой датчик скорости MEMS установлен на вертолете для генерирования сигнала скорости крена, сигнала скорости тангажа и сигнала скорости рысканья, которые отвечают на изменения упомянутой ориентации крена, ориентации тангажа и ориентации рыскания, соответственно. Трехосевой акселерометр MEMS генерирует сигналы акселерометра, соответствующие горизонтальному полету. Приемник GPS установлен в вертолете для генерирования сигнала курса, сигнала высоты и сигнала скорости, в соответствии с горизонтальным полетом вертолета. Трехосевой магнитометр генерирует сигналы направления магнитометра. Контроллер установлен на вертолете для приема набора входных сигналов, состоящих из сигнала скорости тангажа, сигнала скорости крена, сигнала скорости рыскания, сигнала ускорения, сигнала курса, сигнала высоты, сигналов направления магнитометра и сигнала скорости для определения истинного пространственного положения вертолета и генерирования набора сигналов управления, для поддержания стабильной ориентации при горизонтальном полете вертолета, в соответствии с выбранным курсом, определенным на земле, и выбранной высотой для выбранного курса. Компоновка элемента привода принимает набор сигналов управления для регулировки горизонтального полета вертолета на основе набора сигналов управления. В одном варианте осуществления сигнал скорости и/или сигнал высоты могут быть предоставлены GPS. В другом варианте осуществления соответствующие одни из сигнала скорости и/или сигнала высоты могут быть предусмотрены датчиком скорости воздуха воздушного летательного аппарата и/или датчиком высоты на основе давления.
В другом аспекте настоящего раскрытия система управления полетом и соответствующий способ описаны для избирательного автоматического управления полетом вертолета, который выполнен с возможностью летать с зависанием, причем зависание отличается набором параметров ориентации, включающим в себя ориентацию тангажа, ориентацию крена, ориентацию рыскания и положение над землей. В вариантах осуществления компоновка датчиков MEMS установлена на вертолете для генерирования сигнала скорости тангажа, который отвечает на изменения в упомянутой ориентации тангажа, сигнала скорости крена, который соответствует изменениям в ориентации крена, сигнала скорости рыскания, который соответствует упомянутой ориентации рыскания, и сигнала ускорения, который соответствует зависанию. Магнитометр генерирует сигнал магнитного направления. Приемник GPS установлен на вертолете для генерирования сигнала положения, сигнала скорости и сигнала курса, в соответствии с зависанием вертолета. Компоновка обработки установлена на вертолете, для приема набора входных сигналов, состоящих из сигнала скорости тангажа, сигнала скорости крена, сигнала скорости рыскания, сигналов ускорения, сигнала положения, сигнала скорости, сигнала курса и сигнала магнитного направления, для определения истинного пространственного положения вертолета и для генерирования набора сигналов управления, для поддержания стабильного зависания вертолета, в соответствии с выбранным положением зависания. Компоновка элементов привода предназначена для приема набора сигналов управления, для регулирования зависания вертолета на основе сигналов управления. В варианте осуществления сигнал датчика летательного аппарата, работающего на основе давления или сигнал высоты на основе GPS можно использовать для обозначения текущего смещения от требуемой высоты.
В еще одном, другом аспекте настоящего раскрытия система автопилота и соответствующий способ описаны для вертолета. Внутренний контур выполнен, по меньшей мере, для предоставления истинной высоты полета вертолета, в соответствии с заданным уровнем избыточности, приложенной к внутреннему контуру. Внешний контур автопилота выполнен с возможностью предоставления, по меньшей мере, одной функции навигации в отношении полета вертолета, и в котором внутренний контур и внешний контур каждый выполнен с использованием тройных процессоров.
Краткое описание чертежей
Примерные варианты осуществления иллюстрируются на ссылочных фиг. чертежей. Предполагается, что варианты осуществления и фиг., раскрытые здесь, являются, скорее, иллюстративными, чем ограничительными.
На фиг. 1 схематично показан вид в перспективе части вертолета, включающей в себя компоненты автопилота, в соответствии с настоящим раскрытием.
На фиг. 2 схематично показан вид сверху в перспективе части вертолета по фиг. 1, представленной здесь для дополнительной иллюстрации деталей компонентов системы автопилота.
На фиг. 3 схематично показан вид в перспективе с разрезом части варианта осуществления элемента привода и варианта осуществления соединения с ограничением силы, которые могут использоваться, как компоненты автопилота настоящего раскрытия.
На фиг. 4 схематично показан вид в перспективе варианта осуществления компоновки привода с зубчатой передачей, которая может формировать часть элемента привода по фиг. 3 вместе с парой резервирующих друг друга электродвигателей привода элемента привода.
На фиг. 5 показана блок-схема, которая иллюстрирует вариант осуществления автопилота, в соответствии с настоящим раскрытием.
На фиг. 6 показана схема варианта осуществления блока голосования, который принимает голоса, подаваемые набором тройных процессоров.
На фиг. 7 показана блок-схема последовательности операций, которая иллюстрирует вариант осуществления способа для работы внутреннего контура управления и внешнего контура управления автопилота, в соответствии с настоящим раскрытием.
На фиг. 8 показана схема варианта осуществления системы динамического торможения, которая может формировать часть автопилота, в соответствии с настоящим раскрытием.
На фиг. 9 показана схема другого варианта осуществления системы динамического торможения, которая может формировать часть автопилота, в соответствии с настоящим раскрытием.
На фиг. 10 показана блок-схема другого варианта осуществления автопилота, в соответствии с настоящим раскрытием, включающая в себя конструктивную конфигурацию, функционирующую при отказе, в которой используется тройная архитектура, как во внутреннем, так и во внешнем контурах.
На фиг. 11 показана таблица, которая иллюстрирует режимы полета автопилота с точки зрения различных входных сигналов датчика, которые используются с целью управления.
Осуществление изобретения
Следующее описание предназначено для обеспечения для специалиста в данной области техники возможности использовать изобретение и предоставлено в контексте патентной заявки и ее требований. Различные модификации описанных вариантов осуществления будут понятны для специалиста в данной области техники, и общие принципы, описанные здесь, могут применяться в других вариантах осуществления. Таким образом, настоящее изобретение не предназначено для его ограничения представленными вариантами осуществления, но должно соответствовать самому широкому объему, который соответствует принципам и свойствам, описанным здесь, включающим в себя модификации и эквиваленты. Следует отметить, что чертежи могут быть вычерчены не в масштабе и могут быть схематичными по своей сути, таким образом, чтобы можно было лучше иллюстрировать представляющие интерес свойства. Описательная терминология может использоваться с целью улучшения понимания читателя в отношении различных видов, представленных на чертежах, и при этом, никоим образом, не предполагается, что она является ограничительной.
На фиг. 1 показан частичный вид в перспективе вертолета 10, представленный здесь с целью иллюстрации различных компонентов варианта осуществления системы 12 автопилота для отношении вертолета. Следует понимать, что большая часть физической структуры самого вертолета не видима на фиг. 1 с целью ясности представления, однако, следует понимать, что эта структура присутствует. Автопилот в настоящем раскрытии является электромеханическим и может обеспечивать управление полетом вертолета, без необходимости использования гидравлической системы управления полетом. Вертолет может, в качестве неограничительного примера, представлять собой вертолет Robinson R22. Однако представленное здесь описание может быть легко адаптировано для использования с любым соответствующим вертолетом, доступным в настоящее время, или который будет разработан в будущем. Например, автопилот, в соответствии с настоящим раскрытием, может использоваться с вертолетами, имеющими гидравлическую вспомогательную систему управления циклическим шагом при работающей или не работающей гидравлической системе.
Вертолет 10 включает в себя ручку или рычаг 14 управления циклическим шагом, имеющий ручку управления или захват 18, который выполнен с возможностью его захвата рукой пилота. Как будет понятно для специалиста в данной области техники, рычаг 14 может перемещаться от вперед и назад (в направлении к инструментальной консоли 20 и от нее), для управления тангажом вертолета и в поперечном направлении с целью управления креном вертолета скоординированным образом, для обеспечения управляемого полета. Дополнительные входные элементы управления предусмотрены для пилота через пару педалей для управления рысканьем вертолета, путем изменения шага хвостового винта. Следует отметить, что такие элементы системы управления рысканьем не были представлены с целью ясности иллюстрации, но следует понимать, что они присутствуют. В варианте осуществления пилот также сохраняет управление всем вертолетом, а также установками дроссельных заслонок. Автопилот, в соответствии с настоящим раскрытием, однако, может осуществлять полное управление рычагом 14, перемещая рычаг в любом направлении до пределов его перемещения в соответствующих обстоятельствах. Рычаг 14 проходит ниже палубы 24 вертолета и с ними соединены соединения управления тангажом и креном вертолета, как понятно для специалиста в данной области техники, с тем, чтобы управлять приводом циклического шага основного ротора вертолета. В частности, труба 25a крутящего момента передает усилие привода для управления креном, в то время как рычаг 25b управления передает усилие привода для управления тангажом. Термин "циклический" относится к изменению шага лопастей ротора вертолета в каждом обороте. В этом отношении, управление циклическим шагом может относиться к манипуляциям рычагом, или сам рычаг может называться рычагом управления циклическим шагом. Модуль 28 процессора дисплея автопилота (ADPU) может быть установлен на инструментальной консоли 20 для обеспечения показаний для пилота, а также для обеспечения возможности обработки и для других целей, как будет дополнительно описано.
Элементы управления циклическим шагом 18, в частности, включают в себя узел 26 модуля переключателя, который может быть установлен так, как показано. Детали ручки 18 представлены с дополнительным увеличением на выделенном участке. Модуль переключателя может содержать переключатели, включающие в себя переключатель 29a включения/выключения и "расположенный сверху цилиндрический" переключатель 29b балансировки/режима (4-хсторонний). Расположенный сверху цилиндрический переключатель позволяет пилоту настраивать курс, скорость, положение и высоту. Нажатие на расположенный сверху цилиндрический переключатель одновременно активирует более, чем один переключатель, позволяет выбирать выделенный режим. Процессор автопилота может иметь свойство перерыва по времени при работе, что предотвращает непрерывную регулировку в случае отказа переключателя или неисправности проводов. Переключатель режима может выбирать и может отменять выбор режимов высоты, скорости, зависания или режимов фиксации положения, на основе текущего состояния полета. Следует отметить, что с целью настоящего раскрытия режим зависания может взаимозаменяемо называться режимом удержания положения, поскольку здесь не накладываются требования, чтобы автопилот управлял совместно вертолетом и/или ножными педалями.
Также, обращаясь к фиг. 1, в автопилоте 12 воплощено управление циклическим шагом через множество составляющих узлов, которые, соответствующим образом, расположены на вертолете. Основной модуль 30 автопилота расположен под основной палубой вертолета. В настоящем варианте осуществления основной модуль 30 включает в себя кожух 31 L-образной формы, в котором установлено электронное устройство, а также соединение 32a элемента привода управления тангажом и соединение 32b элемента привода управления креном, которые могут быть обозначены в общем или совместно номером 32 ссылочной позиции. Каждое из этих соединений включает в себя элемент привода, который расположен внутри кожуха основного модуля, как будет дополнительно описано ниже. Дистальный конец каждого из соединений соединен с самым нижним концом рычага 14, для воплощения того, что известно, как система параллельного управления. В этом отношении, следует понимать, что оригинальное соединение управления циклическим шагом вертолета 10 между рычагом 14 и ротором остается без нарушений. Таким образом, управление пилота вертолетом, также как автопилотом передают непосредственно на рычаг. Детали используемые для соединения управления тангажом и креном обеспечивают параллельную компоновку входного воздействия на управление. Система управления автопилота последовательного типа, в отличие от этого, требует разрыва оригинальных соединений управления циклическим шагом вертолета между рычагом и ротором таким образом, чтобы элементы привода автопилота могли быть вставлены в разрыв. Следует понимать, что представленные здесь описания могут быть непосредственно адаптированы для варианта осуществления с последовательным подводом управляющих воздействий.
Возвращаясь к фиг. 2, компоненты вертолета и автопилота представлены в виде сверху в перспективе. На этом виде элемент 60a привода тангажа и элемент 60b привода крена (которые могут быть в общем или совместно обозначены номером 60 ссылочной позиции) можно видеть в L-образном кожухе 31, крышка кожуха которого представлена прозрачной. Электронное средство 66 основного модуля расположено внутри кожуха и электрически соединено (не показаны), как снаружи, так и с элементами привода. Следует отметить, что дополнительные детали в отношении соответствующего варианта осуществления электронного средства 66 основного модуля были описаны в совместно находящейся на рассмотрении заявке, регистрационный №13/763,574 на патент США (регистрационный № патентного поверенного HTK-2), которая представлена здесь полностью по ссылке.
На фиг. 3 показан вариант осуществления элемента 60 привода, который может использоваться для элементов привода тангажом и креном в данном раскрытии, в виде в перспективе, установленный внутри кожуха 31, и подключенный к соединению 32 управления. Каждый элемент привода включает в себя корпус 82, имеющий компоновку зубчатой передачи, которая еще будет представлена, внутри кожуха, два электродвигателя: электродвигатель A и электродвигатель B, и компоновку 84 сцепления для избирательного подключения и отключения электродвигателей для вращения выходного вала, которая не видна с противоположной стороны корпуса 82. Последний может быть сформирован, например, из нержавеющей стали. Как можно видеть, компоновка зубчатой передачи обеспечивает возможность одновременного привода электродвигателей A и B выходного вала или любого одного из электродвигателей для индивидуального привода выходного вала. В настоящем варианте осуществления электродвигатели A и B представляют собой бесщеточные электродвигатели постоянного тока, имеющие Y-образную конфигурацию статора, которая требует скоординированной подачи входных сигналов для управления фазами электродвигателей в конкретной последовательности, как хорошо известно. Таким образом, электродвигатели не могут пойти в разнос под действием своей собственной мощности. Электродвигатели включают в себя датчики с эффектом Холла, которые используются с целью синхронизации электрических импульсов привода со статором электродвигателя. Дополнительные детали в отношении электродвигателей и их соответствующие описания привода представлены ниже в одном или больше соответствующих местах. В то время как настоящее раскрытие, в качестве примера, было составлено с точки зрения использования бесщеточных электродвигателей постоянного тока, имеющих обмотку статора, включенную по схеме звезда, следует понимать, что можно использовать любой соответствующий тип электродвигателя.
На фиг. 4 иллюстрируется вариант осуществления компоновки 100 зубчатой передачи, которая может использоваться в элементе привода на фиг. 3. Прежде всего, следует отметить, что компоновка зубчатой передачи представляет собой многокаскадную понижающую передачу с коэффициентом понижения, например, приблизительно 1750:1. Кроме того, зубья не были представлены для ряда зубчатых колес, которые будут описаны ниже, но следует понимать, что они присутствуют. В других вариантах осуществления могут не требоваться зубчатые колеса с зубьями. Электродвигатели A и B имеют выходные валы, на которых установлены зубчатые колеса, которые соединены с зубчатым колесом 102 на первом валу 104. Противоположный конец вала 104 поддерживает меньшее зубчатое колесо 106, которое выполняет привод зубчатого колеса 110, который удерживается на втором валу 112, на котором также установлена меньшая зубчатая передача 114 (частично скрыта в виде на чертеже). Следует отметить, что вал 112 может содержать вал сцепления, который может перемещаться поперечно для избирательного соединения или разъединения электродвигателей привода с остающимися зубчатыми колесами зубчатой передачи. Соответствующая компоновка сцепления описана, например, в патенте США №7954614, который представлен здесь по ссылке. Компоновка сцепления основана на движении вала сцепления вдоль его удлиненной оси, используя постоянный магнит, который установлен на дистальном конце вала. Элемент 113 привода сцепления (фиг. 3) может избирательно перемещать (например, поворачивать) другой постоянный магнит относительно постоянного магнита, установленного на валу сцепления, таким образом, что вал сцепления смещается под действием магнитного поля, перемещаясь между соединенным положением и разъединенным положением. Вал сцепления остается в текущем рабочем положении, несмотря на отказ питания. Зубчатое колесо 114, в свою очередь, избирательно выполняет привод зубчатого колеса 120, которое установлено на третьем валу 122. На последний также установлено меньшее зубчатое колесо 124, которое выполняет привод зубчатого колеса 130, которое установлено на четвертном валу 132. На четвертом валу, в свою очередь, установлено меньшее зубчатое колесо 134, которое выполнено с возможностью вращения выходного зубчатого колеса 140, которое установлено на выходном валу 142 элемента привода. Выходное зубчатое колесо выполнено с возможностью обеспечения достаточного вращения для перемещения рычага 14 по его полному диапазону движения. В варианте осуществления элементы привода, в соответствии с настоящим раскрытием, выполнены достаточно надежными, с точки зрения генерируемого уровня силы привода таким образом, что они выполнены с возможностью управления циклическим шагом вертолета с гидравлической системой управления, в которой возник отказ. В настоящем варианте осуществления элемент привода выполнен с возможностью приложения крутящего момента 600 дюймов-фунтов или 50 футов-фунтов. Далее, в настоящем варианте осуществления, используя рычаг элемента привода длиной 2 дюйма, обеспечивается возможность приложения силы вплоть до 300 фунтов в нижней части системы управления циклическим шагом. В то время как настоящий вариант осуществления разработан для предоставления силы привода на этом уровне, следует понимать, что в других вариантах осуществления могут быть обеспечены значительно большая или меньшая силы, например, в результате изменения выходного крутящего момента электродвигателя, передаточного числа зубчатой передачи или длины рычага управления элемента привода. Как показано на фиг. 1 и 2, силы элемента привода прикладываются к нижней части управления циклическим шагом, в то время, как силы пилота прикладываются к верхней части рычага управления циклическим шагом. В соответствии с этим, для пилота обеспечивается механическое преимущество из-за разной длины плеча рычага. На вертолете R22 механическое преимущество, связанное с тем, что пилот находится сверху рычага управления по сравнению с нижней частью рычага управления, где закреплены элементы привода, составляет, примерно, 7:1. В таком случае приложенная элементом привода сила 100 фунтов эквивалентна приблизительно 43 фунтам приложенной пилотом силы. Аналогично, в то время как элемент привода может генерировать очень большие силы, соединение с ограничением силы, которое описано ниже, обычно, не будет воплощено для передачи через себя силы такой величины в основание рычага управления циклическим шагом, пока не будет установлено гораздо более жестким соединение с ограничением силы.
В варианте осуществления автопилот может определять, на основе входных данных датчика, состояние системы гидравлического управления вертолетом, в качестве одного из нормального режима и режима отказа. В нормальном режиме внутренний контур может генерировать сигналы управления электродвигателем элемента привода на основе первого, нормального набора параметров. В режиме отказа автопилот может генерировать сигналы управления электродвигателем элемента привода на основе второго набора параметров для отказа. В качестве параметров для отказа можно проверять любое изменение в управлении, которое было введено в результате потери вспомогательной гидравлической системы с целью циклической активации. Например, может быть обеспечена компенсация мертвой зоны или зоны гистерезиса. В качестве другого примера, компенсация может быть введена для учета для ограничения цикличности, которая может возникнуть в мертвой зоне, такой, как, например, при автоматическом возмущении. Эти наборы параметров, помимо прочих, могут быть сохранены в соответствующем запоминающем устройстве, доступ к которому осуществляют MCP, как будет описано ниже.
Подробно описанные выше механические компоненты автопилота, теперь соответствуют описанию автопилота, с точки зрения взаимного соединения между описанными выше компонентами и соответствующими электронными элементами управления. В частности на фиг. 5 показана блок-схема варианта осуществления автопилота 12. В этом отношении, основной модуль 30, содержащий ограждение 31, исполнительные элементы 60 крена и тангажа, и электронное устройство 66 могут упоминаться ниже как модуль процессора управления электродвигателем (MCPU) или основной модуль 30 автопилота. MCPU включает в себя три микропроцессора, каждый из которых может называться процессором управления электродвигателем (MCP). Существуют три MCP, индивидуально обозначенные как MCP A, MCP B и MCP C. Каждый из этих модулей процессора может обращаться к выделенному комплекту датчиков, состоящему из трехосевых датчиков скорости MEMS и трехосевых акселерометров MEMS, обозначенных номерами 142a, 142b и 142c ссылочных позиций, соответственно. MCP используются для обеспечения внутреннего контура общей системы управления, имеющей внутренний контур управления и внешний контур управления. MCP обеспечивает передачу команд в бесщеточный электродвигатель постоянного тока. Электродвигатель A и электродвигатель B элемента 60a привода тангажа и элемента 60b привода крена выполняют привод системы управления для вертолета. Обмен данными между процессорами может выполняться через последовательную шину, которая поставляется вместе с каждым из процессоров. Целостность данных может быть защищена, например, путем использования проверки циклической избыточности (CRC), встроенной в поток данных.
Федеральное управление авиации (FFA) сертифицирует программное обеспечение системы летательных аппаратов в соответствии с версией DO 178. Во время написания данной заявки была выпущена версия DO-178C. В этом документе установлены Уровни конструктивной надежности (DAL) на основе критичности отказа программного обеспечения в данной системе. Например, DAL A обозначен, как "катастрофический" и назначается, когда отказ может привести к катастрофе. В другом примере, DAL C разработан, как "основной", и его назначают, когда отказ является существенным и может привести к дискомфорту пассажира или повышенной нагрузке на экипаж. В настоящем варианте воплощения каждый из трех MCP может выполнять идентичное программное обеспечение DAL A, так, чтобы составить систему с тройным резервированием. Процессоры управления электродвигателем взаимно соединены так, что они могут выполнять обмен данными. Каждый процессор считывает свой набор датчиков и сравнивает их данные с данными датчиков, поступающими из других двух процессоров, с целью последовательности, и каждый процессор управления электродвигателем рассчитывает средние значения всех соответствующих датчиков для использования с целью дальнейшей обработки. В другом варианте осуществления могут быть определены срединные значения, в отличие от средних значений. Данные датчика, определенные, как ошибочные, устраняют, так, чтобы они не оказывали влияния на медианное значение. В общем, детектирование отказа датчика (в отличие от присутствия случайного шума) может быть выполнено путем обработки данных датчика для каждого из трех наборов датчиков путем фильтрации низкой частоты для удаления шумов. Фильтруемые выходные сигналы сравнивают друг с другом для последовательности, если один из фильтруемых результатов существенно отличается (например, находится за пределами заданного порогового значения) из других двух результатов, датчик, взаимосвязанный с этими данными, может быть задекларирован, как датчик с отказом. Детектирование отказа гиродатчика скорости может быть выполнено аналогичным образом с дополнительным этапом пропуска данных гиродатчика через промывающие фильтры перед фильтрами низкой частоты, для удаления эффектов смещения или дрейфа. После обработки двумя фильтрами, выходные данные гиродатчика можно сравнивать друг с другом для соответствия, и любой гиродатчик, формирующий значение, находящееся за их пределами, можно рассматривать, как неисправный. Сигнал предупреждения в виде звукового и/или светового сигнала может быть передан в модуль 28 процессора дисплея автопилота (ADPU) на приборной панели 20 (фиг. 1). Тактильную обратную связь, такую как, например, сотрясение рычага можно использовать отдельно или в комбинации с другими показаниями предупреждения. В варианте осуществления блок 150 оповещения может включать в себя световые сигналы статуса лучше всего видны в увеличенном отдельном виде ADPU на фиг. 1, и включает в себя зеленый (нормальный), желтый (предупреждение)) и красный (критический отказ), а также два рупора предупреждения, которые обеспечивают показания о статусе системы. Рупоры предупреждения также обеспечивают уведомления о статусе системы и подают сигналы тревоги вместе со световыми сигналами статуса. Как световые сигналы статуса, так и рупоры непосредственно связаны через интерфейс MCP. В некоторых вариантах осуществления звуковые сигналы и/или сигналы предупреждения могут быть переданы через аудиосистему вертолета таким образом, чтобы уведомления можно было слышать через головную гарнитуру пилота из ADPU. Световые сигналы статуса и сигналы рупора дополняют дисплей, на которой представлены текущие установки системы автопилота, такие как состояние соединения, к3урс, дорожка, синхронизированное направление гироскопа, скорость относительно земли и любые предупреждающие сообщения. Также на панели предусмотрена кнопка тестирования, которая инициирует инициируемый встроенный тест (IBIT).
Автопилот 12 может быть выполнен с возможностью генерировать сигналы управления элементами привода на основе набора сигналов датчиков, которые используются MCP для управления полетом вертолета в соответствии с выбранный одним множества режимов полета. MCP может дополнительно генерировать скорректированный выходной сигнал гиродатчика на основе не более, чем того же набора выходных сигналов датчиков. Как можно видеть, дисплей автопилота может быть выполнен с возможностью отображения информации о режиме полета автопилота для пилота при отображении для пилота синхронизированного выходного сигнала гиродатчиков на основе синхронизированного выходного сигнала гиродатчика. Дисплей автопилота может быть предусмотрен на одном экране, хотя при этом не требуется, чтобы одновременно отображались информация о режиме полета автопилота и синхронизированного выходного сигнала гиродатчиков. В одном варианте осуществления, для получения синхронизированного выходного сигнала гиродатчиков компоновка датчика включает в себя гиродатчик скорости рыскания, который формирует выходной сигнал скорости рыскания. MCP выполнены с возможностью интегрирования выхода скорости рыскания, для получения курса с учетом рыскания. Поскольку гиродатчик скорости рыскания может проявлять существенный дрейф, в частности, когда используется датчик скорости MEMS, MCP периодически обновляют курс с учетом рыскания для компенсации дрейфа скорости рыскания. В варианте осуществления компоновка датчика включает в себя GPS, который формирует курс GPS, и компоновка обработки периодически обновляет курс с учетом рыскания на основе курса GPS. В другом варианте осуществления компоновка датчиков включает в себя компоновку магнитометра, которая формирует магнитный сигнал курса, и компоновка обработки периодически обновляет курс с учетом рыскания, на основе курса по магнитному сигналу.
В другом варианте осуществления, для формирования синхронизированного выходного сигнала гиродатчиков, компоновка датчика включает в себя трехосевой гиродатчик скорости, и трехосевой акселерометр, и компоновка обработки выполнена с возможностью генерировать высоту вертолета, включающую в себя курс с учетом рыскания. Высота может быть определена по внутреннему контуру, по существу, одновременно, используя набор выходных сигналов датчика. В одном варианте осуществления высоту можно наблюдать или отслеживать по внутреннему контуру, на основе интеграции выходных сигналов датчиков скорости. В другом варианте осуществления внутренний контур может определять высоту вертолета на основе направления матрицы направляющих косинусов. Последняя может взаимозаменяемо называться матрицей вращения, которая характеризует один опорный фрейм относительно другого опорного фрейма, с учетом вращения. Входные сигналы гиродатчика скорости используются, как входной сигнал для интегрирования, для определения высоты вертолета. В этом отношении, все определения могут быть сформулированы с учетом векторного произведения и скалярного произведения. В еще одном, другом варианте осуществления можно использовать кватернионы с целью определения высоты вертолета. В любом случае, поскольку определенный курс с учетом рыскания подвергается дрейфу скорости рыскания, которая проявляется в трехосевых гиродатчиках скорости, компоновка обработки выполнена с возможностью, по меньшей мере, периодически регулировать курс с учетом рыскания для компенсации дрейфа скорости рыскания и получения скорректированного выходного сигнала гиродатчиков. Курс с учетом рыскания может периодически обновляться на основе либо магнитного курса или курса GPS.
MCP также считывают данные датчика Холла из электродвигателей привода, которые могут использоваться для обозначения текущего положения каждого элемента привода, и сигнал управления, поступающий из процессора дисплея автопилота (ADP), который формирует часть ADPU. В этом отношении, ADPU используется, как внешний контур управления для обеспечения сигналов команды для внутреннего контура. Используя все эти данные, каждый MCP рассчитывает сигнал управления электродвигателем для электродвигателей в отношении PWM (широтно-импульсная модуляция) и направления вращения. В каждом процессоре также используются данные датчика Холла для управления силовым соединением с ротором бесщеточного электродвигателя, назначенного для него. Каждый MCP сравнивает свой сигнал команды PWM и направление вращения для элементов привода тангажа и крена, при этом команды генерируются другими двумя MCP по соглашению. Поскольку все процессоры используют одни и те же данные для расчета сигналов управления электродвигателем, они должны производить идентичные выходные сигналы. Сигналы для согласия/несогласия с другими двумя процессорами передают в блок 200 голосования, который отключает возможность ввода сигнала управления любого MCP, который не согласен с другими двумя MCP. В настоящем варианте осуществления, блок 200 голосования был воплощен в аппаратных средствах, однако, он легко может быть воплощен в виде программного обеспечения.
Внимание теперь будет направлено на более подробную информацию относительно элементов 60 привода со ссылкой сначала на фиг. 3. Следует понимать, что для передаточного числа 1720:1, один оборот электродвигателя поворачивает выходной вал элемента привода только приблизительно на 0,2 градуса. И само по себе такое разрешение может быть достаточным для отслеживания выходного положения элемента привода. Например, вращение вала электродвигателя можно детектировать, используя магнит, который установлен на валу, как понятно для специалиста в данной области техники. В варианте осуществления, как описано в указанном выше представленном здесь по ссылке Приложении регистрационный №13/763,574 (регистрационный номер патентного поверенного HTK-2), однако данные датчика Холла от электродвигателей можно использовать для определения последовательного приращения положения выходного вала элемента привода каждого из элемента привода. В этом отношении, каждый электродвигатель элемента привода включает в себя 3 датчика Холла. Импульсы датчика Холла могут действовать, как счетчик повышающего/понижающего подсчета с последовательным приращением. Положение выходного вала относительно опорного местоположения можно постоянно отслеживать. Например, нулевое опорное местоположение выходного вала элемента привода может быть определено, когда элемент привода соединен через муфту 84. Такое отслеживание нулевого опорного положения можно использовать для определенных отказов, в котором, наилучший подход состоит в восстановлении рычагов/валов элемента привода в их усредненном положении перед отказом. Поскольку каждый электродвигатель включает в себя 3 датчика Холла и 4 полюса, существуют 12 изменений состояния Холла на оборот каждого электродвигателя. В частности, при отслеживании изменения состояния Холла, можно повысить разрешающую способность с коэффициентом 12 таким образом, что обеспечивается разрешающая способность приблизительно 0,017 градусов на выходном валу элемента привода. В варианте осуществления соответствующее движение в верхней части рычага на фиг. 1 может составлять приблизительно 0,004 дюйма.
Как описано выше, каждый элемент привода включает в себя электродвигатель A и электродвигатель B. Каждым отдельным электродвигателем управляет один MCP. Таким образом, только MCP A и MCP B управляют электродвигателями. В частности, MCP A управляет электродвигателем A в каждом из элемента привода 60a тангажа и элемента привода 60b крена, в то время как MCP B управляет электродвигателем B в каждом из элемента привода 60a тангажа и элемента 60b привода крена. MCP C (третий процессор) не управляет электродвигателем, но выполняет все расчеты для генерирования команд для рычага управления, как если бы он управлял электродвигателем. В этом отношении, третий электродвигатель может быть непосредственно добавлен к каждому элементу привода (см. фиг. 4), который мог бы зацепляться с зубчатым колесом 102 таким же образом, как и электродвигатель A, и электродвигатель B, но под управлением MCP C. Последний, однако, подключается таким образом, что он идентичен двум другим процессорам. Например, если MCP A и MCP C согласны в отношении управления электродвигателем тангажа, но MCP B не согласен, тогда MCP B по голосованию будет исключен из управления его электродвигателем тангажа, MCP B продолжит управление своим электродвигателем тангажа до тех пор, пока MCP A и MCP C также не исключат его по голосованию из управления этим электродвигателем. С другой стороны, если MCP C будет исключен по голосованию, это не повлияет на электродвигатели привода, но предупреждающий световой сигнал и рупор могут быть активированы, как, например, в случае MCP, который управляет электродвигателями. Более подробная информация об этой архитектуре представлена ниже.
Элементы привода разработаны таким образом, что любой один из электродвигателя A или электродвигателя B независимо выполнен с возможностью привода элемента привода, для управления вертолетом. Выходной вал электродвигателя, в котором произошел отказ, будет вращаться оставшимся электродвигателем. Если один из MCP A или MCP B будет исключен по голосованию, автопилот может продолжить свою функцию, несмотря на тот факт, что каждый из этих MCP управляет электродвигателями. Как упомянуто выше, могут использоваться световые сигналы предупреждения и краткие звуковые сигналы рупора для уведомления пилота о том, что возникла некритичная неисправность автопилота.
MCP обладают полными полномочиями в отношении элементов управления и ограничены по скорости только естественным откликом системы, который составляет приблизительно 5 дюймов в секунду. Блок управления MCP представляет собой единственный участок автопилота, который может приводить к критической или основной неисправности, по меньшей мере, частично с учетом скорости движения рычага управления. В соответствии с этим, MCPU разработан, как блок с тройным резервированием, при этом DAT A представляет собой специализированное программное обеспечение, предназначенное для обеспечения работы внутреннего контура автопилота. Эти факторы существенно уменьшают вероятность критического отказа. Заявители, однако понимают, что программное обеспечение, соответствующее внешнему контуру, может быть отделено от программного обеспечения внутреннего контура таким способом, который позволяет обеспечить программное обеспечение внешнего контура на другом конструктивном уровне обеспечения, чем внутренний контур. В настоящем варианте осуществления нижняя сертификация DAT C применялась для программного обеспечения внешнего контура, поскольку последний не может вызвать критический отказ. В этом отношении, внешний контур управления содержит больше ограниченных полномочий, чем внутренний контур. Таким образом, внешний контур может передать команды в отношении только малых, быстрых движений элементов привода и медленного большого движения элемента привода. Внутренний контур, в отличие от этого, может обеспечивать быстрые изменения отклика в соответствии с порывами ветра и другими внезапными изменениями высоты, в то время как изменения внешнего контура конструктивно предназначены для поддержания целевых параметров навигации и требований регулировки. В этом отношении, частотные отклики внутреннего и внешнего контуров управления отделены друг от друга таким образом, чтобы эти два контура не взаимодействуют, для получения колебаний. Таким образом, даже при отказе внешнего контура, вертолет будет продолжать поддерживать высоту, при соответствующих звуковых и световых сигналах предупреждения, в случае возникновения терпимой неисправности. В другом варианте осуществления программное обеспечение внешнего контура, так же, как и программное обеспечение внутреннего контура, может быть сертифицировано в соответствии с DAT A. Далее, внешний контур, в соответствии с настоящим вариантом осуществления, включает в себя более низкий уровень резервирования аппаратных средств, как будет видно ниже.
Программное обеспечение внешнего контура обрабатывается процессором дисплея автопилота (ADP) в ADPU 28. MCP преобразует запрашиваемые команды автопилота из ADP в сигналы управления элемента привода, которые могут выполнять привод электродвигателей элемента привода в рамках определенных рабочих пределов. В этом отношении, следует понимать, что программное обеспечение DAL обрабатывается MCP с тройным резервированием, в то время как DAL С, программное обеспечение внешнего контура, обрабатывается совершенно другим процессором. В качестве еще одного другого пояснения отдельно исполняемая программа работает в каждом MCP. MCP, которые могут называться тройными процессорами, могут выполнять идентичное программное обеспечение. Таким образом, законы управления автопилотом распределяются между ADP и тройными процессорами. ADP обрабатывает динамические характеристики внешнего контура и режимы автопилота, в то время как три MCP обрабатывают динамические характеристики внутреннего контура. Законы управления внешними контурами относятся к функциям навигации, в то время как законы управлении внутренним контуром относятся к управлению пространственным положением на, по меньшей мере, по существу, мгновенной основе. ADP дополнительно обеспечивает графический интерфейс и интерфейс тестирования пилота для автопилота и выполняет законы управления автопилотом для определения команды элемента привода, на основе датчика и данных GPS. В соответствии с этим, данный процессор сообщается через интерфейс ADP непосредственно с GPS и трехосевыми магнитометрами, и опосредованно с трехосевыми акселерометрами, и трехосевыми гиродатчиками скорости MCP, которые предоставляют данные о скорости крена, положении крена, скорости тангажа, положении тангажа, положении, пространственном положении, скорости относительно земли, курсе и направлении. ADP отслеживает работоспособность этих датчиков, но не проверяет достоверность этих данных. Переключатель теста IBIT также соединяется через интерфейс с ADP. В другом варианте осуществления, который будет подробно описан ниже, ADP может быть разработан таким же образом, как MCPU, с тройной избыточностью. Используя оба MCPU и ADP в конфигурации с тройной избыточностью, автопилот может быть устойчивым к одному отказу в любом или в обоих из этих модулей и все еще оставаться полностью функциональным. Когда используется тройное конструктивное резервирование, как во внутреннем, так и во внешнем контурах, получают конструкцию, сохраняющую работоспособность при одиночных отказах. Поэтому, компонент внутреннего контура, такой как, например, MCP (тройной процессор) или внешнего контура, такой как, например, тройной процессор ADP, могут приводить к отказу, и автопилот при этом, тем не менее остается полностью функциональным.
MCP принимают данные из ADP, которые могут включать в себя команды, а также данные из внешнего GPS. Данные могут быть отсеяны каждым MCP для детектирования ошибок или неисправностей. Команда управления представляет собой смещение скорости, ограниченное MCP. MCP не позволяет команде из ADP создавать опасный отклик со стороны вертолета. Данные GPS используются в ADP. GPS и данные магнитометра оба используются в MCP для удаления ошибок дрейфа, взаимосвязанных с датчиками скорости каждого набора датчиков и для определения тангажа, крена и направления движения. Данные GPS также можно проверять на наличие ошибок.
MCP постоянно отслеживает, как внутренние, так и внешние неисправности. В случае неисправности ADP любой один MCP может сразу распознать ситуацию на основе обновленного соответствии сигнала скорости и управления. В ответ на это, MCPU, в одном варианте осуществления, затем обеспечивает удержание вертолета внутренним контуром управления в прямом положении и на одном уровне. В другом варианте осуществления MCPU может действовать так же, как SAS (система обеспечения устойчивости движения) или система навигационных вычислений и управлять вертолетом на основе внутренних сигналов скорости. MCP пытается поддерживать пространственное положение, и также активирует сигналы рупора и световые сигналы для обозначения отказа. Эмпирически продемонстрировали, что вертолет может поддерживать длительный полет только под управлением MCP, предоставляя более чем достаточно времени для пилота, чтобы принять управление и отключить автопилот. Возможность детектирования чрезмерного отклика автопилота заложена в трех контроллерах электродвигателей, как подробно описано здесь. Тройные процессоры отслеживает датчики и также проверяет, для подтверждения, что рассчитанные отклики находятся в пределах границ. Команды тангажа и крена из ADP ограничены на основе такой фильтрации команды каждым из тройных процессоров. Каждый из тройных процессоров может детектировать, был ли превышен предел, и может инициировать безопасное отключение автопилота. Команды осей тангажа и крена могут отслеживаться идентично, но с разными предельными значениями. Отслеживание выполняется динамически; то есть, предельные значения могут быть зависимыми от частоты/скорости. Свойства управления избыточностью для каждой оси могут включать в себя ограничение скорости передвижения рычага управления и отслеживание скорости движения корпуса.
Для каждого процессора MCP может быть предусмотрен независимый источник питания. Общий отказ питания системы электрического питания вертолета может привести к фиксации элементов привода в данном положении приблизительно на пять секунд, используя свойство динамического торможения, которое подробно описано ниже. Для пилота обычно больше, чем достаточно периода времени пять секунд, чтобы принять на себя управление. В этом отношении, автопилот не позволяет перевернуться рычагу системы управления циклическим шагом при высвобождении управления при отказе электропитания автопилота. Однако, даже когда элементы привода блокированы, пилот все еще может выполнять управление вертолетом, поскольку происходит преодоление действия автоматического управления через соединения 300a с ограничением силы (для тангажа, как показано на фиг. 1) и 300b (для крена, как показано на фиг. 1 и 2) между каждым элементом привода и рычагом системы управления циклическим шагом. Эти соединения являются жесткими для сил ниже значения страгивания и соответствуют большим силам, что позволяет пилоту безопасно маневрировать и посадить вертолет, даже если нельзя выполнить отсоединение системы. Эмпирически было продемонстрировано, что пилот может управлять вертолетом, включая в себя зависание на одном месте и посадку, с обоими элементами привода, в состоянии, которое называется состоянием "преодоления действия автоматического управления". Преодоление действия состояния автоматического управления обеспечивается в результате закорачивания всех обмоток электродвигателей элемента привода и используется в варианте осуществления динамического торможения, описанном выше. Преодоление действия автоматического управления соединений подробно описано в находящейся в совместной собственности заявке на патент США, регистрационный номер (регистрационный номер патентного поверенного HTK-4) с такой же датой подачи, как и у настоящей заявки, и которая представлена здесь по ссылке. В вертолете, в котором не используется гидравлический интерфейс для системы управления циклическим шагом, изоляторы циклической вибрации 302a (тангажа) и 302b (крена) могут быть установлены на выходном валу каждого элемента привода. Изоляторы вибрации могут быть необязательными при использовании в вертолете, в котором установлена дополнительная гидравлическая система управления циклическим шагом, поскольку гидравлическая система, в общем, обеспечивает демпфирование циклических колебаний. Изоляторы вибрации уменьшают два колебательных движения на оборот, которые присутствуют в соединении управления винтокрылым устройством R22 и в других легких вертолетах, для предотвращения вибрационных нагрузок при управлении винтокрылым летательным устройством для увеличения срока службы, уменьшая усталость компонентов привода. Изоляторы циклической вибрации подробно описаны в отдельной заявке на патент.
Набор датчиков каждого MCP может также включать в себя запоминающее устройство, такое как, например, EEPROM, или другое соответствующее запоминающее устройство. Если возникает ошибка, детектируемая MCP во время работы, код ошибки может быть сохранен в EEPROM набора датчиков, ассоциированного с MCP. EEPROM может впоследствии быть считано в контексте определения причины отказа. EEPROM также могут содержать параметры, специфичные для модели вертолета, в котором установлен автопилот, такие, как, например, константы контура управления, смещения датчика и коэффициенты усиления. В качестве другого примера, в EEPROM могут содержаться разные наборы параметров для работы во время нормального циклического управления со вспомогательным гидравлическим управлением, и в операциях, в которых, детектировали, что произошел отказ во вспомогательной гидравлической системе.
На фиг. 6 показано схематическое представление варианта осуществления блока 200 голосования по фиг. 5. Следует понимать, что специалист в данной области техники может легко воплотить версию программного обеспечения на основе аппаратной конфигурации, которая была показана. Электронное устройство 66 основного модуля (фиг. 2 и 5) включает в себя индивидуальный возбудитель для электродвигателя А и электродвигателя В для каждого элемента привода. В частности, первый возбудитель 600 возбуждает электродвигатель В элемента привода 60b крена, второй возбудитель 602 возбуждает электродвигатель В элемента 60a привода тангажа, третий возбудитель 604 электродвигателя возбуждает электродвигатель A исполнительного элемента 60b крена и четвертый возбудитель 606 электродвигателя возбуждает электродвигатель A элемента 60a привода тангажа. В этом отношении, каждый MCP генерирует отдельные команды для тангажа и крена, которые направлены на элементы 60а и 60b привода тангажа и крена, соответственно. Например, MCP A обеспечивает привод в отношении тангажа для электродвигателя A через исполнительный элемент 60a и передает элементы привода крена в электродвигатель A исполнительного элемента 60b. С целью настоящего описания логический сигнал высокого уровня для отключения входных сигналов 610 каждого возбудителя (индивидуально обозначены, как 610a-610d) приводит к отключению этого возбудителя, хотя может использоваться любая соответствующая логическая схема. Во время нормальной работы такие возбудители работают так, как будет понятно для специалиста в данной области техники в отношении возбуждения обмоток ротора бесщеточных электродвигателей постоянного тока скоординировано по времени.
Как можно видеть, статус для заданного электродвигателя определен независимо на основе независимых показателей голосования тангажа и крена, которые были выработаны MCP, которые не выполняют управление заданным электродвигателем.
Снова, как показано на фиг. 6, каждый входной сигнал 610a-610d отключения электродвигателя электрически соединен с соответствующим выходом одного из наборов логических элементов 614a-614d "И" с двумя входами. Далее, каждый элемент 614 "И" генерирует показатели голосования двух MCP, которые не ассоциированы с определенным приводом двигателя, с которым соединен каждый элемент "И". Например, логический элемент 614a "И", который может отключать возбудитель 600 для электродвигателя В элемента 60b привода электродвигателя B, вначале принимает первый показатель голосования крена из MCP, который обозначен, как "MCP A в отличие от голосования B по крену", для обозначения того, что голосование было проведено MCP A за или против команды, генерируемой MCP B. Аналогично, логический элемент 614a "И" принимает второй показатель голосования по крену из MCP C, который обозначен, как "голос по крену MCP C в отличие от B", для обозначения того, что голосование было проведено MCP C за или против команды, генерируемой MCP B. Таким образом, голоса крена, полученные MCP A и MCP C, представляют собой индивидуальные показатели этих двух MCP в отношении того, совпадает или нет текущая команда движения рычага управления по крену, генерируемая каждым из MCP A и MCP C, с командой текущего движения рычага управления креном, генерируемой MCP B. В настоящем варианте осуществления голоса, подаваемые MCP A или MCP C, которые совпадают или которые не совпадают с командой управления MCP B, характеризуют, как высокий логический уровень. Если только один из MCP A или MCP C подает голос управления креном против MCP B, только один вход логического элемента 614a И заслонка будет иметь высокий логический уровень, таким образом, что выход логического элемента 614a И остается логически низким, что не отключает возбудитель 600, и сохраняет поддержание нормального рабочего состояния электродвигателя B элемента 60b привода. С другой стороны, если оба MCP A и MCP C подают голос против управления креном со стороны MCP B, логический элемент 614a "И" выводит высокий логический уровень, который отключает возбудитель 600, таким образом, что электродвигатель В элемента 60b привода отключается. Управление каждым из остающихся трех электродвигателей воплощают, аналогично тому, как было представлено в приведенном выше описании, со ссылкой на фиг. 6.
Теперь внимание направлено на дополнительные детали в отношении внутреннего и внешнего контуров управления, в соответствии с настоящим раскрытием. В варианте осуществления внутренний контур может быть выполнен с возможностью предоставления управления для одного или больше выбранных параметров ориентации вертолета таких как, например, поддержание пространственного положения, включая в себя заданный уровень резервирования и/или сертификацию программных средств (например, DAL A), применяемых для внутреннего контура. Следует отметить, что такой вариант осуществления изобретения для поддержания пространственного положения взаимозаменяемо может называться вариантом осуществления истинного пространственного положения, как будет дополнительно описано ниже. Внешний контур автопилота может быть выполнен с возможностью предоставления, по меньшей мере, одной функции навигации в отношении полета летательного аппарата, включая в себя разный уровень резервирования, такой как, например, один процессор по сравнению с тройными процессорами внутреннего контура, и/или сертификацию программных средств, таких как, например, DAL C по сравнению с DAL A для внутреннего контура. Резервирование и/или уровень сертификации, применяемые для внутреннего контура, могут быть больше, чем резервирование и/или уровень сертификации, применяемые для внешнего контура. На основе описания, которое было представлено здесь, любая соответствующая комбинация механического резервирования и сертификация программных средств могут быть воплощены для внутреннего и внешнего контуров управления. В этом отношении, ниже более подробно описан вариант осуществления изобретения, в котором используется тройное резервирование обработки, как во внутреннем, так и во внешнем контурах управления. Следует понимать, что архитектура вариантов осуществления автопилота, которая описана здесь, обеспечивает возможность обновления, которое может быть ограничено заменой менее критичной части системы. Например, ADPU 28 на фиг. 5, в варианте осуществления, используется, как внешней контур, и может быть сертифицирован, как DAL C. Такой ADPU может быть заменен или обновлен, без влияния на внутренний контур. Например, обновление ADPU может добавить дополнительные режимы навигации для автопилота и/или уровни резервирования аппаратных средств и/или уровни сертификации программных средств.
На фиг. 7 показана блок-схема последовательности операций, в общем, обозначенная номером 700 ссылочной позиции, который иллюстрирует вариант осуществления способа работы внутреннего контура 702 и внешнего контура 704, а также взаимодействие между этими контурами. Способ начинается в 710 и переходит на 712, на котором выполняют считывание команды ADP, которая проходит из внешнего контура, как будет дополнительно описано ниже. В данный момент, достаточно отметить, что команду ADP получают для каждой итерации через внутренний контур. Решение фильтрации команды ADP выполняют в 713 в отношении того, находится ли команда ADP в приемлемых пределах, например, как описано выше. Если команда приемлема, операция переходит в 714. С другой стороны, если команда не приемлема, операция переходит к обработке 716 отказа, которая может инициировать выработку сигналов предупреждений и/или отключение автопилота. В 714, каждый MCP считывает датчики своего набора датчиков (фиг. 5), в то время как ADP считывает датчики 718 ADP и 719 GPS. В 720, данные датчика ADP совместно используются с MCP. В 722, MCP распределяют данные набора датчика MCP (фиг. 5), обменивая их друг с другом для формирования среднего набора данных датчиков, которые используются каждым MCP и которые совместно используются с ADP. Другие соответствующие варианты осуществления позволяют определять медианный набор данных датчиков. Далее, MCP определяют пространственное положение вертолета, которое также совместно используется с ADP, как обозначено соединением 724. В 726, каждый MCP определяет команды электродвигателя элемента привода. В 728, выполняется голосование на основе команды, например, используя воплощение аппаратных средств по фиг. 6 или программный эквивалент. В 729, результаты голосования сравнивают. Когда возникает диспут процессоров, операция переходит к обработке 716 отказа. Любые соответствующие действия могут быть приняты, как обработка отказа в зависимости от результатов голосования. Например, если управление проголосовало против для одного электродвигателя конкретного элемента привода, этот электродвигатель может быть деактивирован, как описано выше. Могут быть выработаны соответствующие предупреждения. Если на этапе 729 не происходит идентификация диспута голосования, операция переходит на 730, где электродвигатели активируют на основе голосования.
Снова обращаясь к фиг. 7, теперь внимание направлено на дополнительные детали в отношении операции внешнего контура 704. Следует отметить, что внутренний контур 702 и внешний контур 704 выполняются параллельно. В этом отношении, в 740, внешний контур определяет команду ADP, которая основана на текущем режиме полета и законах управлении для конкретного вертолета, в котором установлен автопилот. Законы управления и соответствующие параметры могут быть специально подготовлены для каждого конкретного вертолета. Определение основывается, по меньшей мере, частично, на данных скорости из MCP, а также на высоте вертолета, которая генерируется на этапе 722 внутреннего контура, совместно с данными из датчиков 718 ADP и GPS 719. В 760 выполняется фильтрация команды, которая используется для ограничения команд ADP, для последующего использования внутренним контуром. Текущая команда ADP подвергается фильтрации и затем считывается на этапе 712. В этом отношении, следует отметить, что на этапе 726 применяют ограничения команды для команд ADP, как описано выше.
На фиг. 8 показана схема варианта осуществления системы динамического торможения, в общем, обозначенной номером 800 ссылочной позиции, которая может использоваться, например, с элементом 60 привода по фиг. 3. Как описано выше, каждый электродвигатель может включать в себя статор, соединенный по схеме звезда. В частности, каждый электродвигатель включает в себя три обмотки статора, обозначенные, как A1-A3, для электродвигателя A и, как B1-B3, для электродвигателя B. С целью настоящего описания, следует отметить, что электродвигатели выбирают так, чтобы они по своим характеристикам проявляли сопротивление вращению ведущего вала электродвигателя в ответ на соединение накоротко или заземление обмоток привода. Наборы линий 802 и 804 возбуждения электродвигателя соединяют соответствующими возбудителями электродвигателя, например, как можно видеть на фиг. 6. Каждая обмотка статора также электрически соединена с выводом D стока одного из группы из шести n-канальных MOSFET, работающих в усиленном режиме, индивидуально обозначенных, как 806a-f, и которые могут совместно называться MOSFET 806. Вывод S истока каждого из этих транзисторов соединен с землей 810. В соответствии с этим, положительное напряжение на выводе G затвора этих MOSFET включает каждый из MOSFET таким образом, что канал сток - исток, по существу, соединяется накоротко, таким образом, что он функционирует, как переключатель, для подключения или соединения накоротко соответствующей статорной обмотки с землей. Схема 820 возбуждения принимает входное питание от вертолета, которое обозначено как Vjn, и может содержать энергию от батареи, поступающую от вертолета, с целью питания автопилота. Следует понимать, что Vjn должно отражать или должно соответствовать любому отказу источника питания, который обеспечивает питание для автопилота. Для схемы 820 возбуждения подводимое питание для правильного выполнения ею операции может колебаться в пределах 9-32 вольт постоянного тока. Когда питание присутствует, во время нормальной работы вертолета, стабилитрон D2 регулирует его напряжение до 9 вольт, что производит смещение электрода на выводе затвора p канала в режиме обеднения MOSFET 830 до 9 вольт. Ток протекает через диод D1 и резистор 1 кОм в другой стабилитрон D3, который смещает напряжение на выводе истока MOSFET 830 до 7 вольт, также заряжая конденсатор C1 до 7 вольт. Таким образом, напряжение VG на MOSFET 830 составляет 2 вольта постоянного тока так, что транзистор смещается в состояние выключено. Поскольку MOSFET 830 выключен, на выводе стока этого MOSFET присутствует напряжение, равное нулю вольт, которое смещает затвор каждого из MOSFET 806 до ноля вольт таким образом, что каждый из этих транзисторов также находится в состоянии выключено. Как можно видеть, конденсатор C1 действует, как устройство накопления энергии, которое используется, как динамический источник энергии, в ответ на отказ источника энергии, который подает напряжение Vm.
Также, обращаясь к фиг. 8, в соответствии с отказом питания, при котором Vin переходит в ноль вольт, напряжение MOSFET 830 затвора падает до нуля вольт, что, в свою очередь, включает транзистор. После того, как MOSFET 830 будет включен, он обеспечивает путь разряда для конденсатора C1 через резистор R3 100 Ком. Такой ток разряда приводит к приложению положительного напряжения к затвору каждого из MOSFET 806 так, что эти транзисторы включаются, соединяя, таким образом, обмотки статора электродвигателей A и B с землей, по мере того, как конденсатор C1 разряжается через R3. Таким образом, MOSFET 806 остается включенным, в соответствии с постоянной времени RC, которая определяется, в основном конденсатором, C1 и резистором R3. В настоящем примере постоянная времени составляет приблизительно 4,7 секунды. На практике MOSFET 806 остаются во включенном состоянии в течение приблизительно 4 секунд. В то время, как этот период времени может изменяться при выборе значений компонентов, его следует выбирать для обеспечения достаточного периода времени для пилота, чтобы принять от автопилота и выполнять управление вручную. Даже в течение периода времени, когда применяется торможение, пилот имеет возможность взять на себя и поддерживать управление вертолетом, благодаря присутствию соединения 300a и 300b с ограниченной силой, как описано выше и представлено на фиг. 1 и 2. Для специалиста в данной области техники будет понятно, что схема на фиг. 8 может быть легко модифицирована и адаптирована с учетом конкретной установки. В то время, как настоящий вариант осуществления был описан в отношении использования MOSFET, следует понимать, что в других вариантах осуществления может применяться любой соответствующий тип транзистора, с использованием одного типа транзистора или соответствующей комбинации разных типов транзисторов. В качестве неограничительного примера соответствующие типы транзистора включают в себя, помимо прочих, биполярные транзисторы, JFET и IGFET.
Как снова показано на фиг. 5 и на фиг. 8, следует понимать, что используются два варианта установки схемы на фиг. 8. Таким образом, один вариант схемы на фиг. 8 соединен с электродвигателями каждого из элементов привода крена и элемента привода тангажа. Благодаря временному соединению накоротко обмоток электродвигателя на землю, на основе постоянной времени, описанной выше, формируется сопротивление вращению выходного вала каждого из электродвигателей. Степень сопротивления усиливается компоновкой зубчатых колес элемента привода таким образом, что существенная сила необходима для перемещения рычага управления из положения, в котором произошел отказ питания. Эмпирические результаты продемонстрировали, что рычаг управления не перевернется в результате отказа питания автопилота, представляя, таким образом, для пилота достаточно времени, чтобы принять на себя управление вертолетом от автопилота. Следует понимать, что динамическое торможение, как описано здесь, можно использовать с любым электродвигателем, который проявляет сопротивление в ответ на короткое замыкание, по меньшей мере, выбранных обмоток возбуждения.
На фиг. 9 иллюстрируется другой вариант осуществления системы динамического торможения, в общем, обозначенной номером 900 ссылочной позиции, которая может использоваться, например, с элементом 60 привода на фиг. 3. В этом варианте осуществления каждая обмотка электродвигателя соединена с одним из вывода нормально замкнутого контакта, индивидуально обозначенного, как NC1, NC2 и NC3. Противоположный вывод каждого контакта NC соединен с землей 810. Каждое из первого реле 902 и второго реле 904 включает в себя обмотку реле, которая возбуждается напряжением Vin. В то время как в настоящем примере иллюстрируется использование 3 полюсного одноходового реле (имеющего только нормально замкнутые контакты), взаимосвязанного с каждым из электродвигателей, следует понимать, что можно использовать любой соответствующий тип реле. Во время нормальной операции Vin прикладывают к каждой обмотке реле таким образом, что нормально замкнутые контакты находятся в открытом состоянии. Однако, если Vin теряется, нормально замкнутые контакты замыкаются, соединяя каждую из обмоток статора с землей, прикладывая, таким образом, динамическое торможение, как описано выше. Поскольку электродвигатели остаются в заторможенном состоянии в ответ на отказ питания, пилот может принять на себя управление и может управлять вертолетом, благодаря присутствию соединения 300a и 300b с ограниченной силой, как описано выше, и представлено на фиг. 1 и 2.
В то время как описанные выше варианты осуществления с динамическим торможением были представлены в контексте применения сил торможения для циклического управления, следует понимать, что силы торможения могут применяться без ограничения к любому соответствующему соединению управления, в котором элементы привода соединены механически. Например, динамическое торможение может применяться для педалей хвостового ротора вертолета. В другом примере динамическое торможение может применяться для общего управления. Кроме того, в некоторых вариантах осуществления может использоваться динамическое торможение без использования элемента привода, как части системы автопилота.
Теперь внимание будет направлено на фиг. 10, на которой показана блок-схема, иллюстрирующая другой вариант осуществления автопилота, в соответствии с настоящим раскрытием, в общем, обозначенного номером 1000 ссылочной позиции. В степени, в которой автопилот 1000 соответствует ранее описанному автопилоту 12 на фиг. 5, описания одинаковых компонентов не будут повторяться для краткости изложения. Основное различие в отношении автопилота 1000 относится к предоставлению тройных блоков обработки ADP, как части ADPU 28ʹ, которые обозначены номерами 1002, 1004 и 1006 ссылочной позиции. MCPU 30ʹ также включает в себя тройной процессор/MCP, но вместо этого, выполнено с возможностью взаимодействовать с тремя ADP. Каждый из тройных блоков обработки ADP включает в себя специализированный набор датчиков, обозначенный как 1010, 1012 и 1014, соответственно. Аналогично блоку обработки ADP на фиг. 5, тройной ADP работает на основе законов управления, например, относящихся к режимам навигации, в то время как законы управления ручкой MCP, относящиеся к мгновенному управлению пространственным положением таким образом, что они взаимодействуют с тройным ADP для выполнения различных режимов навигационного управления. В настоящем варианте осуществления каждый набор датчиков включает в себя трехосевой магнитометр. Кроме того, в настоящем варианте осуществления, каждый из трех блоков обработки принимает входные данные GPS из специализированного модуля GPS. В других вариантах осуществления два модуля GPS могут использоваться в комбинации с другими соответствующими источниками данных, предоставляющими данные, такими, как, например, скорость воздуха и высота на основе давления. В этом отношении, варианты осуществления могут принимать команды из другого модуля навигации. Такие команды могут включать в себя, например, команды крена и команды управления. В некоторых вариантах осуществления могут использоваться три или больше модуля GPS. В еще одном, другом варианте осуществления один модуль GPS может использоваться совместно с другими датчиками, с целью обеспечения резервирования. В качестве не ограничительного примера, благодаря определению статического давления для высоты на основе давления, эту высоту можно использовать вместо высоты GPS из второй, резервной GPS. С целью управления блоком 150 оповещения может быть предусмотрен блок 1020 голосования оповещения, который может включать в себя два рупора предупреждения; зеленую лампу нормального режима; желтую лампу предупреждения и красную лампу отказа. Блок 1020 голосования, таким же образом, который напоминает описанный выше блок 200 голосования по фиг. 5 в отношении управления электродвигателем MCP, может производить голосование для управления объявлениями любого одного тройного процессора/MCP, которые не согласны с другими двумя тройными процессорами. Каждый из трех ADP выполняет специализированный обмен данными с соответствующим MCP таким образом, что каждый MCP принимает команды управления из одного ADP с той целью, с которой MCP генерирует сигналы управления электродвигателем. Каждая пара ADP и MCP могут работать в соответствии со схемой потока на фиг. 7. Таким образом, команда ADP, генерируемая каждым ADP, влияет на сигнал управления электродвигателем своего ассоциированного MCP таким образом, что MCP, который ассоциирован с ADP, в котором произошел отказ, будет голосовать против управления электродвигателем, как описано выше. Конечно, тройной ADP C не используется для управления электродвигателем, как описано выше, будучи ассоциированным с MCP C, но используется для голосования с целью сравнения. В другом варианте осуществления, блок 200 голосования может работать по голосам, которые подают ADP, которые генерируют аналогично голосам, которые формируют MCP, как описано выше. На основе представленного выше описания, следует понимать, что вариант осуществления на фиг. 10 можно рассматривать, как обладающий устойчивостью к отказу, при котором может выполняться половина функций. То есть, автопилот остается полностью функциональным, например, несмотря на полный отказ любого из тройных процессоров ADP или любого одного из тройных процессоров MCP. Конечно, могут быть поданы сигналы тревоги для обозначения присутствия отказа для пилота, однако автопилот может продолжить работать без необходимости вмешательства пилота.
В то время как в представленном выше описании подробно описаны варианты осуществления внутреннего контура управления, в котором обеспечивается функция удержания пространственного положения или истинного пространственного положения, которые обеспечивают возможность восстановления из необычных положений при соединении, следует понимать, что внутренний контур управления может быть выполнен по-другому в других вариантах осуществления. Например, в другом варианте осуществления внутренний контур управления может быть основан на скорости. В таком варианте осуществления внутренний контур управления пытается удерживать скорости, равными нулю. Таким образом, внутренний контур управления, основанный на скорости, пытается поддерживать текущее пространственное положение вертолета, по меньшей мере, постоянным, независимо от того каким может быть текущее пространственное положение во время подключения автопилота. В таком варианте осуществления нет необходимости, чтобы внутренний контур корректировал дрейф датчиков скорости с MCP за пределами, например, фильтров промывки, которые удаляют систематические ошибки. Поэтому, текущее пространственное положение поддерживается, как, по меньшей мере, некоторая константа, которая подвергается дрейфу со стороны датчиков скорости. Дрейф гироскопа скорости может привести к изменению значений тангажа и крена. В частности, дрейф тангажа может влиять на режимы поддержания высоты и поддержания скорости, в то время как дрейф крена и дрейф рыскания могут влиять на маршрут полета. В этом отношении, однако внешний контур управления, как описано выше, может компенсировать и может выполнять постепенные необходимые изменения, для коррекции ошибок дрейфа пространственного положения таким же образом, как если бы эти ошибки были вызваны, например, долговременными изменениями ветра. По этой причине в данном варианте осуществления не требуются такие датчики, как трехосевой акселерометр, во внутреннем контуре управления, для обеспечения коррекции дрейфа, поскольку требуется только определение скорости гиродатчика. Таким образом, наборы датчиков MCP, показанные на фиг. 5, не требуют трехосевых акселерометров. Следует, однако, помнить, что внутренний контур управления на основе скорости не определяет фактическое или истинное пространственное положение вертолета и, поэтому, не может обеспечивать надежное восстановление из необычного пространственного положения во время подключения. Термин "истинное пространственное положение", используемый здесь, предназначен для охвата технологий, которые являются полностью характерными для пространственного положения летательного аппарата, по меньшей мере, в аппроксимации, в которой может присутствовать неизбежная ошибка, такая как, в качестве не ограничительного примера, неточности измерений.
Также подробно описывая вариант осуществления внутреннего контура управления на основе скорости, структура внутреннего контура управления/внешнего контура управления, описанная выше, может сохраняться. Акселерометры, описанные выше для внутреннего контура (фиг. 5 и 10), могут быть перемещены во внешний контур и, в варианте осуществления, также могут быть уменьшены только до одной оси, для отслеживания нагрузки (G). Магнитометры остаются, как части внешнего контура управления в системе на основе скорости. Поскольку дрейф скорости гиродатчиков невозможно отличить от дрейфа под воздействием ветра, законы управления внешним контуром позволяют учитывать этот дрейф одинаковым образом. В варианте осуществления, в котором не требуется использовать фактическое направление в качестве входных данных, могут не потребоваться магнитометры в ADPU, в частности, когда встроена GPS, которая обеспечивает выходные данные курса. Как описано выше, контур внутреннего управления удерживается полностью полномочным и ограниченным по скорости, только откликом системы. Во время работы внутренний контур вырабатывает сигналы управления, которые необходимы для поддержания скоростей, по существу, мгновенных изменений пространственного положения. Внешний контур управления остается более ограниченным в своих полномочиях, в том, что он может подавать команды только на выполнение малых быстрых движений элемента привода и малого движения большого элемента привода. Аналогично варианту осуществления поддержания пространственного положения, разделение функции между внутренним и внешним контурами управления обеспечивает возможность использования программных средств с разной надежностью и/или DAL в данных двух контурах.
Внимание теперь направлено на фиг. 11, на которой представлен график, иллюстрирующий шесть режимов работы автопилота, в соответствии с настоящим раскрытием, сопоставленные с сигналами датчиков, и значениями, которые используются в каждом режиме. График на фиг. 11 описывает 6 режимов автопилота, таких, как обозначены заголовками столбцов "внутренний контур" и "внешний контур". Заголовок столбца внутренний контур включает в себя подстолбцы, которые представлены в таком порядке, как "режим", "заголовок", в котором обозначено название каждого режима, "скорости", в котором обозначены оси, вокруг которых измеряют конкретные сигналы скорости гиродатчиков, "ускорение", в котором обозначены оси, вдоль которых измеряют определенные сигналы акселерометра,
"Курс", в котором обозначен курс или путь по земле, "lat/lon", в котором представлен сигнал положения GPS, включая в себя широту и долготу, "скорость", которая обозначает скорость на основе GPS или скорость летательного аппарата на основе датчиков, и "Mag", в котором обозначены конкретные оси, вдоль которых измеряли показания магнитометра. Заголовок столбца внешнего контура включает в себя те же под столбцы, что и заголовок столбца внутреннего контура с добавлением "Alt", в котором представлены показания высоты, которые могут быть основаны на GPS или могут быть определены с помощью инструмента, чувствительного к давлению, и "пространственное положение", которое представляет собой истинное пространственное положение, определенное внутренним контуром управления.
Режим 1 представляет собой курс на основе скорости и режима поддержания скорости, в котором используется сигнал скорости крена MEMS, сигнал скорости тангажа MEMS и вертикального акселерометра для внутреннего контура. Акселерометр вертикальной оси может использоваться в любом режиме для обеспечения отсутствия нарушений в отношении предельной нагрузки вертолета. Таким образом, маневры, которые могли бы привести к состоянию низкого значения G для вертолета, имеющего ротор с 2 лопастями, могут быть исключены, так же, как и маневры, которые могли бы привести к состоянию с большим значением перегрузки, превышающим конструктивные пределы вертолета. Во внешнем контуре для режима 1 используется курс GPS, сигнал скорости рыскания MEMS, а также сигналы акселерометров скорости тангажа и вертикального акселерометра. Сигнал скорости может быть получен из GPS или может быть предоставлен датчиком скорости воздуха летательного аппарата, как в случае любого режима. В некоторых вариантах осуществления во внешнем контуре для режима 1 может использоваться информация GPS вместо сигналов скорости тангажа и/или рыскания.
Режим 2 представляет собой курс на основе скорости и режима поддержания высоты, в котором используется сигнал скорости крена MEMS, сигнал скорости тангажа MEMS и вертикального акселерометра для внутреннего контура. Внешний контур для режима 2 может использовать те же сигналы, что и внешней контур для режима 1 в дополнение к сигналу высоты. Сигнал высоты может представлять собой сигнал на основе GPS или может быть получен от датчика высоты на основе давления.
Режим 3 представляет собой режим зависания на основе скорости/режима удержания положения, в котором используется сигнал скорости крена MEMS, сигнал скорости тангажа MEMS и вертикальный акселерометр для внутреннего контура. Внешний контур для режима 3 может использовать те же сигналы, что и внешний контур для режима 1, с дополнением сигнала скорости рыскания MEMS и сигнала положения GPS, который обеспечивает широту и долготу. Сигнал высоты не требуется, поскольку в этом режиме не выполняется управление высотой в настоящем варианте осуществления. Следует, однако, отметить, что сигнал высоты может использоваться с целью обозначения текущего значения высоты для пилота и/или для обозначения изменения относительно требуемой высоты для пилота.
Также используются сигналы горизонтального магнитометра, который может быть ориентирован вдоль осей тангажа и крена винтокрылого летательного аппарата.
Режим 4 представляет собой режим курса истинного пространственного положения и режим удержания скорости, в котором используется трехосевой датчик скорости MEMS, трехосевой акселерометр MEMS и трехосевой магнитометр для внутреннего контура. В последнем дополнительно используется сигнал курса GPS и может использоваться сигнал скорости GPS. В другом варианте осуществления сигнал скорости может быть предоставлен с помощью датчика скорости воздуха летательного аппарата. Во внешнем контуре для режима 4 используется курс GPS, а также сигналы тангажа и рыскания, сигнал вертикального акселерометра, сигнал оценки внутреннего контуре пространственного положения самолета и скорости. В некоторых вариантах осуществления во внешнем контуре для режима 4 может использоваться информация GPS вместо сигналов скорости тангажа и/или рыскания, и/или оценки пространственного положения самолета.
Режим 5 представляет собой режим поддержания курса истинного пространственного положения и режим поддержания высоты, в котором используется трехосевой датчик скорости MEMS, трехосевой акселерометр MEMS и трехосевой магнитометр для внутреннего контура. Последний дополнительно использует сигнал курса GPS и может использовать сигнал скорости GPS. В другом варианте осуществления сигнал скорости может быть предоставлен датчиком скорости воздуха летательного аппарата. Во внешнем контуре для режима 5 используются те же сигналы, что и во внешнем контуре режима 4 в дополнение к GPS или высоте на основе давления. В некоторых вариантах осуществления во внешнем контуре для режима 5 может использоваться информация GPS вместо сигналов скорости тангажа и/или скорости рыскания, и/или оценки пространственного положения самолета.
Режим 6 представляет собой режим истинного пространственного положения при зависании/удержании положения, при котором используются трехосевой датчик скорости MEMS, трехосевой акселерометр MEMS и трехосевой магнитометр для внутреннего контура. Последний дополнительно использует сигнал курса GPS и может использовать сигнал скорости GPS. В другом варианте осуществления сигнал скорости может быть предусмотрен датчиком скорости воздуха самолета. Во внешнем контуре в режиме 6 используются те же сигналы, как и во внешнем контуре в режиме 4 с добавлением сигнала скорости рыскания и сигнала положения GPS, который обеспечивает широту и долготу. В некоторых вариантах осуществления во внешнем контуре в режиме 6 может использоваться информация GPS вместо сигналов скорости тангажа, рыскания и/или крена и/или оценки пространственного положения самолета.
Выше было представлено описание изобретения с целью иллюстрации и описания. При этом оно не предназначается быть исчерпывающим или не должно ограничивать изобретение точной раскрытой формой или формами. Например, вторая реализация автопилота в настоящем раскрытии при конкретной установке может обеспечить управление всеми элементами управления и педалями хвостового ротора при использовании соответствующего программного обеспечения. Таким образом, полное управление автопилотом может быть воплощено, используя "первый" автопилот, как описано выше, и "второй" автопилот, который управляет другими элементами управления полетом. Такая модифицированная/двойная система автопилота включает в себя четыре независимых вала элемента привода и может обеспечивать рабочий режим, в котором поддерживаются, как скорость, так и пространственное положение, и/или другой режим работы, в котором поддерживается одновременно скорость снижения/подъема и скорость без каких-либо управляющих воздействий со стороны пилота. В общем, в таком варианте осуществления, внутренний контур второго автопилота может управлять боковым скольжением, используя элемент привода педали и поддерживать высоту постоянной, используя группу элементов привода. Поскольку внутренний контур первого автопилота, как описано выше, может поддерживать постоянным тангаж, скорость воздуха может поддерживаться постоянной в результате управления тангажом. Учитывая это, второй автопилот может управлять высотой, используя совместные элементы привода. В качестве входных сигналов совместного управления, требования по поддержанию высоты и/или скорости подъема/снижения могут быть основаны, например, на данных GPS или данных давления, в режимах управления внешнего контура, который управляет подходами к полету, или VNAV (вертикальная навигация), в которой устанавливается требование к скорости вертикальной навигации. В соответствии с другими модификациями и вариациями специалисты в данной области техники, с учетом представленного выше описания, могут распознать определенные модификации, перемены, добавления и их подкомбинации.
Все элементы, части и этапы, описанные здесь, предпочтительно, включены. Следует понимать, что любые из этих элементов, частей и этапов могут быть заменены другими элементами, частями и этапами или могут быть удалены в целом, как будет очевидно для специалиста в данной области техники.
В данном описании раскрыто, по меньшей мере, следующее: система автопилота вертолета включает в себя внутренний контур для поддержания пространственного положения во время полета вертолета, включающая в себя заданный уровень резервирования, применяемый во внутреннем контуре. Внешний контур выполнен с возможностью предоставления функции навигации для полета вертолета, включающей в себя другой уровень резервирования, кроме резервирования во внутреннем контуре. Элемент привода обеспечивает силу торможения для соединения, которая используется для стабилизации полета вертолета во время отказа питания. Элемент привода является электромеханическим и принимает электрические сигналы возбуждения для обеспечения автоматического управления полетом вертолета, без необходимости использования гидравлической вспомогательной системы вертолета. Автопилот может управлять вертолетом в режиме отказа вспомогательной гидравлической системы. Множество режимов полета описано в связи с соответствующими сигналами датчиков, включая в себя режимы, основанные на скорости и истинном пространственном положении самолета.
КОНЦЕПЦИИ
Далее, в данном описании раскрыты, по меньшей мере, следующие концепции:
Концепция 1. Система автопилота для вертолета, упомянутая система автопилота, содержащая:
внутренний контур, который выполнен с возможностью, по меньшей мере, предоставления оценки истинного пространственного положения для полета вертолета, включающий в себя заданный уровень резервирования, примененный во внутреннем контуре; и
внешний контур автопилота, который выполнен с возможностью предоставления, по меньшей мере, одной функции навигации для полета вертолета, включающий в себя другой уровень резервирования, кроме резервирования внутреннего контура.
Концепция 2. Система автопилота по концепции 1, в которой упомянутый другой уровень резервирования для внутреннего контура больше, чем заданный уровень резервирования для внешнего внутреннего контура.
Концепция 3. Система автопилота по концепции 1 или 2, в которой внутренний контур дополнительно выполнен на основе тройных процессоров для тройного резервирования во внутреннем контуре.
Концепция 4. Система автопилота по концепции 3, в которой внутренний контур дополнительно выполнен так, что каждый из тройных процессоров одновременно генерирует сигнал управления электродвигателем.
Концепция 5. Система автопилота по концепции 4, в которой внутренний контур выполнен с возможностью приема команды управления из внешнего контура для каждого взаимодействия с внутренним контуром, как часть генерирования сигнала управления электродвигателем каждого тройного процессора.
Концепция 6. Система автопилота по любой одной из предыдущих концепций, в которой внешний контур выполнен с возможностью выполнения взаимно однозначной итерации с внутренним контуром.
Концепция 7. Система автопилота по концепции 4, в которой каждый тройной процессор выполнен с возможностью сравнения сигнала управления электродвигателем, генерируемого этим тройным процессором, с сигналом управления электродвигателем, который генерируется каждым из двух других процессоров из тройного процессора, и на основе сравнения подавать первый голос за или против первого одного из двух других процессоров из тройного процессора и второй голос за или против второго одного из двух других процессоров из тройного процессора.
Концепция 8. Система автопилота по концепции 7, в которой первый и второй из заданных одних из тройных процессоров каждый сообщается с передачей сигналов управления с, по меньшей мере, одним электродвигателем элемента привода, и третий тройной процессор генерирует упомянутый сигнал управления электродвигателем и выполняет упомянутое голосование, но третий тройной процессор не выполняет обмен данными управления с электродвигателем элемента привода.
Концепция 9. Система автопилота по концепции 7, включающая в себя менеджер голосования, который отключает сигнал управления электродвигателем, влияющий на любой конкретный один из тройных процессоров, когда голоса обоих из других двух тройных процессоров против конкретного тройного процессора для обозначения его неисправности.
Концепция 10. Система автопилота по концепции 9, в которой внутренний контур и внешний контур остаются полностью работоспособными при возникновении неисправности одного из тройных процессоров.
Концепция 11. Система автопилота по концепции 4, включающая в себя элемент привода тангажа и элемент привода крена для приложения воздействия на тангаж и воздействия на крен, соответственно, к соединению управления вертолетом, и каждый из этих элементов привода включает в себя резервный набор электродвигателей, включающий в себя, по меньшей мере, первый электродвигатель и второй электродвигатель, и первый тройной процессор генерирует сигналы управления электродвигателем первого процессора для управления первым электродвигателем элемента привода тангажа и первым электродвигателем элемента привода крена, и второй тройной процессор генерирует сигналы управления электродвигателем второго процессора, которые управляют вторым электродвигателем элемента привода тангажа и вторым электродвигателем элемента привода крена.
Концепция 12. Система автопилота по концепции 11, в которой элемент привода тангажа и элемент привода крена каждый включает в себя выходной вал, и каждый из которых выполнен таким образом, что либо один из первого и второго электродвигателей, и/или оба из первого электродвигателя и второго электродвигателя среди заданных одного из элементов привода могут вращать заданный выходной вал заданного элемента привода для обеспечения привода соединения управления.
Концепция 13. Система автопилота по концепции 1, в которой внутренний контур выполнен с тройными процессорами для обеспечения тройного резервирования во внутреннем контуре и дополнительно содержащий набор из тройных наборов датчиков таким образом, что каждый из тройных процессоров считывает один из наборов датчиков, который предназначен для этого одного тройного процессора, для получения данных датчиков.
Концепция 14. Система автопилота по концепции 13, в которой каждый тройной процессор выполнен с возможностью совместного использования данных датчика из специализированного одного из набора датчиков с другими двумя тройными процессорами.
Концепция 15. Система автопилота по концепции 14, в которой каждый тройной процессор выполнен с возможностью определения медианного набора данных датчиков на основе данных датчиков из всех тройных процессоров и для определения упомянутого сигнала управления электродвигателем на основе медианного набора данных датчиков.
Концепция 16. Система автопилота по концепции 15, в которой каждый тройной процессор выполнен с возможностью отбрасывать любые ошибочные данные датчика.
Концепция 17. Система автопилота по концепции 16, в которой каждый тройной процессор выполнен с возможностью идентификации ошибочных данных датчика на основе, по меньшей мере, частично, сравнения трех выходных сигналов датчиков с выходным сигналом каждого датчика, полученным данным датчиком каждого одного из наборов датчиков.
Концепция 18. Система автопилота по любой одной из предыдущих концепций, в которой внешний контур выполнен с возможностью работы на основе набора законов управления для конкретного вертолета.
Концепция 19. Система автопилота по любой одной из предыдущих концепций, в которой упомянутый вертолет включает в себя циклическое управление, и в котором система дополнительно содержит компоновку элемента привода для привода циклического контроля, для обеспечения упомянутого удержания положения в пространстве и упомянутой функции навигации.
Концепция 20. В системе автопилота для вертолета, способ, содержащий:
конфигурируют внутренний контур, по меньшей мере, для обеспечения удержания положения в пространстве для полета вертолета, включающего в себя заданный уровень резервирования, применяемый для внутреннего контура, и внешний контур автопилота для обеспечения, по меньшей мере, одной функции навигации в отношении полета вертолета, включающий в себя другой уровень резервирования, чем внутренний контур.
Концепция 21. В качестве части автопилота для обеспечения автоматического управления вертолетом путем привода одного или больше из элементов привода полета вертолета, компоновка привода, содержащая:
по меньшей мере, один электродвигатель, включающий в себя выходной вал и компоновку обмотки электродвигателя для приема тока возбуждения, который обеспечивает вращение выходного вала;
соединение элемента привода, которое функционально соединено между выходным валом электродвигателя и элементами управления полетом таким образом, что вращение выходного вала формирует соответствующее движение соединения элемента привода и элемента управления полетом; и
компоновку привода электродвигателя, которая во время работы подает упомянутый ток возбуждения от источника питания во время нормальной работы автопилота и, по меньшей мере, для замыкания накоротко компоновки обмотки электродвигателя, в соответствии с отказом источника питания, таким образом, что электродвигатель обеспечивает силу торможения для упомянутого соединения элемента привода, которая используется для стабилизации полета вертолета во время упомянутого отказа питания.
Концепция 22. Компоновка элемента привода по концепции 21, в которой компоновка возбуждения электродвигателя выполнена с возможностью электрического замыкания компоновки обмотки электродвигателя.
Концепция 23. Компоновка элемента привода по концепции 21 или 22, в которой компоновка привода электродвигателя включает в себя, по меньшей мере, один MOSFET, который выполнен с возможностью, по меньшей мере, мгновенного электрического соединения компоновки обмотки электродвигателя с заземлением вертолета в соответствии с отказом питания.
Концепция 24. Компоновка элемента привода по концепции 21, 22 или 23, включающая в себя конденсатор сохранения электроэнергии, который заряжается при нормальной работе упомянутого источника питания, и компоновка возбуждения электродвигателя выполнена с возможностью разряжать конденсатор сохранения электроэнергии при отказе источника питания таким образом, что выполняется смещение упомянутого MOSFET в состояние включено для, по меньшей мере, моментального соединения накоротко компоновки обмотки электродвигателя.
Концепция 25. Компоновка элемента привода по концепции 22, в которой электродвигатель включает в себя обмотку статора, включенную по схеме звезда, имеющую три фазные обмотки, и в которой компоновка возбуждения электродвигателя включает в себя группу MOSFET, которая установлена с возможностью совместно мгновенно замыкать фазные обмотки при отказе источника питания.
Концепция 26. Компоновка элемента привода по концепции 25, в которой группа MOSFET подключена таким образом, чтобы, по меньшей мере, мгновенно электрически замыкать каждую фазную обмотку на заземление вертолета при отказе питания.
Концепция 27. Компоновка элемента привода по концепции 25, включающая в себя конденсатор сохранения электроэнергии, который заряжается при нормальной работе упомянутого источника питания, и компоновка элемента привода выполнена с возможностью разряда конденсатора сохранения энергии при отказе источника питания таким способом, который смещает каждый MOSFET упомянутой группы в состояние включено для, по меньшей мере, мгновенного короткого замыкания фазных обмоток.
Концепция 28. Компоновка элемента привода по любой одной из предыдущих концепций, в которой компоновка привода электродвигателя включает в себя, по меньшей мере, одно электромагнитное реле, которое выполнено с возможностью электрического замыкания компоновки обмотки электродвигателя при отказе электропитания.
Концепция 29. Компоновка элемента привода по концепции 28, в которой электромагнитное реле включает в себя, по меньшей мере, один нормально замкнутый контакт, который выполнен с возможностью электрического соединения обмотки электродвигателя с заземлением вертолета при отказе источника питания.
Концепция 30. Способ управления электродвигателем элемента привода, который формирует часть системы автопилота вертолета, которая обеспечивает автоматическое управление вертолетом, упомянутый электродвигатель элемента привода, включающий в себя выходной вал, который функционально соединяется с элементом управления полетом вертолета, и компоновку обмотки электродвигателя для приема тока возбуждения, который обеспечивает вращение выходного вала, для активации элемента управления полетом, упомянутый способ, содержащий:
конфигурируют компоновку возбуждения привода электродвигателя для подачи упомянутого тока возбуждения от источника питания во время нормальной работы автопилота и, по меньшей мере, для короткого замыкания компоновки обмотки электродвигателя при отказе источника питания таким образом, что электродвигатель обеспечивает силу торможения на упомянутом соединении элемента привода, который используется для стабилизации полета вертолета во время упомянутого отказа питания.
Концепция 31. Система автопилота для вертолета, упомянутый вертолет, включающий в себя модуль GPS, который обеспечивает выходные данные GPS, упомянутая система автопилота, содержащая:
компоновку датчика, которая предназначена для автопилота и которая передает набор выходных данных датчика, для характеризации полета вертолета;
компоновку управления, которая принимает выходные данные GPS и выходные данные датчика и генерирует сигналы электрического привода в ответ на них; и
элемент привода, который выполнен электромеханическим и принимает упомянутые электрические сигналы привода, и генерирует механический отклик управления, в ответ на них, которые механически соединены с вертолетом для обеспечения автоматического управления полетом вертолета, без необходимости привлечения гидравлической системы вертолета.
Концепция 32. Система автопилота по концепции 31, в которой упомянутый элемент привода соединяет выходы управления с системой управления циклическим шагом вертолета, параллельно с любыми воздействиями пилота, которые прикладываются к системе управления циклическим шагом.
Концепция 33. Система автопилота по концепции 31 или 32, в которой компоновка управления включает в себя внешний контур управления, который выполнен с возможностью предоставления, по меньшей мере, одной функции навигации в отношении полета вертолета, и внутренний контур управления, который выполнен с возможностью, по меньшей мере, обеспечения удержания положения в пространстве для полета вертолета.
Концепция 34. Система автопилота по концепции 33, в которой внутренний контур включает в себя набор из трех тройных процессоров для обеспечения тройного резервирования при генерировании упомянутых сигналов электрического привода, при этом каждый тройной процессор генерирует сигналы управления креном и сигналы управления тангажом.
Концепция 35. Система автопилота по концепции 34, в которой первый один из и второй один из тройных процессоров вырабатывают сигналы управления креном для элемента привода креном и сигналы управления тангажом для элемента привода тангажа, и третий тройной процессор не предоставляет сигналы управления креном и управления тангажом в элемент привода.
Концепция 36. Система автопилота по концепции 34, в которой внутренний контур дополнительно выполнен таким образом, что каждый тройной процессор одновременно генерирует, по меньшей мере, один сигнал управления электродвигателем.
Концепция 37. Система автопилота по концепции 36, в которой внутренний контур выполнен с возможностью приема команды управления от внешнего контура для каждой итерации внутреннего контура, как часть генерирования сигнала управления электродвигателем каждого тройного процессора.
Концепция 38. Система автопилота по любой одной из концепций 33-37, в которой внешний контур выполнен с возможностью выполнения взаимно однозначной итерации с внутренним контуром.
Концепция 39. Система автопилота по концепции 36, включающая в себя элемент привода тангажа и элемент привода крена для приложения воздействия по тангажу и воздействия по крену, соответственно, к соединению управления вертолетом, и каждый из этих элементов привода включает в себя резервный набор электродвигателя, включающий в себя первый электродвигатель и второй электродвигатель, и первый из трех процессоров генерирует первые сигналы процессора для управления электродвигателем, для управления первым электродвигателем элемента привода тангажом, и первый электродвигатель элемента крена, и второй из трех процессоров генерирует вторые сигналы процессора для управления электродвигателем, которые управляют вторым электродвигателем элемента привода тангажом и вторым электродвигателем элемента привода крена.
Концепция 40. Система автопилота по концепции 39, в которой элемент привода тангажом и элемент привода креном каждый включает в себя выходной вал и каждый из которых выполнен таким образом, что любой один из первого и второго электродвигателя и/или оба из первого электродвигателя и второго электродвигателя заданного одного из элементов привода могут вращать заданный выходной вал заданного элемента привода, для обеспечения воздействий по соединению управления.
Концепция 41. Система автопилота по концепции 40, в которой выходной вал каждого из элемента привода тангажа и элемента привода крена может обеспечить, по меньшей мере, 300 фунтов силы для соединения управления вертолетом.
Концепция 42. Система автопилота по любой из концепций 31-41, в которой упомянутый вертолет включает в себя циклическое управление, и в которой упомянутый элемент привода обеспечивает механическое воздействие для активации циклического управления.
Концепция 43. Система автопилота для вертолета, которая включает в себя гидравлическую вспомогательную систему, которая принимает входные воздействия управления полетом от пилота и, в свою очередь, формирует механические выходные воздействия, которые механически соединены с вертолетом, для обеспечения для пилота управления вертолетом, упомянутая система автопилота, содержащая:
компоновку датчика, которая формирует набор выходных сигналов датчика, которые характеризуют полет вертолета;
компоновку управления, которая принимает выходные сигналы датчика и генерирует сигналы электрического привода; и
компоновку элементов привода, которая выполнена электромеханической и принимает упомянутые электрические сигналы привода для генерирования выходных сигналов управления в ответ на это, и которая механически соединена с гидравлической вспомогательной системой и которая выполнена с возможностью взаимодействия с компоновкой управления для обеспечения автоматического управления полетом вертолета в первом, нормальном режиме, с гидравлической вспомогательной системой в нормальном рабочем состоянии, и во втором режиме отказа, когда гидравлическая вспомогательная система находится в состоянии отказа, для обеспечения автоматического управления полетом вертолета в каждом из нормального режима и режима с отказом.
Концепция 44. Система автопилота по концепции 43, в которой упомянутая компоновка датчика выполнена с возможностью определения рабочего состояния гидравлической вспомогательной системы в качестве одного из нормального режима и режима с отказом, и упомянутая компоновка управления генерирует электрические сигналы привода на основе первого, нормального набора параметров, в соответствии с детектированием нормального режима, и второго набора параметров с отказом при детектировании режима отказа гидравлической системы.
Концепция 45. Система автопилота по концепциям 43 или 44, в которой отказ гидравлической вспомогательной системы формирует мертвую зону для механических входных сигналов управления, подаваемых в нее, и в которой набор параметров при отказе сконфигурирован для, по меньшей мере, компенсации мертвой зоны.
Концепция 46. Система автопилота по концепциям 43, 44 или 45, в которой упомянутая компоновка элементов привода соединяет выходные сигналы управления с управлением циклическим шагом вертолетом параллельно с любым воздействием пилота, которое прикладывается к управлению циклическим шагом.
Концепция 47. Система автопилота по любой одной из концепций 43-46, в которой упомянутый вертолет включает в себя управление циклическим шагом, которым управляют с помощью упомянутой гидравлической вспомогательной системы, и в которой упомянутая компоновка элемента привода обеспечивает механические входные сигналы для активации гидравлической вспомогательной системы.
Концепция 48. Способ для управления вертолетом, включающий в себя гидравлическую вспомогательную систему, которая выполнена, по меньшей мере, для активации системы ротора и вертолета, упомянутый способ, содержащий:
генерируют сигналы электрического управления автопилотом, в соответствии с полетом вертолета; и
конфигурируют электромеханическую компоновку элемента привода для приема электрических сигналов управления и для соединения механических входных сигналов управления с гидравлической вспомогательной системой на основе электрических сигналов управления автопилота, для взаимодействия с компоновкой управления, для обеспечения автоматического управления полетом вертолета в первом, нормальном режиме с гидравлической вспомогательной системой в нормальном рабочем состоянии и во втором режиме с отказом, в котором гидравлическая вспомогательная система находится в состоянии работы с отказом, для обеспечения автоматического управления полетом вертолета в каждом из нормального режима и режима с отказом.
Концепция 49. Способ по концепции 48, дополнительно содержащий: определяют статус работы гидравлической вспомогательной системы, как один из нормального режима и режима с отказом, и генерируют электрические сигналы управления на основе первого, нормального набора параметров при детектировании нормального режима и второго набора параметров с отказом при детектировании режима с отказом гидравлической вспомогательной системы.
Концепция 50. Способ по концепции 49, в котором отказ гидравлической вспомогательной системы формирует мертвую зону для механических входных сигналов управления, прикладываемых в ней, и способ включает в себя: конфигурируют набор параметров с отказом для, по меньшей мере, компенсации мертвой зоны.
Концепция 51. Способ по концепциям 48,49 или 50, включающий в себя соединение выходных воздействий управления с управлением циклическим шагом вертолета параллельно с любыми воздействиями пилота, которые прикладываются к управлению циклическим шагом.
Концепция 52. Система автопилота по концепциям 48, 49, 50 или 51, в которой упомянутый вертолет включает в себя управление циклическим шагом, которым управляют с помощью упомянутой гидравлической вспомогательной системы, и в котором упомянутая компоновка элемента привода выполнена с возможностью предоставления механических входных воздействий для активации гидравлической вспомогательной системы.
Концепция 53. Система управления полетом для избирательного автоматического управления горизонтальным полетом вертолета, причем полет вертолета отличается набором параметров ориентации, включающих в себя ориентацию тангажа, ориентацию крена и ориентацию рыскания, упомянутая система, содержащая:
трехосевой датчик скорости MEMS, установленный на упомянутом вертолете для генерирования сигнала скорости крена, сигнала скорости тангажа и сигнала скорости рыскания, которые реагируют на изменения упомянутой ориентации крена, ориентации тангажа и ориентации рыскания, соответственно;
трехосевой акселерометр MEMS для генерирования сигналов акселерометра, в соответствии с упомянутым горизонтальным полетом;
приемник GPS, установленный на упомянутом вертолете, для генерирования сигнала курса, сигнала высоты и сигнала скорости, в соответствии с горизонтальным полетом вертолета; трехосевой магнитометр, для генерирования сигналов магнитометра;
контроллер, установленный на упомянутом вертолете, для приема набора входных сигналов, состоящих из сигнала скорости тангажа, сигнала скорости крена, сигнала скорости рыскания, сигналов акселерометра, сигналов курса, сигналов магнитометра, сигнала скорости и сигнала высоты, для определения истинного пространственного положения вертолета и генерирования набора сигналов управления для поддержания стабильной ориентации при горизонтальном полете вертолета, в соответствии с выбранным курсом, определенным по земле и на выбранной высоте; и компоновка привода, которая принимает набор сигналов управления, для регулирования горизонтального полета вертолета на основе набора сигналов управления.
Концепция 54. Система по концепции 53, в которой упомянутый приемник GPS включает в себя не более, чем одну антенну GPS.
Концепция 55. Система управления полетом для избирательного автоматического управления горизонтальным полетом вертолета, причем горизонтальный полет характеризуется набором параметров ориентации, включающих в себя ориентацию тангажа, ориентацию крена и ориентацию рыскания, упомянутая система, содержащая:
трехосевой датчик скорости MEMS, установленный на упомянутом вертолете, для генерирования сигнала скорости крена, сигнала скорости тангажа и сигнала скорости рыскания, которые возникают при изменении упомянутой ориентации крена, ориентации тангажа и ориентации рыскания, соответственно;
трехосевой акселерометр MEMS для генерирования сигналов акселерометра, в соответствии с упомянутым горизонтальным полетом;
приемник GPS, установленный на упомянутом вертолете для генерирования сигнала курса и сигнала скорости, в соответствии с горизонтальным полетом вертолета;
трехосевой магнитометр для генерирования сигналов магнитометра;
контроллер, установленный на упомянутом вертолете для приема набора входных сигналов, состоящих из сигнала скорости тангажа, сигнала скорости крена, сигнала скорости рыскания, сигналов ускорения, сигнала курса и сигнала скорости, для определения истинного пространственного положения вертолета и для генерирования набора сигналов управления, для поддержания стабильной ориентации при горизонтальном полете вертолета, в соответствии с выбранным курсом, определенным по земле и выбранной скоростью для выбранного курса; и
компоновку привода приема набора сигналов управления для регулирования горизонтального полета вертолета на основе набора сигналов управления.
Концепция 56. Система управления полетом для избирательного автоматического управления полетом вертолета, которая выполнена с возможностью полета при зависании, причем такое зависание характеризуется набором параметров ориентации, включающим в себя ориентацию тангажа, ориентацию крена, ориентацию рыскания и положение над грунтом, упомянутая система, содержащая:
компоновку датчиков MEMS, установленную на упомянутом вертолете для генерирования сигнала скорости тангажа, который соответствует изменениям упомянутой ориентации тангажа и сигнала скорости крена, который соответствует изменениям упомянутой ориентации крена, сигнала скорости рыскания, который соответствует упомянутой ориентации рыскания, и сигналов ускорения, соответствующих упомянутому зависанию;
трехосевой акселерометр MEMS, для генерирования сигналов акселерометра, в соответствии с упомянутым горизонтальным полетом;
магнитометр для генерирования сигналов магнитного направления;
приемник GPS, установленный на упомянутом вертолете для генерирования сигнала положения, сигнала курса и сигнала скорости, в соответствии с зависанием вертолета;
компоновку обработки, установленную на упомянутом вертолете, для приема набора входных сигналов, состоящих из сигнала скорости тангажа, сигнала скорости крена, сигнала рыскания, сигналов ускорения, сигнала положения, сигнала курса, сигнала скорости и сигнала магнитного направления, для определения истинного пространственного положения вертолета и для генерирования набора сигналов управления, для поддержания стабильного зависания вертолета, в соответствии с выбранным положением зависания; и
компоновку элементов привода для приема набора сигналов управления, для регулирования зависания вертолета на основе набора сигналов управления.
Концепция 57. Система автопилота для вертолета, упомянутая система автопилота, содержащая:
внутренний контур, который выполнен, по меньшей мере, для предоставления истинного пространственного положения для полета вертолета, включающего в себя заданный уровень избыточности, прикладываемой для внутреннего контура; и
внешний контур автопилота, который выполнен с возможностью предоставления, по меньшей мере, одной навигационной функции в отношении полета вертолета, и в котором внутренний контур и внешний контур, каждый сконфигурирован с тройными процессорами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОПИЛОТА, КОМПОНЕНТЫ И СПОСОБЫ | 2013 |
|
RU2652685C2 |
| СИСТЕМА И СПОСОБЫ УПРАВЛЕНИЯ С ПОМОЩЬЮ АВТОПИЛОТА | 2013 |
|
RU2623792C2 |
| АВТОПИЛОТ ДЛЯ САМОЛЕТОВ МАЛОЙ АВИАЦИИ | 2024 |
|
RU2832351C1 |
| СПОСОБ ОПЕРАТИВНОГО КОНТРОЛЯ ПАРАМЕТРОВ И ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ УЗЛОВ МАЛОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (БПЛА) | 2022 |
|
RU2803903C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ УПРАВЛЕНИЯ ПОЛЁТОМ ВЕРТОЛЁТА | 2002 |
|
RU2220073C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ САМОЛЕТОМ В СЛУЧАЕ НЕДЕЕСПОСОБНОСТИ ЭКИПАЖА | 2011 |
|
RU2612549C2 |
| СИСТЕМА ПОДВОДНАЯ РАЗВЕДЫВАТЕЛЬНО-УДАРНАЯ ТРАНСФОРМИРУЕМАЯ | 2019 |
|
RU2725567C1 |
| Комплекс бортового оборудования вертолетов и самолетов авиации общего назначения | 2016 |
|
RU2640076C2 |
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ РАЗЛИЧНОГО НАЗНАЧЕНИЯ | 2016 |
|
RU2718460C1 |
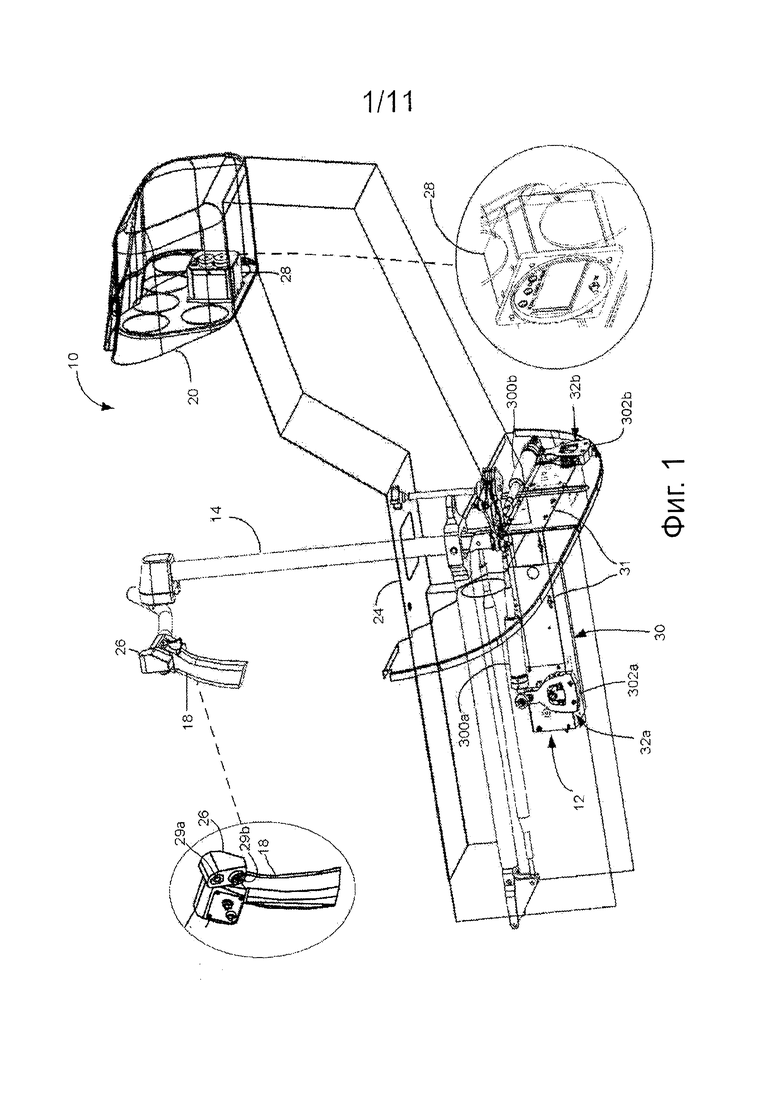
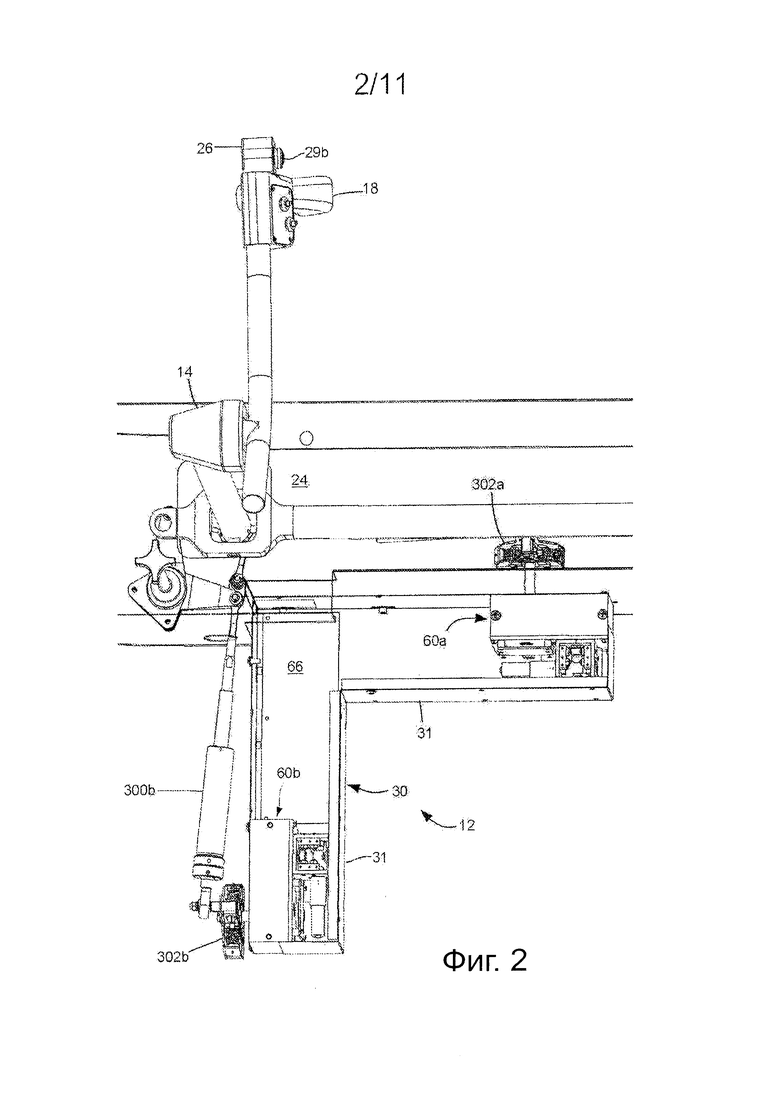
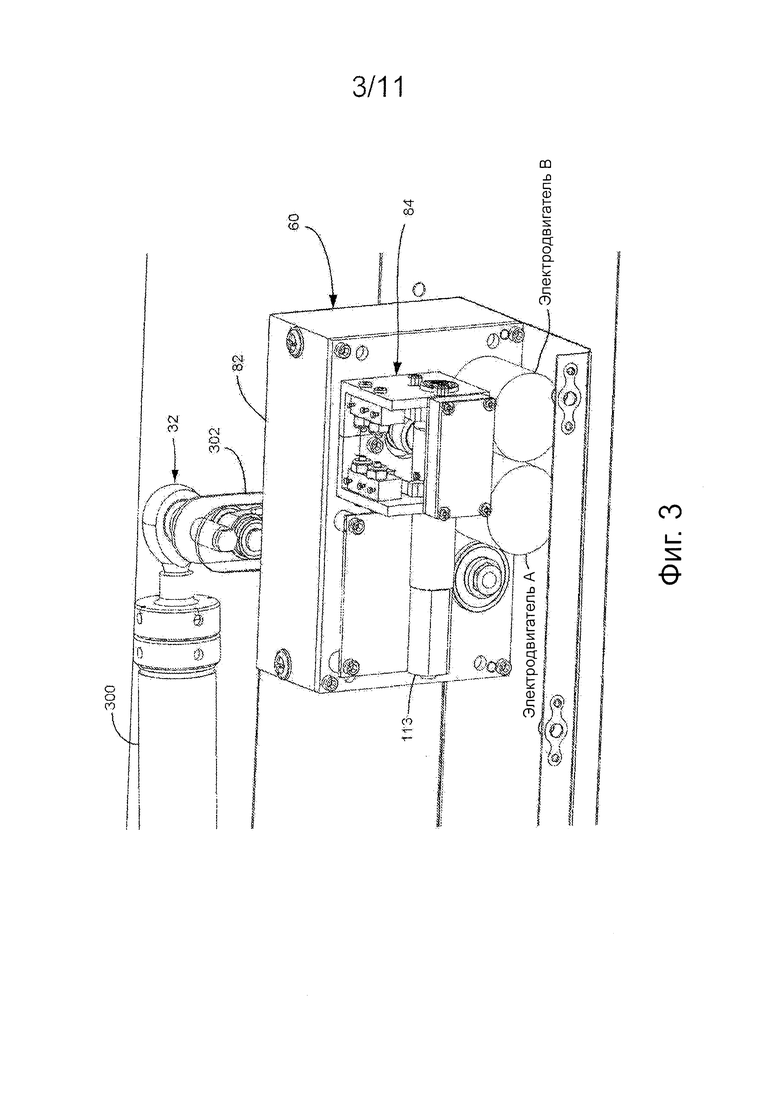
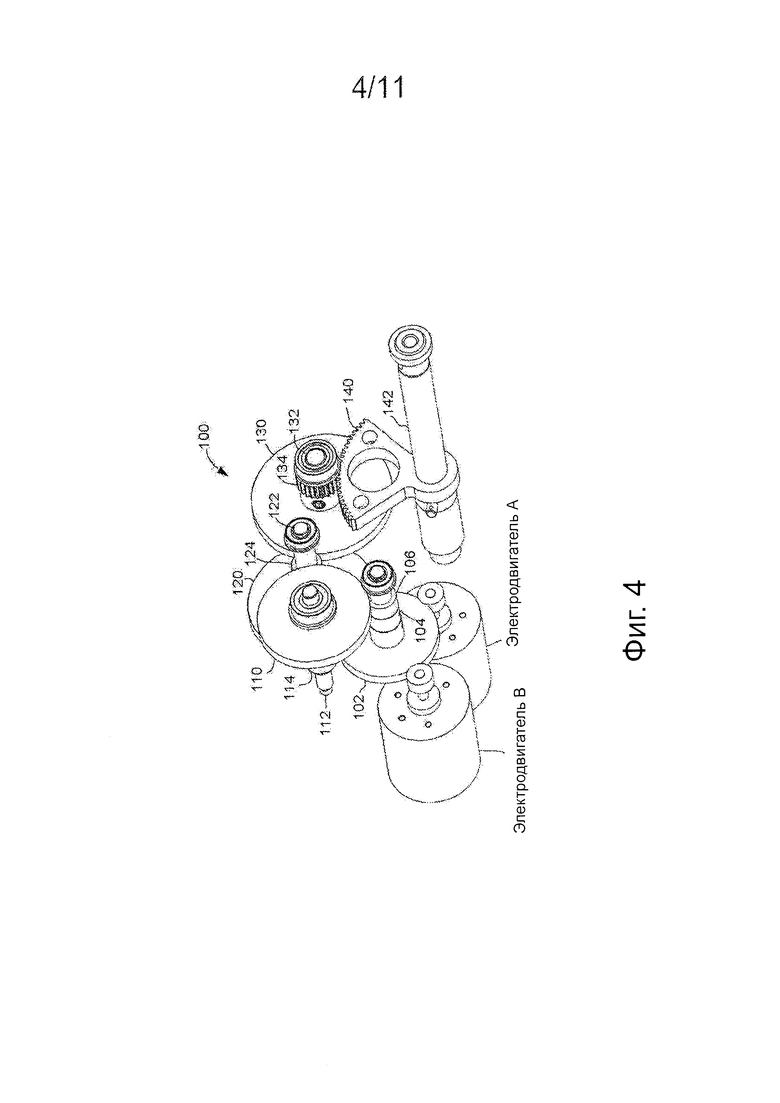
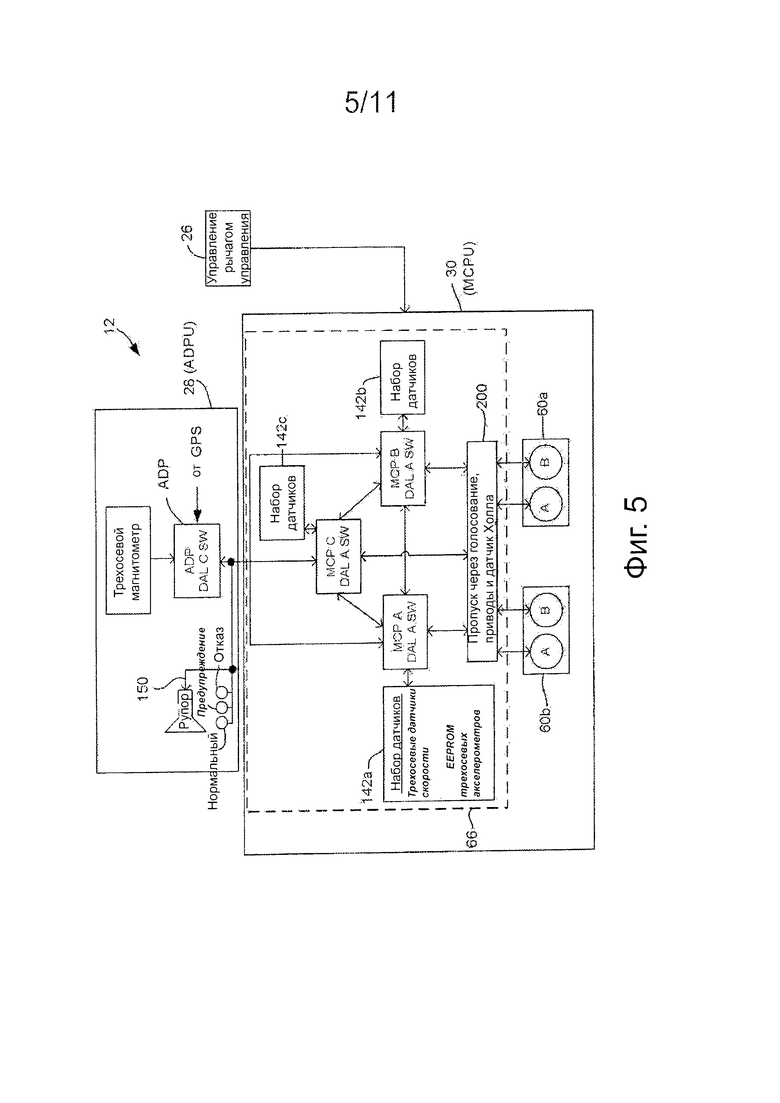
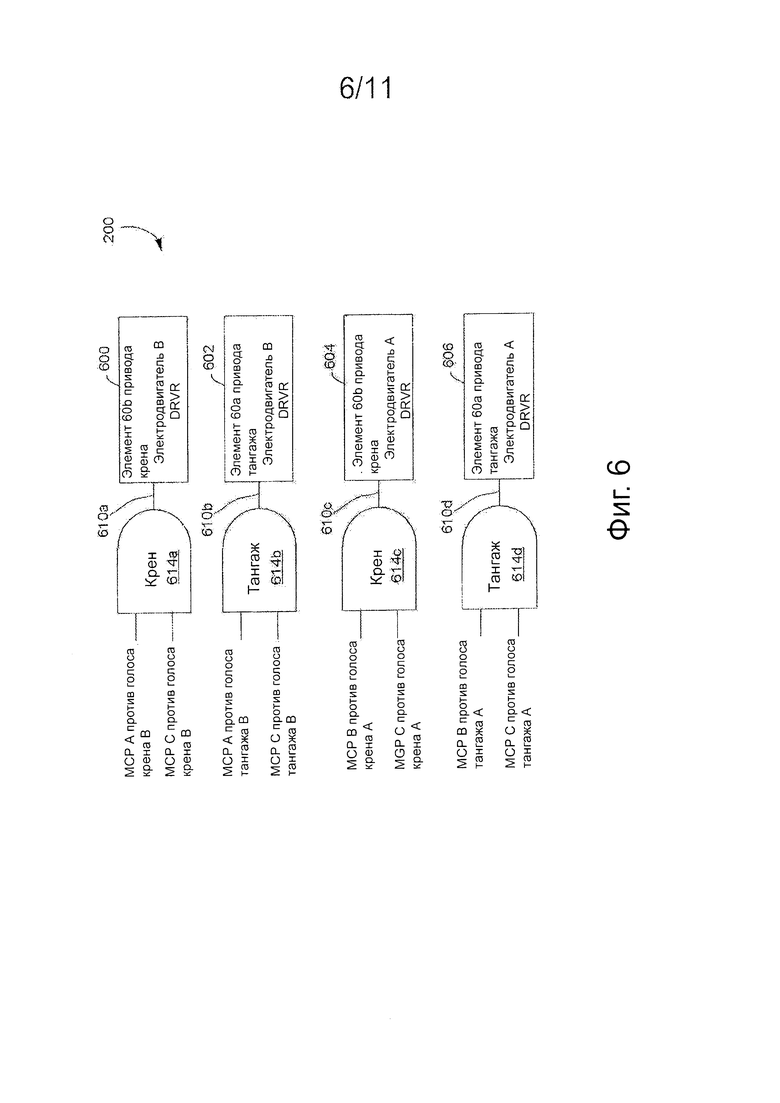
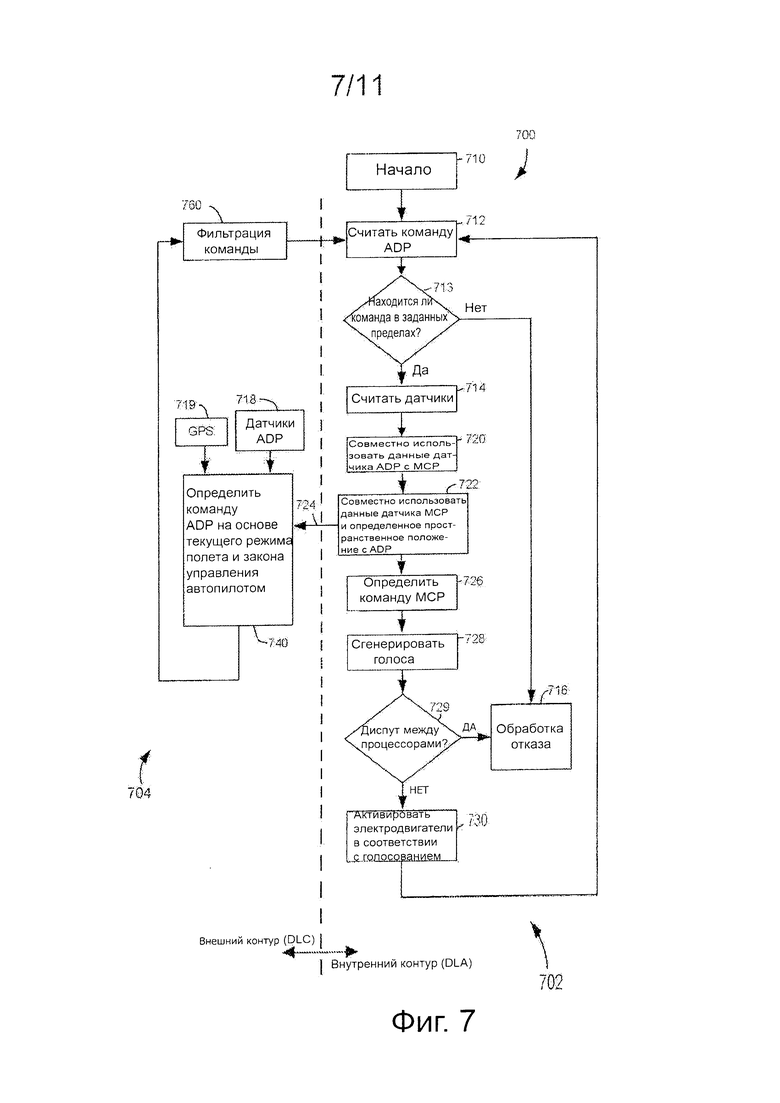
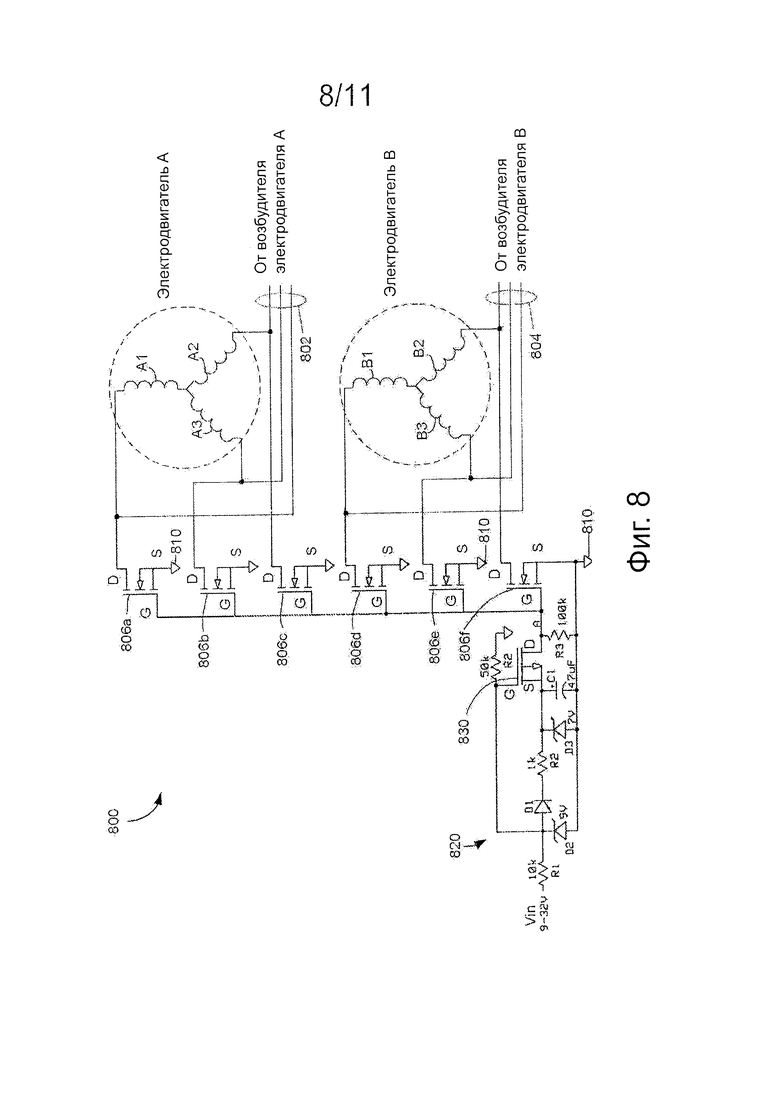
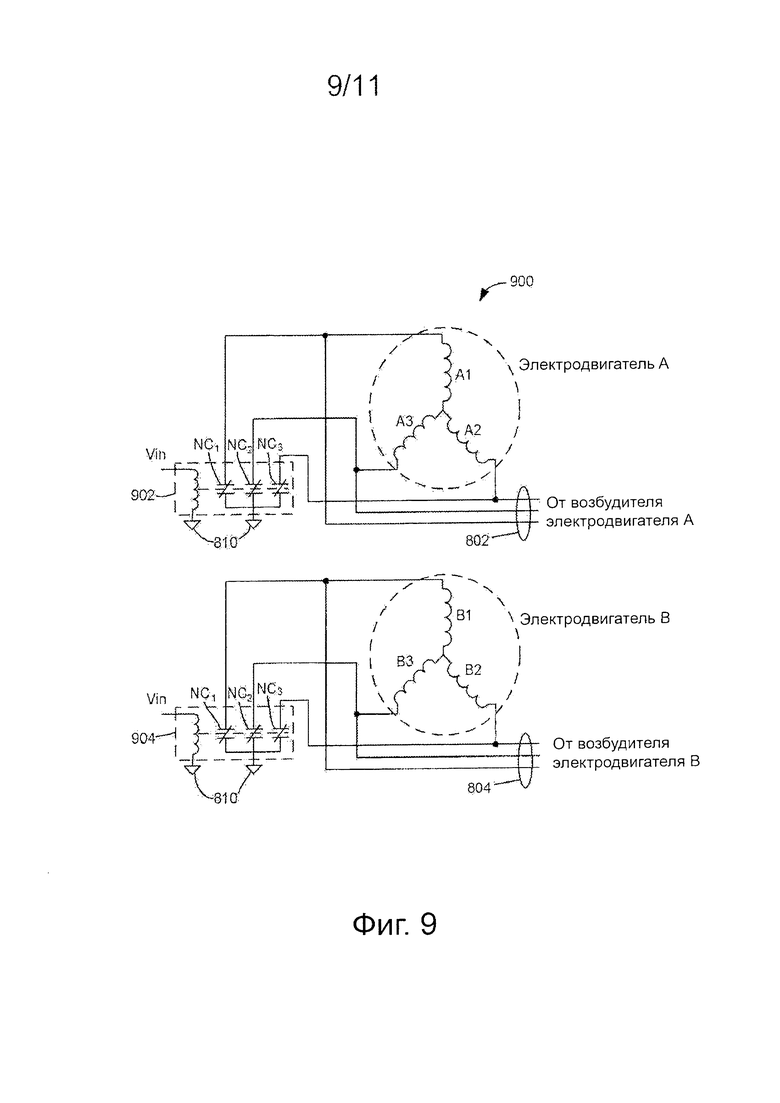
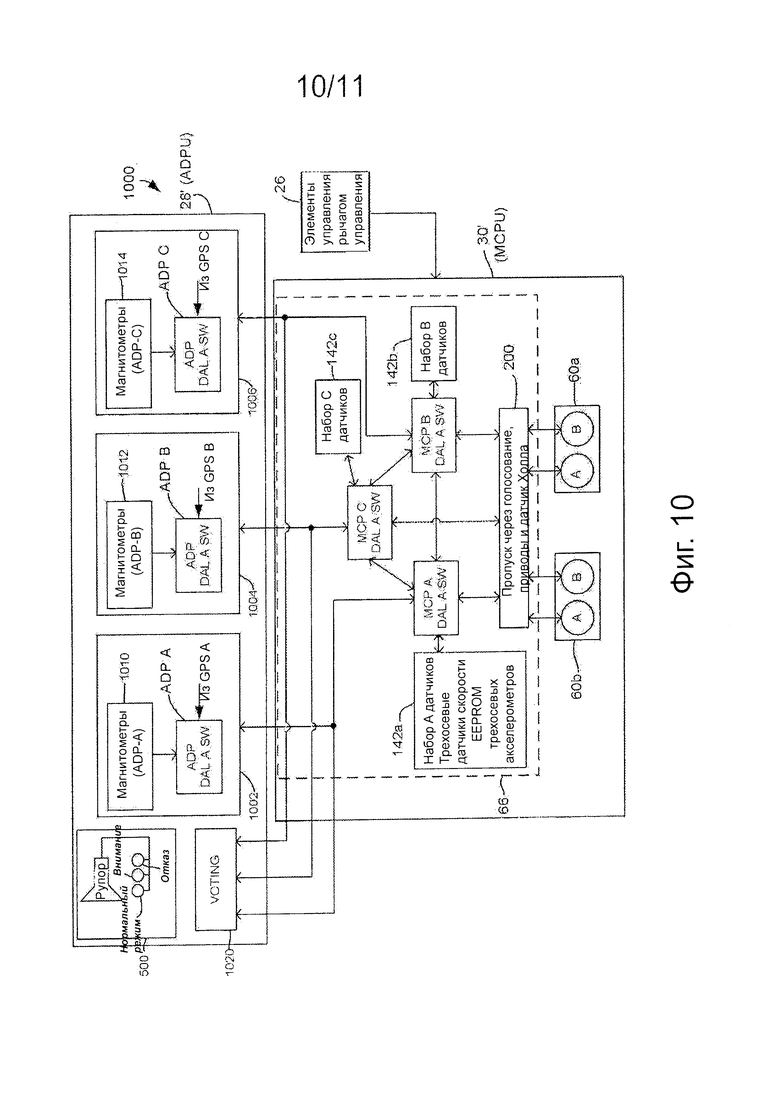
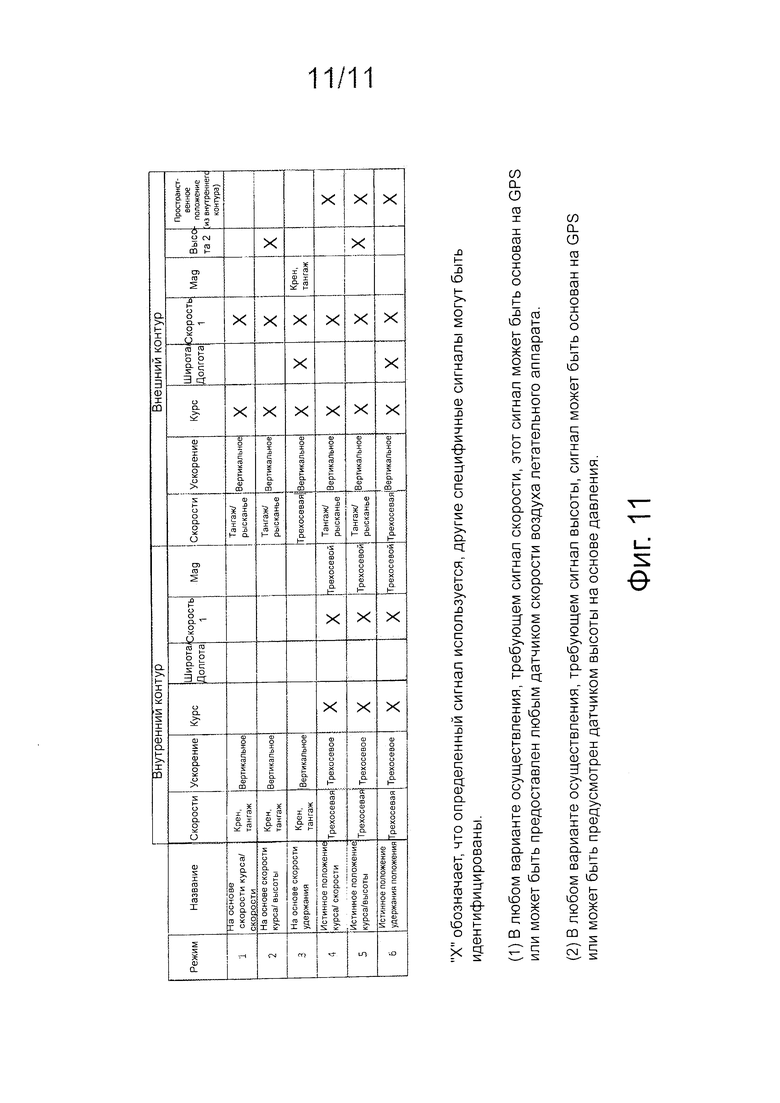
Изобретение относится к области авиации, в частности к конструкциям и способам управления вертолетами. Система автопилота вертолета включает в себя внутренний контур для поддержания пространственного положения для полета вертолета, включающая в себя заданный уровень резервирования, приложенный к внутреннему контуру. Внешний контур выполнен с возможностью предоставления функции навигации относительно полета вертолета, включающей в себя другой уровень резервирования, чем уровень резервирования внутреннего контура. Элемент привода прикладывает силу торможения к соединению, которое используется для стабилизации полета вертолета во время отказа при полете. Элемент привода выполнен электромеханическим и принимает сигналы электрического привода для обеспечения автоматического управления полетом вертолета без необходимости использования гидравлической вспомогательной системы в вертолете. Автопилот может управлять вертолетом в режиме с отказом гидравлической вспомогательной системы. Множество режимов полета описано с соответствующими входными сигналами датчиков, включающими в себя сигналы на основе скорости, и тремя режимами пространственного положения. Достигается возможность создания упрощенных систем автоматического управления для легких вертолетов. 11 н. и 40 з.п. ф-лы, 11 ил.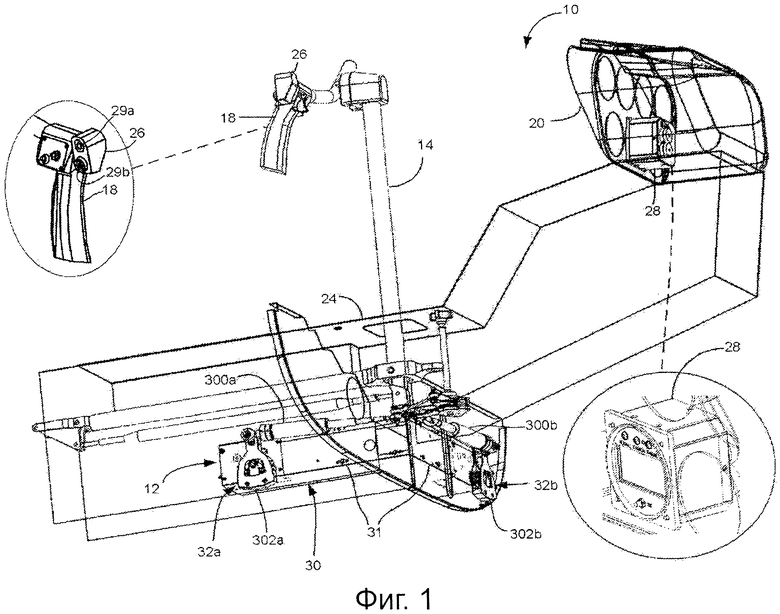
1. Автопилот вертолета, содержащий:
внутренний контур, который выполнен с возможностью по меньшей мере предоставления оценки истинного пространственного положения для полета вертолета, включающий в себя заданный уровень резервирования, примененный во внутреннем контуре; и
внешний контур автопилота, который выполнен с возможностью предоставления по меньшей мере одной функции навигации для полета вертолета, включающий в себя другой уровень резервирования, отличный от уровня резервирования внутреннего контура.
2. Автопилот по п. 1, в котором упомянутый другой уровень резервирования для внутреннего контура больше, чем заданный уровень резервирования для внешнего внутреннего контура.
3. Автопилот по п. 2, в котором внутренний контур выполнен на основе тройных процессоров для тройного резервирования во внутреннем контуре.
4. Автопилот по п. 3, в котором внутренний контур дополнительно выполнен так, что каждый из тройных процессоров одновременно генерирует сигнал управления электродвигателем.
5. Автопилот по п. 4, в котором внутренний контур выполнен с возможностью приема команды управления от внешнего контура для каждой итерации внутреннего контура как часть генерирования сигнала управления электродвигателем каждого тройного процессора.
6. Автопилот по п. 5, в котором внешний контур выполнен с возможностью выполнения взаимно однозначной итерации с внутренним контуром.
7. Автопилот по п. 4, в котором каждый тройной процессор выполнен с возможностью сравнения сигнала управления электродвигателем, генерируемого этим тройным процессором, с сигналом управления электродвигателем, который генерируется каждым из двух других тройных процессоров, и на основе сравнения подавать первый голос за или против первого одного из двух других тройных процессоров и второй голос за или против второго одного из двух других тройных процессоров.
8. Автопилот по п. 7, в котором каждый из первого и второго заданных процессоров из тройных процессоров сообщается с передачей сигналов управления с по меньшей мере одним электродвигателем элемента привода, и третий тройной процессор генерирует упомянутый сигнал управления электродвигателем и выполняет упомянутое голосование, но третий тройной процессор не выполняет обмен данными управления с электродвигателем элемента привода.
9. Автопилот по п. 7, содержащий менеджер голосования, который отключает сигнал управления электродвигателем, влияющий на любой конкретный один из тройных процессоров, когда голоса обоих из других двух тройных процессоров против конкретного тройного процессора для обозначения его неисправности.
10. Автопилот по п. 9, в котором внутренний контур и внешний контур остаются полностью работоспособными при возникновении неисправности одного из тройных процессоров.
11. Автопилот по п. 4, содержащий элемент привода тангажа и элемент привода крена для приложения воздействия на тангаж и воздействия на крен соответственно к соединению управления вертолетом, и каждый из этих элементов привода включает в себя резервный набор электродвигателей, включающий в себя по меньшей мере первый электродвигатель и второй электродвигатель, и первый тройной процессор генерирует сигналы управления электродвигателем первого процессора для управления первым электродвигателем элемента привода тангажа и первым электродвигателем элемента привода крена, и второй тройной процессор генерирует сигналы управления электродвигателем второго процессора, которые управляют вторым электродвигателем элемента привода тангажа и вторым электродвигателем элемента привода крена.
12. Автопилот по п. 11, в котором каждый из элемента привода тангажа и элемента привода крена включает в себя выходной вал и каждый из которых выполнен таким образом, что либо один из первого и второго электродвигателей и/или оба из первого электродвигателя и второго электродвигателя заданного одного из элементов привода могут вращать заданный выходной вал заданного элемента привода для обеспечения привода соединения управления.
13. Автопилот по п. 1, в котором внутренний контур выполнен с тройными процессорами для обеспечения тройного резервирования во внутреннем контуре и дополнительно содержит набор из тройных наборов датчиков таким образом, что каждый из тройных процессоров считывает один из наборов датчиков, который предназначен для этого одного тройного процессора, для получения данных датчиков.
14. Автопилот по п. 13, в котором каждый тройной процессор выполнен с возможностью совместного использования данных датчика из специализированного одного из набора датчиков с другими двумя тройными процессорами.
15. Автопилот по п. 14, в котором каждый тройной процессор выполнен с возможностью определения медианного набора данных датчиков на основе данных датчиков из всех тройных процессоров и для определения упомянутого сигнала управления электродвигателем на основе медианного набора данных датчиков.
16. Автопилот по п. 15, в котором каждый тройной процессор выполнен с возможностью отбрасывать любые ошибочные данные датчика.
17. Автопилот по п. 16, в котором каждый тройной процессор выполнен с возможностью идентификации ошибочных данных датчика на основе по меньшей мере частичного сравнения трех выходных сигналов датчиков с выходным сигналом каждого датчика, полученным данным датчиком каждого одного из наборов датчиков.
18. Автопилот по п. 1, в котором внешний контур выполнен с возможностью работы на основе набора законов управления для конкретного вертолета.
19. Автопилот по п. 1, в котором упомянутый вертолет включает в себя циклическое управление и который дополнительно содержит компоновку элемента привода для привода циклического контроля для обеспечения упомянутого удержания положения в пространстве и упомянутой функции навигации.
20. Способ функционирования автопилота вертолета, при котором:
конфигурируют внутренний контур по меньшей мере для обеспечения удержания положения в пространстве для полета вертолета, включающий в себя заданный уровень резервирования, применяемый для внутреннего контура, и внешний контур автопилота для обеспечения по меньшей мере одной функции навигации в отношении полета вертолета, включающий в себя другой уровень резервирования, отличный от уровня резервирования внутреннего контура.
21. Компоновка привода для автопилота для обеспечения автоматического управления вертолетом путем привода одного или больше из элементов привода полета вертолета, содержащая:
по меньшей мере один электродвигатель, включающий в себя выходной вал и компоновку обмотки электродвигателя для приема тока возбуждения, который обеспечивает вращение выходного вала;
соединение элемента привода, которое функционально соединено между выходным валом электродвигателя и элементами управления полетом таким образом, что вращение выходного вала формирует соответствующее движение соединения элемента привода и элемента управления полетом;
компоновку привода электродвигателя, которая во время работы подает упомянутый ток возбуждения от источника питания во время нормальной работы автопилота и по меньшей мере для замыкания накоротко компоновки обмотки электродвигателя в соответствии с отказом источника питания таким образом, что электродвигатель обеспечивает силу торможения для упомянутого соединения элемента привода, которая используется для стабилизации полета вертолета во время упомянутого отказа питания;
при этом компоновка привода электродвигателя включает в себя по меньшей мере один MOSFET, который выполнен с возможностью по меньшей мере мгновенного электрического соединения компоновки обмотки электродвигателя с заземлением вертолета в соответствии с отказом питания;
конденсатор сохранения электроэнергии, который заряжается при нормальной работе упомянутого источника питания, при этом компоновка возбуждения электродвигателя выполнена с возможностью разряжать конденсатор сохранения электроэнергии при отказе источника питания таким образом, что выполняется смещение упомянутого MOSFET в состояние включено для по меньшей мере моментального соединения накоротко компоновки обмотки электродвигателя.
22. Компоновка по п. 21, в которой электродвигатель включает в себя обмотку статора, включенную по схеме звезда, имеющую три фазные обмотки, при этом компоновка возбуждения электродвигателя включает в себя группу MOSFET, включающую в себя упомянутый по меньшей мере один MOSFET, упомянутая группа MOSFET установлена с возможностью совместно мгновенно замыкать фазные обмотки при отказе источника питания.
23. Компоновка по п. 22, в которой группа MOSFET подключена таким образом, чтобы по меньшей мере мгновенно электрически замыкать каждую фазную обмотку на заземление вертолета при отказе питания.
24. Компоновка по п. 22, которая выполнена с возможностью разряда конденсатора сохранения энергии при отказе источника питания таким способом, который смещает каждый MOSFET упомянутой группы в состояние включено для по меньшей мере мгновенного короткого замыкания фазных обмоток.
25. Способ управления электродвигателем элемента привода, который формирует часть системы автопилота вертолета, которая обеспечивает автоматическое управление вертолетом, причем упомянутый электродвигатель элемента привода включает в себя выходной вал, который функционально соединяется с элементом управления полетом вертолета, и компоновку обмотки электродвигателя для приема тока возбуждения, который обеспечивает вращение выходного вала для активации элемента управления полетом, при котором:
конфигурируют компоновку возбуждения привода электродвигателя для подачи упомянутого тока возбуждения от источника питания во время нормальной работы автопилота и по меньшей мере для короткого замыкания компоновки обмотки электродвигателя при отказе источника питания таким образом, что электродвигатель обеспечивает силу торможения на упомянутом соединении элемента привода, который используется для стабилизации полета вертолета во время упомянутого отказа питания;
в котором упомянутое конфигурирование включает в себя этапы, на которых:
размещают по меньшей мере один MOSFET для по меньшей мере мгновенного электрического соединения компоновки обмотки электродвигателя с заземлением вертолета в соответствии с отказом питания; и
размещают конденсатор сохранения электроэнергии, который заряжается при нормальной работе упомянутого источника питания, и
конфигурируют компоновку возбуждения привода электродвигателя для разряда конденсатора сохранения электроэнергии в соответствии с отказом источника питания таким образом, что выполняется смещение упомянутого MOSFET в состояние включено для по меньшей мере моментального соединения накоротко компоновки обмотки электродвигателя.
26. Автопилот вертолета, включающего в себя модуль GPS, который обеспечивает выходные данные GPS, содержащий:
компоновку датчика, которая предназначена для автопилота и которая передает набор выходных данных датчика для характеризации полета вертолета;
компоновку управления, которая принимает выходные данные GPS и выходные данные датчика и генерирует сигналы электрического привода в ответ на них; и
элемент привода, который выполнен электромеханическим и принимает упомянутые электрические сигналы привода, чтобы генерировать механический отклик управления в ответ на них, которые механически соединены с вертолетом для обеспечения автоматического управления полетом вертолета без необходимости привлечения гидравлической системы вертолета;
при этом компоновка управления включает в себя внешний контур управления, который выполнен с возможностью предоставления по меньшей мере одной функции навигации в отношении полета вертолета, и внутренний контур управления, который выполнен с возможностью по меньшей мере обеспечения удержания положения в пространстве для полета вертолета.
27. Автопилот по п. 26, в котором упомянутый элемент привода соединяет выходы управления с системой управления циклическим шагом вертолета параллельно с любыми воздействиями пилота, которые прикладываются к системе управления циклическим шагом.
28. Автопилот по п. 26, в котором внутренний контур включает в себя набор из трех тройных процессоров для обеспечения тройного резервирования при генерировании упомянутых сигналов электрического привода, при этом каждый тройной процессор генерирует сигналы управления креном и сигналы управления тангажом.
29. Автопилот по п. 28, в котором первый один из и второй один из тройных процессоров вырабатывают сигналы управления креном для элемента привода креном и сигналы управления тангажом для элемента привода тангажа, и третий тройной процессор не предоставляет сигналы управления креном и управления тангажом в элемент привода.
30. Автопилот по п. 28, в котором внутренний контур дополнительно выполнен таким образом, что каждый тройной процессор одновременно генерирует по меньшей мере один сигнал управления электродвигателем.
31. Автопилот по п. 30, в котором внутренний контур выполнен с возможностью приема команды управления от внешнего контура для каждой итерации внутреннего контура как часть генерирования сигнала управления электродвигателем каждого тройного процессора.
32. Автопилот по п. 31, в котором внешний контур выполнен с возможностью выполнения взаимно однозначной итерации с внутренним контуром.
33. Автопилот по п. 30, содержащий элемент привода тангажа и элемент привода крена для приложения воздействия по тангажу и воздействия по крену соответственно к соединению управления вертолетом, и каждый из этих элементов привода включает в себя резервный набор электродвигателя, включающий в себя первый электродвигатель и второй электродвигатель, и первый тройной процессор генерирует первые сигналы процессора для управления электродвигателем для управления первым электродвигателем элемента привода тангажом и первым электродвигателем элемента крена, и второй тройной процессор генерирует вторые сигналы процессора для управления электродвигателем, которые управляют вторым электродвигателем элемента привода тангажом и вторым электродвигателем элемента привода крена.
34. Автопилот по п. 33, в котором каждый из элемента привода тангажом и элемента привода креном включает в себя выходной вал и каждый из которых выполнен таким образом, что любой один из первого и второго электродвигателя и/или оба из первого электродвигателя и второго электродвигателя заданного одного из элементов привода могут вращать заданный выходной вал заданного элемента привода для обеспечения воздействий по соединению управления.
35. Автопилот по п. 34, в котором выходной вал каждого из элемента привода тангажа и элемента привода крена может обеспечить по меньшей мере 300 фунтов силы для соединения управления вертолетом.
36. Автопилот по п. 26, в котором упомянутый вертолет включает в себя циклическое управление, при этом упомянутый элемент привода обеспечивает механическое воздействие для активации циклического управления.
37. Автопилот вертолета, который включает в себя гидравлическую вспомогательную систему, которая принимает входные воздействия управления полетом от пилота и, в свою очередь, формирует механические выходные воздействия, которые механически соединены с вертолетом, для обеспечения для пилота управления вертолетом, содержащий:
компоновку датчика, которая формирует набор выходных сигналов датчика, которые характеризуют полет вертолета;
компоновку управления, которая принимает выходные сигналы датчика и генерирует сигналы электрического привода; и
компоновку элементов привода, которая выполнена электромеханической и принимает упомянутые электрические сигналы привода для генерирования выходных сигналов управления в ответ на это, и которая механически соединена с гидравлической вспомогательной системой и которая выполнена с возможностью взаимодействия с компоновкой управления для обеспечения автоматического управления полетом вертолета в первом, нормальном режиме, с гидравлической вспомогательной системой в нормальном рабочем состоянии, и во втором режиме отказа, когда гидравлическая вспомогательная система находится в состоянии отказа, для обеспечения автоматического управления полетом вертолета в каждом из нормального режима и режима с отказом.
38. Автопилот по п. 37, в котором упомянутая компоновка датчика выполнена с возможностью определения рабочего состояния гидравлической вспомогательной системы в качестве одного из нормального режима и режима с отказом, и упомянутая компоновка управления генерирует электрические сигналы привода на основе первого, нормального набора параметров, в соответствии с детектированием нормального режима и второго набора параметров с отказом при детектировании режима отказа гидравлической системы.
39. Автопилот по п. 38, в котором отказ гидравлической вспомогательной системы формирует мертвую зону для механических входных сигналов управления, подаваемых в нее, при этом набор параметров при отказе сконфигурирован для по меньшей мере компенсации мертвой зоны.
40. Автопилот по п. 37, в котором упомянутая компоновка элементов привода соединяет выходные сигналы управления с управлением циклическим шагом вертолетом параллельно с любым воздействием пилота, которое прикладывается к управлению циклическим шагом.
41. Автопилот по п. 37, в котором упомянутый вертолет включает в себя управление циклическим шагом, которым управляют с помощью упомянутой гидравлической вспомогательной системы, при этом упомянутая компоновка элемента привода обеспечивает механические входные сигналы для активации гидравлической вспомогательной системы.
42. Способ управления вертолетом, который содержит гидравлическую вспомогательную систему, выполненную по меньшей мере для активации системы ротора вертолета, при котором:
генерируют сигналы электрического управления автопилотом в соответствии с полетом вертолета; и
конфигурируют электромеханическую компоновку элемента привода для приема электрических сигналов управления и для соединения механических входных сигналов управления с гидравлической вспомогательной системой на основе электрических сигналов управления автопилота для взаимодействия с компоновкой управления для обеспечения автоматического управления полетом вертолета в первом, нормальном режиме, с гидравлической вспомогательной системой в нормальном рабочем состоянии и во втором режиме с отказом, в котором гидравлическая вспомогательная система находится в состоянии работы с отказом для обеспечения автоматического управления полетом вертолета в каждом из нормального режима и режима с отказом.
43. Способ по п. 42, дополнительно содержащий этапы, на которых: определяют статус работы гидравлической вспомогательной системы, как один из нормального режима и режима с отказом, и генерируют электрические сигналы управления на основе первого, нормального набора параметров, при детектировании нормального режима и второго набора параметров с отказом при детектировании режима с отказом гидравлической вспомогательной системы.
44. Способ по п. 43, в котором отказ гидравлической вспомогательной системы формирует мертвую зону для механических входных сигналов управления, прикладываемых в ней, и способ включает в себя этап, на котором конфигурируют набор параметров с отказом для по меньшей мере компенсации мертвой зоны.
45. Способ по п. 42, включающий в себя соединение выходных воздействий управления с управлением циклическим шагом вертолета параллельно с любыми воздействиями пилота, которые прикладываются к управлению циклическим шагом.
46. Способ по п. 42, при котором упомянутый вертолет включает в себя управление циклическим шагом, которым управляют с помощью упомянутой гидравлической вспомогательной системы, при этом упомянутая компоновка элемента привода выполнена с возможностью предоставления механических входных воздействий для активации гидравлической вспомогательной системы.
47. Система управления полетом для избирательного автоматического управления горизонтальным полетом вертолета, причем полет вертолета отличается набором параметров ориентации, включающих в себя ориентацию тангажа, ориентацию крена и ориентацию рыскания, содержащая:
трехосевой датчик скорости MEMS, установленный на упомянутом вертолете для генерирования сигнала скорости крена, сигнала скорости тангажа и сигнала скорости рыскания, которые реагируют на изменения упомянутой ориентации крена, ориентации тангажа и ориентации рыскания соответственно;
трехосевой акселерометр MEMS для генерирования сигналов акселерометра, в соответствии с упомянутым горизонтальным полетом;
приемник GPS, установленный на упомянутом вертолете, для генерирования сигнала курса, сигнала высоты и сигнала скорости в соответствии с горизонтальным полетом вертолета; трехосевой магнитометр для генерирования сигналов магнитометра;
контроллер, установленный на упомянутом вертолете, для приема набора входных сигналов, состоящих из сигнала скорости тангажа, сигнала скорости крена, сигнала скорости рыскания, сигналов акселерометра, сигналов курса, сигналов магнитометра, сигнала скорости и сигнала высоты, для определения истинного пространственного положения вертолета и генерирования набора сигналов управления для поддержания стабильной ориентации при горизонтальном полете вертолета в соответствии с выбранным курсом, определенным по земле и на выбранной высоте; и компоновка привода, которая принимает набор сигналов управления, для регулирования горизонтального полета вертолета на основе набора сигналов управления.
48. Система по п. 47, в которой упомянутый приемник GPS содержит не более чем одну антенну GPS.
49. Система управления полетом для избирательного автоматического управления горизонтальным полетом вертолета, причем горизонтальный полет характеризуется набором параметров ориентации, включающих в себя ориентацию тангажа, ориентацию крена и ориентацию рыскания, содержащая:
трехосевой датчик скорости MEMS, установленный на упомянутом вертолете, для генерирования сигнала скорости крена, сигнала скорости тангажа и сигнала скорости рыскания, которые возникают при изменении упомянутой ориентации крена, ориентации
тангажа и ориентации рыскания соответственно;
трехосевой акселерометр MEMS для генерирования сигналов акселерометра в соответствии с упомянутым горизонтальным полетом;
приемник GPS, установленный на упомянутом вертолете, для генерирования сигнала курса и сигнала скорости в соответствии с горизонтальным полетом вертолета;
трехосевой магнитометр для генерирования сигналов магнитометра;
контроллер, установленный на упомянутом вертолете для приема набора входных сигналов, состоящих из сигнала скорости тангажа, сигнала скорости крена, сигнала скорости рыскания, сигналов ускорения, сигнала курса и сигнала скорости, для определения истинного пространственного положения вертолета и для генерирования набора сигналов управления для поддержания стабильной ориентации при горизонтальном полете вертолета в соответствии с выбранным курсом, определенным по земле и выбранной скоростью для выбранного курса; и
компоновку привода приема набора сигналов управления для регулирования горизонтального полета вертолета на основе набора сигналов управления.
50. Система управления полетом для избирательного автоматического управления полетом вертолета, которая выполнена с возможностью полета при зависании, причем такое зависание характеризуется набором параметров ориентации, включающим в себя ориентацию тангажа, ориентацию крена, ориентацию рыскания и положение над грунтом, содержащая:
компоновку датчиков MEMS, установленную на упомянутом вертолете, для генерирования сигнала скорости тангажа, который соответствует изменениям упомянутой ориентации тангажа, и сигнала скорости крена, который соответствует изменениям упомянутой ориентации крена, сигнала скорости рыскания, который соответствует упомянутой ориентации рыскания, и сигналов ускорения, соответствующих упомянутому зависанию;
трехосевой акселерометр MEMS для генерирования сигналов акселерометра в соответствии с упомянутым горизонтальным полетом;
магнитометр для генерирования сигналов магнитного направления;
приемник GPS, установленный на упомянутом вертолете, для генерирования сигнала положения, сигнала курса и сигнала скорости в соответствии с зависанием вертолета;
компоновку обработки, установленную на упомянутом вертолете, для приема набора входных сигналов, состоящих из сигнала скорости тангажа, сигнала скорости крена, сигнала рыскания, сигналов ускорения, сигнала положения, сигнала курса, сигнала скорости и сигнала магнитного направления, для определения истинного пространственного положения вертолета и для генерирования набора сигналов управления для поддержания стабильного зависания вертолета в соответствии с выбранным положением зависания; и
компоновку элементов привода для приема набора сигналов управления для регулирования зависания вертолета на основе набора сигналов управления.
51. Автопилот для вертолета, содержащий:
внутренний контур, который выполнен по меньшей мере для предоставления истинного пространственного положения для полета вертолета, включающий в себя заданный уровень избыточности, прикладываемой для внутреннего контура; и
внешний контур автопилота, который выполнен с возможностью предоставления по меньшей мере одной навигационной функции в отношении полета вертолета, при этом каждый из внутреннего контура и внешнего контура сконфигурирован с тройными процессорами.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 20070164168 A1, 19.07.2007 | |||
| US 6325331 B1, 04.12.2001 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Самодвижущаяся зимняя повозка | 1924 |
|
SU8813A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

