Область техники
Изобретение относится к средствам обеспечения взлета и посадки экраноплана с использованием винтового движителя горизонтальной тяги и воздушной подушки.
Предшествующий уровень техники
Использование развитого центроплана в качестве несущей поверхности при движении на воздушной подушке предусмотрено патентами RU №2057040 и RU №2173644. Патентом 2057040 предусмотрен также отбор значительной части воздуха из потока за винтовым движителем для создания статической воздушной подушки под центропланом на участке, ограниченном убирающимися завесами. Отбор воздуха для создания статической воздушной подушки от толкающего винтового движителя предусмотрен заявкой RU 94044419. Авторским свидетельством SU 1511170 предусмотрено размещение винтового движителя в кольцевом канале и отбор перед ним воздуха для создания статической воздушной подушки. Ближайшим аналогом комплекса взлетно-посадочных устройств экраноплана является изобретение по патенту RU №2129501, а ближайшим аналогом способа обеспечения взлета и посадки экраноплана - изобретение по заявке RU №94006467 А1.
Раскрытие изобретения
Задачей, на решение которой направлено изобретение, является минимизация специальных средств обеспечения взлета и посадки за счет использования на этих режимах средств обеспечения крейсерского режима полета для возможного снижения веса и улучшения летно-технических характеристик экраноплана.
Согласно изобретению взлетно-посадочный комплекс включает в себя:
Толкающий винтовой движитель горизонтальной тяги, охватывающий хвостовую часть фюзеляжа, и кольцеобразный обтекатель, охватывающий винтовой движитель. Поток воздуха, созданный движителем и сформированный обтекателем обеспечивает маневрирование и разгон экраноплана перед взлетом, маневрирование после посадки и создание статической воздушной подушки.
Двигатель винтового движителя, осуществляющий его привод, установлен в хвостовой части фюзеляжа.
Несущий герметичный центроплан ограничивает сверху область создания статической воздушной подушки.
Полые герметичные продольные балки, установленные на периферийных концах по бокам центроплана и надувные амортизирующие баллоны, смонтированные в нижней части продольных балок. При взлете с воды и посадке на воду продольные балки с надувными баллонами служат поплавками и выполняют роль бокового ограждения при движении экраноплана на статической воздушной подушке. Надувные баллоны также снижают динамические нагрузки при посадке.
Переднее и заднее гибкие убираемые ограждения, которые расположены на нижней поверхности передней и задней частей центроплана и формируют область создания статической воздушной подушки.
Средства создания статической воздушной подушки под центропланом.
Воздуховод наддува воздушной подушки, который выполнен в центроплане и предназначен для отвода части воздушного потока за винтовым движителем в область наддува под центропланом, ограниченную передним и задним гибкими ограждениями.
Поворотную створку, смонтированную на центроплане позади винтового движителя с возможностью установки ее в положение перекрытия воздуховода наддува воздушной подушки или под углом к верхней поверхности центроплана с образованием заборника части воздушного потока за винтовым движителем.
Поворотные створки, смонтированные на нижней поверхности центроплана с возможностью установки их в положение перекрытия воздуховода наддува воздушной подушки или в положение открытия выходного отверстия этого воздуховода.
Устройство синхронизации выпуска и уборки гибких ограждений с поворотом створок перед указанным воздуховодом и в его выходном отверстии, включающее в себя два электро- или гидропривода, воздействующих посредством штоков и качалок на указанные ограждения и створки.
Два маневровых руля для изменения направления движения экраноплана перед взлетом и после посадки, смонтированные позади винтового движителя на стойках, расположенных выше поворотной створки в положении образования заборника части потока воздуха за винтовым движителем.
Целесообразно, чтобы расстояние от нижней поверхности каждого амортизационного баллона при надутом состоянии до центроплана на участке его концевой хорды было равно от 0,1 до 0,2 размаха центроплана. Это способствует стабильности создаваемой статической воздушной подушки.
Во многих случаях целесообразно, чтобы переднее и заднее гибкие ограждения были выполнены в рабочем положении сферическими с центрами сфер, расположенными под центропланом в полости воздушной подушки. Сферическая форма придает гибкому ограждению повышенную эксплуатационную жесткость.
Согласно изобретению для обеспечения взлета и посадки экраноплана:
В амортизационных баллонах под продольными балками по бокам центроплана поддерживают избыточное давление, достаточное для амортизации при посадке.
Переднее и заднее гибкие убираемые ограждения пространства статической воздушной подушки на нижней поверхности передней и задней частей центроплана устанавливают в рабочее положение, формируя тем самым область создания статической воздушной подушки.
Поворотную створку на верхней поверхности центроплана позади винтового движителя переводят из положения перекрытия воздуховода в центроплане в положение под углом к верхней поверхности центроплана, соответствующее отбору от 10 до 15% воздушного потока, создаваемого движителем на режимах взлета и посадки экраноплана, с образованием воздухозаборника, для транспортировки по этому воздуховоду центроплана этой части воздушного потока, создаваемого винтовым движителем.
Транспортируют отобранную часть потока воздуха винтового движителя в пространство создания статической воздушной подушки на его участке под передней частью центроплана позади переднего гибкого ограждения, создавая за счет нагнетания этой части потока винтового движителя по воздуховоду избыточное статическое давление воздуха.
Краткое описание чертежей
В дальнейшем изобретение поясняется конкретными примерами его выполнения со ссылками на прилагаемые чертежи, на которых изображены:
Фиг.1 - экраноплан, вид сбоку.
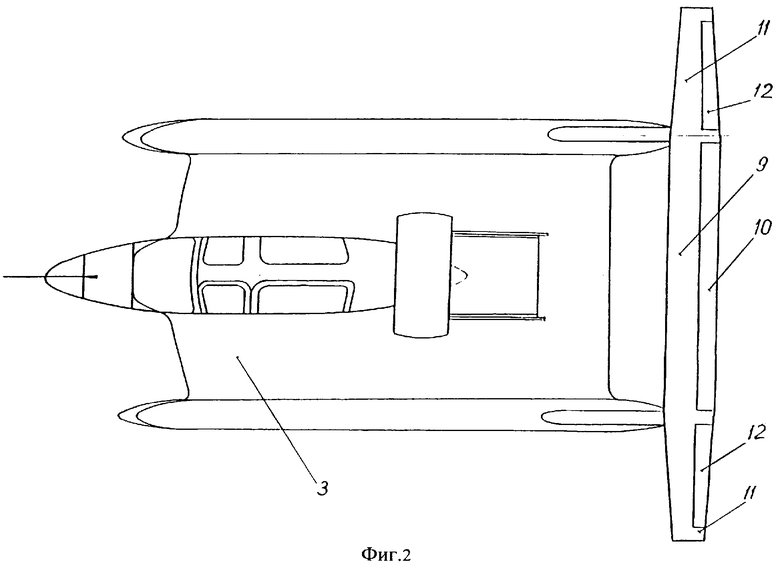
Фиг.2 - экраноплан, вид сверху.
Фиг.3 - экраноплан, вид спереди.
Фиг.4 - модификация экраноплана с консолями крыла, вид сверху.
Фиг.5 - модификация экраноплана с консолями крыла, вид спереди.
Фиг.6 - разрез А-А фиг.1 в положении взлета или посадки.
Фиг.7 - вид В фиг.6.
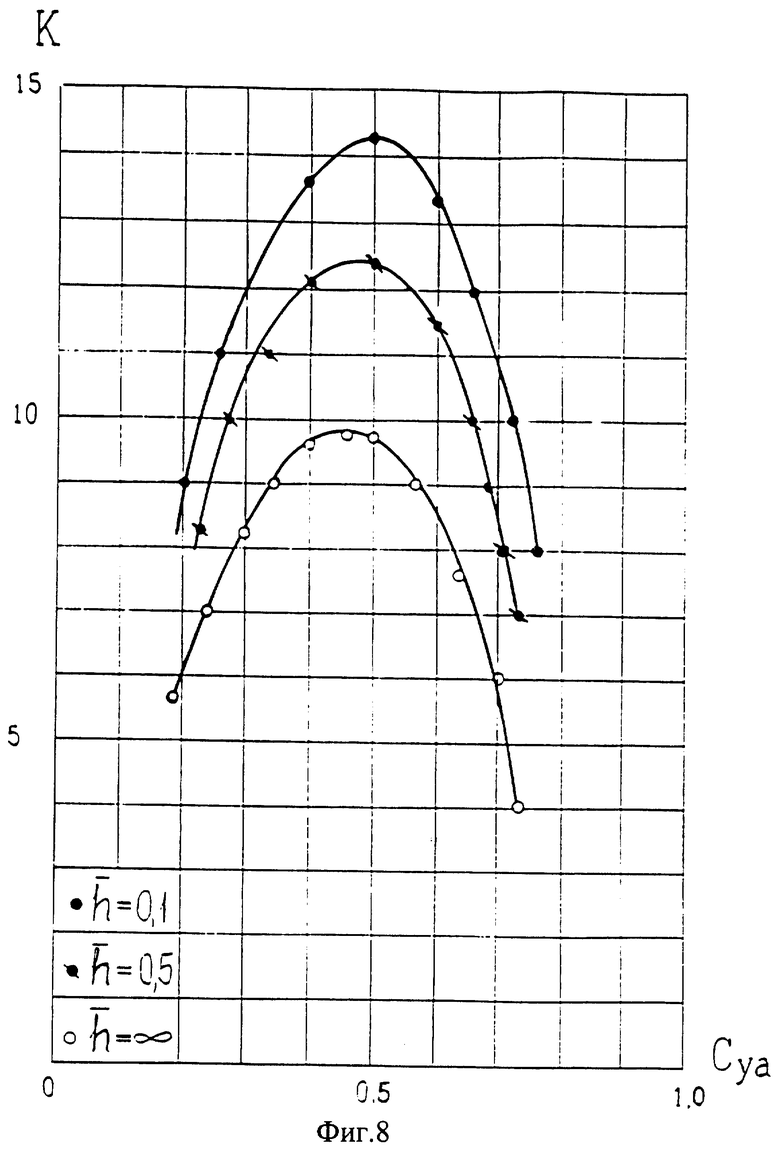
Фиг.8 - графики зависимости аэродинамического качества экраноплана от коэффициента подъемной силы при полете на различных высотах.
Фиг.9 - графики зависимости коэффициента аэродинамической подъемной силы и продольного момента от угла атаки при полете на различных высотах.
Варианты осуществления изобретения
Маршевый двигатель (не показан) расположен в хвостовом обтекателе 13 фюзеляжа 1 экраноплана и осуществляет привод винтового движителя 14 на всех режимах, в том числе при взлете и посадке экраноплана. Толкающий винтовой движитель 14 горизонтальной тяги заключен в кольцеобразный наружный обтекатель 15. Поток воздуха, созданный движителем и сформированный обтекателем, обеспечивает маневрирование и разгон экраноплана перед взлетом, маневрирование после посадки и создание статической воздушной подушки. Несущий центроплан 3 ограничивает сверху область создания статической воздушной подушки. Центроплан 3 является несущим элементом, создающим подъемную силу при крейсерском режиме полета за счет взаимодействия с набегающим потоком воздуха и за счет экранного эффекта близости земной или водной поверхности. На режимах взлета и посадки подъемная сила создается за счет статической воздушной подушки под центропланом. Центроплан 3 выполнен с относительным удлинением от 0,5 до 0,6, углом закрутки осевой хорды относительно задней кромки, равным от 3° до 5°, углом закрутки концевой хорды относительно задней кромки, равным от 1° до 2°, стреловидностью передней кромки 16, соответствующей ее скруглению в горизонтальной плоскости по радиусу, равному от 0,7 до 0,9 размаха центроплана 3, углом поперечного V от минус 4° до минус 6° и относительной толщиной профиля по оси центроплана, равной от 9% до 10%, а у концевых хорд - от 7% до 8%.
Полые герметичные продольные балки 4 установлены вдоль концевых хорд центроплана 3 и снабжены в нижней части надувными амортизирующими баллонами 5. Продольные балки 4 с надувными баллонами 5 в полете работают по принципу концевых шайб, повышая аэродинамическое качество экраноплана за счет увеличения его эффективного удлинения. На режимах взлета и посадки они служат поплавками при взлете с воды и при посадке на воду. При движении экраноплана на статической или динамической воздушной подушке они выполняют роль бокового ограждения. Надувные баллоны 5, кроме того, снижают динамические нагрузки при посадке. Высота продольных балок 4 монотонно уменьшается от средней части к носовой и хвостовой частям. Расстояние от нижней поверхности каждого амортизационного баллона 5 при надутом состоянии до нижней поверхности центроплана 3 на участке его концевой хорды равно от 0,1 до 0,2 размаха центроплана. Это способствует стабильности создаваемой статической воздушной подушки.
Переднее 19 и заднее 20 гибкие убираемые ограждения, расположенные на нижней поверхности передней и задней частей центроплана 3, формируют область создания статической воздушной подушки. Переднее и заднее гибкие ограждения выполнены в рабочем положении сферическими с центрами сфер, расположенными под центропланом в полости воздушной подушки. Сферическая форма придает гибкому ограждению повышенную эксплуатационную жесткость.
Воздуховод 21 наддува воздушной подушки выполнен в центроплане 3 и предназначен для отвода части воздушного потока за винтовым движителем 14 в область наддува, ограниченную передним 19 и задним 20 гибкими ограждениями. Поворотная створка 22 смонтирована позади винтового движителя 14 с возможностью установки ее заподлицо с верхней поверхностью центроплана 3 в положение перекрытия воздуховода 21 или под углом к этой поверхности с образованием воздухозаборника, формируемого поворотной панелью 23. Створка 22 может быть подпружинена на открытие воздуховода 21 либо соединена с панелью 23 кулисным механизмом. Поворотные створки 24, которые могут быть установлены в положение перекрытия воздуховода 21 или в положение открытия выходного отверстия этого воздуховода. Устройство синхронизации выпуска и уборки ограждений 19, 20 с поворотом створок 21 и 24 включает в себя электро- или гидроприводы 25, 26, взаимодействующие посредством штоков 27, 28, тяги 29 и качалок 30, 31, 32, 33 с указанными ограждениями, створками 24 и створкой 21 посредством панели 23.
Рули 34 комплекса взлетно-посадочных устройств предназначены для изменения направления движения экраноплана перед взлетом и после посадки и смонтированы позади винтового движителя 14 на стойках 35, расположенных выше поворотной створки 21 и панели 23 в положении образования ими заборника части воздушного потока за движителем.
При эксплуатации экраноплана надувают амортизационные баллоны 5 и поддерживают в них избыточное давление воздуха до 0,2 атмосфер. Для взлета экраноплана с воды или посадки его на воду при работающих маршевом двигателе и движителе 14 выводят в рабочее положение переднее 19 и заднее 20 гибкие ограждения, а поворотную створку 22 переводят при помощи панели 23 из положения заподлицо с поверхностью центроплана в положение под углом к ней с образованием воздухозаборника. При этом транспортируют отобранную часть потока воздуха за винтовым движителем 14 под переднюю часть центроплана позади переднего гибкого ограждения 19 и создают избыточное давление воздуха до 100 кгс/м2 в полости, образованной совместно нижней поверхностью центроплана 3, продольными балками 4 с амортизационными баллонами 5 и гибкими ограждениями 19 и 20.
При крейсерском режиме полета за счет взаимодействия центроплана с набегающим потоком воздуха и за счет экранного эффекта близости земной или водной поверхности создается подъемная сила динамической воздушной подушки. Чтобы подъемная сила была достаточной, полет осуществляют на высоте от земной или водной поверхности, составляющей от 0,10 до 0,15 средней хорды центроплана либо от 0,2 до 0,3 его размаха, с углом атаки центроплана от 5° до 6°, при горизонтальной тяге винтового толкающего движителя, равной от 0,25 до 0,33 полетного веса экраноплана, со скоростью от 200 до 280 километров в час.
Как следует из графиков, представленных на фиг.8 и 9, во время полета на высоте, соответствующей отношению  расстояния от нижней поверхности центроплана до земной или водной поверхности в интервале величин от 0,10 до 0,15, максимальное аэродинамическое качество К может быть достигнуто при значении коэффициента Суа аэродинамической подъемной силы, соответствующем углу α атаки центроплана от 5° до 6°. Из графиков видно, что, при прочих равных условиях, в процессе полета вблизи экрана (=0,1...0,15) аэродинамическое качество повышается, относительно полета на большой высоте, на 2,5...4,5 единицы. В результате на режиме экранного полета реализуется величина аэродинамического качества порядка 14, что является весьма высоким значением для летательных аппаратов с размерностью 2,0...2,5 тонны взлетного веса. Из графиков фиг.8 видно, что по мере приближения к экрану величина коэффициента аэродинамической подъемной силы, при которой достигается наибольшее аэродинамическое качество, увеличивается от 0,45 при полете на большой высоте до 0,50 при
расстояния от нижней поверхности центроплана до земной или водной поверхности в интервале величин от 0,10 до 0,15, максимальное аэродинамическое качество К может быть достигнуто при значении коэффициента Суа аэродинамической подъемной силы, соответствующем углу α атаки центроплана от 5° до 6°. Из графиков видно, что, при прочих равных условиях, в процессе полета вблизи экрана (=0,1...0,15) аэродинамическое качество повышается, относительно полета на большой высоте, на 2,5...4,5 единицы. В результате на режиме экранного полета реализуется величина аэродинамического качества порядка 14, что является весьма высоким значением для летательных аппаратов с размерностью 2,0...2,5 тонны взлетного веса. Из графиков фиг.8 видно, что по мере приближения к экрану величина коэффициента аэродинамической подъемной силы, при которой достигается наибольшее аэродинамическое качество, увеличивается от 0,45 при полете на большой высоте до 0,50 при  =0,1. Зависимости коэффициента аэродинамической подъемной силы от угла атаки для полета на большой высоте и вблизи экрана, приведенные на фиг.8, показывают значительное увеличение несущей способности экраноплана при полете вблизи экрана. Характер же зависимости коэффициента продольного момента mza по углу атаки для различных высот полета показывает, что экраноплан в диапазоне углов атаки от 0° до 18° статически устойчив, а при 20° и более практически нейтрален. Для диапазона углов атаки от 0° до 12° запас продольной статической устойчивости составляет от минус 0,06 до минус 0,09 вне зависимости от высоты полета.
=0,1. Зависимости коэффициента аэродинамической подъемной силы от угла атаки для полета на большой высоте и вблизи экрана, приведенные на фиг.8, показывают значительное увеличение несущей способности экраноплана при полете вблизи экрана. Характер же зависимости коэффициента продольного момента mza по углу атаки для различных высот полета показывает, что экраноплан в диапазоне углов атаки от 0° до 18° статически устойчив, а при 20° и более практически нейтрален. Для диапазона углов атаки от 0° до 12° запас продольной статической устойчивости составляет от минус 0,06 до минус 0,09 вне зависимости от высоты полета.
Кили 6 с рулями 7 направления установлены на законцовках 8 хвостовой части продольных балок 4. Кили 6 осуществляют поперечную стабилизацию экраноплана. Горизонтальное оперение 9 установлено на килях 6 и снабжено на участке между килями рулем 10 высоты, а на периферийных консолях 11 - элеронами 12. Горизонтальное оперение осуществляет стабилизацию экраноплана по тангажу. Размах горизонтального оперения 9 больше размаха центроплана 3. Расстояние горизонтального оперения 9 от винтового движителя 14 более четырех его диаметров. Размах вертикального оперения - килей 6 - более диаметра винтового движителя 14.
Экраноплан может быть выполнен с консолями 36 крыла, снабженными элеронами 38. При этом площадь консолей составляет от 0,4 до 0,6 площади центроплана 3, размах консолей равен от 2,5 до 3,0 размаха центроплана 3, консоли установлены под углом поперечного V от 1° до 2°, корневой участок 37 каждой консоли, соединенный с продольной балкой 4, установлен под углом от 25° до 30° и составляет по размаху от 0,33 до 0,37 размаха консоли. Экраноплан с консолями крыла способен осуществлять свободный полет преимущественно для перемещения от одного участка экранного полета к другому либо для перемещения к участку, пригодному для посадки и взлета с использованием статической воздушной подушки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКРАНОПЛАН | 2002 |
|
RU2254250C2 |
| ЭКРАНОПЛАН И ЕГО ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС | 2005 |
|
RU2337022C2 |
| ЭКРАНОПЛАН | 2003 |
|
RU2286268C2 |
| СПОСОБ КОМПЛЕКСНОГО ПОВЫШЕНИЯ АЭРОДИНАМИЧЕСКИХ И ТРАНСПОРТНЫХ ХАРАКТЕРИСТИК, ЭКРАНОПЛАН ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА (ВАРИАНТЫ) И СПОСОБ ВЫПОЛНЕНИЯ ПОЛЕТА | 2010 |
|
RU2539443C2 |
| ЭКРАНОЛЕТ ВНЕАЭРОДРОМНОГО БАЗИРОВАНИЯ | 2014 |
|
RU2546359C1 |
| ЭКРАНОЛЕТ | 2006 |
|
RU2317221C1 |
| ЭКРАНОЛЕТ, ЕГО ВЗЛЕТНО-ПОСАДОЧНОЕ УСТРОЙСТВО И ПРИВОД СКЛАДЫВАНИЯ КРЫЛА | 1995 |
|
RU2099217C1 |
| ЭКРАНОПЛАН | 2012 |
|
RU2550568C2 |
| ЭКРАНОПЛАН | 2010 |
|
RU2432274C1 |
| ЭКРАНОПЛАН | 2010 |
|
RU2432275C1 |






Изобретение относится к экранопланостроению и касается создания взлетно-посадочного устройства экраноплана с использованием статической воздушной подушки. Взлетно-посадочный комплекс устройств экраноплана имеет толкающий винтовой движитель горизонтальной тяги, охватывающий хвостовую часть фюзеляжа. Винтовой движитель экраноплана охвачен кольцевым обтекателем и имеет двигатель, установленный внутри хвостовой части фюзеляжа. Экраноплан выполнен с герметичным центропланом и герметичными продольными балками, установленными на периферийных концах центроплана. Надувные амортизирующие баллоны смонтированы в нижней части продольных балок. Во взлетно-посадочный комплекс включены средства создания статической воздушной подушки под центропланом. Способ обеспечения взлета и посадки экраноплана заключается в том, что в амортизационных баллонах под продольными балками по бокам центроплана поддерживают избыточное давление, переднее и заднее гибкие убираемые ограждения пространства статической воздушной подушки на нижней поверхности передней и задней частей центроплана устанавливают в рабочее положение, поворотную створку переводят из положения перекрытия воздуховода в центроплане в положение под углом к верхней поверхности центроплана, соответствующим отбору от 10 до 15% воздушного потока, создаваемого воздушным движителем на режимах взлета и посадки экраноплана, с образованием воздухозаборника для транспортировки по этому воздуховоду центроплана этой части воздушного потока, создаваемого винтовым движителем, и транспортируют отобранную часть потока воздуха винтового движителя в пространство создания статической воздушной подушки на его участке под передней частью центроплана позади переднего гибкого ограждения и создают за счет нагнетания этой части потока винтового движителя по воздуховоду избыточное статическое давление воздуха. Технический результат реализации изобретения с единым техническим замыслом заключается в улучшении летно-технических характеристик экраноплана. 2 н. и 6 з.п. ф-лы, 9 ил.
| US 5566775 А, 21.10.1996 | |||
| RU 94006467 A1, 20.10.1995 | |||
| ГИДРОСАМОЛЕТ | 1992 |
|
RU2064883C1 |
| US 5065833 А, 19.11.1991 | |||
| SU 1651483 А, 27.10.1999. | |||

