Область техники
Группа изобретений относится к авиации и транспортным средствам с воздушной (статической и динамической) разгрузкой, в частности к судам и амфибийным транспортным платформам, самолетам, самолетам- амфибиям и экранопланам. Преимущественной областью использования группы изобретений являются самостабилизированные экранопланы типов А, В и С, поэтому дальнейшие пояснения основываются на примере экранопланов (ЭП).
Предшествующий уровень
Изучение эффекта влияния земли (экрана) и строительство экранопланов продолжается уже более 70 лет. Однако до настоящего времени не созданы экранопланы для массового применения, способные обеспечить уровень безопасности и (или) транспортную эффективность и (или) удобство эксплуатации такие же, как у обычных самолетов или судов, так как не предложено приемлемого комплексного технического решения основных проблем экранопланов - продольной устойчивости, мореходности и амфибийности, реализованного в виде удобной в эксплуатации и обслуживании конструкции.
Особенностью применения экранопланов является то, что высота основного эксплуатационного режима - полета в режиме экранного эффекта меньше длины средней аэродинамической хорды крыла (САХ) - на практике (0,1-0,3), а скорости полета экранопланов находятся в диапазоне 150-600 км/ч, т.е. соответствуют скоростям полета самолетов. При этом аэродинамические силы и их моменты в продольном канале имеют более сложный характер зависимостей от параметров полета и что особенно важно - более высокие градиенты изменения их характеристик.
Применяемые в настоящее время способы обеспечения продольной устойчивости при выполнении полета в условиях дефицита времени на принятие решений в непосредственной близости от водной (земной) поверхности могут приводить (и приводят) к катастрофическим последствиям. Это связано с тем, что при воздействии внешних возмущений или ошибках в технике пилотирования развитие аварийной ситуации может происходить за время, исчисляемое единицами секунд. Большинство известных аварий и катастроф экранопланов, как экспериментальных, так и находившихся в служебной эксплуатации, от легких до сверхтяжелых, так или иначе связаны с продольной устойчивостью и управляемостью. В их числе и экранопланы наиболее известных конструкторов - А.Липпиша и Р.Алексеева.
Из уровня техники, например, Белавин Н.И. «Экранопланы». Л.: Судостроение, 1968 [1], известно, что проблема обеспечения устойчивости ЭП в режиме экранного эффекта решается либо выбором компоновки, либо с помощью систем автоматического управления.
Однако «Временное руководство по безопасности экранопланов», одобренное Комитетом по безопасности Международной Морской Организации (IMO) в декабре 2002 г. в Главе 15 «Аэродинамические системы стабилизации», в п.15.2.2. требует: «В случае отказа любого автоматического оборудования или устройства системы стабилизации или его силового привода параметры движения экраноплана должны оставаться в пределах безопасности», стр. 391. А.И.Маскалик и др. «Экранопланы - транспортные суда XXI века», СПб.: Судостроение, 2005, в дальнейшем обозначается как [2]. Это означает, что экраноплан изначально должен сам «уметь» безопасно летать, т.е. быть статически и динамически устойчивым, а системы автоматического управления (САУ) должны применяться как инструмент для точного выдерживания параметров полета и облегчения работы экипажа.
Собственно, эти требования аналогичны требованиям к системам стабилизации самолетов. Но продольная статическая устойчивость самолета при любой аэродинамической компоновке обеспечивается выбором центровки, потому что возникновение и изменение аэродинамических сил самолета происходит в двухкомпонентной динамической системе «воздушный поток - крыло». При этом в диапазоне летных углов атаки величина подъемной силы имеет линейную зависимость от угла атаки. Принципиальным здесь является то, что существующие компоновки самолетов являются необходимыми и достаточными для обеспечения заданного уровня безопасности, а динамическая система «воздушный поток - крыло» изолирована от земной поверхности. При полетах на безопасных высотах, реальные отклонения от заданных высот из-за различных внешних возмущений, исключая катастрофические ситуации, составляют от нескольких метров до нескольких десятков метров (в зоне сильной турбулентности), что на два - три порядка меньше текущей высоты полета, поэтому не наступает угрозы безопасности полета из-за изменения высоты полета.
В противоположность этому подъемная сила крыла в зоне экранного эффекта помимо получения нелинейности в зависимости от угла атаки существенно зависит и от высоты до опорной поверхности. При этом диапазон изменения высоты может составлять величину меньше средней аэродинамической хорды крыла (САХ), а подъемная сила при этом может измениться почти в два раза. Например, для тяжелых экранопланов «Орленок» (140 т) и «Лунь» (400 т) уменьшение относительной высоты полета над водной поверхностью с 0,9 до 0,1 САХ приводит к увеличению по экспоненте коэффициента подъемной силы крыла Су на 90% - Рис.57, стр.41 [2]. Если при этом будет увеличиваться угол атаки, то прирост Су будет еще большим и быстрым. Таким образом, динамическая система «воздушный поток - крыло» в режиме экранного эффекта получает третью составляющую и становится системой «воздушный поток - крыло - опорная поверхность». Связь исходной системы с новой составляющей можно охарактеризовать как «сверхкритическая», так как, кроме увеличения градиента изменений подъемной силы крыла, происходит значительное смещение центра давления. При этом смещение центра давления к задней кромке крыла, создает некомпенсированный пикирующий момент.
Таким образом, экраноплан представляет собой существенно нелинейную систему.
Другим фактором, ухудшающим безопасность полета, прямо связанным с продольным каналом и ухудшающим мореходность и топливную экономичность, является способ выполнения полета. В основном для экранопланов применяют тот же способ, что и для самолетов, а именно для взлета необходимо разогнать экраноплан до скорости отрыва и при этом изменять угол тангажа для создания необходимой величины подъемной силы. В дальнейшем на всех этапах полета вплоть до посадки требуется соответствующее изменение угла тангажа.
Проблема заключается в высокой степени опасности маневров с изменением углов тангажа на высотах, соизмеримых с длиной летательного аппарата. Это подтверждается и происшествиями с экранопланами, и многочисленными катастрофами и авариями самолетов в процессе выполнения взлетов и посадок.
Следующая важная характеристика экранопланов - мореходность. С одной стороны, она ограничена возникновением больших ударных нагрузок при взлете и посадке в условиях волнения, которые могут привести к повреждению или разрушению конструкции, а также к возникновению сил и моментов, которые препятствуют достижению скорости отрыва и нарушают гидроаэродинамические условия, необходимые для выполнения взлета или обеспечения безопасной посадки. С другой стороны, мореходность ограничена реальной относительной высотой экранного полета, которая зависит от геометрических параметров экраноплана - его габаритной длины и ширины несущей плоскости (длины САХ). То есть решение проблемы мореходности, как и продольной устойчивости, находится в сфере выбора способов формирования гидроаэродинамических сил и выбора компоновочной схемы.
Непосредственную зависимость от компоновки экранопланов имеет и амфибийность. От нее зависят эксплуатационные возможности экранопланов как альтернативных транспортных систем. Полная амфибийность позволяет осуществлять транспортное обслуживание в местах, недоступных для обычных судов и самолетов, то есть является более экономичной альтернативой вертолетам, но с большей дальностью полета. Кроме этого обеспечивается удобство практического применения и технического обслуживания.
Таким образом, принципиальное решение проблем безопасности и эффективности экранопланов может быть достигнуто только в случае определенным образом выбранной компоновки, которая позволяет создавать заданную систему аэродинамических сил и обеспечивать выполнение полета по безопасным алгоритмам.
Из уровня техники известно большое количество компоновочных схем, однако среди тех, которые были реализованы и испытаны, можно выделить следующие характерные типы:
- экранопланы по самолетной схеме Р.Алексеева, типа экраноплана КМ, с системой поддува струй двигателей под крыло - Рис.65 [2], патент RU 2076816 (построены в странах: Россия, Швеция, Китай);
- экранопланы по самолетной схеме А.Липпиша (A.M.Lippisch) с куполообразным крылом «Обратная дельта» - патент US 3190582, Ю.Макаров - патент RU 2185979 (построены в странах: ФРГ, США, Австралия, Тайвань, Китай, Россия);
- катера-экранопланы по крыльевой схеме типа «Тандем» и глиссирующими корпусами катерного типа: А.Вейланд (C.W.Weiland) - патент US 3244246, Г.Йорг (G.Joerg) - патент US 3908783, А.Блум (A.Blum) - патент US 5335742 (построены в странах: США, ФРГ);
- экранопланы по схеме «Составное врыло»: Р.Бартини - Экранолет 14МП1П, (К.Г.Удалов и др.. «Самолет ВВА-14», М., 1994, в дальнейшем - [8]), с наддувом - ЭЛА-01 (Журнал «Техника Молодежи» №8, 2005, Россия, стр.29-32, в дальнейшем - [9]) и поддувом «Иволга-2» - В.Калганов;
- патент RU 2099217;
- экранопланы серии АДП по схеме «Утка» с несущим стабилизатором А.Панченкова, Рис.7 («Экранопланы Украины», Журнал «Авиация общего назначения» №5, 2000, в дальнейшем - [11]), В.Суржиков и др. - патент RU 2224671;
- экранопланы по схеме «Летающее крыло»: Рис.171, 172, 178 [2], ОИИМФ-2, Рис.1 [11].
Из уровня техники также известно условие обеспечения собственной статической и динамической устойчивости экраноплана, при котором фокус по углу атаки должен быть расположен сзади фокуса по высоте, а центр масс должен находиться между ними, причем предпочтительнее его расположение между фокусом по высоте и серединой расстояния между фокусами: Fig.10, N.Kornev, «COMPLEX NUMERICAL MODELING OF DYNAMICS AND CRASHES OF WING-IN-GROUND VEHICLES», 41st Aerospace Sciences Meeting and Exhibit, 6-9 January 2003, Reno, Nevada, в дальнейшем - [13] и стр.121-122 [2].
Известны способы практического обеспечения этих условий: В. Архангельский - патент RU 2018465, Л.Новолоцкий - патент RU 209722, а также условий самостабилизации экранопланов типов «Утка» и «Тандем» - патент RU 2224671 и патент US 3908783.
Известен способ расширения диапазона эксплуатационных центровок самолета расположением двух крыльев по схеме «Тандем» - А.Белосвет и др. - патент RU 2102287. Кроме этого, известно, что при одинаковых геометрических высотах полета и при равной площади, крылья меньшего удлинения обладают более высокими демпфирующими характеристиками по высоте, пропорциональными частной производной подъемной силы по высоте.
Известны способы создания статической воздушной подушки (СтВП):
- поддув от маршевых или стартовых движителей в открытую спереди камеру, сформированную под крылом или центропланом - СтВП низкого давления, Рис.65 [2], патент RU 2099217;
- наддув в закрытую по периметру камеру, расположенную под центропланом или под специальной конструкцией от дополнительных двигателей и вентиляторов, ЭЛА-01 [2], В.Игнатьев - патент RU 2174080, В.Морозов - патент RU 2053903;
- наддув в закрытую по периметру камеру от отдельного вентилятора с перераспределением мощности двигателей между вентилятором и маршевым движителем, В.Назаров - патент RU 21272202;
- наддув в закрытую по периметру камеру полной струей маршевого движителя путем поворота плоскости вращения винта, О.Микоян и др. - авторское свидетельство SU 1511170, А.Макиенко и др. патент RU 2139212;
- наддув в закрытую по периметру камеру путем подачи части струи от маршевых движителей, экраноплан ОИИМФ-3 [11], Ю.Макаров - патент RU 2185979, 27.07.2002, Р.Мартиросов - патент RU 2254250, 20.06.2005, П. и Дж-Райс (Р. u. J. Rice), патент US 6158540.
Известен способ повышения тяги воздушного винта до 30% путем применения «кольцевого центроплана» И.В.Остославский В.Р.Матвеев Труды ЦАГИ им. проф. Н.Е.Жуковского. Выпуск 248, М., 1935 г., в дальнейшем - [27].
Известны способы повышения мореходности:
- увеличением размеров экраноплана;
- применением обводов с большим углом килеватости и реданами;
- применением амортизируемых, отклоняемых гидролыж;
- применением статической воздушной подушки высокого давления;
- применением вертикального взлета.
Для оценки известных компоновочных схем по критерию «естественная устойчивость» (или «самостабилизация») можно ввести следующее наглядное сравнение. В связи с тем, что определяющую роль в формировании несущих свойств крыла вблизи экрана играет нижняя поверхность и форма ее профиля (Рис.95 и п.11 на стр. 86 [2]) имеется, как сказано выше, «сверхкритическая» связь крыла с опорной поверхностью посредством динамической воздушной подушки. По схеме действия сил и моментов систему «воздушный поток - крыло - опорная поверхность» можно сравнить с колесной опорой наземного транспорта. Тогда компоновочные схемы - самолетная, «Летающее крыло», «Составное крыло» будут соответствовать одноосной тележке, которую толкают (или тянут) и одновременно удерживают равновесие с положением ее центра масс в небольшом диапазоне около вертикали, исходящей из точки опоры. Силы гравитации, тяги или поддержания равновесия создают моменты вокруг точки опоры. Изменение величин этих сил сопровождается прогрессирующим нарушением предшествующего равновесия. Поэтому в продольном направлении одноосная тележка и компоновочные схемы, соответствующие ей, являются принципиально неустойчивыми.
Компоновочные схемы «Тандем» и «Утка» - соответствуют двухосной тележке с положением центра масс между точками опоры. Двухосная тележка обладает принципиальной, то есть естественной устойчивостью, а ее продольное равновесие в практических случаях не зависит от точки приложения силы тяги и изменения ее величины. Ввиду разной природы возникновения сил поддержания наземного объекта и летательного аппарата существуют определенные условия, при которых схемы «Тандем» и «Утка» обладают собственной продольной устойчивостью, близкой к устойчивости двухосной тележки.
Таким образом, по аналогии с наземным транспортом, все компоновочные схемы можно условно разделить на «одноосные» и «двухосные» («многоосные»), а при создании летательных аппаратов для режима экранного эффекта принцип «многоопорности» («многоосности») должен быть преимущественным.
Исходя из вышесказанного, можно провести сравнительную оценку известных компоновочных схем с точки зрения решения основных проблем экранопланов.
«Двухосные» компоновочные схемы «Тандем» и «Утка» обладают естественными предпосылками для обеспечения самостабилизации. Но этот тип экранопланов имеет существенные недостатки: необходимость разгона на взлете, тонкая настройка на определенную скорость и высоту или узкий диапазон их изменений, очень малая реальная (относительно габаритной длины аппаратов) высота экранного полета, что резко снижает их мореходность. Кроме этого, амфибийность или отсутствует, или ограничена - требуются слипы с твердым покрытием и малыми углами подъема. Возможности выполнения полета вне зоны экранного эффекта и весовой разгрузки с помощью статической ВП не предусматриваются. Эти схемы имеют минимальную вариативность.
На «одноосных» компоновочных схемах обеспечить самостабилизацию (самобалансировку по продольному каналу) намного сложнее - это является их основной проблемой. Самолетная схема с низкорасположенным крылом и поддувом, по которой построены экранопланы КМ, «Орленок», «Лунь» (Рис.65, Рис.54, Рис.55 [2]), не обладает самовосстановлением исходного баланса моментов относительно центра масс после действия случайных возмущающих факторов, то есть имеет место прогрессирующая неустойчивость в продольном канале управления. Другими словами, устойчивый околоэкранный полет может быть реализован только путем ручного парирования внешних возмущений экипажем путем коррекции балансировки экраноплана отклонением рулей высоты вручную или с помощью системы автоматического управления (САУ).
Следующая проблема - безопасность вывода экраноплана из экранного полета в свободный полет и обратного перехода от свободного полета к экранному полету, связанная с необходимостью создания рулем высоты кабрирующего момента для перевода экраноплана в набор высоты. По мере удаления от экрана центр давления смещается вперед, что приводит к энергичному убыванию пикирующего момента от подъемной силы при одновременном неконтролируемом росте избытка кабрирующего момента, который может привести к выходу на закритические углы атаки, потере скорости, срыву потока и сваливанию. Применение развитого стабилизатора, сравнимого по площади с основным крылом, не спасло тяжелые экранопланы от катастроф. Поэтому применение самолетной компоновки для тяжелых и сверхтяжелых экранопланов является концептуальной ошибкой, что было признано и самим Р.Алексеевым.
Помимо проблем с устойчивостью преимущество экранопланов такой компоновки по топливной экономичности в сравнении с обычными самолетами резко падает из-за большого расхода топлива во время взлета. Мореходность недостаточна. Многолетние исследования и разработки в США привели к тому, что компанией Боинг разработан проект сверхтяжелого транспортного самолета «Пеликан» по традиционной самолетной схеме с наземными стартом и посадкой. Самолет рассчитан на длительные полеты, как в режиме экранного эффекта, так и на высотах до 6000 метров, патент US 6848650.
Самолетная компоновочная схема экраноплана имеет небольшую вариативность и пригодна для ограниченного применения, например для экранопланов типа «А»: «Волга-2» - патент SU 1786768, «Акваглайд», Рис.70 [2]. Их продольная устойчивость обеспечена применением крыла с «S»-образным аэродинамическим профилем (которое имеет худшие несущие свойства) и точным позиционированием центра масс, тонкой настройкой на малую высоту экранного полета, размещением тянущих винтов впереди крыла с поддувом под крыло, уменьшением грузоподъемности, ограничением мощности двигателей и ухудшением мореходности.
Самолетная схема А.Липпиша тоже требует разгона на взлете, тонко настроена на режим экранного полета, недостаточно устойчива на переходных режимах и опасна в свободном полете, непригодна для больших скоростей, неудобна в практическом использовании и обслуживании, реализуется при малых значениях удельной нагрузки на крыло. Неоптимальна для тяжелых аппаратов. Имеет ограниченную амфибийность и минимальную вариативность.
Выполнение условий статической и динамической устойчивости на самолетных схемах с одним крылом усложняется тем, что расстояние между фокусами мало по сравнению с длиной хорды, поэтому положение центра масс должно быть точно позиционировано в узком диапазоне. С другой стороны, само понятие фокуса по высоте существует только для полета в условиях влияния земной поверхности. Это в совокупности с необходимостью изменения тангажа усложняет пилотирование на переходных режимах и при различных возмущениях. Известны рекомендации по пилотированию экранопланов, построенных по схеме А.Липпиша, которые выведены на основании численного моделирования движения и аварий экранопланов [13], которые показывают, что выполнение условий статической и динамической устойчивости для установившегося полета сами по себе недостаточны для обеспечения безопасности на переходных режимах.
Схема «Летающее крыло» в том виде, в каком были попытки ее реализации (в том числе проект «Колумбия» в США), неустойчива. Требуется либо применять системы автоматического управления и демпфирования, либо ограничивать летные возможности, либо применять значительные стабилизирующие или дополнительные несущие плоскости, но тогда она становится схемой, близкой к «Составному крылу».
«Составное крыло» (Р.Бартини - ВВА-14, МАИ - ЭЛА-01, В.Калганов - «Иволга-2») обладает наилучшими показателями по большинству параметров, что подтверждено их летными испытаниями и доведенным до коммерческого использования экранолетом ЭК-12 по патенту России №2099217. Эти экранолеты показывают наибольшие фактические (относительно длины аппарата) высоты экранного полета. Например, при выполнении испытательных полетов ВВА-14 установлено, что при средней аэродинамической хорде в 10,75 м эффект динамической подушки начинал проявляться уже на высоте 10-12 м. Данная компоновка оптимальна для различных сфер коммерческого и специального применения, т.е. обладает максимальной вариативностью. Так как центроплан имеет прямоугольную форму, то легко организовать статическую ВП. Компоновка пригодна для любых скоростей полета.
Однако, несмотря на то, что консоли большого удлинения улучшают продольную стабилизацию, эти экранолеты не обладают самостабилизацией, присущей «двухосным» схемам, поэтому они не защищены в полной мере, в случае сильного ветрового возмущения или ошибки в технике пилотирования, от резкого кабрирования с уходом из зоны экранного эффекта, потерей скорости и управляемости.
Кроме этого, конструкция по патенту RU 2099217 имеет низкую комфортабельность для пассажиров и неудобна для технического обслуживания. Поддув под крыло в открытое спереди пространство приводит к интенсивному выбросу воздуха обратно, против направления движения. При рулении на воде и на грунте, выходе на необорудованный берег и при сходе с него в воду происходит сильное пыле- и брызгообразование в передней полусфере. Помимо ухудшения видимости происходит механическое повреждение поверхностей конструкции песком и мелкими камнями и требует дополнительной защиты воздушных фильтров двигателей. В зимних условиях в воздух может быть поднят сухой свежевыпавший снег с ухудшением видимости до значений нескольких метров, что приведет к невозможности безопасного движения над земной поверхностью. При поддуве под крыло нерационально используется импульс струи от винтокольцевых движителей и создается вредное повышение давления на верхней лобовой части крыла из-за обдува поверхности под большими углами. Это вынуждает применять сложную механизацию носовой части крыла, что усложняет и утяжеляет конструкцию. Интенсивный выброс воздуха из-под крыла обратно не позволяет создать ВП высокого давления. Несмотря на поддув, данная схема требует разгона на взлете и пробега на посадке.
Этого недостатка лишен экраноплан ЭЛА-01, статическая ВП которого позволяет взлетать на месте с последующим разгоном на ней до крейсерской скорости. Вертикально взлетающая амфибия ВВА-14 изначально проектировалась с применением поддува под центроплан от 12-ти наклонно установленных в нем турбореактивных двигателей. Испытания режима вертикального взлета на специальном газодинамическом стенде с шестью реактивными двигателями подтвердили его практическую выполнимость.
Ближайшим аналогом по совокупности признаков является техническое решение по патенту RU 2254250 С2, B60V 1/08.
Раскрытие изобретения
Целью предлагаемой группы изобретений является создание самостабилизированных летательных аппаратов и других транспортных средств во всех весовых категориях, имеющих повышенную безопасность полета и выполнения маневров, увеличенную несущую способность и высоту полета в режиме экранного эффекта, уменьшенные размеры, улучшенные взлетно-посадочные характеристики, амфибийность и экономичность, расширенные функциональность и диапазон эксплуатационных центровок, повышенные удобство эксплуатации и технического обслуживания.
Заявленные цели достигаются одновременным применением к компоновочным схемам «Летающее крыло» и «Составное крыло», предлагаемым настоящей группой изобретений, способов формирования системы аэродинамических сил, конструктивных решений и концептуально связанных с ними способов безопасного пилотирования.
Проблема продольной устойчивости решается приданием центроплану (несущей плоскости малого удлинения) свойства естественной стабилизации, присущего «двухосным» схемам, то есть созданием в продольном направлении минимум двух взаимно уравновешивающих друг друга относительно центра масс подъемных сил, а также изменением условий взаимодействия центроплана со свободно набегающим потоком воздуха и опорной поверхностью. Для этого в границах сплошного, в проекции на горизонтальную плоскость, центроплана с концевыми аэродинамическими шайбами-поплавками (АШП) создают локальные зоны образования подъемных сил. Локальные зоны формируют с помощью соответствующего количества несущих плоскостей малого удлинения (ПМУ), из которых и составляют центроплан заданных размеров. ПМУ располагают вдоль продольной оси с перекрытием в горизонтальной плоскости и симметрично относительно диаметральной плоскости. Переднюю (передние) ПМУ снабжают носовым щитком и флаперонами. Заднюю (задние) ПМУ снабжают флаперонами. На передних кромках второй и последующих ПМУ (второй и последующей групп ПМУ) монтируют винтокольцевые движители (ВКД). Причем передние кромки этих ПМУ расположены в плоскостях выходных срезов ВКД или внутри колец ВКД. Кроме этого, передние кромки задних ПМУ располагают над передними кромками флаперонов впереди стоящих ПМУ. Таким образом, между нижними поверхностями задних ПМУ и верхними поверхностями флаперонов формируют воздушные каналы, через которые под центроплан подают нижнюю часть (нижние части) реактивной струи (струй) ВКД. ВКД монтируют с установочными углами, равными или близкими установочным углам плоскостей, на которых они смонтированы. Это обеспечивает ламинарное обтекание находящихся за ними поверхностей и вертикальную составляющую силы тяги. Нижнюю половину внутренней поверхности ВКД плавно сопрягают с верхней поверхностью передней ПМУ и с вертикальными стенками АШП, с образованием полукольцевого участка ПМУ, плавно разворачивающегося в верхнюю поверхность передней ПМУ с прямолинейной образующей. При этом передняя ПМУ, ВКД с двигателем и задняя ПМУ вместе образуют единую конструктивную группу - пропульсивный комплекс, который вместе с АШП и дополнительными плоскостями малого удлинения представляет собой пропульсивно-несущий комплекс экраноплана.
Указанная конструктивная группа является базовой для всех возможных вариантов транспортных средств, создаваемых на основе настоящей группы изобретений. При добавлении вертикального хвостового оперения, вертикальных и горизонтальных рулей образуется конструкция, которая является необходимой и достаточной для создания экранопланов типа А. Добавлением к конструкции зкраноплана типа А плоскостей большого удлинения - консолей, снабженных элеронами и механизацией, которые монтируют на боковых торцах дополнительных плоскостей малого удлинения, создают пропульсивно-несущий комплекс экранопланов типов В и С. При этом принадлежность к конкретному типу определяется размахом и площадью консолей, техническими правилами, примененными при строительстве и сертификации.
Указанная конструктивная группа обеспечивает формирование под ней трех разных воздушных подушек: в границах ее проекции на горизонтальную плоскость статической ВП (СтВП), под передней ПМУ - динамической ВП (ДВП) и под задней ПМУ - статодинамической ВП (СДВП).
В крейсерском режиме над указанной конструктивной группой образуется область повышенного воздушного разрежения с уменьшенной неравномерностью в продольном направлении. Боковыми ограждениями воздушных подушек являются внутренние поверхности АШП (или боковые поверхности фюзеляжа и АШП). Носовой щиток передней ПМУ является передним ограждением статической ВП, а ее флапероны выполняют функцию заднего ограждения динамической ВП и переднего ограждения статодинамической ВП. Флапероны задней (задних) ПМУ при выполнении взлета, руления и посадки выполняют функции заднего ограждения статической (статических) ВП, а в полете функции заднего ограждения статодинамической (статодинамических) ВП. При этом естественным образом обеспечивается значительно большее расстояние между реальными фокусами по высоте и углу атаки в сравнении с аналогичным расстоянием между фокусами цельного центроплана с эквивалентными геометрическими размерами. Это облегчает выполнение условий обеспечения собственной статической и динамической устойчивости и расширяет диапазон допустимых центровок, что ведет к повышению безопасности полета и транспортных возможностей.
Выполнение центроплана в виде указанной конструктивной группы или составленного из таких групп обеспечивает разные условия образования подъемных сил и разный характер взаимодействия передней и задней частей центроплана с земной поверхностью. Кинетическую энергию свободно набегающего потока реализует передняя ПМУ, под которой образуется динамическая воздушная подушка, задняя плоскость по всему размаху обдувается движителем, который за счет поддува создает под ней область повышенного статического давлении - статическую ВП с расходом воздуха через заднюю кромку флаперонов, которая опирается на уже сжатый передней плоскостью слой воздуха. Таким образом, в полете, с точки зрения формирования подъемных сил задняя часть экраноплана поддерживается статической и динамической воздушными подушками или, что то же самое, одной статодинамической ВП.
Другим вариантом полета при соответствующей мощности двигателей будет являться режим, при котором реактивные струи движителей, вследствие действия эффекта Коанда, будут образовывать струйные закрылки, которые за счет увеличения эффективной длины хорд ПМУ, кривизны их профилей и реактивных сил струй движителей будут увеличивать несущую способность составного центроплана без существенного увеличения силы сопротивления. Это соответствует конструктивному увеличению хорды эквивалентного крыла и приведет к увеличению высоты экранного полета, то есть к повышению мореходности и безопасности, или позволит уменьшить режим работы двигателей с сохранением текущей высоты, то есть улучшить экономичность.
Кроме этого, отсос винтокольцевым движителем массы воздуха по размаху передней, частично полукольцевой ПМУ, радикально меняет как форму продольного распределения воздушного разряжения, так и его величину по сравнению с этими характеристиками обычного крыла аналогичного размаха при обтекании свободным потоком. Как указано выше, исследованиями ЦАГИ [26] доказан прирост тяги до 30%, который обеспечивает кольцевой центроплан крыла, и сделаны выводы о таком же эффекте при полукольцевом центроплане. В соответствии с этими рекомендациями, по настоящей группе изобретений кольцевая поверхность ВКД плавно сопряжена с полукольцевой частью передней ПМУ и далее в нос, плавно разворачивается в верхнюю поверхность передней ПМУ. В присутствии боковых вертикальных ограждений (АШП и фюзеляж) это обеспечивает протяженность полукольцевого участка и увеличение засасывающего эффекта над передней ПМУ. В сумме с вертикальной составляющей прироста тяги, за счет кольцевого участка передней ПМУ, увеличивается часть общей подъемной силы, которая образуется на ее верхней поверхности.
Таким способом организации обтекания ПМУ составного центроплана обеспечиваются разные условия взаимодействия передней и задней его частей с набегающим потоком и с земной поверхностью. То есть решается задача ослабления «вредных» составляющих в динамической системе «воздушный поток - крыло - опорная поверхность» и сохранения «полезных».
С помощью данного способа формирования подъемных сил можно создавать ЛА с повышенной безопасностью при большом количестве вариантов конструктивного исполнения, которые будут в наибольшей степени соответствовать конкретным условиям применения и будут обладать особенностями, к которым относятся:
- повышенная безопасность полета и выполнения маневров;
- улучшенное распределение масс аппарата в контуре горизонтальной площади;
- повышенная жесткость конструкции, представляющая собой по всем трем осям схему силового многоугольника, что позволяет уменьшить собственный вес конструкции;
- расширения диапазона эксплуатационных центровок вследствие расширения возможностей по продольной балансировке;
- отсутствие потерь на балансировку, свойственных обычным самолетным схемам;
- улучшение моментных характеристик относительно поперечной оси вследствие расположения двигателей с движителями вблизи центра масс как в продольном направлении, так и по высоте и отсутствия вынесенного далеко назад, высоко расположенного стабилизатора и вынесенных далеко вперед поддувных или маршевых движителей;
- увеличенная несущая способность;
- расширенная функциональность;
- повышенная маневренность;
- отсутствие пыле- и брызгообразования в передней полусфере.
В случае многомоторной компоновки моменты сил тяги движителей передней и задней групп (и их вертикальных составляющих) частично или полностью взаимно компенсируются. Так как движители имеют установочные углы, то линии векторов сил тяги лежат выше и ниже ЦМ. То есть одновременное увеличение или уменьшение режима работы всех двигателей оказывает минимальное влияние на балансировку ЭП. Такое расположение движителей увеличивает несущую способность центроплана и маневренность (приемистость) ЭП по вертикали. Тяговые характеристики улучшены за счет применения, как указано выше, полукольцевых ПМУ («Эффект Бартини») и за счет последовательного увеличения (мультиплицирования) скорости потока воздуха, который проходит сквозь движители.
Особенность ЛА по данной группе изобретений, как указывалось выше, - повышенная длина хорды эквивалентной несущей плоскости, посредством которой реализуется экранный эффект. Это результат максимального использования габаритной длины ЛА (фюзеляжа) и влияния струйных закрылков. Данная особенность существенно увеличивает фактическую высоту полета в режиме экранного эффекта по сравнению с ЭП такой же длины и выполненными по другим компоновкам. Кроме этого, центроплан, составленный из относительно тонких ПМУ, расположенных в потоках от движителей, которые засасывают слой воздуха с верхней поверхности и под острым углом направляют его под нижнюю поверхность, создает разность давлений, превышающую это значение у крыла с аналогичными размерами и большой относительной толщиной профиля, форма которого близка к линии аппроксимации, проходящей от носика профиля передней ПМУ к точке, находящейся за хвостиком профиля задней ПМУ снизу, - через задние кромки флаперонов ПМУ, а сверху через верхние половины ВКД. При этом составной центроплан обладает существенно меньшим лобовым сопротивлением потому, что, во-первых, суммарная фактическая площадь миделя ПМУ и движителей меньше площади миделя эквивалентного, сплошного крыла, во-вторых, у составного центроплана со свободным потоком взаимодействует только передняя ПМУ, в-третьих, воздействие движителей приводит к другому характеру обтекания и уменьшению профильного и индуктивного сопротивлений по сравнению с эквивалентным, сплошным крылом.
Если работу сплошного центроплана в воздушном потоке обозначить как пассивный способ создания подъемной силы, то работа составного центроплана с предлагаемым способом обдува будет являться активным способом создания подъемных сил с улучшенным аэродинамическим результатом.
Для обеспечения амфибийности и безаэродромности на всех ЭП по данной группе изобретений реализовано взлетно-посадочное устройство - максимально возможная по размерам, статическая воздушная подушка высокого давления (СтВП). Наличие шасси на ВП увеличенной площади существенно снижает удельную нагрузку на ВП. Это снижает потребную величину избыточного давления в СтВП и, соответственно, потребную мощность двигателей на взлете, что улучшает экономичность взлета и движения на ВП. Шасси на ВП увеличенной площади улучшает взлетно-посадочные характеристики и повышает общую безопасность полета. В частности, повышается безопасность как предусмотренных посадок на любые ровные участки суши или на воду, так и выполнение вынужденных посадок при возникновении особых случаев в полете.
Техническая и экономическая эффективности СтВП обеспечены возможностью использования практически всей мощности маршевых движителей для статической воздушной разфузки, отсутствием дополнительных двигателей и вентиляторов, отсутствием поворотных заслонок, дефлекторов, щитков и трубопроводов для поворота реактивных струй, отсутствием механизмов поворота движителей или двигателей (за исключением случая реализации вертикального взлета, посадки), полным использованием импульса реактивных струй движителей для создания избыточного давления в полости СтВП при неизменном положении движителей и двигателей.
Как указано выше, за счет установочных углов движителей возникают вертикальные составляющие сил тяги, которые суммируются с аэростатической и аэродинамической подъемными силами. Это облегчает старт и движение на СтВП, а также улучшает устойчивость и управляемость на этих режимах.
Дополнительная полноповоротная горизонтальная рулевая плоскость, выполненная по размаху задней (последней) ПМУ и смонтированная над ее элевонами с возможностью обтекания ее верхней частью струи ВКД, обеспечивает дополнительные подъемную силу и управляемость, аэродинамическое торможение и реверс.
Дополнительно к мерам обеспечения естественной продольной статической и динамической устойчивости обеспечено полное демпфирование колебаний по тангажу путем управления величинами передней и задней подъемной сил. Передней - как функции угла тангажа по типу глубокой отрицательной обратной связи, а задней по типу положительной обратной связи. Управления величинами передней и задней подъемной сил осуществляется с помощью автоматического динамического управления углом отклонения флаперонов соответственно передней и задней ПМУ. Поскольку такое управление может быть реализовано с помощью обычной механической проводки, связывающей имеющиеся конструктивные элементы - рули высоты и флапероны ПМУ, то есть без использования сложной системы автоматического управления и демпфирования (САУ и САД), - это можно рассматривать как еще одну составляющую свойства естественной продольной стабилизации и демпфирования. В то же время система динамического управления положением флаперонов может быть выполнена и с помощью известных элементов САУ.
Расширение функциональности, то есть расширение круга задач, решаемых семейством летательных аппаратов на основе данной группы изобретений, обеспечивается как наличием ВПУ на статической воздушной подушке и высокими летно-техническими параметрами, так и большим количеством вариантов конкретного выполнения на основе базового принципа. Поскольку технически базовый принцип реализован в виде базовой конструктивной группы, то на ее основе может быть изготовлен ряд унифицированных модулей, на основе которых, путем пространственной и количественной компоновки, могут создаваться экранопланы для решения большого круга практических задач. Типы применяемых аэродинамических профилей ПМУ, их относительная толщина, установочные углы ПМУ и ВКД зависят от назначения экраноплана. Для более нагруженных и тихоходных применяются увеличенные толщины профилей, увеличенные установочные углы и увеличенные диаметры ВКД. Кроме этого, область применения расширяется за счет возможности выполнения экранопланами, построенными на основе предлагаемых технических решений, псевдовертикального или вертикального взлета- посадки. Причем псевдовертикальные взлеты-посадки обеспечиваются без каких-либо существенных изменений базовых вариантов, а для вертикальных взлетов- -посадок требуется увеличение диаметров ВКД, мощности двигателей и обеспечение поворота ПМУ (или части ПМУ) с движителями вокруг их поперечных осей в вертикальное положение. Экономичность, эффективность и безопасность режима висения по сравнению с вертолетами существенно повышаются за счет отсутствия сложного и тяжелого главного редуктора и трансмиссии на рулевой винт, отсутствия вращающихся лопастей несущего винта далеко за габаритами фюзеляжа, за счет применения четырех и более движителей для создания вертикальной тяги, а также за счет большой площади горизонтальных несущих плоскостей, под которыми образуются области повышенного давления воздуха. При этом такой экраноплан будет иметь значительно большую дальность горизонтального полета, большую скорость и лучшую экономичность. Вариативность данной группы изобретений позволяет создавать транспортные средства для выполнения таких функций, которые в настоящее время присущи только обычным судам.
Следующим фактором, непосредственно влияющим на безопасность полета и сферу применения экранопланов, является способ выполнения полета. Практически все построенные экранопланы применяют самолетный способ выполнения полета, который включает горизонтальный участок разбега на взлете, изменение угла тангажа для получения необходимой подъемной силы на всех этапах полета и при выполнении маневров, пробег после приземления. В отличие от этого, ключевым моментом предлагаемого способа является выполнение всех элементов и этапов полета на высотах, ниже безопасных (или на высотах выделенных для полетов экранопланов - до 150 м над поверхностью моря) с постоянным, равным нулю углом тангажа. Безопасность повышается за счет того, что, с одной стороны, упрощается техника пилотирования на самых опасных участках полета - при выполнении посадки, при маневрировании в режиме экранного эффекта и на переходных режимах. Это приводит к снижению эмоционального напряжения пилота и само по себе является положительным фактором. С другой стороны, постоянное горизонтальное положение экраноплана в экранном или околоэкранном полете, соответствующее посадочному положению, существенно упрощает действия экипажа при выполнении как запланированной, так и вынужденной посадки, при исправлении воздействия внешних возмущений и ошибок в технике пилотирования. Хотя при таком способе выполнения полета уменьшается сама возможность совершения экипажем ошибочных действий. Постоянное горизонтальное положение фюзеляжа повышает комфортность длительного пребывания на борту пассажиров и экипажа, а также повышает безопасность полета при транспортировке грузов. Способ выполнения полета с постоянным углом тангажа концептуально связан с предлагаемыми по данной группе изобретений способами формирования системы аэродинамических сил и конструктивными решениями для реализации этих способов. То есть компоновки и конкретные конструкции экранопланов таковы, что не требуют изменений тангажа при выполнении полета, от взлета до посадки.
Повышение удобства эксплуатации достигается возможностью выполнения входных дверей и грузовых люков, обеспечивающих удобные и безопасные пути и способы посадки - высадки пассажиров, погрузки - разгрузки грузов, как на суше, так и в положении «на плаву». Компоновочные возможности позволяют создавать экранопланы с прямолинейным бортовым привальным брусом в швартовочной конфигурации для обеспечения швартовки к существующим портовым сооружениям или к обычным судам.
Удобство технического обслуживания обеспечивается отсутствием высоко расположенных двигателей, узлов и заправочных горловин, требующих ежедневного доступа, техническое обслуживание может выполняться без специального оборудования - всевозможных стремянок или вспомогательных плавсредств, и может проводиться на плаву. На сверхтяжелых экранопланах доступ к двигателям может быть обеспечен изнутри крыла.
Для качественной проверки летных и стабилизационных возможностей ЭП, выполненного на основе данной группы изобретений, была изготовлена и испытана свободнолетающая модель ЭП. Центроплан модели составлен из трех ПМУ с перекрытием в горизонтальной плоскости. Передняя ПМУ снабжена свободно подвешенным закрылком, который посредством тяги и качалок соединен с осью носового руля высоты - ДУА, половины которого свободно подвешены в носовых частях дополнительных ПМУ. Модель снабжена стреловидными консолями. Для продольной балансировки задняя ПМУ имеет возможность изменения установочного угла и изменения угла отклонения закрылка, который после настройки остается фиксированным. Поскольку модель свободнолетающая (без движителя), то существует только одна оптимальная скорость полета, одна оптимальная центровка и один оптимальный угол между плоскостями закрылка передней ПМУ и носового руля высоты, которые обеспечивают наилучшие характеристики полета. Центроплан модели имеет длину эквивалентной хорды 310 мм. Центровка - 37% по САХ центроплана.
При горизонтальном старте с помощью резиновой катапульты с поверхности пола модель (без увеличения тангажа) поднимается на высоту 300-500 мм, стабильно летит некоторое расстояние на одной постоянной высоте, затем по мере потери скорости плавно снижается (без изменения угла тангажа) и приземляется в горизонтальном положении. Отсутствует кабрирование, характерное для обычных самолетных схем при неверно выбранной центровке или превышении оптимальной стартовой скорости. При этом отчетливо виден горизонтальный участок полета в режиме экранного эффекта, высота которого во всех случаях превышает хорду центроплана.
При полете на высоте, превышающей в 2-3 раза хорду ЦП, и пролете над границей ступенчатого повышения опорной поверхности, которое уменьшает фактическую высоту полета, наблюдается скачкообразное увеличение угла тангажа, что свидетельствует о значительном экранном эффекте для данной компоновки на высотах, превышающих длину хорды составного центроплана.
Отчетливо проявляется влияние угла между плоскостями закрылка передней ПМУ и носового руля высоты. При уменьшении этого угла уменьшается высота полета, а при увеличении она увеличивается. Подтверждено полное демпфирование колебаний в продольном канале. Общее расстояние, проходимое моделью (с пробегом 2-3 м) от старта до полной остановки, на два порядка превышает высоту полета и составляет 25-30 м.
Работоспособность заявленного способа формирования аэродинамических сил и устройств системы автостабилизации полностью подтверждена летными испытаниями нескольких вариантов компоновки двухмоторной радиоуправляемой модели.
Краткое описание чертежей
Предлагаемое изобретение поясняется чертежами с приведением некоторых вариантов конкретного выполнения.
Фиг.1 - Схема взаимного расположения центра масс, фокуса по высоте и фокуса по углу атаки, обеспечивающая собственную статическую и динамическую устойчивость.
Фиг.2 - Базовая конструктивная группа (БКГ). Общий вид.
Фиг.3 - Пропульсивно-несущий комплекс экраноплана (ПНК). Общий вид.
Фиг.4 - Пропульсивный комплекс (ПК). Разрез по диаметральной плоскости. Механизация в положении для создания статической ВП. Общий вид.
Фиг.5 - Схема обтекания ПК в режиме статической ВП.
Фиг.6 - Схема обтекания ПК в режиме экранного полета.
Фиг.(7-10) - Варианты экранопланов с одной БКГ в продольном направлении. Общие виды.
Фиг.7 - Легкий многоцелевой экраноплан типа «А». Остекление показано на Фиг.9 (а-с).
Фиг.8 - Легкий многоцелевой экраноплан. Типы «В» и «С».
Фиг.9 - Патрульный экраноплан типа «А». Обтекатель пневматиков не показан.
Фиг.10 - Легкий или средний транспортный экраноплан. Типы «В» и «С».
Фиг.11 (а) - Экраноплан по Фиг.7. Вид сбоку.
Фиг.11 (b) - Экраноплан по Фиг.7. Вид сверху.
Фиг.11 (с) - Экраноплан по Фиг.7. Вид спереди, масштаб увеличен.
Фиг.12 (а) - Экраноплан по Фиг.8. Вид сбоку.
Фиг.12 (b) - Экраноплан по Фиг.8. Вид сверху.
Фиг.12 (с) - Экраноплан по Фиг.8. Вид спереди.
Фиг.13 (а) - Экраноплан по Фиг.9. Вид сбоку.
Фиг.13 (b) - Экраноплан по Фиг.9. Вид сверху.
Фиг.13 (с) - Экраноплан по Фиг.9. Вид спереди.
Фиг.14 - Экраноплан по Фиг.8. Общий вид снизу.
Фиг.15 - Экраноплан по Фиг.9. Общий вид снизу.
Фиг.16 (а) - Экраноплан по Фиг.10. Вид сбоку.
Фиг.16 (b) - Экраноплан по Фиг.10. Вид сверху.
Фиг.16 (с) - Экраноплан по Фиг.10. Вид спереди.
Фиг.16 (d) - Экраноплан по Фиг.10. Общий вид.
Фиг.16 (е) - Экраноплан по Фиг.10. Общий вид снизу.
Фиг.17 - Общий вид пропульсивного комплекса правого борта с двумя БКГ. Фюзеляж не показан. Механизация в положении крейсерского режима.
Фиг.18 - Общий вид по Фиг.17. Механизация в положении вертикального взлета-посадки.
Фиг.19 - Схема обтекания ПК по Фиг.17. Режим экранного эффекта.
Фиг.20 - Схема обтекания ПК по Фиг.18. Режим вертикального взлета.
Фиг.21 - Схема обтекания ПК по Фиг.17. Режим статической ВП.
Фиг.22 - Средний или тяжелый экраноплан с ПК по Фиг.17. Типы «В» и «С». Общий вид.
Фиг.23 - Экраноплан по Фиг.22. Общий вид снизу. Механизация для крейсерского режима.
Фиг.24 (а) - Экраноплан по Фиг.22. Вид сбоку.
Фиг.24 (b) - Экраноплан по Фиг.22. Вид сверху.
Фиг.24 (с) - Экраноплан по Фиг.22. Вид спереди.
Фиг.25 - Экраноплан по Фиг.22. Общий вид снизу. Механизация в положении для СтВП.
Фиг.26 - Экраноплан по Фиг.22. Общий вид сзади.
Фиг.27 - Средний или тяжелый экраноплан с ПК. Типы «В» и «С». Общий вид.
Фиг.28 (а) - Экраноплан по Фиг.27. Вид сбоку.
Фиг.28 (b) - Экраноплан по Фиг.27. Вид сверху.
Фиг.28 (с) - Экраноплан по Фиг.27. Вид спереди.
Фиг.28 (d) - Экраноплан по Фиг.27. Вид снизу. Примерная форма и граница ДВП.
Фиг.29 - Экраноплан по Фиг.27. Общий вид снизу. Механизация для крейсерского режима.
Фиг.30 - Экраноплан по Фиг.27. Общий вид снизу. Механизация в положении для СтВП.
Фиг.31 - Свободнолетающая модель. Общий вид.
Фиг.32 - Свободнолетающая модель. Общий вид. Левые плоскости и АШ не показаны.
Фиг.33 (а) - Модель по Фиг.31. Вид сбоку. Разрез.
Фиг.33 (b) - Модель по Фиг.31. Вид сверху.
Фиг.33 (с) - Модель по Фиг.31. Вид спереди.
Фиг.34 - Механический привод системы автостабилизации и демпфирования. Принципиальная схема. Общий вид пропульсивного комплекса левого борта.
Фиг.35 - Схема обтекания в установившемся полете.
Фиг.36 - Работа системы автостабилизации при увеличении угла тангажа.
Фиг.37 - Работа системы автостабилизации при уменьшении угла тангажа.
Варианты осуществления изобретения
Как указано выше, на основе данной группы изобретений могут быть созданы экранопланы во всем диапазоне весовых категорий - от сверхлегких до сверхтяжелых при большом количестве вариантов конкретного конструктивного исполнения. Поэтому сначала будут описаны конструкции, которые реализуют единый базовый принцип и содержат элементы, присущие экранопланам по данной группе изобретений.
Пропульсивно-несущий комплекс экраноплана содержит две плоскости малого удлинения (ПМУ) - переднюю ПМУ 1 с носовым щитком 2, полукольцевым участком 3 верхней поверхности и флаперонами 4 и заднюю ПМУ 5 с винтокольцевым движителем (ВКД) 6, двигателем 7 и флаперонами 8. Торцы ПМУ 9 объединены аэродинамическими шайбами-поплавками (АШП) 10. Установочный угол передней ПМУ 1 равен среднему наивыгоднейшему углу атаки для расчетного диапазона крейсерских высот и скоростей полета в режиме экранного эффекта с учетом влияния отсоса потока и пограничного слоя с ее верхней поверхности. Установочный угол задней ПМУ 5 может быть меньше, равным или больше установочного угла передней ПМУ 1 и определяется требованиями к летно-техническим характеристикам конкретного экраноплана. При этом под ПМУ образованы полости статической (СтВП) 11, динамической (ДВП) 12 и статодинамической (СДВП) 13 воздушных подушек (ВП).
Внутренние поверхности 14 АШП 10 являются боковыми ограждениями воздушных подушек. При движении в режиме статической ВП ее передним ограждением является носовой щиток 2, а задним ограждением флапероны 8 задней ПМУ 5. В полете флапероны 4 передней ПМУ 1 выполняют функцию заднего ограждения динамической ВП и одновременно переднего ограждения статодинамической ВП, при этом флапероны 8 задней ПМУ 5 являются задним ограждением статодинамической ВП. Задние кромки флаперонов 4 и 8 в нейтральном положении, соответствующем расчетному режиму полета, могут лежать в одной или разных горизонтальных плоскостях. Их взаимное расположение зависит от типа экраноплана, его назначения, удельной нагрузки на несущую плоскость, общей компоновки, включающей относительные размеры элементов, составляющих пропульсивно-несущий комплекс, и количества примененных базовых конструктивных групп вдоль продольной оси.
На верхних кромках 15 концевых аэродинамических шайб-поплавков 10 смонтированы дополнительные плоскости малого удлинения (ДПМУ) 16. В носовой части ДПМУ 16 выполнены носовые рули высоты 17 (элевоны), а в хвостовой части хвостовые рули высоты 18 (элевоны). Хвостовые рули 18 могут являться элевонами плоскостей большого удлинения - консолей 19, смонтированных на боковых торцах хвостовых частей ДПМУ 16. Консоли снабжены предкрылками 20, элеронами 21 и элевонами 22. Консоли 19 размещены так, что проекция результирующего центра давления консолей 19 и ДПМУ 16 на продольную ось лежит между центром масс и задней кромкой задней ПМУ 5. Это улучшает статическую продольную устойчивость, т.к. смещает назад фокус по углу атаки всего несущего комплекса экраноплана. При этом расширяется диапазон допустимых центровок.
На верхних поверхностях ПМУ, начиная с лобовой части передней ПМУ 1, размещены один или несколько интерцепторов 23. Интерцепторы 23 при их обдуве входящей или выходящей струей ВКД 6 обеспечивают дополнительные подъемные силы при малых поступательных скоростях - на взлете, на рулении, в наборе высоты с большим углом подъема и на висении.
Над флаперонами задней ПМУ 5 со смещением в хвост установлена рулевая плоскость 24 центроплана 25. Плоскость 24 позволяет получать прирост общей подъемной силы на всех этапах полета. При рулении на статической ВП плоскость 24 обеспечивает начальную продольную балансировку (горизонтальное положение фюзеляжа), а на посадке может выполнять функцию тормозного щитка или рабочего органа воздушного реверса.
Двухкилевое вертикальное оперение 26 с рулями поворота 27 установлено на хвостовых оконечностях АШП 10.
Перед ВКД 6, в границах его диска, установлены горизонтальные плоскости 28 управления вектором тяги, имеющие крыльевой профиль. Плоскости 28 шарнирно смонтированы в виде решетки так, что их задние кромки лежат в плоскости, параллельной плоскости передней кромки кольца 29 ВКД 6.
Потребность в применении интерцепторов 23, рулевой плоскости 24 и плоскостей 28 управления вектором тяги определяется исходя из назначения экраноплана, степени его нагруженности и условий эксплуатации. Например, малонагруженные, высокоскоростные экранопланы с большой энерговооруженностью могут эксплуатироваться без них.
Нижняя половина внутренней поверхности кольца 29 плавно сопряжена с верхней поверхностью 30 передней ПМУ 1 и внутренней поверхностью 14 АШП 10 с образованием полукольцевого участка 3 ПМУ 1, который плавно разворачивается вперед в верхнюю поверхность 30 передней ПМУ 1 с прямолинейной образующей. Нижняя половина задней кромки кольца 29 плавно сопряжена с внутренней поверхностью 14 АШП 10 по направлению «в хвост» так, что обеспечено отклонение элевонов 4 вверх от нейтрального положения.
Соотношение диаметра входного среза кольца 29 и размаха верхней поверхности 30 передней ПМУ 1 может быть меньше, больше или равно единице. Соотношение диаметра выходного среза кольца 29 и длины сопряженной с ним передней кромки 31 задней ПМУ 5 может быть меньше, больше или равно единице. Эти соотношения зависят от общей компоновки и от конструктивных решений, которые в наибольшей степени удовлетворяют требованиям к техническим характеристикам конкретного экраноплана. Передняя кромка 31 задней ПМУ 5 может быть расположена как на плоскости выходного среза кольца 29, так и внутри кольца. Это расположение определяется задачей получения наилучших характеристик работы конкретного ВКД на всех режимах. Передняя кромка 31 задней ПМУ 5 выполнена острой. Передняя кромка 32 флаперонов 4 передней ПМУ 1 расположена в плоскости выходного среза кольца 29. Верхняя поверхность флаперонов 4 при их нейтральном положении по касательной сопряжена с образующей внутренней поверхности кольца 29, лежащей в диаметральной плоскости. Между нижней поверхностью 33 задней ПМУ 5 и верхними поверхностями флаперонов 4 образован воздушный канал 34, через который под центроплан подают нижнюю часть реактивной струи 35 ВКД 6. ВКД 6 монтируют с установочным углом, равным или близким установочному углу задней ПМУ 5, который обеспечивает наилучшее обтекание ее поверхностей.
На верхней поверхности 30 и под интерцептором 23 выполнены входные отверстия (или щели) системы эжекции пограничного слоя (не показана), выходные отверстия (или щели) которой выполнены на внутренней поверхности кольца 29.
Для экранопланов по данной группе изобретений возможно создание нескольких вариантов дополнительной системы автоматической стабилизации и демпфирования колебаний по тангажу (САД). В общем случае она содержит датчик угла атаки (ДУА), канал передачи управляющих сигналов, исполнительный механизм (механизмы) и рабочий орган (органы), которыми являются флапероны ПМУ. Особенностью здесь является то, что датчиками угла атаки могут служить свободно ориентирующиеся в потоке (т.е. при свободном рычаге управления) рули высоты: или передние, или задние, или одновременно и передние, и задние.
Конструкция системы может быть выполнена или полностью механической, или смешанной - с применением электрических, или гидравлических, или оптических элементов.
На Фиг.34-37 показан общий вид и принцип действия варианта полностью механической системы автоматической стабилизации и демпфирования, которая применима преимущественно на легких летательных аппаратах. Система содержит датчики угла атаки (ДУА) - они же рули высоты 17 и 18, которые одновременно выполняют функции и исполнительного механизма, и силового привода, канал передачи управляющих сигналов в виде механической проводки 36 и рабочие органы, которыми являются флапероны 4 и 5 передней и задней ПМУ.
Системы управления флаперонами 4 и 5 выполнены с возможностью регулирования угла 37 между плоскостями нейтрального (по крену) положения флаперонов и плоскостями нейтрального положения ДУА (рулей высоты 17 и 18). Регулирование угла 37 осуществляется путем изменения установочного угла нейтрального положения флаперонов ПМУ и фиксацией нового значения угла 37 в случае, например, электродистанционной системы управления. В случае соединения рулей высоты 17 и 18 с флаперонами ПМУ 4 и 5 механической проводкой регулировка производится изменением длины механической проводки. Канал передачи управляющего сигнала (механическая проводка) имеет механизм отключения (рассоединения) ДУА и флаперонов (не показан).
Руль высоты 17 может быть выполнен в виде двух элевонов, тогда каждый элевон руля при выполнении им функции ДУА может иметь индивидуальное соединение с соответствующим флапероном 4 ПМУ (Фиг.34). Таким способом может быть реализован один из вариантов поперечного канала управления флаперонами 4 ПМУ.
Под управлением ДУА (переднего руля высоты 17) флапероны 4 передней ПМУ отклоняются в ту же сторону, что и ДУА. Это обеспечивает управление величиной передней подъемной силы 38 как функции угла тангажа по типу глубокой отрицательной обратной связи.
Под управлением ДУА (хвостового руля высоты 18) флапероны 5 задней ПМУ отклоняются в противоположную сторону. Это обеспечивает управление величиной задней подъемной силы 39 как функции угла тангажа по типу положительной обратной связи.
Возможны другие варианты соединений в простейшей системе автостабилизации и демпфирования колебаний по тангажу, например:
а) ДУА - передний руль высоты и рабочий орган - задние флапероны;
б) ДУА - задний руль высоты и рабочий орган - передние флапероны;
в) ДУА - передний руль высоты и рабочий орган - рулевая плоскость центроплана 24;
г) вариант в) и плюс динамическое управление задними флаперонами от автопилота и т.д.
Фиг.35 - Схема обтекания в установившемся полете. Рули 17 и 18 (ДУА) устанавливаются по потоку. После балансировки угол 37 фиксируется в системе управления. Система уравновешена.
На Фиг.36 - Кабрирование. Угол атаки рулей становится положительным. Скоростной напор повышает давление на нижних поверхностях рулей 17 и 18. Это давление поворачивает рули вокруг их осей, и рули снова устанавливаются по потоку. Посредством тяг и качалок носовой руль 17 отклоняет флапероны 4 вверх, а хвостовой руль 18 отклоняет флапероны 8 вниз. Возникающие при этом на ПМУ приращения подъемных сил ΔY создают пикирующий момент М, который восстанавливает нарушенное равновесие.
На Фиг.37 - Пикирование. Механизм действия такой же, как на Фиг.36, но в обратную сторону. Угол атаки рулей 17 и 18 становится отрицательным, и давление повышается на их верхних поверхностях. Устанавливаясь снова по потоку, рули 17 и 18 отклоняют флапероны 4 вниз, а флапероны 8 вверх. На ПМУ возникают приращения подъемных сил ΔY, которые создают кабрирующий момент М, который приводит систему в исходное состояние.
На Фиг.1 показано условие обеспечения собственной статической и динамической устойчивости экраноплана, при котором фокус по высоте 40 должен быть расположен впереди центра масс 41. При этом центр масс 41 должен быть расположен между фокусом по высоте 40 и точкой 42 середины расстояния между фокусом по высоте 40 и фокусом по углу атаки 43.
Работа пропульсивно-несущего комплекса в режиме статической ВП показана на Фиг.5. Для выполнения взлета и движения на статической ВП носовой щиток 2 и флапероны 8 задней ПМУ отклоняют в крайнее нижнее положение, при котором их задние кромки лежат на земной (водной) поверхности, образуя вместе с внутренними поверхностями 14 АШП замкнутое ограждение статической ВП. Интерцептор 23 и плоскости 28 управления вектором тяги отклоняют на углы, обеспечивающие максимальный прирост подъемной силы. Рулевую плоскость 24 центроплана устанавливают в положение, обеспечивающее продольную балансировку (горизонтальность фюзеляжа) для расчетной центровки в режиме СтВП. Флапероны 4 передней ПМУ устанавливают в нейтральное положении или отклоняют вверх до горизонтального положения их нижней поверхности. Двигателю устанавливают взлетный режим и выполняют взлет и разгон на статической ВП. Струя 35 нижней половины ВКД 6 создает в полости статической ВП избыточное статическое давление. Струя 44 верхней половины ВКД 6 создает над задней ПМУ область разрежения, а при обтекании рулевой полноповоротной плоскости 24 аэродинамическую силу, величину и направление которой устанавливают в соответствии с центровкой и условиями взлета.
Поток воздуха 45 над передней ПМУ 1, всасываемый ВКД 6, создает дополнительную подъемную силу за счет увеличенных эффективной кривизны верхней дужки и относительной толщины профиля передней ПМУ, которые обеспечиваются интерцептором 23.
Дополнительная подъемная сила создается за счет разреяжения на верхней поверхности 30, которое возникает вследствие отсоса пограничного слоя системой его эжекции на внутреннюю поверхность кольца 29.
Дополнительная подъемная сила образуется на плоскостях 28 управления вектором тяги, которые обдуваются всасываемым потоком 45 под углом атаки, соответствующим углу максимальной подъемной силы их профилей. Эта подъемная сила создается непосредственной работой ВКД и прикладывается к его элементам, поэтому она складывается с вертикальной составляющей силы тяги Pv, что приводит к отклонению результирующего вектора силы тяги Р вверх.
В процессе разгона экраноплана пропорционально увеличению скорости плавно убирают носовой щиток 2, интерцептор 23, а флапероны 8 задней ПМУ и плоскости 28 устанавливают в положение для экранного полета или дальнейшего набора высоты. В процессе устойчивого движения на статической ВП флапероны 4 передней ПМУ и рулевую плоскость 24 переводят в положение для заданной высоты экранного полета или набора высоты. Поскольку установочные углы ПМУ 1 и 5 и ВКД 6 достаточно большие, то нет необходимости в увеличении угла тангажа для набора высоты. Поэтому набор высоты выполняют при горизонтальном положении фюзеляжа. Необходимую подъемную силу обеспечивают соответствующими углами отклонения флаперонов ПМУ и режимом работы двигателя. Рулями высоты поддерживают горизонтальность фюзеляжа. Продольную балансировку обеспечивают как дифференцированным отклонением флаперонов 8, так и рулевой плоскостью 24, управление которыми выполняют аналогично управлению триммером руля высоты обычного самолета. При достижении крейсерской скорости на заданной высоте экранного полета устанавливают двигателю соответствующий режим работы. После выполнения продольной балансировки включают систему автоматической стабилизации и демпфирования.
Возможно создание конструкций, обеспечивающих взлет при включенной САД, когда необходимые углы между ДУА и флаперонами ПМУ предустановлены перед взлетом.
Полеты на безопасных высотах или на эшелонах могут выполняться с управлением «по - самолетному», т.е. с изменением угла тангажа рулями высоты и положением механизации ценроплана, обеспечивающим максимальное качество.
На Фиг.6 показано обтекание пропульсивно-несущего комплекса в режиме экранного эффекта и примерное положение центра масс 41, фокусов по высоте 40 и углу атаки 43. Видно, что с невозмущенным набегающим потоком взаимодействует только нижняя поверхность передней ПМУ 46. За счет обдува задней ПМУ 5 под центропланом 25 создается воздушный клин динамической воздушной подушки с большим скосом потока, повышенной толщины. Это равносильно увеличению кривизны профиля центроплана и позволяет для данной конструкции выполнять экономичный полет на большей высоте.
Дополнительные плоскости малого удлинения 16 так же способствуют увеличению высоты экранного полета. Помимо увеличения удлинения суммарной несущей поверхности они препятствуют перетеканию воздуха из зоны повышенного давления под центропланом в зону разрежения над ним. На ДПМУ образуются дополнительные подъемные силы от индуктивных вихрей, а индуктивное сопротивление уменьшается. Это увеличивает качество всего несущего комплекса.
Набор высоты или снижение из горизонтального полета выполняют путем одновременного увеличения или уменьшения величины передней и задней подъемных сил, для чего одновременно увеличивают или уменьшают угол отклонения флаперонов ПМУ, элевонов консолей и (или) увеличивают (уменьшают) режим работы двигателей.
Известно, что в экстренных случаях наиболее эффективным маневром экраноплана для предотвращения столкновения с препятствием является маневр в вертикальной плоскости с выходом из зоны экранного эффекта и последующим возвращением в эту зону.
Для самолетных компоновок такой маневр связан с увеличением угла тангажа (угла атаки), нарушением балансировки, сложностью пилотирования на переходных режимах. При большой скорости и величине изменения тангажа это может привести к выходу на закритические углы атаки и потере управляемости. Поэтому в таких случаях требуется высокий уровень летной подготовки пилота.
В противоположность этому такой маневр на экранопланах по настоящей группе изобретений выполняют при горизонтальном положении фюзеляжа, которое обеспечивают вручную или автопилотом. Для этого одновременно отклоняют флапероны всех ПМУ центроплана (или флапероны ПМУ и закрылки консолей) вниз с помощью одного командного рычага. При выполнении такого маневра автоматически отключается система автостабилизации и демпфирования, описанная выше. В результате этих действий и вследствие увеличения высоты полета нарушается продольная балансировка. Возникающий продольный момент парируют рулями высоты, а балансировку восстанавливают так, как указано выше.
Вертикальная скорость набора высоты будет зависеть от скорости и величины отклонения флаперонов. Произойдет динамический набор высоты без увеличения мощности двигателей. При этом углы атаки необдуваемых движителями плоскостей будут уменьшаться пропорционально вертикальной скорости набора высоты и увеличиваться пропорционально вертикальной скорости снижения. Это создает эффект демпфирования резких изменений вертикальной скорости, что повышает безопасность полета вблизи земной поверхности.
После достижения высоты динамического набора начнется снижение до высоты, на которой обеспечивается горизонтальный полет при новом положении механизации несущих поверхностей. Вариантом для выполнения экстренного маневра по высоте может быть техническое решение, когда при превышении определенного градиента отклонения флаперонов автоматически увеличивается режим работы двигателей. Это позволит продолжать полет на высоте динамического набора.
Предлагаемые по настоящему изобретению компоновки экранопланов и современный уровень техники позволяют создавать системы с гиростабилизацией, которые обеспечат выполнение экстренного вертикального маневра при включенном автопилоте, обеспечивающем нулевой тангаж.
При полете в режиме экранного эффекта выполняют координированные развороты (без скольжения) с необходимым креном и сохранением высоты.
Посадку из полета в режиме экранного эффекта выполняют путем плавного уменьшения мощности двигателей и снижения ЭП до минимально возможной (по внешним условиям) высоты полета. Пропорционально уменьшению скорости отклоняют носовой щиток, флапероны ПМУ, средства аэродинамического торможения и реверса, с переводом ЭП в режим движения на СтВП. Выполняют руление на СтВП или приземление (приводнение) с минимальной или нулевой поступательной скоростью.
Выполняют посадку с любых высот полета с использованием крутой траектории снижения вплоть до парашютирования при горизонтальном положении фюзеляжа. Для этого на текущей высоте полета или на снижении устанавливают минимальный режим работы двигателей, обеспечивающий управляемость и отклоняют механизацию ПМУ в положение, соответствующее движению на СтВП. Пространственное положение ЭП и траекторию снижения (вертикальную и поступательную скорости) корректируют отклонением рулевых поверхностей, отклонением флаперонов ПМУ и режимом работы двигателей. Вертикальный взлет или режим висения выполняют путем одновременного перевода направления векторов результирующих сил тяги движителей в вертикальное положение. Для этого вращают вокруг поперечных осей ПМУ (или часть ПМУ), на которых смонтированы движители до вертикального положения сил тяги и выводят двигатели на взлетную мощность. Пространственное перемещение и стабилизацию ЭП выполняют с помощью флаперонов ПМУ, рулей, изменения направления векторов сил тяги движителей и их величины.
Фиг.(7-10) демонстрируют вариативность настоящей группы изобретений. Показаны общие виды некоторых из возможных вариантов экранопланов с применением одной базовой конструктивной группы и одного движителя в продольном направлении.
На Фиг.11 (а-с) показаны три проекции легкого многоцелевого экраноплана типа «А» по Фиг.7. Остекление показано на Фиг.9 (а-с). Кабина 47 для пилота и пассажиров установлена на передней ПМУ и легко доступна для посадки и покидания через боковые двери 48 (люки). Остекление 49 обеспечивает беспрепятственный обзор в верхней полусфере. Поплавки АШП могут быть выполнены в виде, например, надувных баллонов 50.
На Фиг.12 (а-с) показаны три проекции легкого многоцелевого экраноплана типа «В» и «С» по Фиг.8, который образован добавлением консолей 19 к экраноплану по Фиг.7. Вариантом такой компоновки может быть применение вместо одного ВКД 6 - двух ВКД, рядом расположенных, с меньшими диаметрами колец. Это позволит увеличить размах ПМУ (повысить качество) и уменьшить высоту точки приложения сил тяги.
На Фиг.13 (а-с) показаны три проекции патрульного экраноплана типа «А» по Фиг.9, предназначенного для пограничных, таможенных, рыбоохранных и иных служб. Для улучшения амфибийности, движения по грунту при уменьшенной мощности двигателей и пониженным давлением на грунт поплавки АШП могут быть выполнены в виде, например, многоосного колесного шасси. Колеса выполнены в виде облегченных пневматиков 51 низкого давления с малым относительным диаметром ступиц и прикрыты с внешних сторон обтекателями 52. На крыше кабины установлена автоматическая артиллерийская установка 53 с дистанционным управлением. Входная дверь (люк) 48 выполнена на задней стенке кабины 47, а дополнительные (аварийные) люки 54 на ее бортах. Кабина может быть выполнена бронированной. Фюзеляж 55 выполнен в виде корпуса- лодки со скеговыми обводами. В кормовой части тоннеля 56 установлена транцевая плита 57, которая выполнена демпфированной. Кили скегов 58 и поплавков АШП 10 выполнены в виде гидролыж 59 и лежат в одной плоскости.
На Фиг.14 и Фиг.15 показаны экранопланы по Фиг.8 и Фиг.9. Общий вид снизу при положении механизации пропульсивных комплексов для режима статической ВП.
На Фиг.16 (а-с) показаны три проекции экраноплана типа «В» и «С» по Фиг.10. На основе этой компоновки могут строиться экранопланы общего и специального назначения. Весовые категории: от легких (от 0,5 т) до средних (50-100 т). Фюзеляж 55 может быть выполнен в виде корпуса-лодки с плоскокилеватыми, глиссирующими или скегового типа обводами. Форштевни корпусов могут быть расположены впереди или сзади передней ПМУ. Киль (кили) корпусов, выполненные в виде гидролыж 59, могут выполнять функции опорных поверхностей при стоянке на грунте и могут лежать в одной плоскости с опорными поверхностями АШП. Все опорные поверхности могут быть выполнены демпфированными, из износостойкого материала с малым коэффициентом трения.
Тоннель 56 снабжен носовым щитком 60 и транцевой плитой 57. Линии килей скегов 58 имеют участки подъема 61 в пределах длин статодинамических воздушных подушек второй и последующих ПМУ. Участки подъема 61 служат воздушными каналами, через которые передается избыточное давление в тоннель 56 при создании статической ВП. Между двухкилевым хвостовым оперением 26 выполнен грузопассажирский люк 62.
На Фиг.16 (d-е) показаны общие виды экраноплана по Фиг.10 с обозначением элементов. На виде снизу - механизация в положении для режима статической ВП.
На Фиг.17 показан общий вид пропульсивного комплекса (ПК) правого борта с двумя базовыми конструктивными группами (БКГ) и двумя движителями. Фюзеляж и дополнительные плоскости не показаны. Механизация в положении крейсерского режима. Конструкция предназначена для выполнения вертикального взлета. Кроме этого показана возможность компоновки БКГ в продольном направлении. В поперечном направлении также возможны компоновки с двумя и более БКГ. Таким образом можно составлять пропульсивный комплекс для сверхтяжелых зкранопланов. В конструкции по Фиг.17 вторая и третья ПМУ выполнены одинаковыми. Каждая из них содержит три части: поворотную часть с движителем 63, неподвижную часть 64 и флаперон 8.
На Фиг.18 показана механизация ПК по Фиг.17, установленная в положение для вертикального взлета-посадки.
На Фиг.19 показана схема обтекания ПК по Фиг.17 в режиме экранного эффекта. Фиг.20 - Схема обтекания ПК по Фиг.18 - режим вертикального взлета. Фиг.21 - Схема обтекания ПК по Фиг.17 - режим статической ВП.
На Фиг.22 показана компоновка (2×2) среднего или тяжелого экраноплана с пропульсивным комплексом по Фиг.17. Типы «В» и «С» - общий вид. В данной конструкции нижняя поверхность фюзеляжа 65 выполнена как продолжение нижней поверхности передней ПМУ в виде плоской несущей поверхности с носовым 60 и транцевым 66 щитками. Транцевый щиток 65 вместе с элевонами задних ПМУ 8 образуют заднее ограждение СтВП, а в полете убирается заподлицо с днищем. Плавучесть ЭП обеспечивается поплавками АШП, выполненными в виде жестких обтекаемых глиссирующих полукорпусов 67.
На Фиг.23 - экраноплан по Фиг.22 - общий вид снизу. Механизация в положении крейсерского режима.
На Фиг.24 (а-с) представлены три проекции экраноплана по Фиг.22. На виде спереди (Фиг.24 (с)) показаны траектория и положение консолей при подъеме в швартовочную конфигурацию. Положение механизации для СтВП показано на Фиг.25. Общий вид сзади показан на Фиг.26.
На Фиг.27 показан общий вид варианта компоновки для среднего или тяжелого экраноплана, в которой функции аэродинамических шайб- поплавков выполняют два основных фюзеляжа 55. Она реализует трехточечную опорную схему. Количество ВКД может быть значительно больше. ВКД могут быть расположены одиночно или группами, по сторонам треугольника или по параболе. При этом реактивные струи ВКД будут формировать под общим центропланом куполообразную динамическую ВП. В горизонтальной плоскости линия 68 границы такой ВП может иметь треугольную, ступенчато-треугольную или параболическую форму с вершиной, направленной назад. Это равноценно обратной стреловидности задней кромки несущей плоскости, под которой создается динамическая ВП. Известно, что такая форма задней кромки повышает продольную устойчивость сплошного крыла малого удлинения в режиме экранного эффекта. Поэтому компоновка экраноплана по Фиг.27 позволяет получить дополнительную составляющую продольной устойчивости со стороны динамической ВП. Вариантом компоновки по Фиг.27 является расположение ВКД по сторонам треугольника, вершина которого направлена вперед. В этом случае будут сформированы две динамические ВП с формой в горизонтальной плоскости в виде прямоугольных треугольников, катеты которых совпадают с передней кромкой центроплана и внутренними стенками фюзеляжей. Особенностью данной компоновки является наличие прямолинейного борта фюзеляжей и привального бруса 69 при поднятых консолях. Это позволяет использовать существующие порты как узлы транспортной сети экранопланов. Швартовка и обработка грузов и пассажиров существенно упрощается, и, главное, повышается безопасность выполнения этих операций. При этом верхняя поверхность 70 ДПМУ 16 используется как удобная палуба.
На Фиг.28 (а-с) показаны три проекции экраноплана по Фиг.27.
На Фиг.28 (d) вид снизу. Показана примерная линия 68 границы динамической ВП. Положения механизации для крейсерского режима и для СтВП показаны на Фиг.29 и Фиг.30.
На Фиг.31, Фиг.32 и Фиг.33 (а-с) показана конструкция свободнолетающей модели, в которой реализованы некоторые принципиальные предложения по настоящей группе изобретений.
Степень раскрытия способов и вариантов устройства экранопланов для их осуществления достаточна для применения группы изобретений в промышленности с получением заявленных результатов.
Источники информации
1. Белавин Н.И. «Экранопланы». Л.: Судостроение, 1968.
2. А.И.Маскалик и др. «Экранопланы - транспортные суда XXI века», СПб.: Судостроение, 2005.
3. Патент RU 2076816.
4. Патент US 3190582.
5. Патент RU 2185979.
5. Патент US 3244246.
6. Патент US 3908783.
7. Патент US 5335742.
8. К.Г.Удалов и др. «Самолет ВВА-14», М., 1994.
9. Журнал «Техника молодежи» №8, 2005, Россия, стр.29-32.
10. Патент RU 2099217.
11. «Экранопланы Украины», Журнал «Авиация общего назначения» №5,2000, Украина.
12. Патент RU 2224671.
13. Kornev, «COMPLEX NUMERICAL MODELING OF DYNAMICS AND CRASHES OF WING-IN-GROUND VEHICLES»,41st Aerospace Sciences Meeting and Exhibit, 6-9 January 2003, Reno, Nevada.
14. Патент RU 2018465.
15. Патент RU 209722.
16. Патент RU 2224671.
17. Патент RU 2102287.
18. Патент RU 2174080.
19. Патент RU 2053903.
20. Патент RU 21272202.
21. Авторское свидетельство SU 1511170.
22. Патент RU 2139212.
23. Патент RU 2185979.
24. Патент RU 2254250.
25. Патент US 6158540.
26. И.В.Остославский, В.Р.Матвеев. «Труды ЦАГИ им. проф. Н.Е.Жуковского». Выпуск 248, М., 1935г.
27. Патент US 6848650.
28. Патент SU 1786768.
29. Патент RU 2254250 C2, B60V 1/08.
Перечень позиций и обозначений к фигурам изобретения
1 - передняя плоскость малого удлинения (ПМУ);
2 - носовой щиток;
3 - полукольцевой участок верхней поверхности ПМУ;
4 - флапероны передней ПМУ;
5 - задняя и последующие плоскости малого удлинения (ПМУ);
6 - винтокольцевой движитель (ВКД);
7 - двигатель;
8 - флапероны задней (последующих) ПМУ;
9 - торцы ПМУ;
10 - концевые аэродинамические шайбы-поплавки (АШП);
11 - полость статической воздушной подушки (СтВП);
12 - полость динамической воздушной подушки (ДВП);
13 - полость статодинамической воздушной подушки (СДВП);
14 - внутренняя поверхность концевой аэродинамической шайбы-поплавка;
15 - верхние кромки концевых аэродинамических шайб;
16 - дополнительные плоскости малого удлинения (ДПМУ);
17 - носовой руль высоты (элевон);
18 - хвостовой руль высоты (элевон);
19 - консоли;
20 - предкрылки;
21 - элероны;
22 - элевоны консолей;
23 - интерцептор;
24 - рулевая плоскость центроплана;
25 - центроплан (ЦП);
26 - двухкилевое (четырехкилевое) вертикальное оперение;
27 - рули поворота;
28 - плоскости управления вектором тяги;
29 - кольцо ВКД;
30 - верхняя поверхность передней ПМУ;
31 - передняя кромка задней (последующих) ПМУ;
32 - передняя кромка флаперонов передней ПМУ;
33 - нижняя поверхность задней ПМУ;
34 - воздушный канал;
35 - реактивная струя воздуха нижней половины винтокольцевого движителя (ВКД);
36 - механическая проводка;
37 - установочный угол между плоскостью флаперонов ПМУ и плоскостью ДУА;
38 - передняя подъемная сила;
39 - задняя подъемная сила;
40 - фокус по высоте;
41 - центр масс (ЦМ);
42 - точка середины расстояния между фокусами;
43 - фокус по углу атаки;
44 - реактивная струя верхней половины ВКД;
45 - поток воздуха, всасываемый ВКД;
46 - нижняя поверхность передней ПМУ;
47 - кабина;
48 - входная дверь (люк);
49 - остекление кабины экипажа и пассажирского салона;
50 - поплавок - надувной баллон;
51 - пневматики низкого давления;
52 - аэродинамический обтекатель;
53 - автоматическая артиллерийская установка;
54 - аварийный (дополнительный) люк;
55 - фюзеляж;
56 - тоннель;
57 - транцевая плита;
58 - скег;
59 - гидролыжа;
60 - носовой щиток фюзеляжа;
61 - участок подъема линии киля скега;
62 - грузопассажирский люк;
63 - поворотная часть ПМУ с движителем;
64 - неподвижная часть ПМУ;
65 - нижняя поверхность фюзеляжа (днище);
66 - транцевый щиток;
67 - поплавок - жесткий глиссирующий корпус;
68 - примерная линия границы динамической ВП;
69 - привальный брус;
70 - верхняя поверхность ДПМУ - палуба;
Y - подъемная сила;
Y1 - передняя подъемная сила;
Y2 - задняя подъемная сила;
ΔY - приращение подъемной силы;
G - сила тяжести (вес);
Р - сила тяги движителя;
Pv - вертикальная составляющая силы тяги;
Рн - горизонтальная составляющая силы тяги;
М - восстанавливающий момент.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКРАНОПЛАН | 2003 |
|
RU2286268C2 |
| ЭКРАНОПЛАН | 2002 |
|
RU2254250C2 |
| ЭКРАНОПЛАН - "БЕСХВОСТКА" | 2022 |
|
RU2776632C1 |
| ЭКРАНОПЛАН | 2012 |
|
RU2550568C2 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС УСТРОЙСТВ И СПОСОБ ОБЕСПЕЧЕНИЯ ВЗЛЕТА И ПОСАДКИ ЭКРАНОПЛАНА | 2002 |
|
RU2254251C2 |
| ЭКРАНОПЛАН С ВОДОМЁТНЫМ ДВИЖИТЕЛЕМ | 2015 |
|
RU2582505C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| ЭКРАНОПЛАН ИНТЕГРАЛЬНОЙ АЭРОГИДРОДИНАМИЧЕСКОЙ КОМПОНОВКИ | 2016 |
|
RU2629463C1 |
| САМОСТАБИЛИЗИРУЮЩИЙСЯ ЭКРАНОПЛАН | 2007 |
|
RU2368522C2 |
| ЭКРАНОПЛАН И СПОСОБ ПРОДОЛЬНОГО УПРАВЛЕНИЯ ЭКРАНОПЛАНОМ | 1993 |
|
RU2097229C1 |
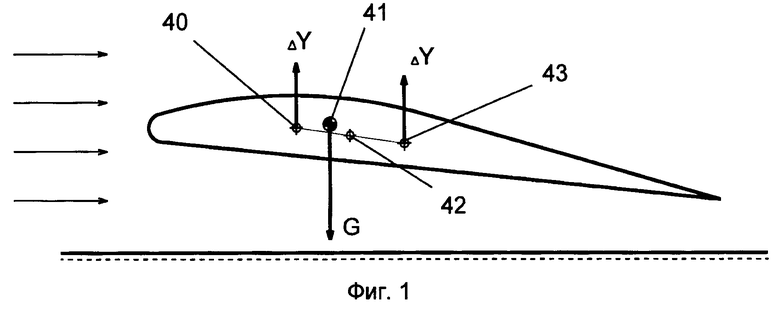
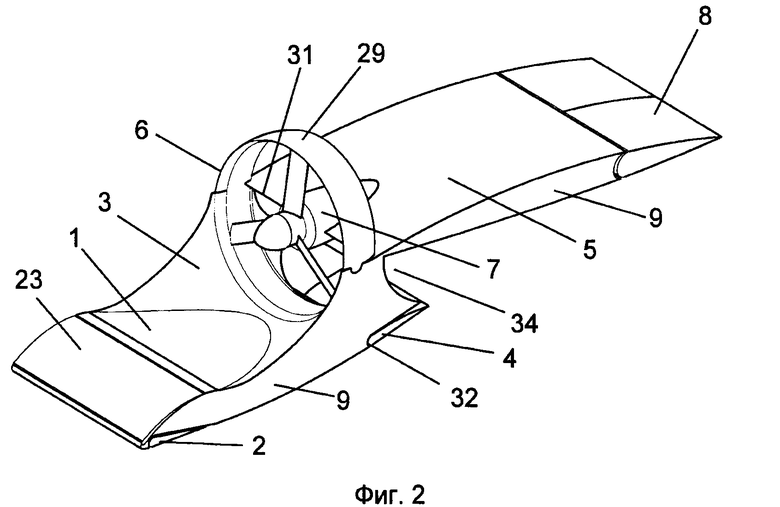

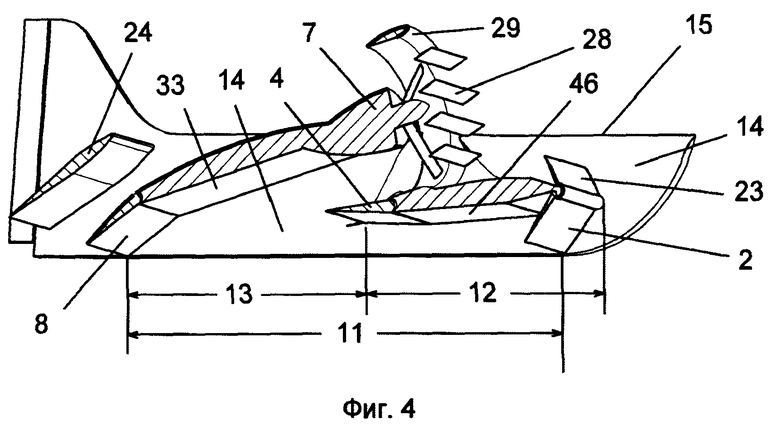
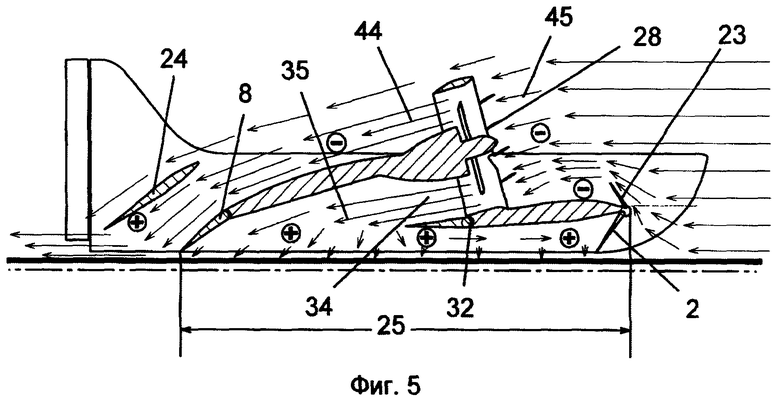
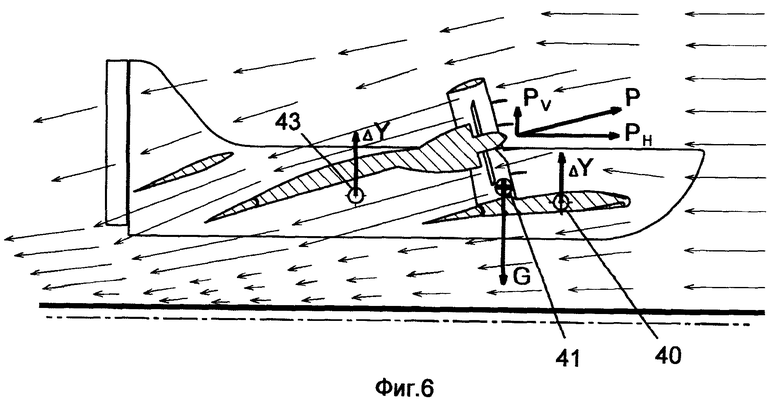

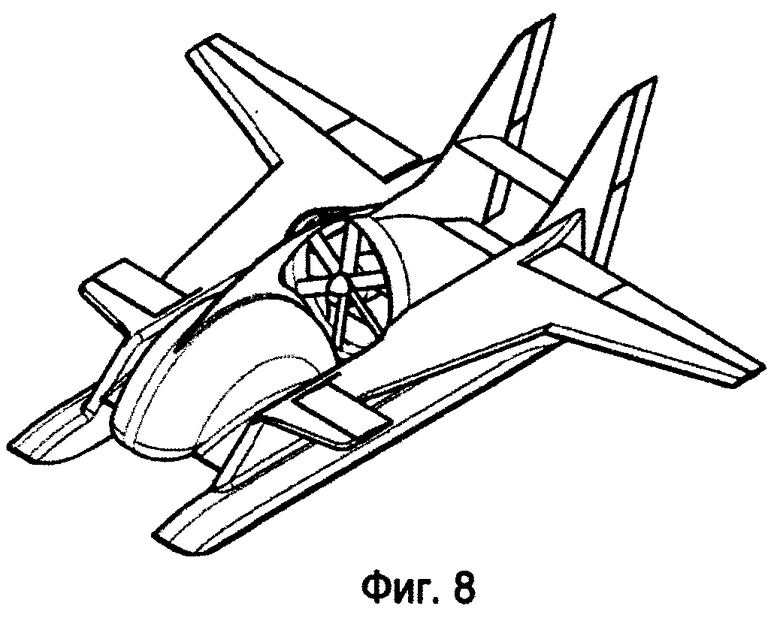
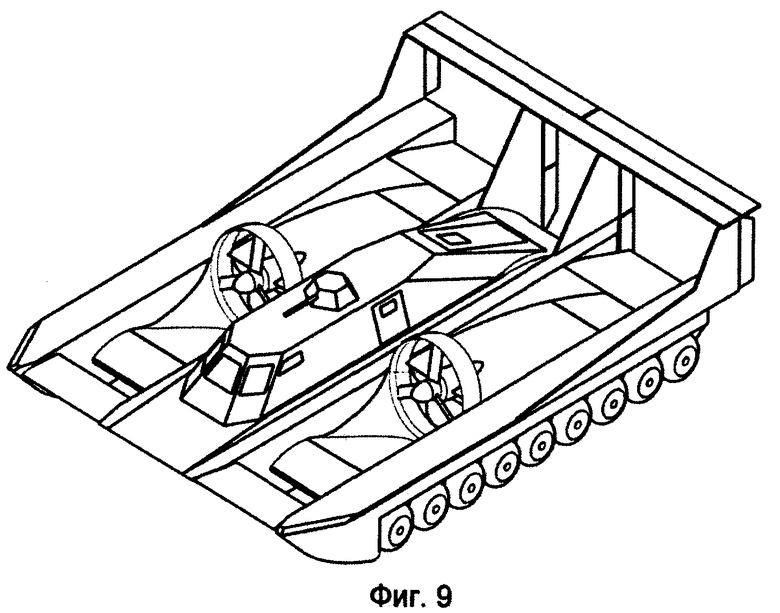
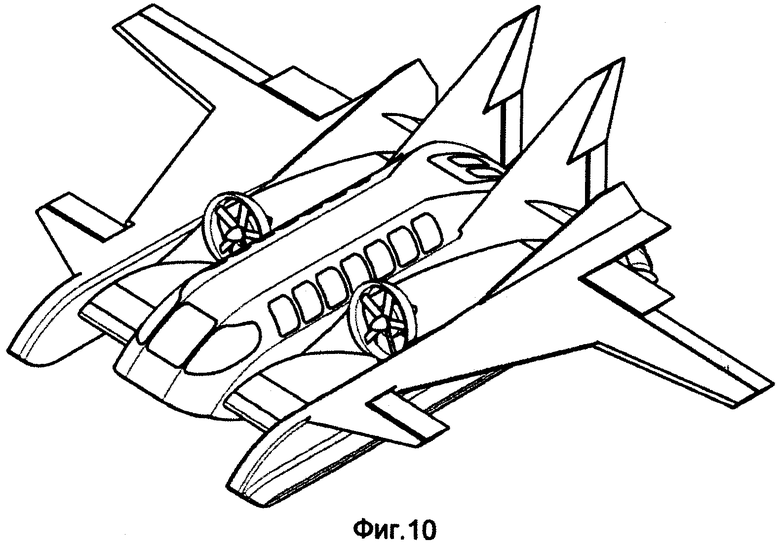
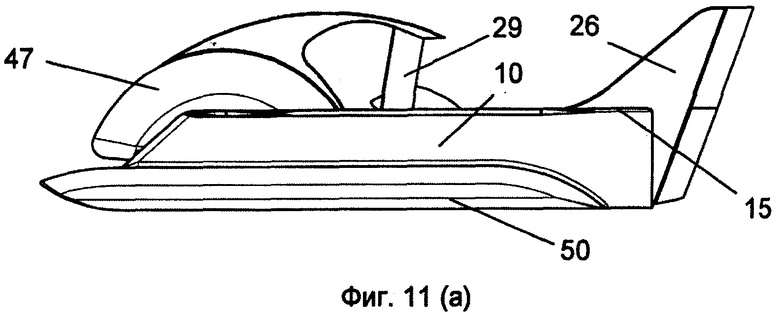
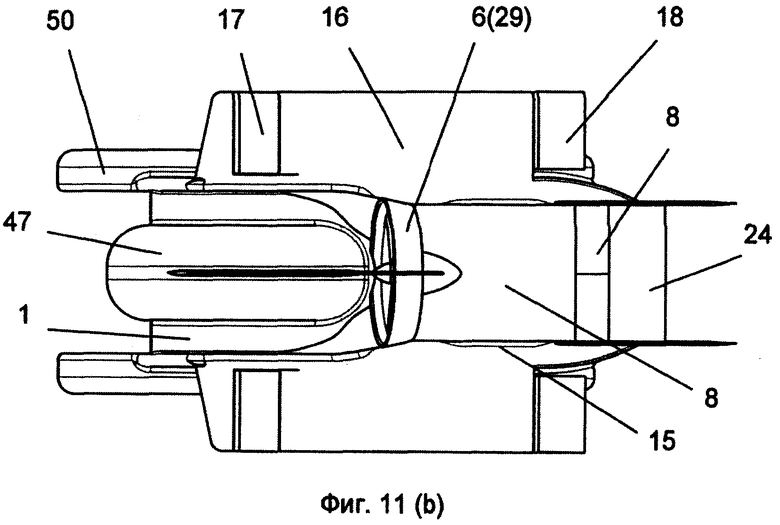
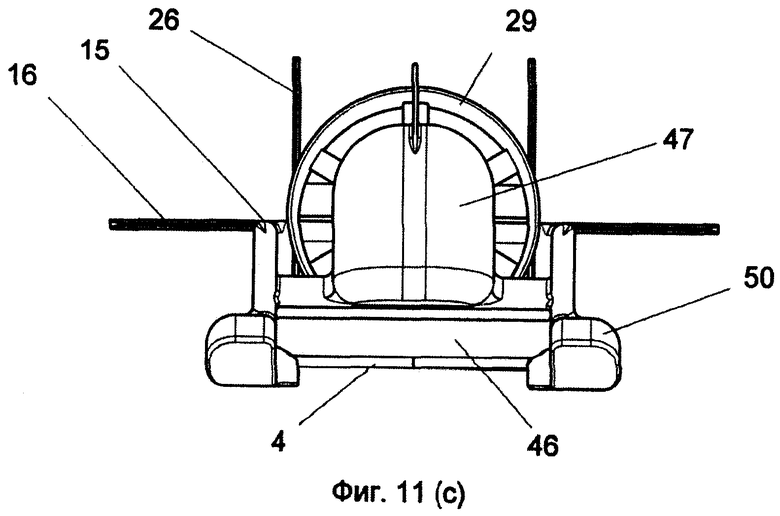
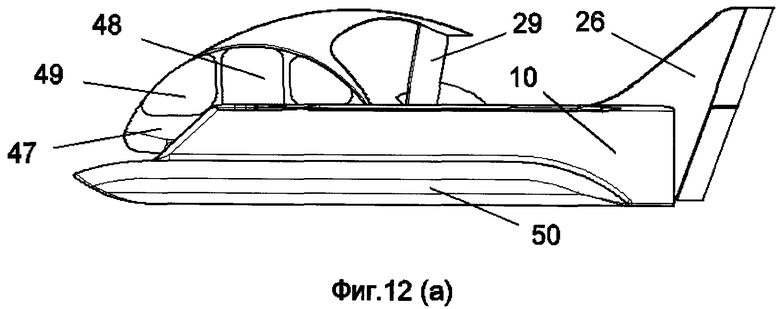
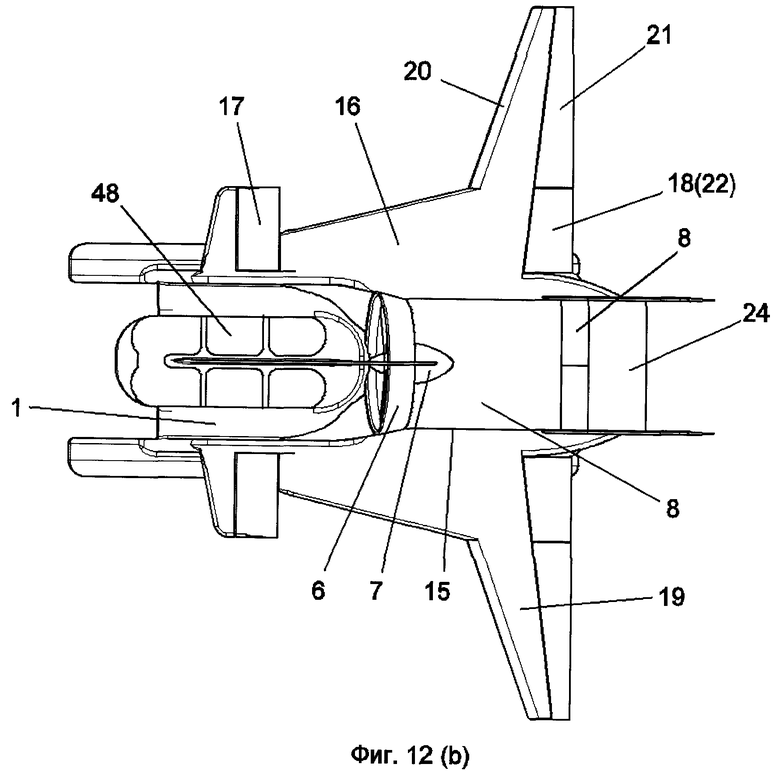
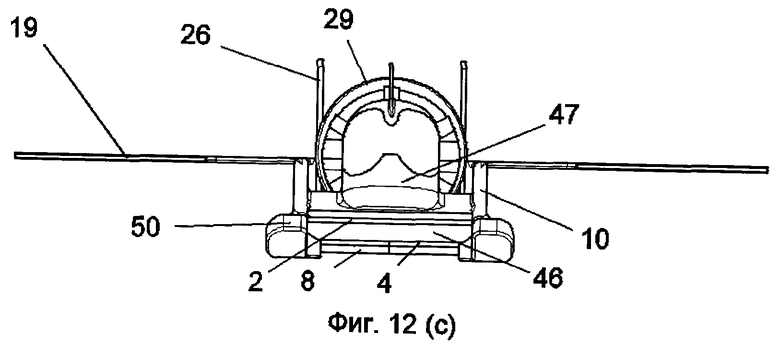

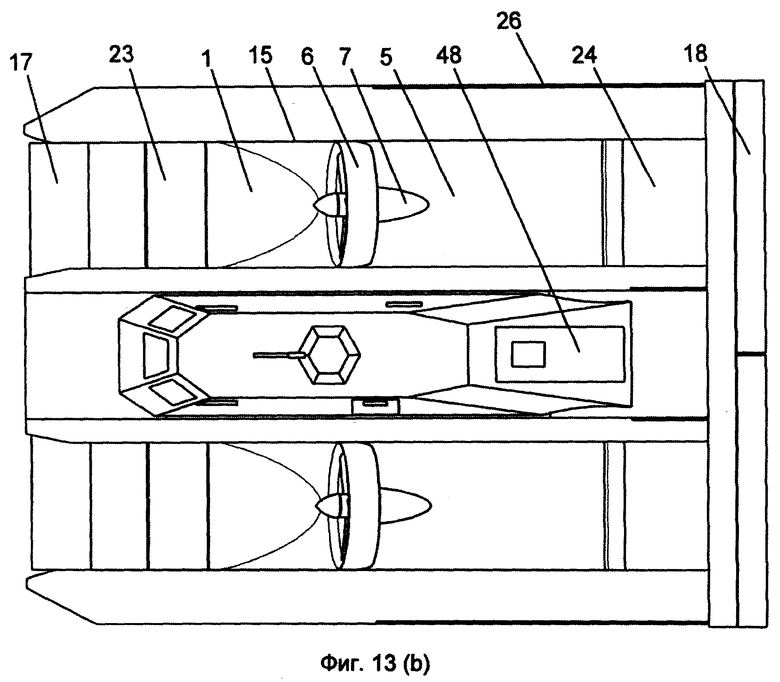


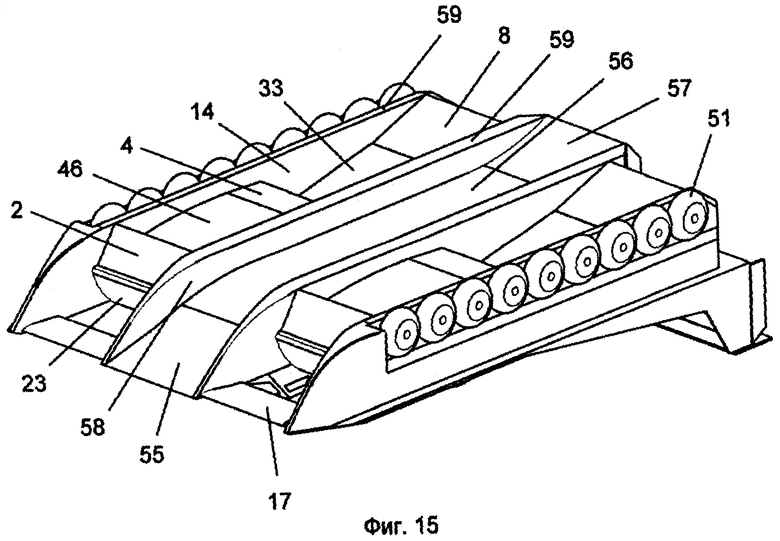
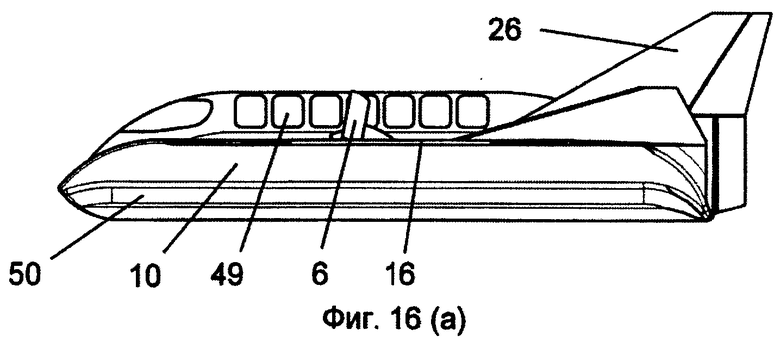
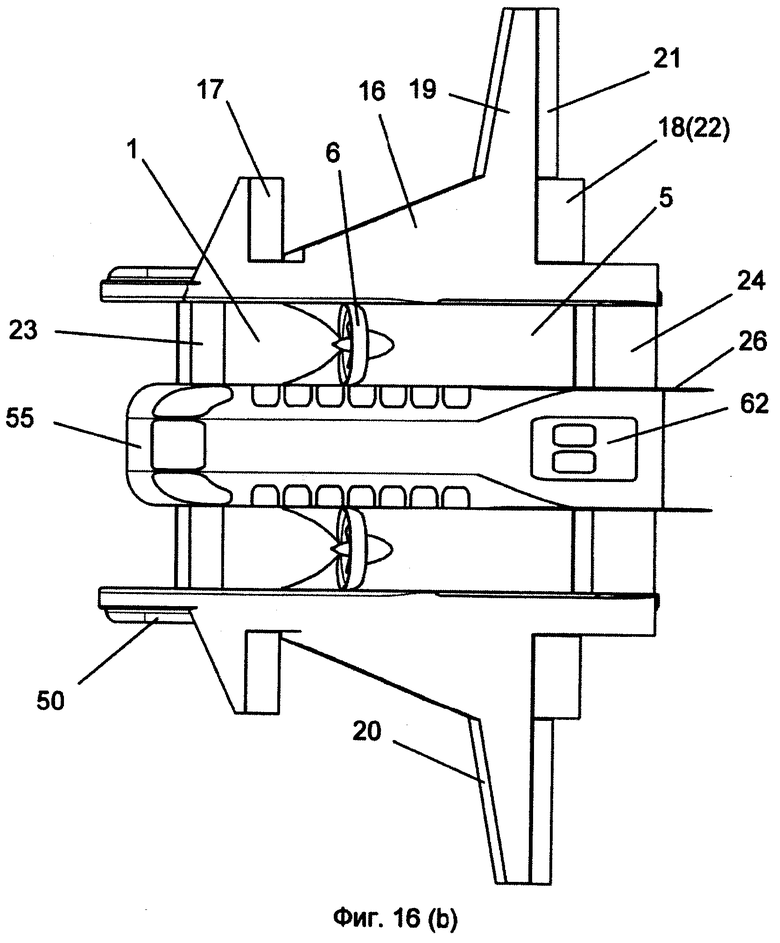
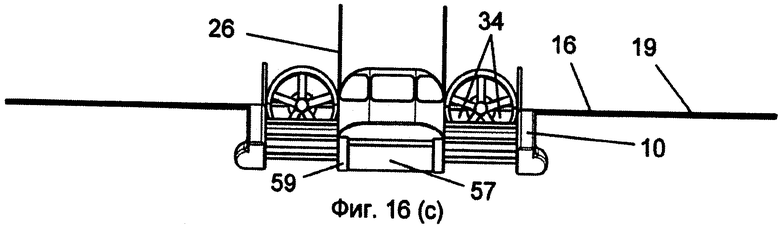
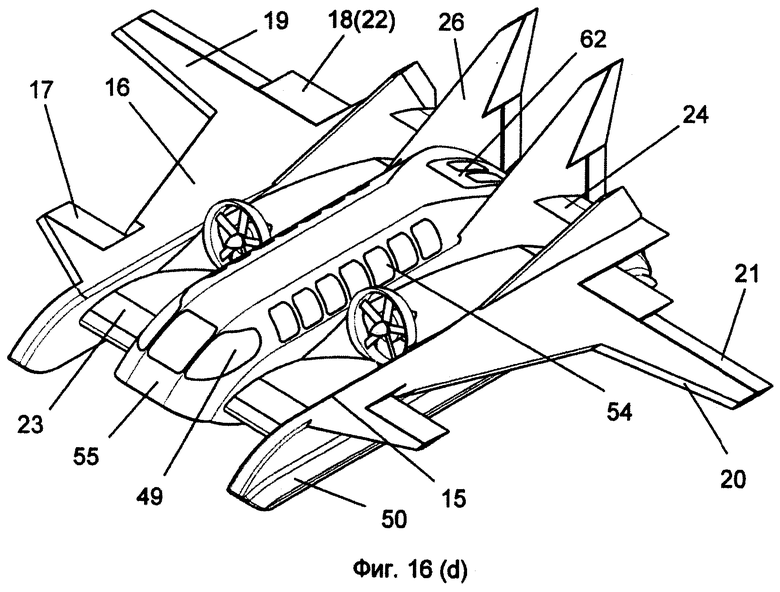
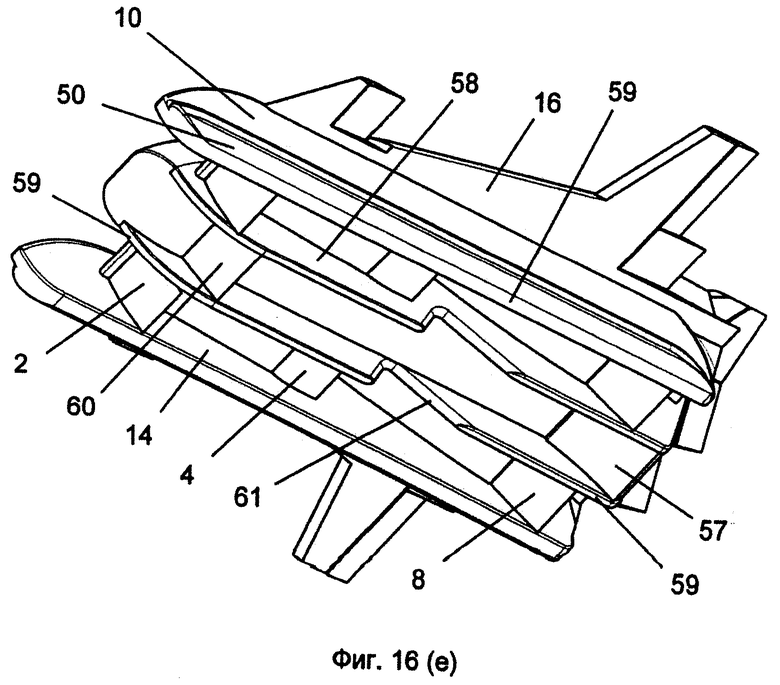
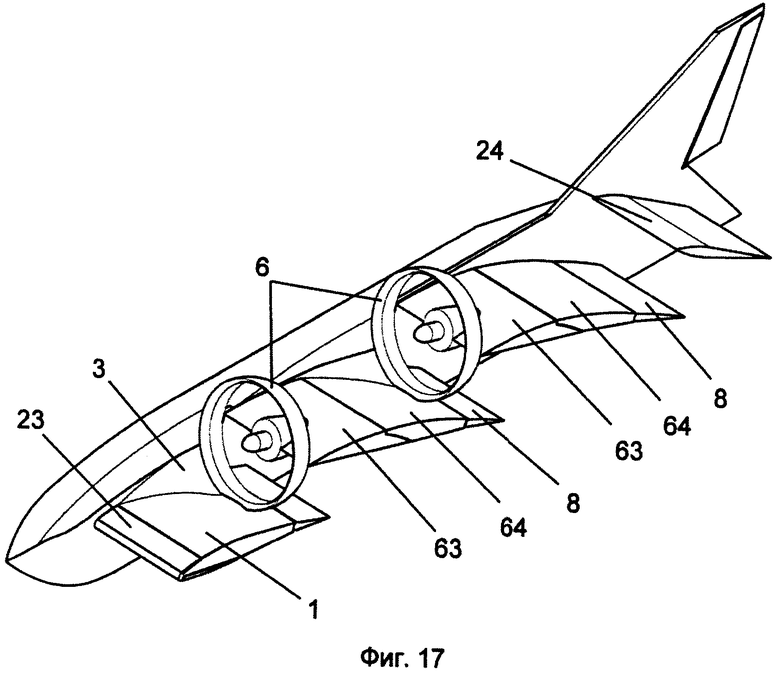

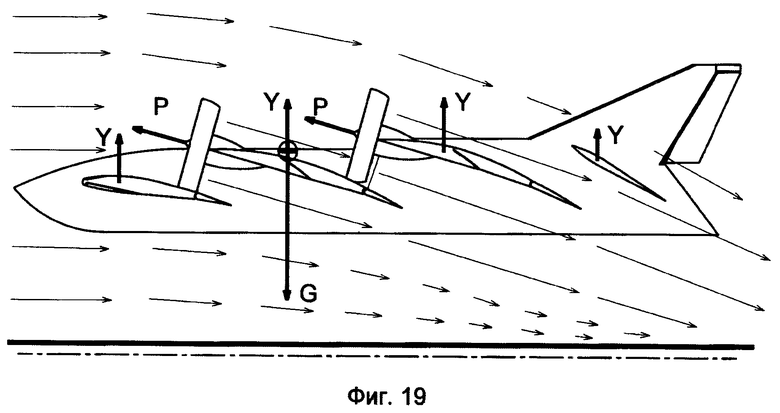
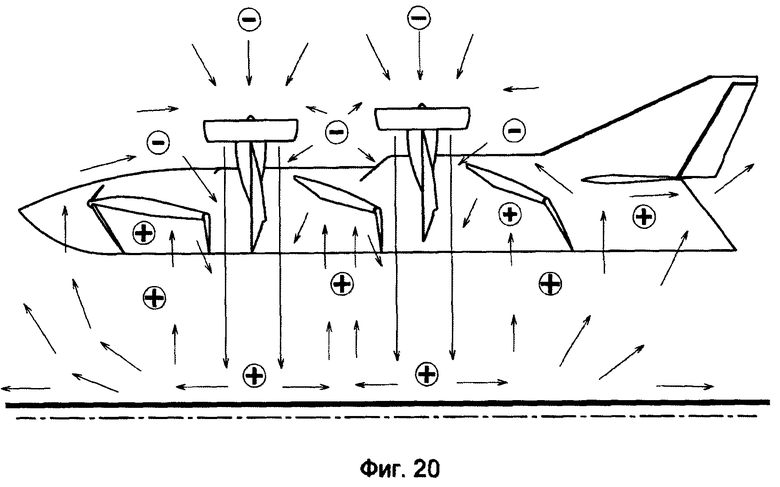
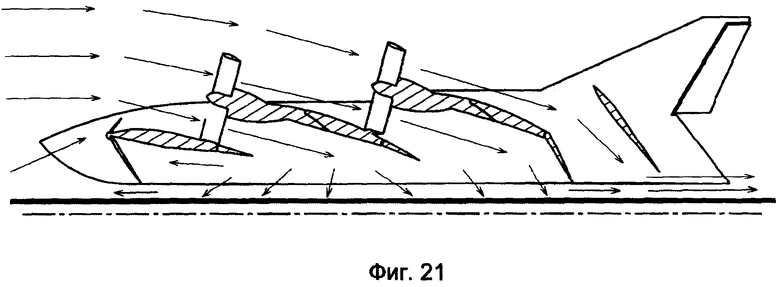

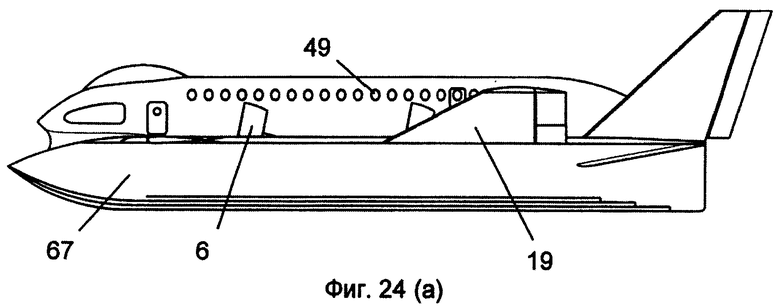
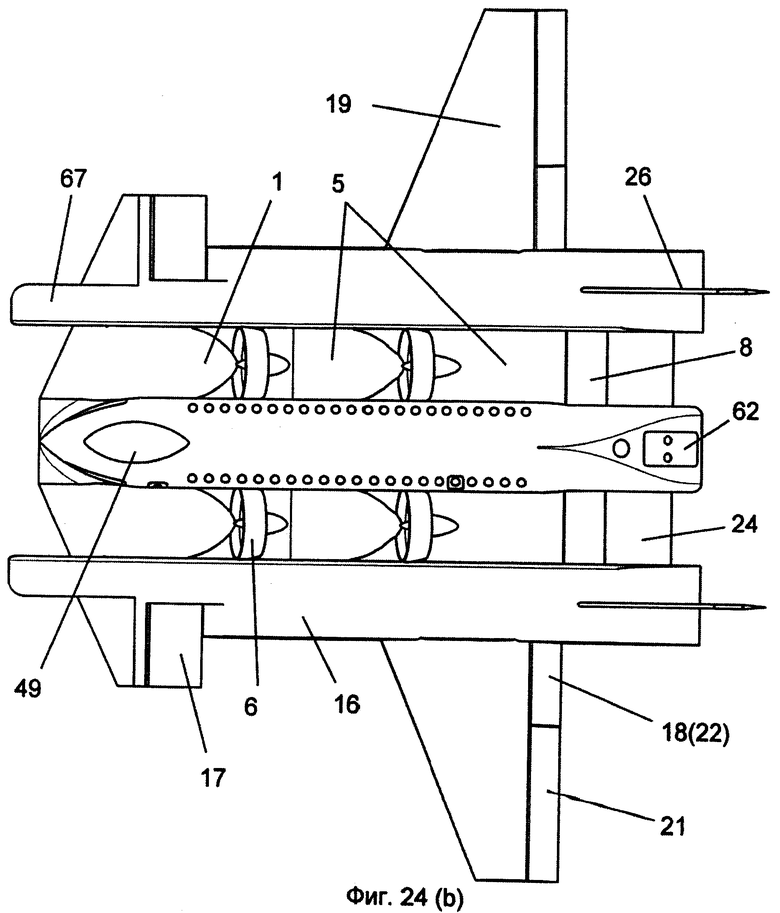
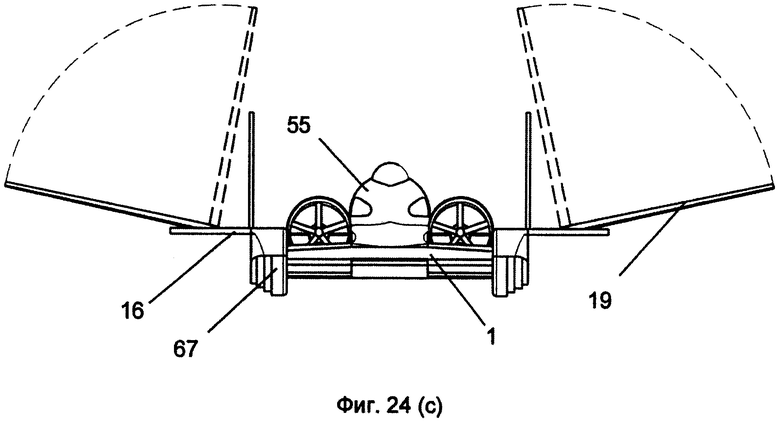
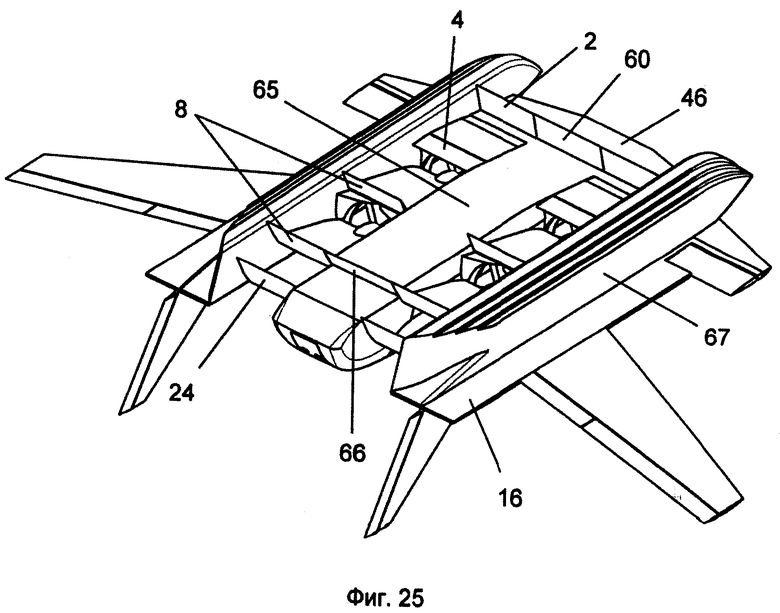
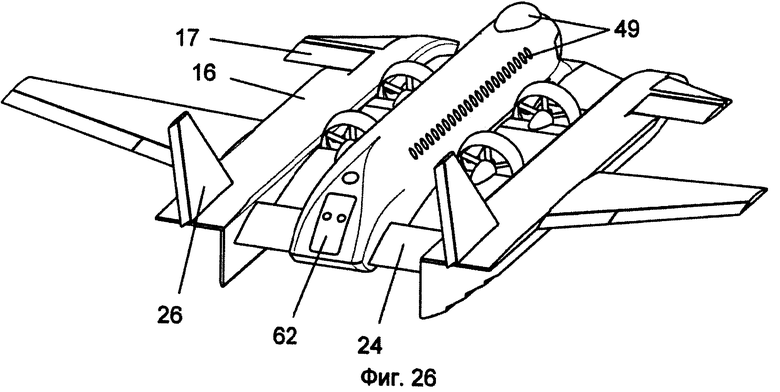
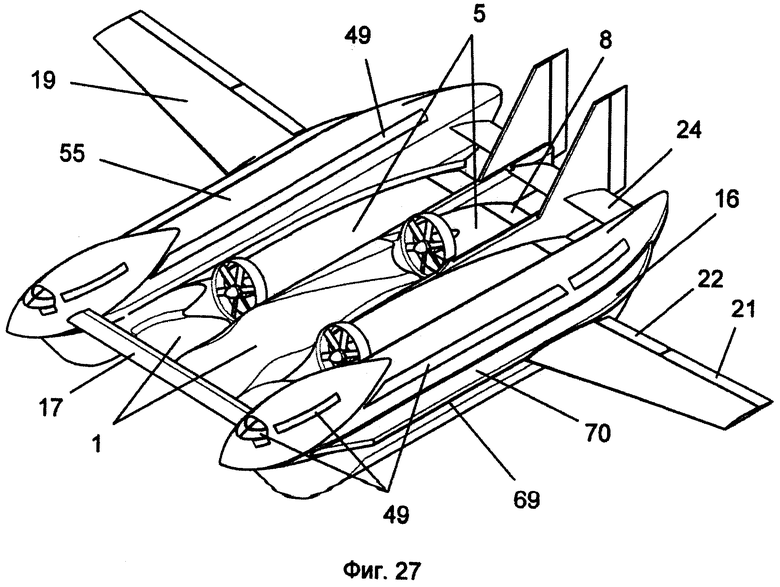
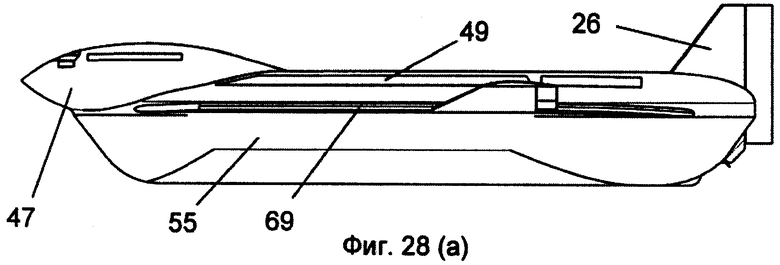
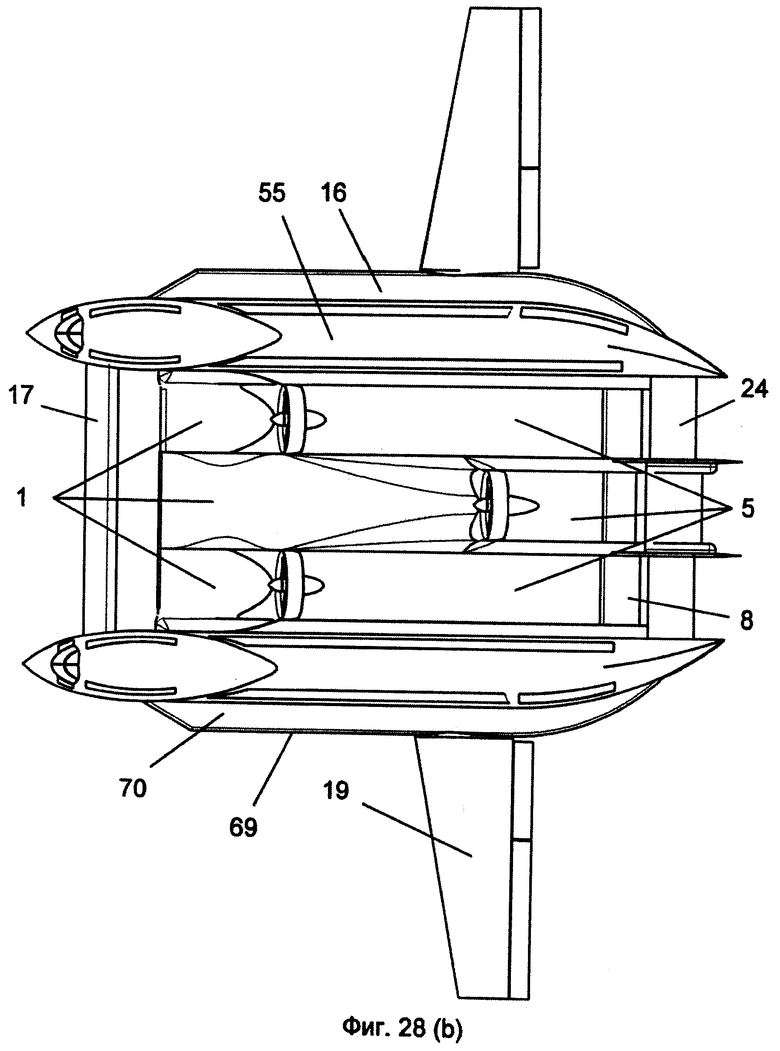
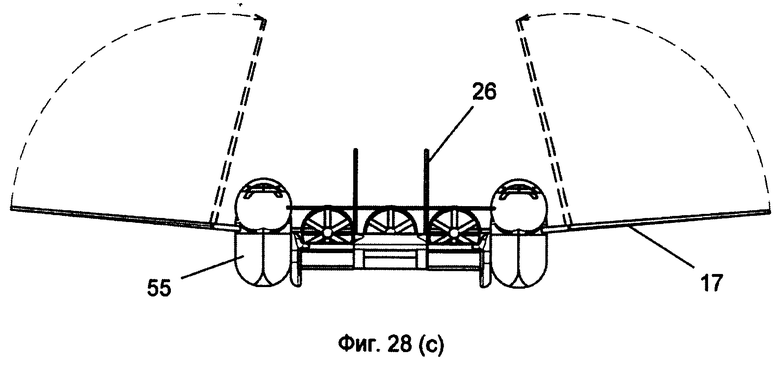

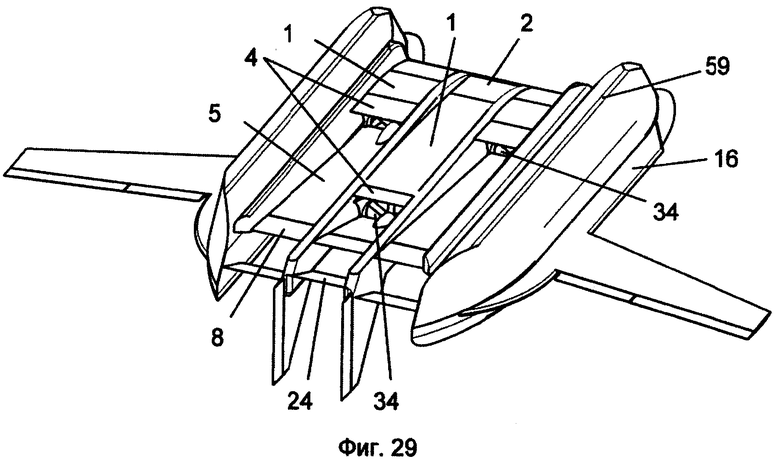
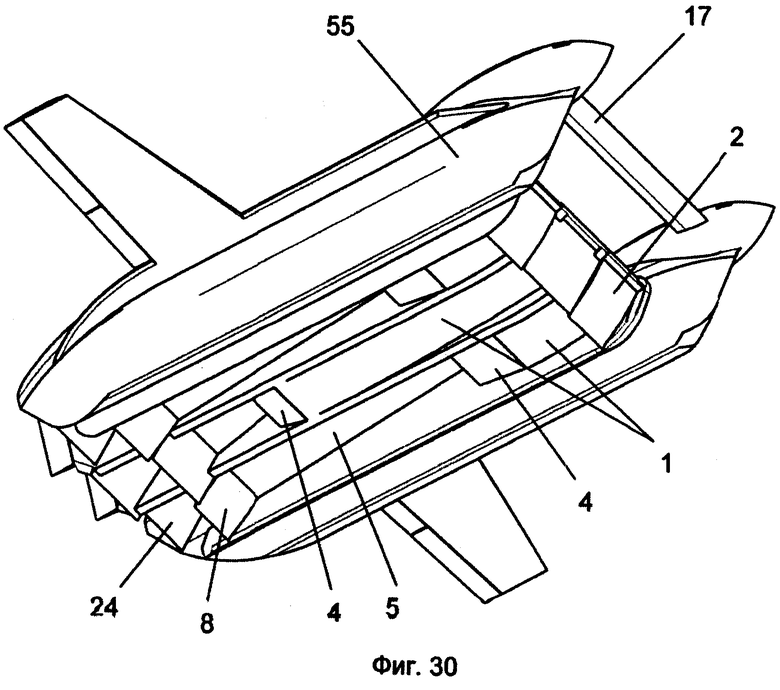



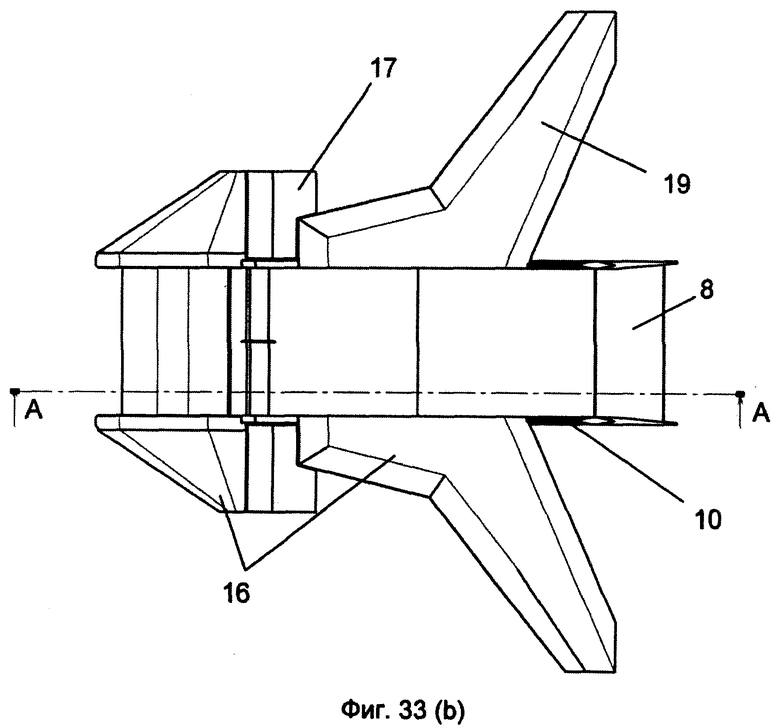

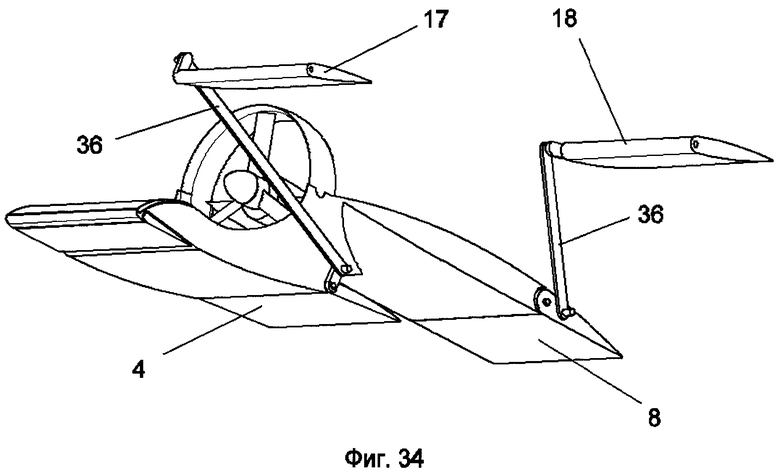
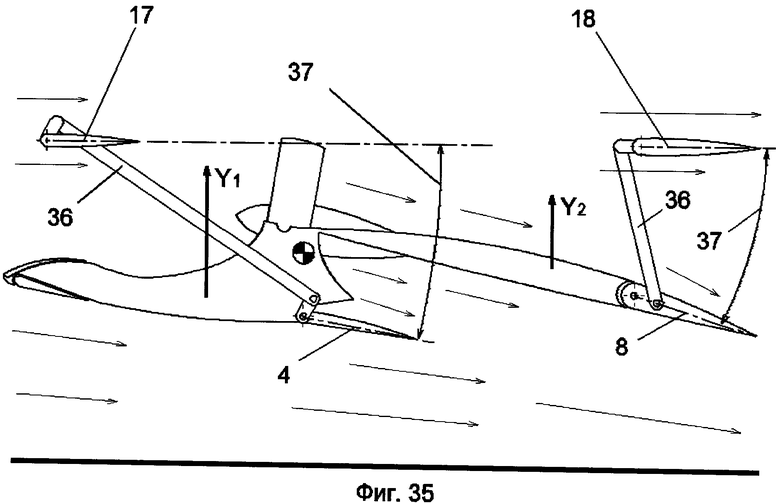

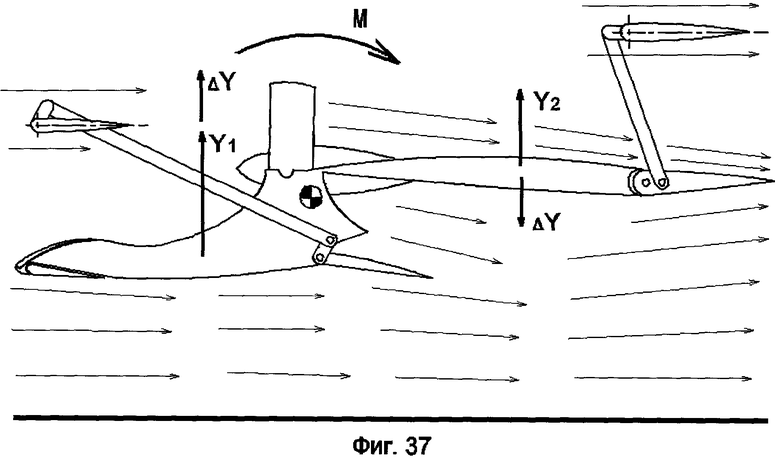
Группа изобретений относится к авиации и транспортным средствам с воздушной (статической и динамической) разгрузкой, в частности к самостабилизированным экранопланам типов А, В и С. Экраноплан (ЭП) содержит фюзеляж, движитель, несущую плоскость малого удлинения (ПМУ) с концевыми шайбами-поплавками, убираемые переднее и заднее ограждения статической воздушной подушки, средства стабилизации и управления. Несущая ПМУ выполнена в виде центроплана малого удлинения (ЦП), который составлен в продольном направлении по меньшей мере из двух ПМУ - передней ПМУ с носовым щитком и флаперонами и задней ПМУ с флаперонами. Под ЦП образованы в границах его проекции на горизонтальную плоскость - полость статической ВП (СтВП), под передней ПМУ - полость динамической ВП (ДВП), под задней ПМУ - полость статодинамической ВП (СДВП). При комплексном повышении аэродинамических и транспортных характеристик ЭП, включающих создание необходимой подъемной силы (ПС) с помощью зоны повышенного давления между несущей ПМУ и опорной поверхностью, изменяют естественный характер зависимостей величины ПС и положения фокусов несущей ПМУ от угла атаки и высоты полета путем создания в продольном направлении по меньшей мере двух локальных зон образования ПС - передней и задней, с точками их приложения на продольной оси соответственно впереди и сзади центра масс. Достигается повышение безопасности полета и выполнения маневров, увеличение несущей способности и высоты полета в режиме экранного эффекта, уменьшение размеров, улучшение взлетно-посадочных характеристик, амфибийности, расширение функциональности и диапазона эксплуатационных центровок, повышение удобства эксплуатации и технического обслуживания. 3 н. и 35 з.п. ф-лы, 37 ил. 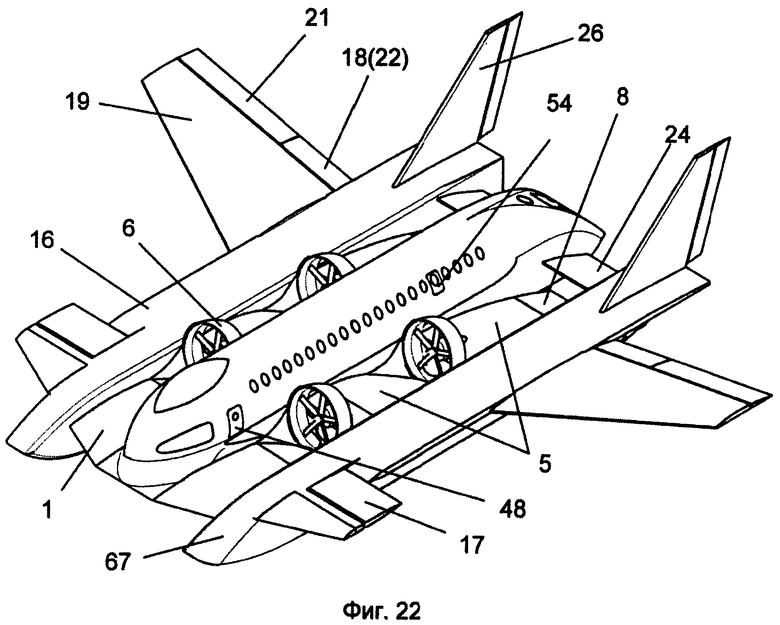
1. Способ комплексного повышения аэродинамических и транспортных характеристик экраноплана (ЭП), включающий создание необходимой подъемной силы (ПС) с помощью зоны повышенного давления между несущей плоскостью малого удлинения (ПМУ) и опорной поверхностью, а также путем сдува (отсоса) потока с верхней поверхности ПМУ, обеспечение поступательного движения с помощью маршевых движителей, управление по тангажу, крену и курсу, отличающийся тем, что изменяют естественный характер зависимостей величины подъемной силы и положения фокусов несущей плоскости малого удлинения от угла атаки и высоты полета путем создания в продольном направлении по меньшей мере двух локальных зон образования подъемных сил - передней (38) и задней (39), с точками их приложения на продольной оси соответственно впереди и сзади центра масс (41) (ЦМ), на основе по меньшей мере двух ПМУ - передней ПМУ (1) с носовым щитком (2), полукольцевым участком верхней поверхности (3) и флаперонами (4), задней ПМУ (5) с винтокольцевым движителем (ВКД) (6), двигателем (7) и флаперонами (8) и аэродинамических шайб- поплавков (АШП) (10), объединяющих торцы ПМУ (9), которым создают разные условия обтекания воздушными потоками, с образованием под ПМУ статической (СтВП) (11), динамической (ДВП) (12) и статодинамической (СДВП) (13) воздушных подушек (ВП), а над ЭП области воздушного разрежения с уменьшенной неравномерностью в продольном направлении, при взаимной компенсации моментов передней и задней подъемных сил относительно центра масс (41) и положении фокуса по высоте (40) впереди, а фокуса по углу атаки (43) сзади ЦМ (41), который размещают между фокусом по высоте и точкой (42) середины расстояния между фокусами, для чего допускают естественное взаимодействие невозмущенного набегающего потока воздуха с нижней поверхностью передней ПМУ (46), уменьшают это взаимодействие с ее верхней поверхностью (30) с помощью отсоса маршевыми движителями слоя воздуха по всему размаху и исключают такое взаимодействие с нижней (33) и верхней поверхностями задней (последующих) ПМУ путем обдува их поверхностей по всему размаху маршевыми движителями (6), управляют величинами передней и задней подъемных сил с помощью изменения углов отклонения флаперонов ПМУ и (или) изменением режима работы движителя (движителей), дополнительно стабилизируют полет и демпфируют колебания по тангажу путем автоматического изменения величины передней ПС как функции угла тангажа по типу глубокой отрицательной обратной связи, которое осуществляют с помощью динамического управления положением флаперонов передней ПМУ, на исполнительные механизмы которых подают управляющее воздействие от датчика угла атаки (ДУА), с помощью движителя (движителей) создают: поступательное движение, сдув и отсос потока с верхних поверхностей несущих плоскостей, весовую разгрузку ЭП посредством избыточного давления в статической и статодинамической воздушных подушках, дополнительную весовую разгрузку посредством вертикальной составляющей силы (сил) тяги, дополнительную управляемость и дополнительную силу (силы) тяги за счет «эффекта Бартини» и мультиплицирования скорости потока, проходящего сквозь движители.
2. Способ по п.1, отличающийся тем, что дополнительно стабилизируют полет и демпфируют колебания по тангажу путем автоматического изменения величины задней ПС (39) как функции угла тангажа по типу положительной обратной связи, которое осуществляют с помощью динамического управления положением флаперонов задней ПМУ, на исполнительные механизмы которых подают управляющее воздействие от датчика угла атаки.
3. Способ по п.1, отличающийся тем, что ЭП сообщают дополнительную подъемную силу путем создания на верхних поверхностях ПМУ локальных зон разрежения, для чего, начиная с лобовой части передней ПМУ, монтируют один или несколько управляемых интерцепторов (23).
4. Способ по п.1, отличающийся тем, что ЭП сообщают дополнительную подъемную силу путем дополнительного отсоса воздуха из пограничного слоя верхних поверхностей ПМУ с помощью эжекции пограничного слоя на внутреннюю поверхность кольца (колец) ВКД (29).
5. Способ по п.1, отличающийся тем, что ЭП сообщают дополнительную подъемную силу на всех режимах движения и уменьшают силу индуктивного сопротивления за счет уменьшения боковых перетеканий воздуха и за счет использования кинетической энергии боковых индуктивных вихрей, для чего монтируют на верхних кромках аэродинамических шайб дополнительные плоскости малого удлинения (ДПМУ) (16).
6. Способ по п.1, отличающийся тем, что улучшают продольную и поперечную управляемость ЭП путем создания управляющих моментов в носовой и хвостовой оконечностях ЭП, для чего на аэродинамических шайбах (10) монтируют носовой руль высоты (17) (или носовые элевоны) или носовой руль высоты (17) (или носовые элевоны) и хвостовой руль высоты (18) (или хвостовые элевоны).
7. Способ по п.1, отличающийся тем, что дополнительно стабилизируют полет и демпфируют колебания по тангажу посредством автоматически создаваемых моментов аэродинамических сил, точка приложения которых расположена в хвостовой части ЭП, для чего над задней кромкой (или на задней кромке) задней (последней) ПМУ, в струе ВКД, монтируют рулевую плоскость (24), а на ее исполнительные механизмы подают управляющее воздействие от датчика угла атаки, которое прямо пропорционально величине изменения угла атаки.
8. Способ по п.1, отличающийся тем, что ЭП обеспечивают многорежимность, дополнительные продольную и поперечную устойчивость и управляемость путем создания дополнительной подъемной силы и управляющих моментов, для чего монтируют на верхних кромках аэродинамических шайб плоскости большого удлинения - консоли (19), которые снабжают предкрылками (20), элеронами (21) и закрылками (или элевонами) (22), при этом размещают проекцию результирующего центра давления консолей на продольную ось сзади центра масс (41).
9. Способ по п.1, отличающийся тем, что ЭП снабжают дополнительными функциями - вертикальными взлетом-посадкой и режимом висения посредством отклонения вектора силы тяги (векторов сил тяг) ВКД вверх, а его (их) реактивной струи (струй) соответственно вниз, под ЭП, для чего поворачивают ПМУ или часть ПМУ (63) вместе с движителем (движителями) вокруг ее (их) поперечной оси (осей), флапероны ПМУ отклоняют вниз, а интерцепторы (23) вверх.
10. Экраноплан, содержащий фюзеляж, по меньшей мере один движитель, несущую плоскость малого удлинения (ПМУ) с концевыми шайбами-поплавками (АШП), убираемые переднее и заднее ограждения статической воздушной подушки, средства стабилизации и управления, отличающийся тем, что несущая плоскость малого удлинения выполнена в виде центроплана малого удлинения (ЦП, 25), который составлен в продольном направлении по меньшей мере из двух ПМУ - передней ПМУ (1) с носовым щитком (2) и флаперонами (4) и задней ПМУ (5) с флаперонами (8), торцы ПМУ (9) объединены концевыми аэродинамическими шайбами-поплавками (10), на носовой и хвостовой оконечностях которых смонтированы носовой руль высоты (17) (или носовые элевоны) или носовой руль высоты (17) (или носовые элевоны) и хвостовой руль высоты (18) (или хвостовые элевоны), верхние кромки аэродинамических шайб (15) расположены выше верхних поверхностей ПМУ с образованием над ПМУ продольного канала повышенного воздушного разрежения, при этом образованы: под ЦП в границах его проекции на горизонтальную плоскость - полость статической ВП (СтВП, 11), под передней ПМУ - полость динамической ВП (ДВП, 12), под задней (и последующими) ПМУ полость (полости) статодинамической (статодинамических) ВП (СДВП, 13), ограждения которых сформированы внутренними поверхностями поплавков (14), боковыми и (или) нижней поверхностями фюзеляжа (65) и флаперонами ПМУ, причем система управления флаперонами передней ПМУ выполнена с возможностью параллельного управления отклонением как от собственного командного рычага, так и от датчика угла атаки (ДУА) по каналу автоматической продольной стабилизации и демпфирования, который выполнен с подсистемой регулировки угла (37) между плоскостью флаперонов и плоскостью ДУА, ПМУ центроплана смонтированы с положительными установочными углами атаки и с перекрытием в горизонтальной плоскости, при этом передняя кромка (31) задней плоскости (последующих плоскостей) расположена (расположены) над передними кромками (32) флаперонов передней плоскости (плоскостей), образуя воздушный канал (каналы) (34), через который (которые) в полости воздушных подушек направлена реактивная струя (струи) (35) нижней половины винтокольцевого (ВКД) движителя (движителей), кольцо которого (которых) (29) смонтировано на передней кромке (31) (кромках) задней (последующих) ПМУ (5), а двигатель (7) (двигатели) смонтирован (смонтированы) следом за ВКД во внутреннем объеме (объемах) ПМУ (5), причем размах ПМУ (5) выполнен равным, меньше или больше внутреннего диаметра кольца (29) ВКД, а размах передней ПМУ (1) может превышать внешний диаметр кольца, внутренняя и внешняя поверхности кольца (колец) плавно сопряжены с внутренними боковыми и верхними поверхностями АШП, боковыми и верхней поверхностями фюзеляжа и верхними поверхностями передней (предыдущих) ПМУ с образованием на ней (на них) полукольцевого участка (3) поверхности, который разворачивается в верхнюю поверхность (30) ПМУ с прямолинейной образующей, при этом образована единая базовая конструктивная группа, содержащая переднюю ПМУ, ВКД, двигатель и заднюю ПМУ.
11. Экраноплан по п.10, отличающийся тем, что на верхних кромках аэродинамических шайб (15) смонтированы дополнительные плоскости малого удлинения (ДПМУ) (16).
12. Экраноплан по п.10, отличающийся тем, что на верхних кромках аэродинамических шайб (15) смонтированы плоскости большого удлинения - консоли (19), которые снабжены предкрылками (20), элеронами (21) и закрылками (или элевонами) (22), при этом проекция результирующего центра давления консолей на продольную ось ЭП расположена сзади центра масс (41).
13. Экраноплан по п.10, отличающийся тем, что хорда передней ПМУ составляет 0,2-0,65 эквивалентной хорды центроплана - расстояния от передней кромки передней ПМУ (1) до задней кромки задней ПМУ (5).
14. Экраноплан по п.10, отличающийся тем, что центроплан имеет рулевую плоскость (24), смонтированную над ее задней кромкой (или на ее задней кромке) в струе ВКД.
15. Экраноплан по п.10, отличающийся тем, что флапероны передней ПМУ (1) выполнены щелевыми, а ось поворота флаперонов расположена в пределах 5-30% их хорды.
16. Экраноплан по п.10, отличающийся тем, что флапероны передней ПМУ (1) выполнены с размахом на 5-30% меньше размаха передней ПМУ (1).
17. Экраноплан по п.10, отличающийся тем, что передние кромки второй и последующих ПМУ (5) расположены или в плоскости, параллельной основной плоскости ЛА, или ступенчато - следующая выше предыдущей, а их геометрические параметры и установочные углы могут быть или одинаковыми, или разными.
18. Экраноплан по п.10, отличающийся тем, что задние кромки флаперонов (4) и (8) в нейтральном положении, соответствующем расчетному режиму полета, могут лежать в одной или разных горизонтальных плоскостях, а их взаимное расположение определяется требованиями к летно-техническим характеристикам конкретного ЭП.
19. Экраноплан по п.10, отличающийся тем, что носовой руль высоты (17) расположен в невозмущенном потоке перед передней ПМУ и смонтирован либо консольно на внутренних стенках носовых оконечностей (14) АПШ (10) или на носовой оконечности фюзеляжа, либо по балочному типу между носовыми оконечностями АШП и фюзеляжа.
20. Экраноплан по п.10, отличающийся тем, что носовой руль высоты (17) выполняет функцию ДУА для флаперонов (4) передней ПМУ и связан с ними посредством механической (или электрической, или гидравлической, или смешанной) проводки управления, которая выполнена с возможностью дистанционного изменения установочного угла между плоскостями руля и флаперонов и с возможностью полного рассоединения.
21. Экраноплан по п.14, отличающийся тем, что носовой руль высоты (17) выполняет функцию ДУА для рулевой плоскости (24) центроплана и связан с ней посредством механической (или электрической, или гидравлической, или смешанной) проводки управления.
22. Экраноплан по п.10, отличающийся тем, что система управления флаперонами (8) задней ПМУ (5) выполнена с возможностью параллельного управления от командных рычагов и от хвостового датчика угла атаки (ДУА) по дополнительному каналу автоматической продольной стабилизации и демпфирования, с возможностью регулировки угла между плоскостями флаперонов и ДУА.
23. Экраноплан по п.22, отличающийся тем, что хвостовой руль высоты (18) выполняет функцию ДУА для флаперонов задней ПМУ (8) и связан с ними посредством механической (или электрической, или гидравлической, или смешанной) проводки управления, с возможностью регулировки угла между плоскостями руля и флаперонов или их полного рассоединения.
24. Экраноплан по п.10, отличающийся тем, что он составлен из двух базовых конструктивных групп, двух АШП и фюзеляжа (55), который выполнен с продольными сечениями в форме аэродинамических крыльевых профилей, с остеклением пассажирского салона (49), входной дверью (48), аварийным(и) люками (54) и двухкилевым вертикальным оперением (26), между килями которого выполнен грузопассажирский люк (62).
25. Экраноплан по п.10, отличающийся тем, что ЦП расположен между двумя фюзеляжами и составлен в поперечном направлении по меньшей мере из трех базовых конструктивных групп с по меньшей мере тремя движителями, смонтированными на передних кромках задних ПМУ каждой группы, причем хорда передней ПМУ средней группы больше или меньше хорд передних ПМУ боковых групп.
26. Экраноплан по п.10, отличающийся тем, что ЦП составлен из двух или более базовых конструктивных групп как в продольном, так и в поперечном направлении, при этом задняя ПМУ каждой предыдущей группы является передней ПМУ следующей группы.
27. Экраноплан по п.10, отличающийся тем, что нижняя часть фюзеляжа выполнена либо как жесткий (или надувной) корпус с глиссирующими обводами, либо с обводами скегового типа, а их форштевни могут располагаться как впереди, так и сзади передней ПМУ, причем киль лодки или кили скегов выполняют функции опорных поверхностей при стоянке на грунте и лежат в одной плоскости с опорными поверхностями АШП, причем все опорные поверхности выполнены демпфированными, из износостойкого материала с малым коэффициентом трения в виде гидролыж (59), а линии килей скегов имеют участки подъема (61) в пределах длин статодинамических воздушных подушек второй и последующих ПМУ, при этом носовая часть тоннеля снабжена носовым щитком.
28. Экраноплан по п.10, отличающийся тем, что днище фюзеляжа выполнено как продолжение нижней поверхности передней ПМУ в виде плоской несущей поверхности с носовым (60) и транцевым (66) щитками, транцевый щиток (66) вместе с флаперонами задних ПМУ (8) образуют заднее ограждение СтВП, а в полете убирается заподлицо с днищем.
29. Экраноплан по п.10, отличающийся тем, что поплавки АШП выполнены или в виде жестких глиссирующих корпусов (67), или в виде мягких надувных баллонов (50).
30. Экраноплан по п.10, отличающийся тем, что поплавки АШП выполнены в виде многоосного колесного шасси, образованного расположенными последовательно друг за другом облегченными пневматиками низкого давления (51), причем верхняя часть пневматиков каждого борта с внешней стороны может быть прикрыта общим аэродинамическим обтекателем (52).
31. Экраноплан по п.10, отличающийся тем, что установочный угол передней ПМУ (1) равен среднему наивыгоднейшему углу атаки для диапазона крейсерских высот полета в режиме экранного эффекта, а дополнительные ПМУ (16) и консоли (19) имеют положительные установочные углы атаки.
32. Экраноплан по п.10, отличающийся тем, что ПМУ снабжены одним или несколькими интерцепторами (23), шарнирно установленными начиная с верхней лобовой части передней ПМУ.
33. Экраноплан по п.10, отличающийся тем, что на верхних поверхностях ПМУ выполнены входные каналы (отверстия или щели) системы отсоса пограничного слоя, которые посредством трубопроводов соединены с отверстиями, выполненными на внутренней поверхности (поверхностях) кольца (колец) (29) ВКД.
34. Экраноплан по п.10, отличающийся тем, что система управления механизацией центроплана по продольному каналу выполнена с возможностью выполнять в полете одновременное увеличение или уменьшение углов отклонения флаперонов ПМУ с раздельной или связанной регулировкой углов их отклонения для выполнения продольной балансировки.
35. Экраноплан по п.34, отличающийся тем, что в крейсерском режиме, при превышении определенной скорости отклонения элевонов ПМУ вниз автоматически, пропорционально углу отклонения, увеличивается режим работы двигателей.
36. Экраноплан по п.10, отличающийся тем, что перед каждым ВКД, в границах их диска, горизонтально установлены плоскости управления вектором тяги (28), имеющие крыльевой профиль и поворотно смонтированные в виде решетки так, что их задние кромки лежат в плоскости, параллельной плоскости передней кромки кольца (29).
37. Экраноплан по п.26, отличающийся тем, что ПМУ центроплана или части ПМУ (63), на которых смонтированы ВКД, выполнены поворотными вокруг их поперечных осей до вертикального положения векторов тяги.
38. Способ выполнения полета при пилотировании экраноплана по любому из пп.10-37 в соответствующих случаях, включающий изменение подъемной силы, сил элементов управления в каналах тангажа, крена и курса и сил тяги движителя (движителей), отличающийся тем, что с целью повышения безопасности полета на высотах, выделенных для полетов экранопланов, все этапы полета и маневры выполняют с постоянным, равным нулю, углом тангажа, соответствующим горизонтальному положению фюзеляжа, которое обеспечивают продольной балансировкой ЭП путем изменения величины задней ПС (или синхронным обратно-пропорциональным изменением величин передней ПС и задней ПС) с помощью соответствующего изменения углов отклонения флаперонов ПМУ и (или) изменением режимов работы двигателей, при этом сначала на заданной высоте полета выполняют продольную балансировку отклонением флаперонов задней ПМУ или рулевой плоскости (24) на необходимый угол, затем фиксируют в системе автостабилизации и демпфирования «ДУА - флапероны задней ПМУ» образовавшийся угол между плоскостью ДУА и флаперонов, задают высоту полета путем отклонения флаперонов ПМУ на соответствующий угол и выбором режима работы двигателей, а для стабилизации этой высоты фиксируют в канале продольной автостабилизации и демпфирования «ДУА - флапероны передней ПМУ» образовавшийся при этом угол между плоскостью ДУА и плоскостью флаперонов, выполняют микровертикальный взлет и поступательное движение на СтВП при положении механизации ПМУ, соответствующем движению на СтВП и взлетной мощности двигателей, по мере разгона ЭП до крейсерской скорости плавно убирают механизацию ПМУ в положение для набора высоты или горизонтального полета, из горизонтального полета выполняют набор высоты или снижение путем одновременного увеличения или уменьшения величины передней и задней ПС, для чего одновременно увеличивают или уменьшают угол отклонения флаперонов ПМУ и элевонов консолей и (или) увеличивают (уменьшают) режим работы двигателей, при полете в режиме экранного эффекта выполняют координированные развороты (без скольжения) с необходимым креном и сохранением высоты, выполняют посадку из полета в режиме экранного эффекта путем плавного уменьшения мощности двигателей и снижения ЭП до минимально возможной (по внешним условиям) высоты полета, пропорционально уменьшению скорости отклоняют носовой щиток, флапероны ПМУ, средства аэродинамического торможения и реверса, с переводом ЭП в режим движения на СтВП, выполняют руление на СтВП или приземление (приводнение) с минимальной или нулевой поступательной скоростью, выполняют посадку с любых высот полета с использованием крутой траектории снижения вплоть до парашютирования при горизонтальном положении фюзеляжа, для чего на текущей высоте полета или на снижении устанавливают минимальный режим работы двигателей, обеспечивающий управляемость и отклоняют механизацию ПМУ в положение, соответствующее движению на СтВП, корректируют пространственное положение ЭП и траекторию снижения (вертикальную и поступательную скорости), с помощью органов управления, отклонения флаперонов ПМУ и режима работы двигателей, выполняют вертикальный взлет или режим висения путем одновременного перевода направления векторов результирующих сил тяги движителей в вертикальное положение, для этого вращают вокруг поперечных осей ПМУ (или часть ПМУ), на которых смонтированы движители, до вертикального положения сил тяги и выводят двигатели на взлетную мощность, выполняют пространственное перемещение и стабилизацию ЭП с помощью флаперонов ПМУ, рулей, изменения направления векторов сил тяги движителей и их величины, на безопасных высотах выполняют полет «по-самолетному», т.е. с изменением угла атаки рулями высоты, при этом флапероны ПМУ устанавливают в положение, соответствующее максимальному аэродинамическому качеству.
| ЭКРАНОПЛАН И ЕГО ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС | 2005 |
|
RU2337022C2 |
| DE 3843231 A1, 28.06.1990 | |||
| US 3244246 A, 05.04.1966 | |||
| ЭКРАНОПЛАН | 2002 |
|
RU2254250C2 |
| ЭКРАНОПЛАН | 2005 |
|
RU2297933C1 |

