Изобретение относится к спасательным средствам и может быть использовано для обнаружения человека, терпящего бедствие на воде и определения его местоположения.
Известны спасательные системы и устройства (авт. свид. СССР N N 385819, 431063, 637298, 765113, 988655, 1348256, 1505840, 1505841, 1588636, 1615054, 1643325, 1664653; патента РФ N N 2000995, 2009956, 2038259, 2043259, 2051838; патенты США NN 3621501, 4889511; патент Великобритании N 1145051; патент Дании N 103118 и другие).
Из известных устройств наиболее близким к предлагаемому является "Спасательный жилет" (авт. свид. N 1664653, В 63 С 9/20, 1985), который и выбран в качестве прототипа.
Указанный спасательный жилет, одетый на человека, снабжен источником энергии, кабелями подвода энергии к источникам света, патронами, мембранами, рычагами пневмомагистралью двумя источниками света и обеспечивает обнаружение человека, терпящего бедствие на воде.
Однако обнаружить источники света в светлое время и в условиях плохой погоды на больших расстояниях затруднительно.
Технической задачей изобретения является повышение надежности обнаружения и определения местоположения человека, терпящего бедствие на воде, путем использования радиоизлучателя и вертолета.
Поставленная задача решается тем, что система для обнаружения и определения местоположения человека, терпящего бедствие на воде, включающая спасательный жилет, одетый на человека и содержащий два источника света, один из которых расположен в грудной области спасательного жилета, а другой - в заспинной его области, источник тока, два размыкателя электрической цепи и две сообщающиеся герметичные емкости, каждая из которых отделена от окружающей среды мембраной, при этом одна из герметичных емкостей расположена в грудной области спасательного жилета, а другая - в заспинной его области, мембрана каждой емкости связана с размыкателем электрической цепи соответствующего ей источника света посредством рычага, а оба источника света через размыкатели соединены с источником тока параллельно, снабжена двумя миниатюрными передатчиками с передающими антеннами, один из которых расположен в грудной области спасательного жилета, а другой - в заспинной его области, и аппаратурой, установленной на борту вертолета и состоящей из одного измерительного и четырех пеленгационных каналов, причем измерительный канал состоит из последовательно включенных приемной антенны, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, шестого смесителя, второй вход которого соединен с выходам второго гетеродина, усилители второй промежуточной частоты, амплитудного детектора и блока регистрации, каждый пеленгационный канал состоит из последовательно включенных приемной антенны, смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первого промежуточной частоты, перемножителя, второй вход которого соединен с выходом усилителя второй промежуточной частоты, и узкополосного фильтра, при этом к выходу первого узкополосного фильтра последовательно подключены пятый перемножитель, второй вход которого соединен с выходом второго узкополосного фильтра, пятый узкополосный фильтр и первый фазометр, к выходу второго узкополосного фильтра последовательно подключены первая линия задержки, первый фазовый детектор, второй вход которого соединен с выходом второго узкополосного фильтра, и второй фазометр, к выходу третьего узкополосного фильтра последовательно подключены шестой перемножитель, второй вход которого соединен с выходом четвертого узкополосного фильтра, шестой узкополосный фильтр и третий фазометр, к выходу четвертого узкополосного фильтра последовательно подключены вторая линия задержки, второй фазовый детектор, второй вход которого соединен с выходом четвертого узкополосного фильтра, и четвертый фазометр, вторые входы фазометров соединены с выходом опорного генератора, приемная антенна измерительного канала размещена над втулкой винта вертолета, приемные антенны пеленгационных каналов размещены на концах лопастей несущего винта вертолета, двигатель кинематически связан с винтом вертолета и опорным генератором.
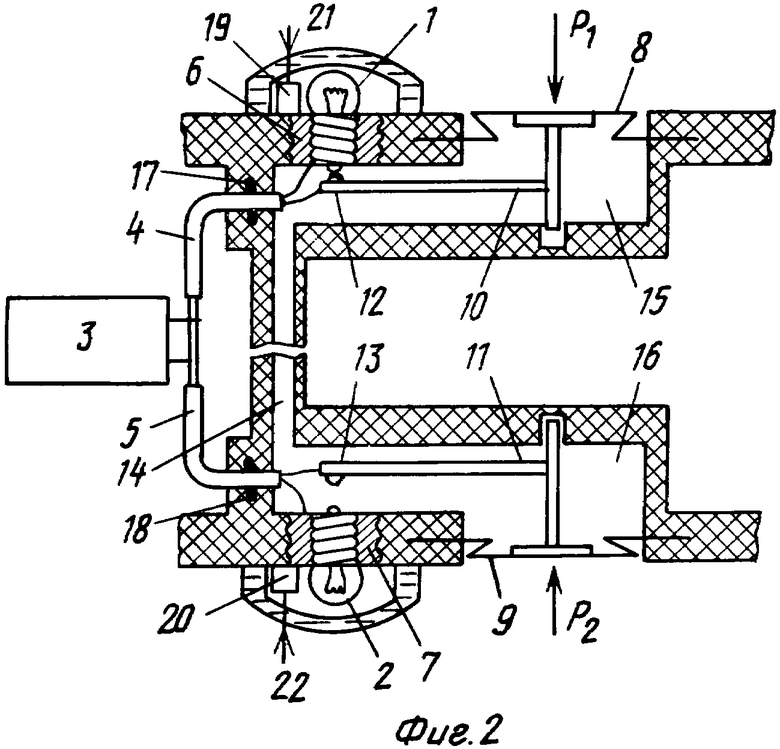
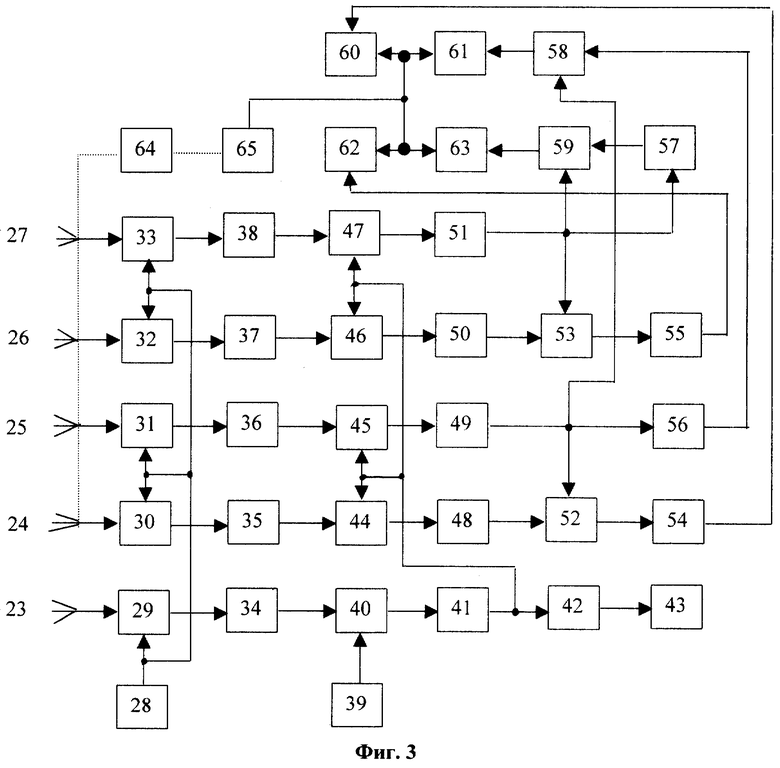
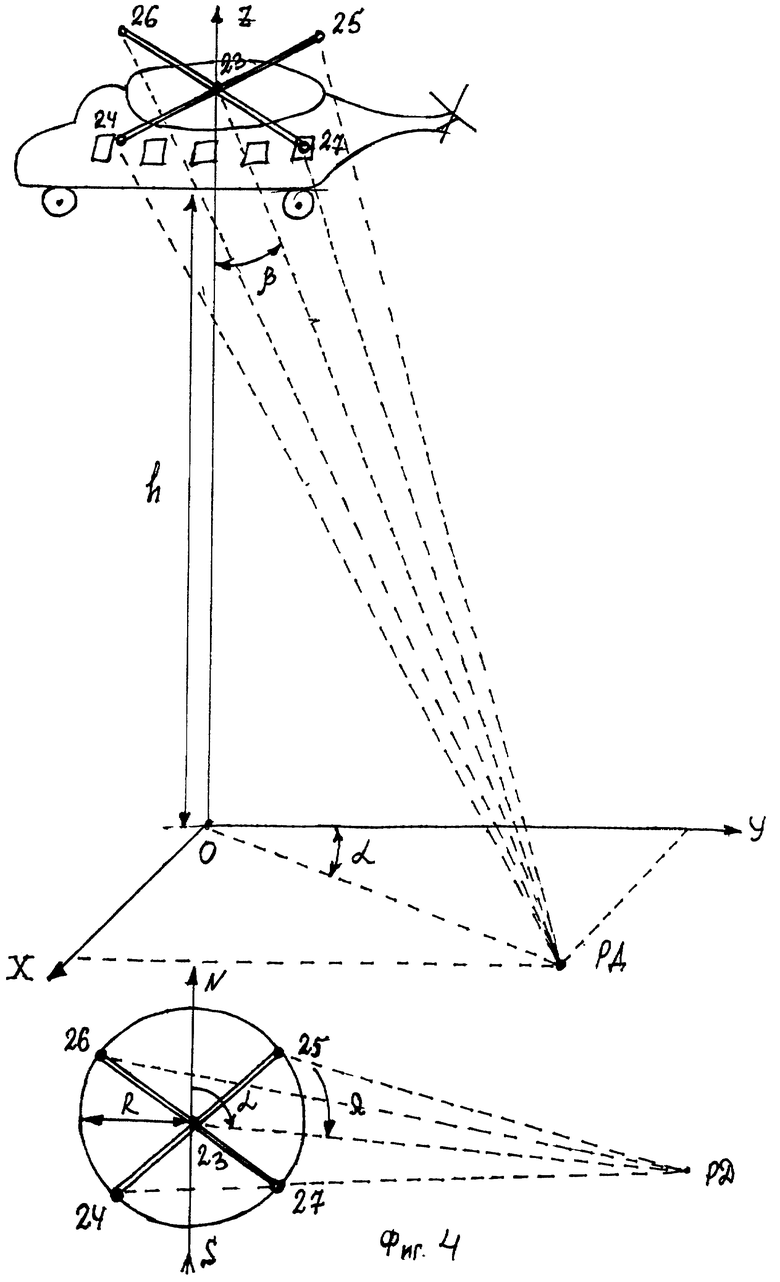
На фиг. 1 схематично изображен спасательный жилет с источниками света 1, 2 и передатчиками 19, 20 с передающими антеннами 21, 22, одетый на человека; на фиг. 2 - то же, разрез. Структурная схема аппаратуры, установленной на вертолете, представлена на фиг. 3. Геометрическая схема расположения приемных антенн на вертолете изображена на фиг. 4.
Спасательный жилет, кроме того, состоит из источника 3 энергии, кабелей 4 и 5 подвода энергии к источникам света 1, 2 и передатчиками 19, 20 с передающими антеннами 21, 22, патронов 6 и 7, мембран 8, 9 и связанных с ними рычагов 10 и 11 с контактами 12 и 13, а также герметичной пневмомагистрали 14, связывающей герметичные воздушные полости 15 и 16, Места ввода кабелей 4 и 5 от источника энергии 3 в полости 15 и 16 загерметизированы уплотнительными кольцами 17 и 18. Источник света 1 и передатчик 19, источник света 2 и передатчик 20 подключены параллельно к источнику энергии 3.
Аппаратура, размещаемая на борту вертолета, содержит измерительный канал и четыре пеленгационных канала. Измерительный канал состоит из последовательно включенных приемной антенны 23, смесителя 29, второй вход которого соединен с выходом первого гетеродина 28, усилителя 34 первой промежуточной частоты, шестого смесителя 40, второй вход которого соединен с выходом второго гетеродина 39, усилителя 41 второй промежуточной частоты, амплитудного детектора 42 и блока 43 регистрации. Каждый пеленгационный канал состоит из последовательно включенных приемной антенны 24 (25, 26, 27), смесителя 30 (31, 32, 33), второй вход которого соединен с выходом первого гетеродина 28, усилителя 35 (36, 37, 38) первой промежуточной частоты, перемножителя 44 (45, 46, 47), второй вход которого соединен с выходом усилителя 41 второй промежуточной частоты, и узкополосного фильтра 48 (49, 50, 51). К выходу первого узкополосного фильтра 48 последовательно подключены пятый перемножитель 52, второй вход которого соединен с выходом второго узкополосного фильтра 49, пятый узкополосный фильтр 54 и первый фазометр 60. К выходу второго узкополосного фильтра 49 последовательно подключены первая линия 56 задержки, первый фазовый детектор 58, второй вход которого соединен с выходом второго узкополосного фильтра 49, и второй фазометр 61. К выходу третьего узкополосного фильтра 50 последовательно подключены: шестой перемножитель 53, второй вход которого соединен с выходом четвертого узкополосного фильтра 51, шестой узкополосный фильтр 55 и третий фазометр 62. К выходу четвертого узкополосного фильтра 51 последовательно подключены вторая линия 57 задержки, второй фазовый детектор 59, второй вход которого соединен с выходом четвертого узкополосного фильтра 51, и четвертый фазометр 63. Вторые входы фазометров 60-63 соединены с выходом опорного генератора 65. Приемная антенна 23 измерительного канала размещена над втулкой винта вертолета, приемные антенны 24-27 пеленгационных каналов размещены на концах лопастей несущего винта вертолета, двигатель 64 кинематически связан с винтом вертолета и опорным генератором 65.
Система работает следующим образом.
В положении, показанном на фиг. 1, давление окружающей среды P2 на мембрану 9 больше, чем атмосферное давление P1 на мембрану 8. Мембрана 9 находится в поджатом, мембрана 8 в отжатом состоянии. Соответственно рычаг 11 отжимает контакт 13 от источника 2 света и передатчика 22, а рычаг 10 поджимает контакт 12 к источнику 1 света и передатчику 19. Источник 1 света горит, передатчик 19 излучает сигнал бедствия, источник 2 света не горит, передатчик 20 не работает.
Если человек совершает поворот относительно горизонтальной оси на 180o, то тогда наверху оказываются источник 2 света и передатчик 20 с передающей антенной 22.
Давление среды на мембрану 8 становится больше, чем на мембрану 9, мембрана 8 поджимается, рычаг 10 размыкает контакт 12 с источником 1 света и передатчиком 19 с передающей антенной 21. Цепь разомкнута, источник 1 света гаснет, передатчик 19 выключается. Одновременно воздух из полости 15 перетекает через магистраль 14 в полость 16, мембрана 9 отжимается, рычаг 11 замыкает контакт 13 с источником 2 света и передатчиком 20 с передающей антенной 22. Источник 2 света загорается, а передатчик 20 излучает сигнал бедствия.
В ночное время и в хорошую погоду источник света может быть обнаружен визуально на значительном расстоянии. Однако в светлое время и в плохую погоду обнаружить источник света затруднительно.
Радиоизлучение является всепогодным и обеспечивает передачу сигнала бедствия на большие расстояния. При этом сигнал бедствия (SOS) излучается периодически с определенным периодом Тп длительностью Тс на определенной частоте Wс, которая отводится специально для передачи сигнала бедствия и не занимается для передачи другой информации.
Приемная аппаратура размещается на борту вертолета. Вертолеты в настоящее время применяются для решения широкого круга задач, таких как медико-эвакуационные операции, спасательные работы при ликвидации аварий, поиск потерпевших бедствие, противопожарное патрулирование, контроль автострад с целью пеленгации угнанных транспортных средств, контроль за маршрутом следования специальных машин, перевозящих в пределах населенных пунктов опасные грузы (например, горючие, взрывчатые вещества и т.п.), определение местоположения источников экологического и стихийного бедствий, обеспечение деятельности морских нефтяных промыслов, геологоразведка и другие. Это возможно благодаря их преимуществам по сравнению с самолетами взлетать и садиться на площадки малооборудованные и ограниченные по размерам.
Наличие вращающегося винта вертолета может быть использовано для определения направления на источник излучения сигнала бедствия (радиодатчик PD) с помощью устройства, антенны которого расположены на концах лопастей несущего винта.
Измерив углы направления на источник излучения сигнала бедствия α,β и зная высоту h полета вертолета, можно определить местоположение указанного источника (человека, терпящего бедствие на воде).
Принимаемые сигналы бедствия:
U1(t) = Vc•Cos[(Wc±ΔW)t+ϕc];
U2(t) = Vc•Cos[(Wc±ΔW)t+ϕc+2πR/λ•Cos(Ω-α)];
U3(t) = Vc•Cos[(Wc±ΔW)t+ϕc-2πR/λ•Cos(Ω-α)];
U4(t) = Vc•Cos[(Wc±ΔW)t+ϕc+2πR/λ•Cos(Ω-β)];
где Vc, Wc, ϕc, Tc - амплитуда, частота, начальная фаза и длительность сигналов бедствия;
ΔW - нестабильность несущей частоты сигнала бедствия, обусловленная различными дестабилизирующими факторами;
R - радиус окружности, на которой размещены приемные антенны 24-27;
Ω = 2πF - скорость вращения приемных антенн 24-27 вокруг приемной антенны 23 (скорость вращения винта вертолета);
α - пеленг на источник излучения сигнала бедствия;
β - угол места источника излучения сигнала бедствия, с выходов приемных антенн 23-27 поступают на первые входы смесителей 29-33, на вторые входы которых подается напряжение первого гетеродина 28
Uг1(t) = Vг1•Cos(Wг1t+ϕг1).
Знаки "+" и "-" перед величинами 2πR/λ•Cos(Ω-α) и 2πR/λ•Cos(Ω-β) соответствуют диаметрально противоположным расположением антенн 24 и 25, 26 и 27 на концах лопастей несущего винта вертолета относительно приемной антенны 23, размещенной над втулкой винта вертолета. На выходе смесителей 29-33 образуются напряжения комбинационных частот. Усилителями 34-38 выделяются напряжения первой промежуточной частоты:
Uпр1(t) = Vпр1•Cos[(Wпр1±ΔW)t+ϕпр1];



где Uпр1=1/2 K1 Uc Vг1;
K1 - коэффициент передачи смесителей;
Uпp1 = Wс - Wг1 - первая промежуточная частота;
ϕпр1= ϕc+ϕг1.
Напряжение Uпp1 (t) с выхода усилителя 34 первой промежуточной частоты поступает на первый вход смесителя 40, на второй вход которого подается напряжение второго гетеродина 39.
Uг2(t) = Vг2•Cos(Wг2t+ϕг2).
На выходе смесителя 40 образуются напряжения комбинированных частот. Усилителем 41 выделяется напряжение второй промежуточной частоты.

где Uпp2 = 1/2 K1 Vпp1 Vг2:
Wпp2 = Wпp1 - Wг2 - вторая промежуточная частота;
ϕпр2= ϕпр1+ϕг2,
которое поступает на второй вход перемножителей 44-47, на первый вход которых подаются напряжения Uпp2-Uпp5(t). На выходе перемножителей образуются напряжения:
U6(t) = V6•Cos[(Wг2t+ϕг2+2πR/λ•Cos(Ω-α)];
U7(t) = V6•Cos[(Wг2t+ϕг2-2πR/λ•Cos(Ω-α)];
U8(t) = V6•Cos[(Wг2t+ϕг2+2πR/λ•Cos(Ω-β)];
где V6 = 1/2 K2 Vпp1 Vпp2;
K2 - коэффициент передачи перемножителей, которые выделяются узкополосными фильтрами 48-51.
Следовательно, полезная информация об углах α и β переносится на стабильную частоту Wг2 второго гетеродина 39. Поэтому нестабильность несущей частоты принимаемых сигналов бедствия, вызванная различными дестабилизирующими факторами, не влияет на результат пеленгации, тем самым повышается точность определения местоположения источника радиоизлучений.
Причем величина Δϕm = 2πR/λ•,
входящая в состав указанных колебаний и называемая индексом фазовой модуляции, характеризует максимальное значение отклонения фазы вращающихся антенн 24-27 относительно фазы 23. Пеленгатор тем чувствительнее к изменению углов α и β, чем больше относительный размер баз R/λ.Однако с ростом R/λ уменьшаются значения угловых координат α и β, при которых разность фаз превосходит значение 2π, т.е. наступает неоднозначность отсчета.
Следовательно, при R/λ < 1/2 наступает неоднозначность отсчета углов α и β. Устранение указанной неоднозначности путем уменьшения соотношения R/λ обычно себя не оправдывает, так как при этом теряется основное достоинство широкобазовой системы. Кроме того, в диапазоне метровых и особенно дециметровых волн брать малые значения R/ часто не удается из-за конструктивных соображений.
часто не удается из-за конструктивных соображений.
Напряжение Uпp6(t) с выхода усилителя 41 второй промежуточной частоты одновременно поступает после детектирования в амплитудном детекторе 42 на вход блока 43 регистрации и тем самым фиксирует обнаружение источника радиоизлучения (человека, терпящего бедствие на воде).
Для повышения точности пеленгации радиодатчика PD в горизонтальной (азимутальной) и вертикальной (угломестной) плоскостях приемные антенны 24 и 25, 26 и 27 располагаются на концах четырех противоположных лопастей несущего винта вертолета. Смещение сигналов от четырех диаметрально противоположных приемных антенн 24 и 25, 26 и 27, находящихся на одинаковом расстоянии R от оси вращения несущего винта, вызывает фазовую модуляцию, которая идентична фазовой модуляции, получаемой с помощью двух приемных антенн, вращающихся по кругу, радиус R1 которых в два раза больше (R1 = 2R).
Действительно, на выходе перемножителей 52 и 53 образуются гармонические напряжения:
U10(t) = V10•Cos(Ω-α);
U11(t) = V10•Cos(Ω-β)]; 0 ≤ t ≤ Tc,
где V10 = 1/2 K2 V6 2;
с индексом фазовой модуляции Δϕm1= 2πR1/λ(R1= 2R). которые выделяются узкополосными фильтрами 54 и 55 соответственно и поступают на первый вход фазометров 60 и 62, на второй вход которых подается напряжение опорного генератора 65.
U6(t) = V6•CosΩt.
Фазометры 60 и 62 обеспечивают точное измерение угловых координат α и β
Для устранения возникающей при этом неоднозначности отсчета углов α и β необходимо уменьшить индекс фазовой модуляции без уменьшения отношения R/λ.
Это достигается использованием двух автокорреляторов, каждый из которых состоит из линии задержки 56 (57) и фазового детектора 58 (59), что эквивалентно уменьшению индекса фазовой до величины Δϕm2= 2πd1/λ , где d1. < R.
На выходе автокорреляторов образуются напряжения:
U12(t) = V12•Cos(Ω-α);
U13(t) = V12•Cos(Ω-β), 0 ≤ t ≤ Tc,
где V12 = 1/2 К3 V6 2;
К3 - коэффициент передачи фазовых детекторов;
с индексом фазовой модуляции Δϕm2= 2πd1/λ, которые поступают на первый вход фазометров 61 и 63, на второй вход которых подается напряжение U0(t) с выхода опорного генератора 65. Фазометры 61 и 63 обеспечивают однозначное измерение угловых координат α и β. По существу фазометры представляют собой две шкалы измерений. Фазометры 60 и 62 представляют собой точные, но неоднозначные шкалы измерений угловых координат α и β а фазометры 61 и 63 - грубые, но однозначные шкалы измерений угловых координат α и β.
Зная высоту h полета вертолета и измерив угловые координаты α и β, можно точно и однозначно определить местонахождение источника излучения сигнала бедствия (человека, терпящего бедствие на воде).
Бортовая аппаратура, установленная на вертолете, инвариантна к нестабильности несущей частоты принимаемых сигналов, так как пеленгация источника излучения сигнала бедствия осуществляется на стабильной частоте Wг2 второго гетеродина 39. Бортовая аппаратура также инвариантна к виду модуляции принимаемых сигналов, если сигналы бедствия имеют модуляцию (манипуляцию) одного из параметров.
Таким образом, предлагаемая система обеспечивает повышение надежности обнаружения человека, терпящего бедствие на воде, и определения его местоположения путем использования радиоизлучателя и вертолета. Для пеленгации источника излучения сигнала бедствия используется дифференциально-фазовый метод, который реализуется на борту вертолета. При этом приемные антенны 24-27 размещаются на концах четырех противоположных лопастей винта вертолета и вращающихся вокруг приемной антенны 23, размещенной над втулкой винта вертолета. Для повышения точности пеленгации радиоизлучателя (радиодатчика) приемные антенны размещаются на диаметрально противоположных концах лопастей винта вертолета. А возникающая при этом неоднозначность пеленгации устраняется автокорреляционной обработкой принимаемых сигналов. Измеряются угловые координаты α и β с помощью четырех фазометров 60 - 63. При этом фазометры 60 и 62 образуют точные, но неоднозначные шкалы измерений угловых координат α и β соответственно, а фазометры 61 и 63 образуют грубые, но однозначные шкалы измерений угловых координат α и β соответственно.
Местоположение источника излучения сигнала бедствия (радиодатчика) осуществляется с использованием измеренных значений азимута α, угла шесть β и высоты h полета вертолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2012 |
|
RU2521456C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2002 |
|
RU2226479C2 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2004 |
|
RU2276038C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2004 |
|
RU2254262C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2003 |
|
RU2240950C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2010 |
|
RU2444461C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2007 |
|
RU2346290C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2001 |
|
RU2206902C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2012 |
|
RU2514131C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2011 |
|
RU2458815C1 |
Изобретение относится к спасательным средствам и может быть использовано для обнаружения человека, терпящего бедствие на воде, и определения его местоположения. Способ содержит спасательный жилет с расположенными в его грудной и заспинной областях источниками света и передатчиками с передающими антеннами, а также аппаратуру, установленную на борту вертолета. Бортовая аппаратура вертолета содержит приемные антенны 23-27, смесители 30-33, 40, усилители 35-38 первой промежуточной частоты, первый и второй гетеродины 28 и 39, усилитель 41 второй промежуточной частоты, перемножители 44-47, 52, 53, узкополосные фильтры 48-51, 54, 55, амплитудный детектор 42, блок 43 регистрации, линии задержки 56 и 57, фазовые детекторы 58 и 59, фазометры 60-63, двигатель 64, опорный генератор 65. Такое выполнение системы обеспечивает повышение надежности обнаружения и определения местоположения человека, терпящего бедствие на воде. 4 ил.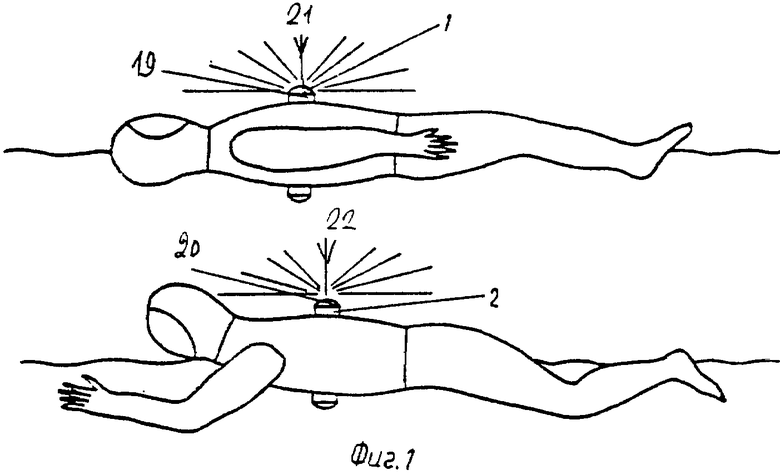
Система для обнаружения и определения местоположения человека, терпящего бедствие на воде, включающая спасательный жилет, одетый на человека и содержащий два источника света, один из которых расположен в грудной области спасательного жилета, а другой - в заспинной его области, источник тока, два размыкателя электрической цепи и две сообщающиеся герметичные емкости, каждая из которых отделена от окружающей среды мембраной, при этом одна из герметичных емкостей расположена в грудной области спасательного жилета, а другая - в заспинной его области, мембрана каждой емкости связана с размыкателем электрической цепи соответствующего ей источника света посредством рычага, а оба источника света через размыкатели соединены с источником тока параллельно, отличающаяся тем, что она снабжена двумя миниатюрными передатчиками с передающими антеннами, один из которых расположен в грудной области спасательного жилета, а другой - в заспинной его области, и аппаратурой, установленной на борту вертолета и состоящей из одного измерительного и четырех пеленгационных каналов, причем измерительный канал состоит из последовательно включенных приемной антенны, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, шестого смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя второй промежуточной частоты, амплитудного детектора и блока регистрации, каждый пеленгационный канал состоит из последовательно включенных приемной антенны, смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, перемножителя, второй вход которого соединен с выходом усилителя второй промежуточной частоты, и узкополосного фильтра, при этом к выходу первого узкополосного фильтра последовательно подключены пятый перемножитель, второй вход которого соединен с выходом второго узкополосного фильтра, пятый узкополосный фильтр и первый фазометр, к выходу второго узкополосного фильтра последовательно подключены первая линия задержки, первый фазовый детектор, второй вход которого соединен с выходом второго узкополосного фильтра, и второй фазометр, к выходу третьего узкополосного фильтра последовательно подключены шестой перемножитель, второй вход которого соединен с выходом четвертого узкополосного фильтра, шестой узкополосный фильтр и третий фазометр, к выходу четвертого узкополосного фильтра последовательно подключены вторая линия задержки, второй фазовый детектор, второй вход которого соединен с выходом четвертого узкополосного фильтра, и четвертый фазометр, вторые входы фазометров соединены с выходом опорного генератора, приемная антенна измерительного канала размещена над втулкой винта вертолета, приемные антенны пеленгационных каналов размещены на концах лопастей несущего винта вертолета, двигатель кинематически связан с винтом вертолета и опорным генератором.
| Спасательный жилет | 1989 |
|
SU1664653A1 |
| DE 4311473 A1, 13.10.1994 | |||
| 0 |
|
SU162430A1 | |
| DE 3600802 A1, 16.07.1987. | |||

