Изобретение относится к системам и устройствам для определения причин дорожно-транспортных происшествий, а также может использоваться в устройствах для обеспечения безопасности движения транспортных средств.
Известно устройство «Тахограф Кинцле 1318», производства Германии и выпускаемое по лицензии фирмой «ФДО автомобильные компоненты» на Чистопольском часовом заводе (Журнал «За рулем», №11, 1999 г., стр. 53).
Известное устройство содержит датчик скорости, тахограф, накопитель информации диаграммный диск на специальной бумаге. Записанная информация не позволяет достоверно восстановить причину дорожно-транспортного происшествия.
Другим известным устройством является «Система для регистрации и предотвращения дорожно-транспортных происшествий (Патент Великобритании. GB 2268608 А, М. Кл. 5 G 07 G 5/08). Известная система контролирует и регистрирует информацию, связанную с работой автомобиля, состояние двигателя и окружающей среды. Известная система направлена на предотвращение дорожно-транспортных происшествий посредством предупреждения водителя о возникших неисправностях, однако по записанной информации невозможно восстановить причину и предаварийную ситуацию дорожно-транспортного происшествия.
Наиболее близким к заявленному изобретению по технической сущности является «Устройство контроля за безопасностью движения автомобильного транспорта», имеющее максимальное количество сходных существенных признаков с признаками заявленного устройства и поэтому принятого за прототип (Патент Российской Федерации №2193233).
Известное устройство-прототип содержит датчик угловой скорости 1, датчики органов управления 2, накопитель информации 3, пульт управления 4, датчик времени 5, микропроцессор 6, дисплей 7, второй датчик угловой скорости 8, контроллер 9. При этом первый и второй входы/выходы микропроцессора 6 соединены соответственно с датчиком времени 5 и с накопителем информации 3 для записи в накопитель 3 и считывания из него сигналов датчиков с указанием времени записи. Первый и второй выходы микропроцессора 6 подключены соответственно к дисплею 7 и контроллеру 9 для подключения к его выходу переносного блока памяти. Первый и второй входы микропроцессора 6 подключены соответственно к датчикам скорости левого 1 и правого 8 управляемых колес автомобиля, а пульт управления 4 подключен к третьему входу микропроцессора 6 для включения программы микропроцессора 6, по которой осуществляется чтение информации из накопителя 3 и расчет параметров движения автомобиля.
Известное устройство работает следующим образом. Устройство работает в двух режимах: записи и контроля. Режим записи осуществляется во время движения автомобиля, когда в накопитель информации 3 с установленным дискретом во времени записываются: реальное время, получаемое от датчика времени 5, скорости вращения левого и правого управляемых колес, сигналы датчиков органов управления автомобилем. Режим записи информации осуществляется микропроцессором 6 в соответствии с программным обеспечением.
Режим контроля осуществляется во время стоянки автомобиля. Во время контроля каждый воспроизводимый дискрет времени сопровождается характеристикой движения автомобиля и действиями водителя. При этом на дисплее 7 высвечивается: время, скорость движения, радиус и направление поворота, направление движения, эффективность работы тормозной системы и сигналы датчиков органов управления.
К выходу контроллера 9 может подключаться переносной блок памяти, который используется при дорожно-транспортных происшествиях или при автоматизированном учете и планировании использования транспортных средств.
Однако данное устройство не позволяет полностью восстановить предаварийную ситуацию дорожно-транспортного происшествия.
Так в известном устройстве - прототипе в случае дорожно-транспортного происшествия, когда автомобиль движется с полной блокировкой колес («юзом»), полностью теряется контроль за движением автомобиля (направлением движения, скоростью замедления), не определяется момент и время столкновения транспортных средств или наезд на препятствие. Не может быть определено состояние дорожного покрытия во время ДТП.
Целью предлагаемого устройства является восстановление предаварийной ситуации дорожно-транспортного происшествия в реальном масштабе времени.
Поставленная цель в «Устройстве регистрации для определения причин дорожно-транспортных происшествий» достигается тем, что в нем, как и в прототипе, содержится датчик угловой скорости, датчики органов управления, накопитель информации, микропроцессор и контроллер.
При этом первый вход/выход микропроцессора соединен с накопителем информации для записи в накопитель и считывания из него сигналов соответствующих датчиков с указанием относительного времени записи. К первому и второму входам микропроцессора подключены соответственно датчики органов управления и датчик угловой скорости.
При этом выход микропроцессора подключен к контроллеру, предназначенному для подключения к его выходу переносного блока памяти.
Дополнительно в устройство включены таймер реального времени, блок светодиодов, датчик угла наклона, гироскоп, датчики линейных ускорений x, z, переносной блок памяти, второй контроллер, блок регистрации и анализа информации о ДТП.
Второй выход микропроцессора подключен к блоку светодиодов для осуществления сигнализации о состоянии поверхности дорожного покрытия. К третьему входу микропроцессора подключен таймер реального времени, по сигналам которого осуществляется синхронизация записи информации и работа микропроцессора. Четвертый, пятый, шестой х и седьмой z входы микропроцессора, которые являются входами его аналого-цифровых преобразователей, подключены соответственно к датчику угла наклона, гироскопу и датчикам линейных ускорений x, z.
При подключении переносного блока памяти ко входу первого контроллера вся информация накопителя переписывается в переносной блок памяти, который затем подключается ко входу второго контроллера, выход которого соединен со входом блока регистрации и анализа информации о ДТП, где в соответствии с программным обеспечением по информации датчиков осуществляется анализ ДТП, который заключается в выявлении причин их возникновения.
Причем переносной блок памяти, второй контроллер и блок регистрации и анализа являются достоянием Государственной инспекции безопасности дорожного движения (ГИБДД).
В известных технических решениях признаков, сходных с отличительными признаками заявленного устройства, не обнаружено, вследствие чего можно считать, что предлагаемое устройство соответствует изобретательскому уровню.
Использование данного устройства при его реализации позволяет устанавливать причину дорожно-транспортного происшествия.
Сущность предлагаемого «Устройства регистрации для определения причин дорожно-транспортных происшествий» поясняется чертежами, где представлены:
на фиг.1 - структурная схема прототипа;
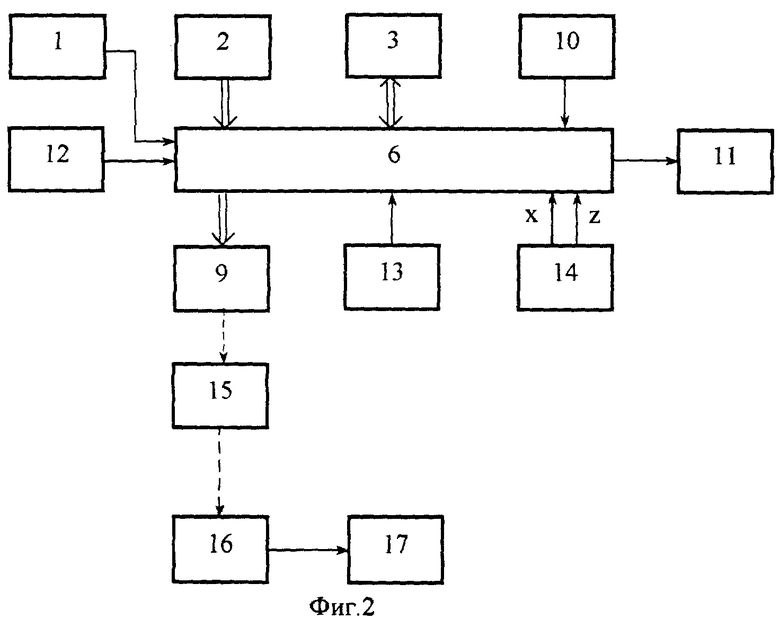
на фиг.2 - структурная схема предлагаемого устройства;
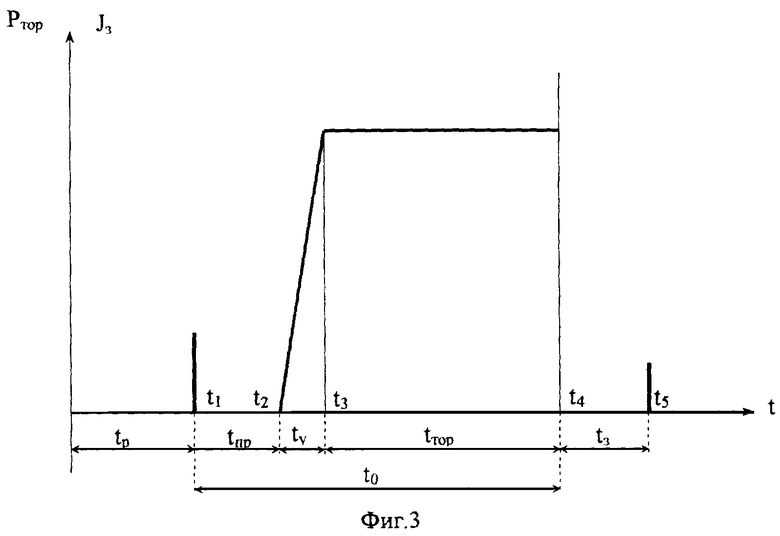
на фиг.3 - рисунок, поясняющий изменение тормозной силы (Ртор) и замедления (Jз) в процессе торможения автомобиля;
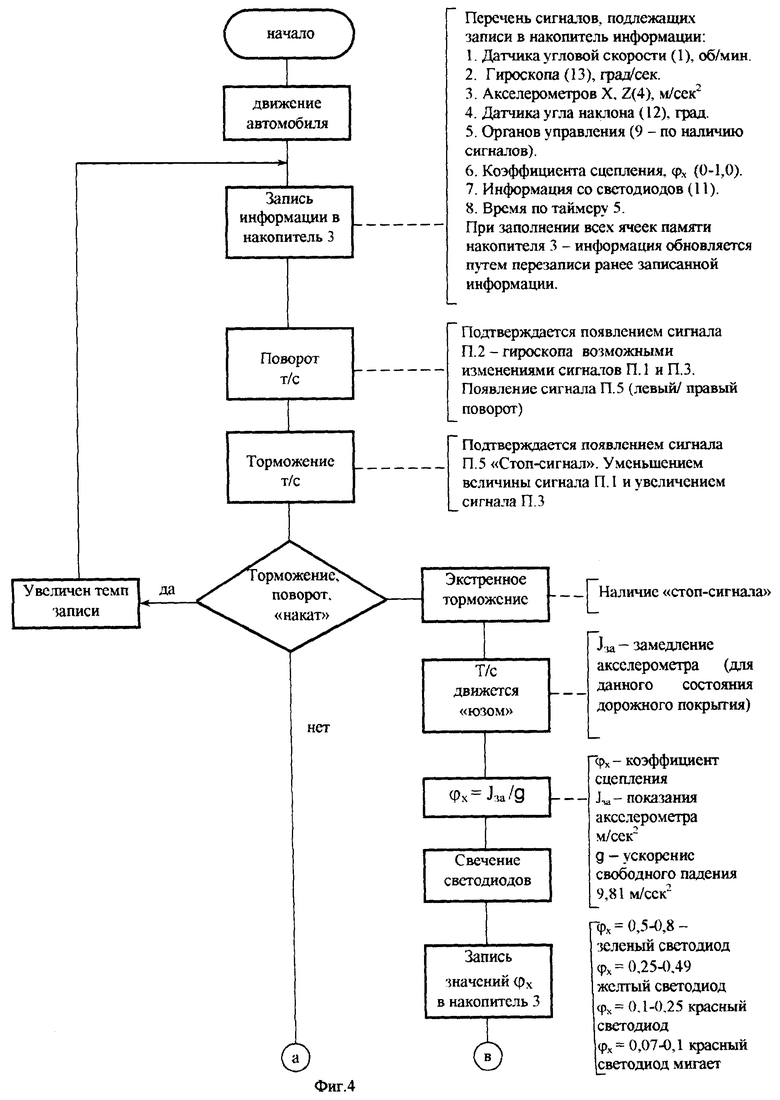
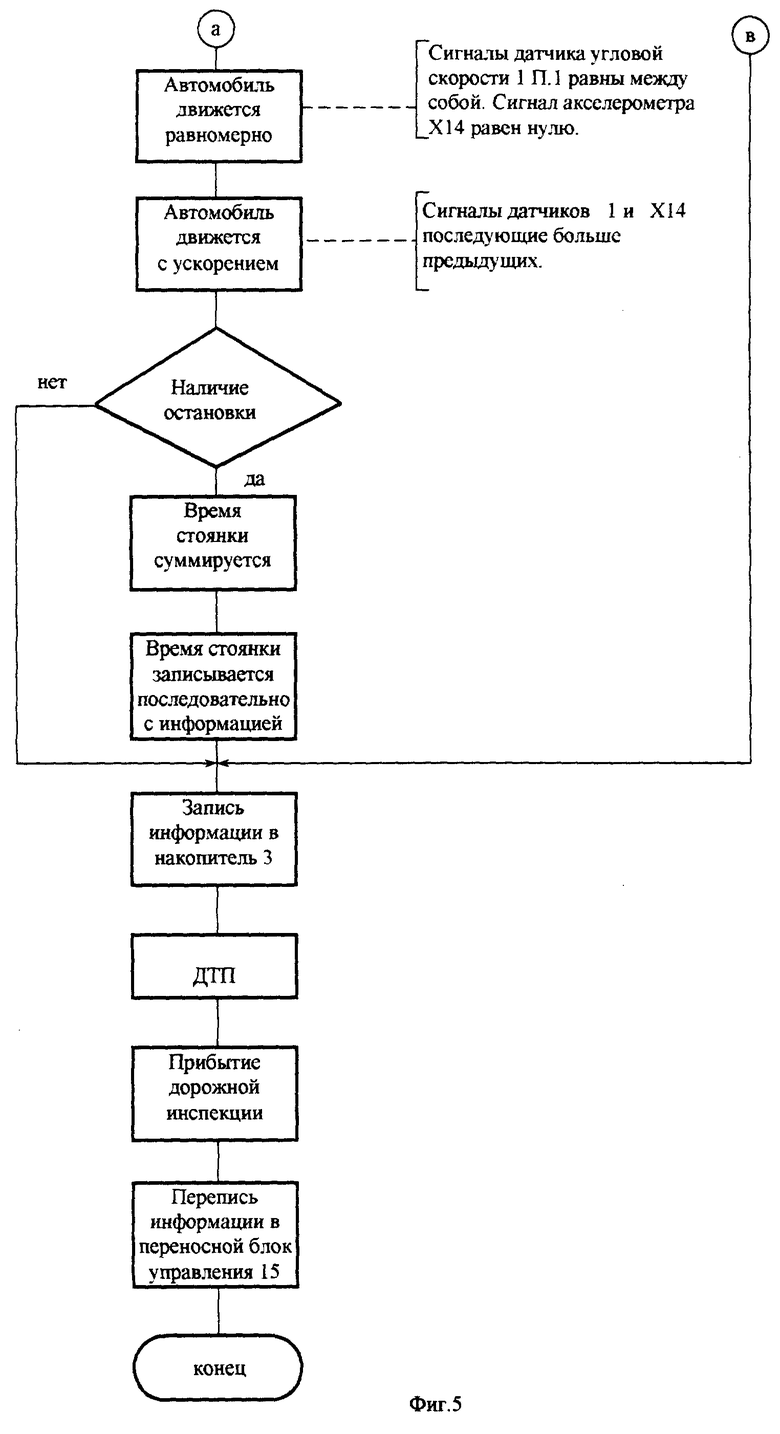
на фиг.4, 5 - алгоритм работы микропроцессора 6.
Предлагаемое «Устройство регистрации для определения причин дорожно-транспортных происшествий», как и прототип, содержит датчик угловой скорости 1, датчики органов управления 2, накопитель информации 3, микропроцессор 6, первый контроллер 9.
При этом первый вход/выход микропроцессора 6 соединен с накопителем информации 3 для записи в накопитель 3 и считывания из него сигналов соответствующих датчиков с указанием относительного времени записи.
К первому и второму входам микропроцессора 6 подключены соответственно датчики органов управления 2 и датчик угловой скорости 1.
При этом выход микропроцессора 6 подключен к первому контроллеру 9, предназначенному для подключения к его выходу переносного блока памяти 15.
Дополнительно в устройство включены таймер реального времени 10, блок светодиодов 11, датчик угла наклона 12, гироскоп 13, датчики линейных ускорений x, z 14, переносной блок памяти 15, второй контроллер 16 и блок регистрации и анализа ДТП 17.
Второй выход микропроцессора 6 подключен к блоку светодиодов 11 для осуществления сигнализации о состоянии поверхности дорожного покрытия.
К третьему входу микропроцессора подключен таймер реального времени 10, по сигналам которого осуществляется синхронизация записи информации и работа микропроцессора 6.
Четвертый, пятый, шестой х и седьмой z входы микропроцессора 6, которые являются входами аналого-цифровых преобразователей, подключены соответственно к датчику угла наклона 12, гироскопу 13 и датчикам линейных ускорений х, z 14.
При подключении к выходу первого контроллера 9 переносного блока памяти 15 вся информация накопителя 3 переписывается в переносной блок памяти 15, который затем подключается ко входу второго контроллера 16, выход которого соединен со входом блока регистрации и анализа 17, где в соответствии с программным обеспечением по информации датчиков осуществляется анализ ДТП, который заключается в выявлении причин их возникновения.
Переносной блок памяти 15, второй контроллер 16, блок регистрации и анализа 17 являются достоянием Государственной инспекции безопасности дорожного движения (ГИБДД).
Конструктивное исполнение предлагаемого устройства
Конструктивно предлагаемое устройство представляет собой прямоугольный, герметичный, дюралевый блок, внутри которого размещается плата.
На плате размещены: накопитель информации 3, микропроцессор 6, первый контроллер 9, таймер реального времени 11, датчик угла наклона 12, гироскоп 13 и датчики линейных ускорений x, z 14.
Накопитель информации 3 выполнен на микросхеме энергонезависимой памяти. При отключении питающего напряжения ранее записанная информация сохраняется. Объем памяти накопителя 3 должен обеспечить непрерывную работу устройства. Накопитель информации 3 подключен к двунаправленному порту ввода/вывода информации микропроцессора 6.
Микропроцессор 6 выполнен на высокопроизводительном микропроцессоре семейства PIC 18, который содержит высокопроизводительное ядро, работающее на тактовой частоте 40 МГц, программируемую память, оперативную память, 10-разрядные аналого-цифровые преобразователи, таймеры, аппаратный вычислитель с возможностью программирования. Микропроцессор 6 имеет необходимое количество входов и выходов для подключения датчиков устройства.
Первый 9 и второй 16 контроллеры имеют соответствующие выходы для подключения переносного блока памяти 15. Первый контроллер 9 подключается к первому выходу микропроцессора 6, второй 16 к входу блока регистрации и анализа 17.
Таймер 10 - в качестве таймера 10 используется низкочастотный генератор реального времени с тактовой частотой 32,768 кГц. Тактовая частота таймера 10 поступает на третий вход микропроцессора 6 и синхронизирует в реальном масштабе времени запись информации в накопитель 3 и работу микропроцессора 6.
Датчик угла наклона 12 предназначен для определения профиля дорожного покрытия. Датчик угла наклона 12 - аналоговый датчик с электрическим выходным сигналом, пропорциональным углу наклона. Датчик 12 подключается к четвертому аналоговому входу микропроцессора 6, где аналого-цифровым преобразователем преобразуется в цифровой код.
Гироскоп 13 - пьезокерамический прибор, предназначенный для контроля положения и угловых скоростей поворота транспортных средств. Гироскоп 13 подключен к пятому аналоговому входу микропроцессора 6, где аналого-цифровым преобразователем сигнал гироскопа 13 преобразуется в цифровой код. Гироскоп 13 выполнен в виде микросхемы и имеет указания по его установке.
Датчики линейных ускорений х, z 14 - пьезокерамические приборы, которые предназначены: датчик линейных ускорений х - для измерения ускорения или замедления транспортного средства в направлении движения, а датчик линейных ускорений z - для измерения вертикальных перемещений, характеризующих состояние дорожного покрытия, подключены к шестому х и седьмому z аналоговым входам микропроцессора 6, где аналого-цифровыми преобразователями сигналы датчиков линейных ускорений х, z 14 преобразуются в цифровые коды. Датчики линейных ускорений х, z 14 выполнены в виде микросхемы и имеют указания по их установке.
Датчик угловой скорости 1 - тахогенератор, по его угловой скорости вращения определяется скорость движения транспортного средства. Датчик угловой скорости 1 включается в разрыв гибкого вала спидометра или подключается параллельно спидометру автомобиля. Датчик угловой скорости подключен ко второму входу микропроцессора 6.
Датчики органов управления 2 - контрольные лампы и приборы автомобиля, по включению которых можно достоверно определять действия водителя в сложившейся дорожной ситуации. Сигналы датчиков органов управления 2 поступают на первый вход микропроцессора 6.
Блок регистрации и анализа 17 - IBM PC с соответствующим программным обеспечением.
Предлагаемое устройство работает следующим образом. Устройство в своем составе содержит низкочастотный генератор. В качестве низкочастотного генератора используется таймер 10 реального времени. Вся информация в накопитель 3 записывается в масштабе реального времени в соответствии с очередностью ее поступления с соответствующих датчиков.
При полностью заполненной памяти накопителя 3 информация в накопителе 3 обновляется путем последовательной перезаписи ранее записанной информации, при этом и время записи обновляется началом относительного отсчета в реальном масштабе времени таймера 10.
При движении автомобиля в накопитель информации 3 записывается:
- угловая скорость вращения датчика 1: ω, рад/сек;
- информация параметров движения транспортного средства, получаемая от гироскопа 13: α, град/сек;
- информация об ускорении или замедлении автомобиля, получаемая от датчика линейного ускорения х 14: J, м/сек2;
- информация о измерении вертикальных перемещений, получаемая от датчика линейного ускорения z 14: J, м/сек2;
- информация датчиков органов управления 2 автомобилем: стоп-сигнал, правого и левого поворотов, аварийного состояния тормозной системы, включения заднего хода, включения стояночных огней правого и левого бортов, включения стояночного тормоза. Количество сигналов может меняться в зависимости от типа автомобиля;
- информация о состоянии дорожного покрытия, коэффициент сцепления ϕ;
- информация о профиле дорожного покрытия, определяемая датчиком угла наклона 12, град.
Информация с датчиков снимается постоянно, но дискрет записи в накопитель 3 определяется режимом движения автомобиля. При равномерном движении информация датчиков угловой скорости 1, датчика угла наклона 12, гироскопа 13 и датчиков линейных ускорений х, z 14 записываются при их изменении, а сигналы датчиков органов управления 2 - по мере их поступления.
При торможении и повороте или при движении «накатом» дискрет записи информации в накопитель 3 возрастает и определяется программно установленным временным интервалом.
Во время движения автомобиля определяется коэффициент сцепления ϕ.
Коэффициент сцепления ϕ определяет состояние дорожного покрытия и износ шин автомобиля.
При движении в населенном пункте - частые остановки перед светофорами, перекрестками и другие непредвиденные остановки вынуждают иногда водителя применять экстренное торможение, при котором колеса доводятся до «юза», то есть блокируются между шиной и дорогой. В этом случае показания датчика угловой скорости 1 равны нулю.
Появляется возможность оценить состояние дорожного покрытия - определить коэффициент сцепления ϕ, который вычисляется по формуле:
ϕ=Jз/g,
где ϕ - коэффициент сцепления, 0-1,0;
Jз - максимальное замедление автомобиля, м/сек2.
Максимальное замедление Jз определяется по величине сигнала датчика линейных ускорений х-14, м/сек2.
g - ускорение свободного падения, м/сек2 (g=9,81 м/сек2).
Вычисленный коэффициент сцепления ϕ вносится в оперативную память микропроцессора 6 и накопитель 3.
Блок светодиодов 11 содержит 3 светодиода - зеленый, желтый и красный. При вычислении коэффициента сцепления ϕ могут быть получены следующие результаты:
- коэффициент сцепления ϕ определен в диапазоне от 0,5 до 0,8. Это означает, что поверхность дорожного покрытия сухая и чистая. В блоке светодиодов 11 загорается зеленый светодиод;
- коэффициент сцепления ϕ определен в диапазоне от 0,25 до 0,49. Следовательно, поверхность дорожного покрытия мокрая или грязная. В блоке светодиодов 11 загорается желтый светодиод, что является предупреждением водителю, что тормозной путь будет значительно больше, чем в первом случае;
- коэффициент сцепления ϕ определен в диапазоне от 0,1 до 0,24, следовательно, поверхность дорожного покрытия покрыта льдом, сырая, грязная или засаленная. В блоке светодиодов 11 загорается красный светодиод, что является предупреждением водителю об опасном состоянии дорожного покрытия и требуется особая осторожность в управлении автомобилем. Коэффициент сцепления ϕ определен в диапазоне от 0,07 до 0,1 - поверхность дорожного покрытия оледенела, засалена, красный светодиод мигает, что является предупреждением водителю о чрезвычайной осторожности в управлении автомобилем или прекращении движения.
Характер ДТП многообразен, но в основном - это столкновение и наезд на транспорт, препятствия, пешехода, велосипедиста, животное и гужевой транспорт.
Анализ ДТП заключается в выявлении причин их возникновения и осуществляется блоком регистрации и анализа 17 в соответствии с программным обеспечением.
После ДТП транспортные средства могут освободить проезжую часть, съехав на обочину, так как информации датчиков достаточно для восстановления места и момента дорожного происшествия. Прибывшая на место происшествия дорожная инспекция использует переносной блок памяти 15.
Переносной блок памяти 15 подключается к первому контроллеру 9, при этом вся информация накопителя 3 переписывается в переносной блок памяти 15.
Информация накопителя 3 в переносной блок памяти 15 записывается в соответствии с последовательностью ее записи по таймеру реального времени 10.
Затем переносной блок памяти 15 подключается по второму контроллеру 16 и информация блока памяти 15 переписывается в память блока регистрации и анализа 17.
В случае серьезного ДТП, когда нет возможности подключить переносной блок памяти 15 к контроллеру 9 - устройство снимается и информация накопителя 3 через контроллеры 9 и 16 переписывается в память блока регистрации и анализа 17 в стационарных условиях.
При анализе ДТП прежде всего осуществляется идентификация устройств, то есть его принадлежность данному транспортному средству.
С учетом переписанной информации устанавливается место и время ДТП.
По данным датчика угла наклона 12 гироскопа 13, датчика угловой скорости 1 и датчиков линейных ускорений х и z 14 воспроизводится путь движения автомобиля до ДТП и после, если транспортное средство покинуло место происшествия с целью освобождения проезжей части.
Направление движения определяется гироскопом 13. При прямолинейном движении с выхода гироскопа снимается напряжение, равное определенной величине. При уменьшении или увеличении этого напряжения автомобиль соответственно делал левый или правый поворот, а скорость изменения напряжения соответствует скорости изменения направления движения. Напряжение гироскопа 13 поступает на аналоговый вход микропроцессора 6, где аналого-цифровым преобразователем преобразуется в цифровой код.
Наглядное представление процесса торможения автомобиля дает диаграмма, см. Фиг.3, иллюстрирующая изменение тормозной силы Pтор и замедления автомобиля Jз за время t0.
Отсутствие торможения характеризуется также отсутствием сигнала датчика линейного ускорения х-14 (Jз=0) и отсутствием стоп-сигнала, наличие которого обусловлено нажатием на педаль тормоза. На Фиг.3 отсутствие торможения обозначено интервалом времени tp.
При нажатии на педаль тормоза - появляется стоп-сигнал, который записывается в накопитель 3 (Фиг.3, время t1).
Временной интервал tпр - время срабатывания привода от начала нажатия на педаль - приход стоп-сигнала (Фиг.3, t1) до возникновения замедления Jз (Фиг.3, время t2), которое фиксируется появлением сигнала Jз датчика линейного ускорения х 14 и уменьшением угловой скорости датчика 1. За время tпр происходит перемещение деталей привода ty - время увеличения замедления Jз от нуля (начало действия тормозов) (Фиг.3, t2) до максимального значения Jз (Фиг.3, t3), при этом уменьшается угловая скорость датчика 1 и увеличивается сигнал замедления Jз датчика линейного ускорения х 14 до максимального значения.
В интервале времени ty, когда угловая скорость датчика 1 уменьшится на 20-30% в сравнении с началом торможения (Фиг.3, t2), сила сцепления шин автомобиля с дорожным покрытием достигается своего максимального значения (Рсцп.макс) (Фиг.3).
Дальнейшее нажатие на педаль тормоза приводит к движению автомобиля "юзом".
При максимальной силе сцепления (Рсцп.макс) вычисляется коэффициент сцепления ϕ.
По показаниям датчика угловой скорости 1 и скорости замедления Jз, датчика линейного ускорения 14 определяется характер торможения, работа тормозного привода.
Так сумма tпр+ty - есть время срабатывания тормозного привода. А общее время (to) с момента нажатия на педаль (Фиг.3, t1) до дорожного происшествия (Фиг.3, t4) равно t0=tпр+ty+tтор,
tтор - интервал времени экстренного торможения;
tз - интервал времени, фиксирующий прибытие дорожной инспекции после свершившегося ДТП;
t5 - время записи информации в переносной блок памяти 15.
По информации датчиков в блоке регистрации и анализа 17 определяем необходимое расстояние торможения до полной остановки автомобиля.
где Sтор - необходимое расстояние торможения, м;
Vн - начальная скорость торможения (Фиг.3, t2), вычисленная датчиком угловой скорости 1 в момент времени t2, м/сек2;
kэ - коэффициент, учитывающий износ, регулировку и загрязнение
тормозных механизмов
ϕ - коэффициент сцепления;
g - ускорение силы тяжести (9,81 м/сек2).
Определяем необходимое время торможения (tн), исключающее ДТП.
где tн - необходимое время торможения, исключающее ДТП, сек;
Sтор - требуемое расстояние экстремального торможения, м;
Jз - замедление движения автомобиля, м/сек2, получаемое от датчика линейного ускорения х 14, м/сек2 в интервале времени tтор.
При столкновении или наезде (ДТП)
tн всегда будет больше tтор (Фиг.3).
Во время t4 по показаниям датчика линейного ускорения х 14 определяется сила удара, м/сек2.
Временные интервалы, обозначенные на Фиг.3, определяются в соответствии сигналов реального времени таймера 10 по сигналам датчика угловой скорости 1, датчиков органов управления 2 (стоп-сигнал), гироскопа 13 и датчика линейной скорости х 14.
Наличие этих данных позволяет рассчитать также скорость движения автомобиля в любой временной точке t1, t2, t3, t4 и определить тормозной путь Sтор(t2-t3) в интервале времени tтор (Фиг.3).
Фиг.3 воспроизводится на мониторе блока регистрации и анализа 17 с цифровыми данными всех временных интервалов, скорости движения и тормозного пути.
Введение топографического банка данных в программное обеспечение блока регистрации и анализа 17 позволяет осуществить топографический анализ ДТП.
В топографический банк данных ДТП записаны карта города или района и линейные графики ДТП.
В зависимости от целей топографического анализа на карте условно обозначаются места, виды ДТП и тяжесть их последствий. В результате на карте наглядно выявляются очаги ДТП. На этой основе можно анализировать причины их возникновения и принимать меры по устранению этих причин.
Линейные графики ДТП составляются для автомобильной дороги или ее участка. Это позволяет более подробно классифицировать ДТП, нанося условные обозначения ДТП на график. Концентрация ДТП на графике свидетельствует о неудовлетворительных дорожных условиях в очагах ДТП.
Накопленная информация позволяет составить масштабную схему ДТП, на которой с помощью символов отображают транспортные средства, участвовавшие в ДТП, направление их движения и другие данные. Вся перечисленная информация, карта ДТП, линейный график ДТП и масштабная схема ДТП наглядно отображаются на мониторе блока регистрации и анализа 17.
Следовательно, предлагаемое устройство позволяет определить:
- скорость и направление движения автомобиля;
- действия водителя перед ДТП и в момент ДТП;
- состояние дорожного покрытия (выбоины ямы и различного рода неровности - определяется по информации датчика линейных ускорений z 14);
- наличие торможения;
- характер торможения;
- интервал времени (t0) между нажатием на педаль тормоза (фиг.3, t1) и моментом ДТП (фиг.3, t4);
- время срабатывания тормозного привода - tпр( фиг.3);
- время увеличения замедления движения - ty (фиг.3);
- время экстренного торможения (торможения с максимальным замедлением) tтор (фиг.3);
- определяется коэффициент сцепления ϕ, его максимальное значение на месте ДТП;
- вычисляется необходимое время и тормозной путь (tн) и Sтор, которые обеспечивали исключение ДТП;
- вычисляется тормозной путь экстренного торможения Sтор в интервале времени tтор (фиг.3);
- вычисляется скорость движения автомобиля в любой временной точке t1-t4 (фиг.3) (по информации датчика угловой скорости 1);
V=nk*r м/сек, 
где V - скорость движения автомобиля;
n - угловая скорость датчика 1, рад/сек (об/мин);
r - радиус колеса, м;
π - 3,14...
- вычисляется радиус поворота R (по информации гироскопа 13);
- определяется профиль дорожного покрытия (по информации датчика угла наклона 12);
- по информации датчика угловой скорости, датчиков органов управления 2, датчика угла наклона 12, гироскопа 13 и датчика линейных ускорений х 14 может быть восстановлен маршрут движения транспортного средства;
- проводится топографический анализ ДТП, при котором в блоке регистрации и анализа 17 анализируются ДТП, осуществляется обработка их количественным и качественным методом.
Безопасность дорожного движения - многогранная комплексная проблема.
Положительным эффектом предложенного устройства регистрации является: выявление причин дорожно-транспортных происшествий, анализа причин аварийности (топографический анализ) и оценка безопасности дорожного движения. Полученные результаты помогают принимать соответствующие меры по устранению причин аварийности.
Предлагаемое «Устройство регистрации для определения причин дорожно-транспортных происшествий" может быть реализовано следующим образом:
- датчик угловой скорости 1 - тахогенератор, напряжение тока которого пропорционально угловой скорости вращения колес автомобиля;
- датчики органов управления 2 - соответствующие датчики автомобиля;
- накопитель информации 3 - микросхема энергонезависимой памяти, микросхема Flach Memory, семейства АТ-29 или АТ-49, фирмы ATMEL, автор Гребнев В.В., изд. Санкт-Петербург. ЭФО, 1997 г.;
- микропроцессор 6 - однокристаллический микропроцессор семейства PIC18;
- первый 9 и второй 16 контроллеры - типа FLASH-CAPD для подключения переносного блока управления 15;
- таймер 5 - низкочастотный генератор реального времени с частотой 32,768 кГц;
- датчик угла наклона 12 - магнитный датчик угла типа PMP-S5LX, Бараночников М.Л. «Микромагнитоэлектроника» Т1, Москва, ДМК, Пресс 2001 г. (серия учебник).
- гироскоп 13 - пьезокерамический гироскоп FNN-05D-52 производства фирмы Murata;
- датчики линейных ускорений х и z 14 - пьезокерамические приборы типа ADXL202/JOC/AOC;
- блок регистрации и анализа 17 - комплект персональной ЭВМ с программным обеспечением, для проведения анализа ДТП.
Литература
1. «Основы теории автомобиля...», учебное пособие механических специальных вузов. - М.: Высшая школа, 1970 г. Иванов В.В., Илларионов В.А. и др.
Изобретение относится к устройствам для определения причин дорожно-транспортных происшествий (ДТП) и может использоваться в устройствах для обеспечения безопасности движения транспортных средств. Достигаемый технический результат - восстановление предаварийной ситуации ДТП в реальном масштабе времени. Устройство для определения причин ДТП содержит датчик угловой скорости, датчики органов управления, накопитель информации, микропроцессор, два контроллера, таймер реального времени, блок светодиодов, датчик угла наклона, гироскоп, датчики линейных ускорений, переносной блок памяти, блок регистрации и анализа ДТП. 5 ил.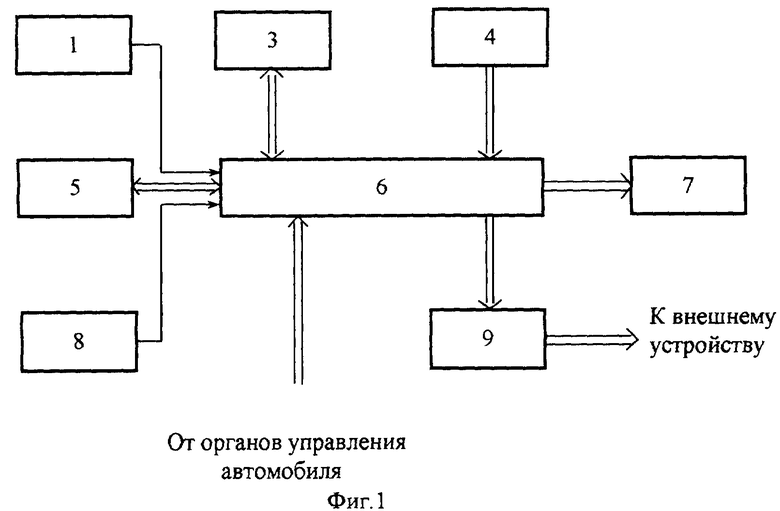
Устройство регистрации для определения причин дорожно-транспортных происшествий (ДТП), содержащее датчик угловой скорости, датчики органов управления, накопитель информации, микропроцессор, контроллер, при этом первый вход/выход микропроцессора соединен с накопителем информации для записи в накопитель и считывания из него сигналов соответствующих датчиков с указанием относительного времени записи, к первому и второму входам микропроцессора подключены соответственно датчики органов управления и датчик угловой скорости, а выход микропроцессора подключен к контроллеру, предназначенному для подключения к его выходу переносного блока памяти, отличающееся тем, что устройство дополнительно содержит таймер реального времени, блок светодиодов, датчик угла наклона, гироскоп, датчики линейных ускорений x, z, переносной блок памяти, второй контроллер, блок регистрации и анализа ДТП, второй выход микропроцессора подключен к блоку светодиодов для осуществления сигнализации о состоянии поверхности дорожного покрытия, к третьему входу микропроцессора подключен таймер реального времени, по сигналам которого осуществляется синхронизация записи информации и работа микропроцессора, а четвертый, пятый, шестой х и седьмой z входы микропроцессора, которые являются входами его аналого-цифровых преобразователей, подключены соответственно к датчику угла наклона, гироскопу и датчикам линейных ускорений х и z, при подключении переносного блока памяти к выходу контроллера вся информация накопителя переписывается в переносной блок памяти, который затем подключается ко входу второго контроллера, выход которого соединен со входом блока регистрации и анализа, где в соответствии с программным обеспечением по информации датчиков осуществляется анализ ДТП, который заключается в выявлении причин их возникновения, причем переносной блок памяти, второй контроллер и блок регистрации и анализа являются достоянием Государственной инспекции безопасности дорожного движения (ГИБДД).
| УСТРОЙСТВО КОНТРОЛЯ ЗА БЕЗОПАСНОСТЬЮ ДВИЖЕНИЯ АВТОМОБИЛЬНОГО ТРАНСПОРТА | 2000 |
|
RU2193233C2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| WO 00/51083 A1, 31.08.2000 | |||
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| ЕР 1324274 А2, 02.07.2003. | |||

