Группа изобретений относится к области создания интеллектуальных транспортных средств и предназначена для контроля параметров движения транспортного средства и построения пространственной траектории движения транспортного средства по зафиксированным данным для анализа причин автодорожного происшествия.
Сбор данных автодорожного происшествия и составление документов на месте происшествия вызывают значительные задержки движения на автодорогах, что создает недопустимые в современных условиях задержки транспортных потоков.
Известен способ восстановления траектории движения транспортного средства при дорожно-транспортном происшествии (ДТП) посредством интегрирования регистрируемых параметров пространственного положения ТС в обратном времени (см. заявку ФРГ №4132981 A1, МКИ G07C 5/08, 06.08.1992 г.).
Указанный способ не позволяет правильно учесть скольжение (юз) ТС после столкновения с другим транспортным средством, т.к. первый аналоговый датчик измеряет только продольную скорость ТС (или проекцию скорости на продольную ось ТС) путем определения скорости вращения заднего колеса ТС, а дополнительная регистрация вторым датчиком поперечного ускорения не учитывает возможный крен ТС, например, из-за наклона дорожного полотна или переворота ТС, что после интегрирования приводит к большим ошибкам в определении истинной траектории движения ТС.
Известна система регистрации функционирования и состояния транспортного средства и условий окружающей среды, реализующая при работе способ, включающий измерение параметров движения транспортного средства (см. патент Великобритании №2268608, МКИ G07C 5/08, 1994 г.).
Это решение не позволяет строить пространственную траекторию транспортного средства и соответственно проводить достоверный анализ дорожно-транспортного происшествия, а его реализация связана с существенными затратами, вызванными необходимостью встраивания датчиков практически во все узлы транспортного средства, что возможно только на заводе-изготовителе или в условиях специализированного автопредприятия.
Известен способ построения пространственной траектории движения транспортного средства по зарегистрированным данным с использованием инерциальных измерительных средств (см. патент России №219389, МКИ B62D 41/00, 2001 г.).
В нем выполняют измерение боковой и вертикальной перегрузок в передней и задней частях транспортного средства с помощью акселерометров, а также продольной и вертикальной перегрузок в передней части транспортного средства на его продольной оси также с помощью акселерометров. Такой способ и устройство для его реализации обладают рядом недостатков.
Во-первых, рассредоточенная по объему транспортного средства система датчиков не позволяет обеспечить их точную ориентацию относительно друг друга. Обеспечение параллельности осей чувствительности акселерометров, разнесенных на расстояние, равное длине транспортного средства, представляет сложную техническую проблему. К тому же жесткость шасси транспортного средства к изгибу оставляет желать лучшего. Непараллельность осей акселерометров, разнесенных в разные части транспортного средства на расстояние Lx и Lz, может достигать нескольких долей угловых градусов, что после двойного интегрирования вызывает большие ошибки восстановления траектории движения транспортного средства, достигающие нескольких метров за каждую секунду движения.
Во-вторых, для надежного восстановления траектории по данным с акселерометров требуется знать достоверно массу каждого транспортного средства и моменты инерции относительно каждой из трех ортогональных осей X, Y и Z, которые сложно измерить, и они могут изменяться непредвиденным образом (например, если посадили в салон еще одного пассажира). Это также приводит к значительным дополнительным ошибкам в определении траектории движения транспортного средства. Для устранения указанных недостатков был предложен способ восстановления скорости и траектории движения в плане как до, так и после ДТП, а также устранение других недостатков аналога, указанных выше.
Известны способ и устройство для восстановления скорости и траектории движения транспортного средства по зарегистрированным данным при дорожно-транспортном происшествии (ДТП), включающие измерение параметров движения, по меньшей мере ускорений, сохранение в запоминающем устройстве результатов измерений с последующим воспроизведением и анализом результатов измерений, дополнительно измеряют текущие значения проекций угловой скорости транспортного средства на три его геометрические взаимно ортогональные оси, а результаты измерений используют для построения траектории в проекции на горизонтальную плоскость по координатам Xм и Yм в местной системе координат как функции времени t, определяемым по соответствующим уравнениям движения транспортного средства в пространстве (см. патент РФ №2232097, МКИ B62D 4/00, 10.07.2004 г.).
Этими способом и устройством достигается некоторое повышение точности восстановления скорости и траектории движения в плане как до, так и после ДТП, а также устранение других недостатков аналога, указанного выше.
Однако данный способ и реализующее его устройство не позволяют в полной мере контролировать параметры пространственного движения автомобиля в предаварийный период, в момент аварии и автоматически и дистанционно выдавать параметры для оценки послеаварийной ситуации с учетом внешних факторов. Дополнительно следует отметить относительную сложность конструкции устройства и значительные габариты.
Техническим результатом предлагаемых технических решений является повышение точности определения траектории в предаварийный период, в момент аварии и расширение функциональных возможностей за счет обеспечения автоматической дистанционной выдачи параметров оценки послеаварийной ситуации с учетом состояния дорожного полотна в процессе движения. Одновременно достигается упрощение конструкции устройства и уменьшаются его габариты.
Данный технический результат достигается тем, что в бортовом устройстве контроля параметров движения транспортного средства при дорожно-транспортном происшествии, содержащем средство измерения параметров движения транспортного средства первичными преобразователями, подключенное к входу микроконтроллера, к выходу которого подключен блок энергонезависимой памяти данных, а так же микросборки сервисной электроники, средство измерения параметров движения транспортного средства первичными преобразователями выполнено в виде бесплатформенного инерциального блока на основе микро- или наноэлектромеханических измерительных преобразователей, ориентированного своими измерительными осями, соответственно, в направлении продольной, поперечной и вертикальной перегрузок транспортного средства, а блок энергонезависимой памяти данных - в виде энергонезависимой флэш-памяти.
Кроме того, в него могут быть введены разъем подключения к бортовой электрической сети, источник бесперебойного питания, резервный аккумулятор, вторичный источник питания, приемник GPS/Глонасс, разъем для подключения антенны GPS/Глонасс, антенна GPS/Глонасс, приемопередатчик GSM, разъем антенны GSM, антенна GSM, USB-разъем, микросборки сервисной электроники содержат информационную шину источника питания, шину питания, информационную шину бесплатформенного инерциального блока, информационную шину GPS/Глонасс, информационную шину GSM, информационную шину флэш-памяти, информационную шину USB-памяти, микроконтроллер содержит контроллер бесплатформенного инерциального блока, контроллер приемника GPS/Глонасс, контроллер мобильной связи (GSM), контроллер флэш-памяти, контроллер USB, подключенные к ним соответствующими упомянутыми шинами сервисной электроники, а также контроллер ввода-вывода, связанный информационной шиной источника питания с источником бесперебойного питания и контроллер питания, связанный шиной питания с вторичным источником питания, бесплатформенным инерциальным блоком на основе микро- или наноэлектромеханических измерительных преобразователей, приемником GPS/Глонасс и приемо-передатчиком GSM, при этом разъем подключения к бортовой электрической сети связан с источником бесперебойного питания, содержащего резервный аккумулятор и подключенного к вторичному источнику питания.
Для способа контроля параметров движения транспортного средства при дорожно-транспортном происшествии, включающим измерение параметров движения, сохранение в запоминающем устройстве результатов измерений с последующим воспроизведением и анализом результатов измерений, указанный технический результат достигается тем, что в качестве измерителя используют бортовое устройство контроля параметров в виде бесплатформенного инерциального блока, при измерении дополнительно контролируют коэффициент сцепления Кс колес ТС с дорожным покрытием, величину nxy и направление ∝xy максимальной перегрузки в момент ДТП, которые определяют при соответствующих допущениях по следующим выражениям:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
где:
i=1÷N;
Кс - коэффициент сцепления колес транспортного средства с дорожным покрытием;
ΔWzi - приращение кажущейся скорости на ось z транспортного средства;
ΔT - такт опроса БИБ;
nxy, αxy - величина максимальной перегрузки и направление действия перегрузки в плоскости x, y;
γ, φ, ϑ - углы разворота транспортного средства вокруг осей x, z и y,
а при анализе результатов учитывают состояние дорожного полотна в процессе движения.
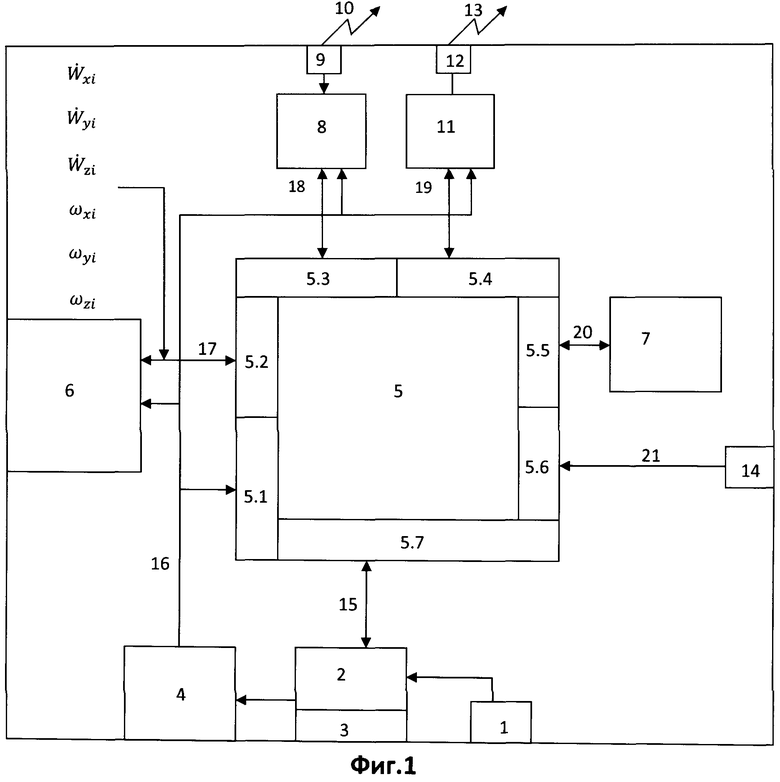
На фиг.1 показана функциональная схема устройства контроля параметров движения транспортного средства.
На фиг.1 приведены следующие обозначения:
1. Разъем подключения к бортовой электрической сети.
2. Источник бесперебойного питания (ИБП).
3. Резервный аккумулятор.
4. Вторичный источник питания (ВИП).
5. Микроконтроллер (МК).
5.1 Контроллер питания.
5.2 Контроллер бесплатформенного инерциального блока (БИБ).
5.3 Контроллер приемника GPS/Глонасс.
5.4 Контроллер мобильной связи (GSM).
5.5 Контроллер флеш-памяти.
5.6 Контроллер USB.
5.7 Контроллер ввода-вывода.
6. Бесплатформенный инерциальный блок на основе микро- или наноэлектромеханических измерительных преобразователей (БИБ).
7. Флэш-память.
8. Приемник GPS/Глонасс.
9. Разъем для подключения антенны GPS/Глонасс.
10. Антенна GPS/Глонасс.
11. Приемо-передатчик GSM.
12. Разъем антенны GSM.
13. Антенна GSM.
14. USB-разъем.
15. Информационная шина источника питания.
16. Шина питания.
17. Информационная шина бесплатформенного инерциального блока.
18. Информационная шина GPS/Глонасс.
19. Информационная шина GSM.
20. Информационная шина флеш-памяти.
21. Информационная шина USB-памяти.
Устройство контроля параметров движения транспортного средства (УКПД ТС), представленное на фиг.1, состоит из разъема подключения к бортовой электрической сети 1, источника бесперебойного питания 2 с резервным аккумулятором 3, вторичного источника питания 4, микроконтроллера 5, бесплатформенного инерциального блока на основе микро- или наномеханических акселерометров и гироскопов 6, флеш-памяти 7, приемника GPS/Глонасс 8 с разъемом для подключения 9 антенны GPS/Глонасс 10, приемопередатчика GSM 11 с разъемом 12 для подключения антенны GSM 13, разъема USB 14, информационной шины питания 15, шины питания 16, информационной шины бесплатформенного инерциального блока 17, информационной шины GPS/Глонасс 18, информационной шины GSM 19, информационной шины флеш-памяти 20 и информационной шины USB-порта 21. Бесплатформенный инерциальный блок на основе микро- или наномеханических акселерометров и гироскопов (БИБ) 6 может быть выполнен, например, в виде бесплатформенного инерциального измерительного блока по патенту РФ №2162203, содержащего микромеханические вибрационные гироскопы-акселерометры с электродами возбуждения колебаний и съема информации с чувствительных элементов, размещенные на основании, закрепленном на подложке, на которой установлены микросборки сервисной электроники, отличающийся тем, что подложка выполнена в виде платы из диэлектрика, а основание - в виде правильной шестиугольной усеченной пирамиды, по меньшей мере на трех боковых гранях которой размещены чувствительные элементы микромеханических вибрационных гироскопов-акселерометров, при этом основание по плоскости большей торцевой грани закреплено в центральной части подложки, а микросборки сервисной электроники установлены вокруг основания по периферии подложки и выполнены по тонкопленочной технологии. Подложка размещена в защитном корпусе с двусторонней разводкой выводов микросборок сервисной электроники в плоскости, параллельной плоскости большей торцевой грани основания.
Напряжение бортовой электрической сети через разъем подключения к бортовой электрической сети 1 поступает на источник бесперебойного питания 2 с резервным аккумулятором 3. Далее это напряжение поступает на вторичный источник питания 4, преобразуется в напряжение питания +5 B. Напряжение питания 5 B через шину питания 16 поступает на БИБ 6, на микроконтроллер 5, флеш-память 7, на приемник GPS/Глонасс 8 и приемо-передатчик GSM 11.
Информация с БИБ в кодированном виде цифровых значений линейных ускорений  и угловых скоростей (ωxi, ωyi, ωzi) по информационной шине БИБ 17 поступает через контроллер БИБ 5.2 микроконтроллеров и информационную шину 20 во флеш-память 7 и одновременно в информационную шину 19 на приемо-передатчик 11, который через разъем 12 и антенну 13 передает непрерывно на диспетчерский пункт. Одновременно, информация о текущем географическом положении и о времени поступает с GPS/Глонасс приемника 8 по шине 18 в контроллер 5 и через информационные шины флеш-памяти 20 в флеш-память 7 и приемо-передатчик 11.
и угловых скоростей (ωxi, ωyi, ωzi) по информационной шине БИБ 17 поступает через контроллер БИБ 5.2 микроконтроллеров и информационную шину 20 во флеш-память 7 и одновременно в информационную шину 19 на приемо-передатчик 11, который через разъем 12 и антенну 13 передает непрерывно на диспетчерский пункт. Одновременно, информация о текущем географическом положении и о времени поступает с GPS/Глонасс приемника 8 по шине 18 в контроллер 5 и через информационные шины флеш-памяти 20 в флеш-память 7 и приемо-передатчик 11.
Информация от ИБП 2 поступает на порт 5.7 микроконтроллера 5 по информационной шине 15. Источник бесперебойного питания 2 на основе резервного аккумулятора 3 предназначен для полноценного завершения работы УКПД ТС при потере бортового питания. Во время работы УКПД ТС с обеспечением питания от бортовой сети транспортного средства происходит подзарядка аккумулятора 3.
Разъем USB 14 предназначен для подключения и считывания информации на ноутбук для последующей обработки и уточнения причин аварии.
При этом в процессе движения непрерывно передается на диспетчерский пункт и записывается во флеш-память циклически, последовательно обновляясь в течение нескольких часов, следующая информация:
ωxi - проекция угловой скорости на продольную ось транспортного средства;
ωyi - проекция угловой скорости на поперечную ось ТС;
ωzi - проекция угловой скорости на вертикальную ось ТС;
 - проекция линейного ускорения (перегрузки) на продольную ось ТС;
- проекция линейного ускорения (перегрузки) на продольную ось ТС;
 - проекция линейного ускорения на поперечную ось ТС;
- проекция линейного ускорения на поперечную ось ТС;
 - проекция линейного ускорения на вертикальную ось ТС;
- проекция линейного ускорения на вертикальную ось ТС;
X, Y - координаты ТС в географической системе координат;
 - путевая скорость;
- путевая скорость;
λ - путевой угол.
Перечень измеряемых параметров позволяет определять не только траекторию в процессе движения и аварийной ситуации, но и контролировать коэффициент сцепления Кс колес ТС с дорожным покрытием, величину nxy и ∝xy направление максимальной перегрузки в момент ДТП, т.е. обеспечить повышение точности определения траектории в предаварийный период, в момент аварии и расширение функциональных возможностей за счет обеспечения автоматической дистанционной выдачи параметров оценки послеаварийной ситуации с учетом состояния дорожного полотна в процессе движения. Учитывать состояние дорожного полотна в процессе движения (выбоины и т.д.), следует производя расчет в микроконтроллере, по следующим выражениям при соответствующих допущениях:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
где:
i=1÷N
Кс - коэффициент сцепления колес транспортного средства с дорожным покрытием;
ΔWzi - приращение кажущейся скорости на ось z транспортного средства;
ΔT - такт опроса БИБ;
nxy, αxy - величина максимальной перегрузки и направление действия перегрузки в плоскости x, y;
γ, φ, ϑ - углы разворота транспортного средства вокруг осей x, z и y.
Предлагаемыми техническими решениями достигается технический результат, которым является повышение точности определения траектории в предаварийный период, в момент аварии и расширение функциональных возможностей за счет обеспечения автоматической дистанционной выдачи параметров оценки послеаварийной ситуации с учетом состояния дорожного полотна в процессе движения. Одновременно достигается упрощение конструкции устройства и уменьшаются его габариты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВЕСА ГРУЗА И КОНТРОЛЯ ЗАГРУЗКИ ТРАНСПОРТНОГО СРЕДСТВА И БОРТОВАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445586C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ УНИФИЦИРОВАННЫХ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ АКСЕЛЕРОМЕТРОВ И ГИРОСКОПОВ И АВТОМАТИЗИРОВАННЫЙ СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381511C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА И СПОСОБ ОПРЕДЕЛЕНИЯ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ | 2011 |
|
RU2486467C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ, ТЕРМОЭЛЕКТРОННОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ С АВТОЭЛЕКТРОННОЙ ЭМИССИЕЙ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2010 |
|
RU2447411C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ | 2008 |
|
RU2381447C1 |
| Способ экстренного оповещения при опасных ситуациях и авариях на дорогах | 2019 |
|
RU2728951C1 |
| ВИДЕО КОНТРОЛЬ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ | 2012 |
|
RU2587408C2 |
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
Группа изобретений относится к области контроля движения транспортного средства (ТС) с целью построения пространственной траектории его движения по зафиксированным данным для анализа причин дорожно-транспортного происшествия (ДТП). Устройство контроля параметров движения содержит средство измерения параметров движения ТС первичными преобразователями, подключенное к входу микроконтроллера. К выходу микроконтроллера подключен блок энергонезависимой памяти данных, а также микросборки сервисной электроники. Средство измерения параметров движения ТС выполнено в виде бесплатформенного инерциального блока на основе микро- или наноэлектромеханических измерительных преобразователей, ориентированного своими измерительными осями, соответственно, в направлении продольной, поперечной и вертикальной перегрузок ТС. Блок энергонезависимой памяти данных выполнен в виде энергонезависимой флэш-памяти. Способ контроля параметров движения включает измерение параметров движения бесплатформенным инерциальным блоком и сохранение результатов измерений с их последующим воспроизведением и анализом. Дополнительно контролируют коэффициент сцепления колес ТС с дорожным покрытием, величину и направление максимальной перегрузки в момент ДТП, а при анализе результатов учитывают состояние дорожного полотна в процессе движения. Группа изобретений повышает точность определения траектории в предаварийный период и обеспечивает автоматическую дистанционную выдачу параметров оценки послеаварийной ситуации с учетом состояния дорожного полотна в процессе движения. 2 н. и 1 з.п. ф-лы. 1 ил.
1. Бортовое устройство контроля параметров движения транспортного средства при дорожно-транспортном происшествии, содержащее средство измерения параметров движения транспортного средства первичными преобразователями, подключенное к входу микроконтроллера, к выходу которого подключен блок энергонезависимой памяти данных, а также микросборки сервисной электроники, отличающееся тем, что средство измерения параметров движения транспортного средства первичными преобразователями выполнено в виде бесплатформенного инерциального блока на основе микро- или наноэлектромеханических измерительных преобразователей, ориентированного своими измерительными осями соответственно в направлении продольной, поперечной и вертикальной перегрузок транспортного средства, а блок энергонезависимой памяти данных - в виде энергонезависимой флэш-памяти.
2. Устройство по п.1, отличающееся тем, что в него введены разъем подключения к бортовой электрической сети, источник бесперебойного питания, резервный аккумулятор, вторичный источник питания, приемник GPS/Глонасс, разъем для подключения антенны GPS/Глонасс, антенна GPS/Глонасс, приемопередатчик GSM, разъем антенны GSM, антенна GSM, USB-разъем, микросборки сервисной электроники содержат информационную шину источника питания, шину питания, информационную шину бесплатформенного инерциального блока, информационную шину GPS/Глонасс, информационную шину GSM, информационную шину флэш-памяти, информационную шину USB-памяти, микроконтроллер содержит контроллер бесплатформенного инерциального блока, контроллер приемника GPS/Глонасс, контроллер мобильной связи (GSM), контроллер флэш-памяти, контроллер USB, подключенные к ним соответствующими упомянутыми шинами сервисной электроники, а также контроллер ввода-вывода, связанный информационной шиной источника питания с источником бесперебойного питания, и контроллер питания, связанный шиной питания с вторичным источником питания, бесплатформенным инерциальным блоком на основе микро- или наноэлектромеханических измерительных преобразователей, приемником GPS/Глонасс и приемопередатчиком GSM, при этом разъем подключения к бортовой электрической сети связан с источником бесперебойного питания, содержащего резервный аккумулятор и подключенного к вторичному источнику питания.
3. Способ контроля параметров движения транспортного средства при дорожно-транспортном происшествии, включающий измерение параметров движения, сохранение в запоминающем устройстве результатов измерений с последующим воспроизведением и анализом результатов измерений, отличающийся тем, что в качестве измерителя используют бортовое устройство контроля параметров в виде бесплатформенного инерциального блока, при измерении дополнительно контролируют коэффициент сцепления Кс колес ТС с дорожным покрытием, величину nxy и направление αху максимальной перегрузки в момент ДТП, которые определяют при соответствующих допущениях по следующим выражениям:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
где i=1÷N;
Kc - коэффициент сцепления колес транспортного средства с дорожным покрытием;
ΔWzi - приращение кажущейся скорости на ось z транспортного средства;
ΔT - такт опроса БИБ;
nxy, αху - величина максимальной перегрузки и направление действия перегрузки в плоскости х, у;
γ, φ, ϑ - углы разворота транспортного средства вокруг осей х, z и у,
а при анализе результатов учитывают состояние дорожного полотна в процессе движения.
| СПОСОБ ВОССТАНОВЛЕНИЯ СКОРОСТИ И ТРАЕКТОРИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПО ЗАРЕГИСТРИРОВАННЫМ ДАННЫМ ПРИ ДОРОЖНО-ТРАНСПОРТНОМ ПРОИСШЕСТВИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2232097C1 |
| US 2008249680 А1, 09.10.2008 | |||
| WO 2009074503 A1, 18.06.2009 | |||
| 0 |
|
SU193210A1 | |

