Изобретение относится к приборотехническим испытаниям, используется для оценки состояния поверхности взлетно-посадочной полосы аэродрома, но также может использоваться для определения коэффициента сцепления дорожных покрытий.
Известен способ оценки состояния взлетно-посадочной полосы с использованием транспортных средств. Эффективность торможения определяют обработкой результатов измерения расстояния или времени торможения до остановки грузового или легкового автомобиля, двигающегося с заданной скоростью, при торможении, обеспечивающем полный юз колес. По результатам измерений вычисляют коэффициент сцепления.
Недостатком этого способа является то, что из-за большого количества исходных параметров математической модели процесса торможения, каждый из которых измеряют с различной точностью, суммарная погрешность определения коэффициента сцепления достигает значительной величины (Руководство по эксплуатации гражданских аэродромов Российской Федерации, приложение 6).
Близким по технической сущности к предлагаемому способу является "Способ определения коэффициента сцепления колес транспортного средства с дорожным покрытием при торможении в режиме автоблокировки" (Патент РФ №2006397).
Данный известный способ реализуют следующим образом. Измерительное колесо вводят в контакт с поверхностью дорожного покрытия. Нагружают нормальной силой. Катят по поверхности дорожного покрытия с заданной степенью проскальзывания, которую создают путем присоединения к колесу генератора постоянного тока независимого возбуждения, который можно вводить в тормозной или двигательный режимы, путем изменения тока якоря генератора. Сигналы электронных датчиков нормальной нагрузки и горизонтальной нагрузки (тормозной силы измерительного колеса) поступают в электрический прибор - логометр. Логометр используется для регистрации отношения сигналов указанных датчиков. Отношение тормозного усилия на измерительном колесе к нормальной силе давления измерительного колеса на дорожное покрытие равно коэффициенту сцепления колеса транспортного средства с поверхностью дорожного покрытия. Недостатком известного способа является то, что измерения, осуществляемые при заданной степени проскальзывания измерительного колеса, уменьшают максимальное тормозное усилие между измерительным колесом и поверхностью покрытия, соответственно ухудшая точность определения коэффициента сцепления.
Наиболее близким к заявленному способу по технической сущности является "Способ определения коэффициента сцепления колеса с аэродромным покрытием" - патент Российской Федерации №2298166, G01N 19/02. Известный способ определения коэффициента сцепления имеет наибольшее количество сходных существенных признаков с признаками заявленного способа, поэтому указанный способ принят за прототип. Способ определения коэффициента сцепления в прототипе реализован следующим образом.
Процесс определения коэффициента сцепления условно делится на два этапа: поиска и слежения.
В режиме поиска определяют начало пробуксовки измерительного колеса, когда ток активной нагрузки равномерно увеличивают, при этом сила динамического торможения измерительного колеса будет также пропорционально расти. Пробуксовку измерительного колеса определяют по скорости вращения датчиков угловых скоростей, установленных на измерительном и ведомом колесах. С появлением пробуксовки измерительного колеса появляется разность в показаниях датчиков угловых скоростей. При фиксации начала пробуксовки режим поиска заканчивается.
В режиме слежения обеспечивают постоянное отслеживание начала пробуксовки измерительного колеса, при этом информация датчиков угловых скоростей поступает в вычислитель, где их показания сравниваются.
Пробуксовка измерительного колеса отсутствует - показания датчиков угловых скоростей равны. В вычислителе формируется сигнал увеличения нагрузки на генератор. С увеличением нагрузки на генераторе увеличивается сила динамического торможения измерительного колеса, с появлением пробуксовки которого увеличение нагрузки на генераторе прекращается.
Если пробуксовка измерительного колеса больше заданной величины, тогда уменьшают нагрузку на генератор, соответственно уменьшается сила динамического торможения измерительного колеса, уменьшается его пробуксовка. При достижении заданной величины пробуксовки нагрузка на генераторе сохраняется.
В соответствии с программным обеспечением вычислителем обеспечивают заданный минимальный диапазон пробуксовки измерительного колеса, в пределах которого определяют силу сцепления измерительного колеса с поверхностью аэродромного покрытия. Коэффициент сцепления определяют как отношение силы сцепления измерительного колеса к нормальной силе давления измерительного колеса на поверхность покрытия. Для вычисления максимального значения коэффициента сцепления вычисленное значение коэффициента сцепления умножают на коэффициент динамического торможения, который определяют при тарировании устройства.
Недостаток известного способа-прототипа заключается в следующем. Сила сцепления Рсцп измерительного колеса с поверхностью покрытия определяют по информации датчиков угловой скорости в момент начала его пробуксовки, что понижает точность определения коэффициента сцепления.
Целью предлагаемого способа является повышение точности измерения коэффициента сцепления колеса с поверхностью покрытия.
Решение поставленной цели в "Способе определения коэффициента сцепления колеса с поверхностью аэродромного покрытия" достигается тем, что в нем, как в прототипе, коэффициент сцепления колеса с поверхностью аэродромного покрытия определяется методом динамического торможения, когда электродвигатель работает в генераторном режиме, при котором механическая энергия тормозного элемента (измерительного колеса) превращается в электрическую и выделяется в форме тепловой энергии в активной нагрузке. При этом определяют нормальную силу нагрузки Р измерительного колеса на поверхность покрытия.
В заявленном способе дополнительно определяют, затем постоянно поддерживают равенство момента силы торможения Мтор., создаваемой динамическим торможением, и момента силы сцепления Мсцп измерительного колеса с поверхностью аэродромного покрытия (Мтор.=Мсцп). При этом максимальное тормозное усилие Ртор.макс, которое получают на измерительном колесе, равно силе сцепления Рсцп измерительного колеса с поверхностью покрытия (Ртор.макс=Рсцп, Ртор.макс=Р Ксцп). Коэффициент сцепления рассчитывают по формулам:
Мсцп=РсцпR; Рсцп=Мсцп/R; Ксцп=Рсцп/Р;
где Ксцп - коэффициент сцепления измерительного колеса с аэродромным покрытием;
Мтор. - момент силы торможения, создаваемый динамическим торможением, Н·м;
Мсцп - момент силы сцепления измерительного колеса с поверхностью покрытия, Н·м;
Р - нормальная нагрузка измерительного колеса на поверхность покрытия, Н;
Рсцп - сила сцепления измерительного колеса с поверхностью покрытия, Н;
Ртор.макс - максимальное тормозное усилие между измерительным колесом и поверхностью аэродромного покрытия Н;
R - радиус измерительного колеса, м.
В известных технических решениях признаков, сходных с отличительными признаками заявленного способа, не обнаружено, вследствие чего можно считать, что предлагаемый способ соответствует изобретательскому уровню.
Использование данного способа при его реализации позволит повысить безопасность при посадке летательных аппаратов путем повышения точности определения коэффициента сцепления авиашасси с поверхностью взлетно-посадочной полосы аэродрома.
Сущность предлагаемого способа определения коэффициента сцепления с поверхностью аэродромного покрытия поясняется чертежами, где представлены:
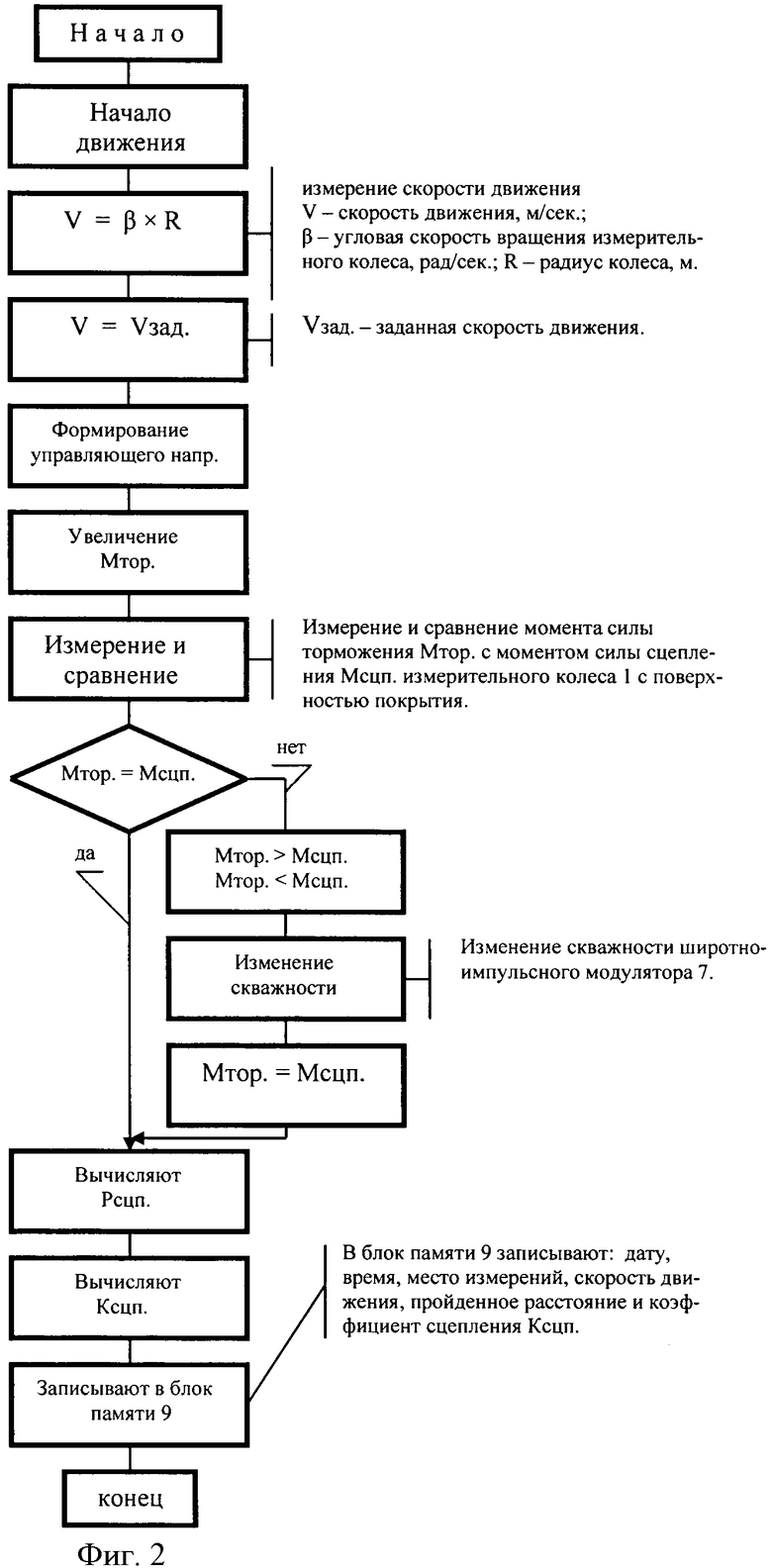
на фиг.1 - структурная схема устройства, реализующая предложенный способ определения коэффициента сцепления;
на фиг.2 - алгоритм реализации предложенного способа определения коэффициента сцепления.
В предлагаемом способе определения коэффициент сцепления колеса с поверхностью аэродромного покрытия, как и в прототипе, коэффициент сцепления колеса с поверхностью аэродромного покрытия определяют методом динамического торможения, когда электродвигатель работает в генераторном режиме, при котором механическая энергия тормозного элемента (измерительного колеса) превращается в электрическую и выделяется в форме тепловой энергии в активной нагрузке. При этом определяют нормальную силу нагрузки Р измерительного колеса на поверхность покрытия.
В заявленном способе дополнительно определяют, затем постоянно поддерживают равенство момента силы торможения Мтор., создаваемой динамическим торможением, и момента силы сцепления Мсцп измерительного колеса с поверхностью аэродромного покрытия (Мтор.=Мсцп), при этом максимальное тормозное усилие Ртор.макс, которое получают на измерительном колесе, равно силе сцепления Рсцп измерительного колеса с поверхностью покрытия (Ртор.макс=Рсцп, Ртор.макс=Р Ксцп). Коэффициент сцепления рассчитывают по формулам:
Мсцп=РсцпR; Рсцп=Мсцп/R; Ксцп=Рсцп/Р;
где Ксцп - коэффициент сцепления измерительного колеса с аэродромным покрытием;
Мтор. - момент силы торможения, создаваемый динамическим торможением, Н·м;
Мсцп - момент силы сцепления измерительного колеса с поверхностью покрытия, Н·м;
Р - нормальная нагрузка измерительного колеса на поверхность покрытия, Н;
Рсцп- сила сцепления измерительного колеса с поверхностью покрытия, Н;
Ртор.макс - максимальное тормозное усилие между измерительным колесом и поверхностью аэродромного покрытия Н;
R - радиус измерительного колеса, м.
Для реализации предложенного способа используется устройство, структурная схема которого приведена на фиг.1. Устройство содержит: измерительное колесо 1, первый и второй датчики крутящего момента 2 и 3, редуктор 4, генератор постоянного тока с регулятором напряжения 5, микроконтроллер 6, блок активной нагрузки 7, блок широтно-импульсной модуляции 8, блок памяти 9. Измерительное колесо 1 механически соединено с первым датчиком крутящего момента 2, который через редуктор 4 соединен с якорем генератора постоянного тока 5. Выход генератора постоянного тока 5 через блок активной нагрузки 7 подключен к первому входу блока широтно-импульсной модуляции 8. Второй вход блока широтно-импульсной модуляции 8 подключают к выходу генератора постоянного тока 5. На диск измерительного колеса 1 устанавливают второй датчик 3 крутящего момента, первый и второй выходы которого подключены соответственно к первому и второму входам микроконтроллера 6, к третьему входу которого подключен выход первого 2 датчика крутящего момента. Первый и второй выходы микроконтроллера 6 подключены соответственно к третьему входу блока широтно-импульсной модуляции 8 и входу блока памяти 9. Свободный выход микроконтроллера 6 является входом подключения внешних устройств.
Вес конструкции измерительного устройства и элементов измерения составляют нормальную силу Р нагрузки измерительного колеса на поверхность покрытия.
При определении коэффициента сцепления поверхности аэродромного покрытия в качестве измерительного колеса 1 используется авиационное шасси, а при оценке состояния дорожного покрытия - автомобильное шасси.
Первый 2 датчик крутящего момента измеряет момент силы торможения измерительного колеса 1. Датчик 2 содержит измерительный вал с прецизионными тензорезисторами. Крутящий момент, приложенный между концами вала (между измерительным колесом 1 и якорем генератора постоянного тока 5), создает механическую деформацию, которая измеряется мостовой тензометрической системой. Выходной сигнал, пропорциональный прикладываемому крутящему моменту, поступает на вход микроконтроллера 6.
Второй 3 датчик крутящего момента измеряет момент силы сцепления измерительного колеса 1 с поверхностью покрытия. Датчик 3 крутящего момента снабжен тензорезисторными преобразователями измерения момента силы, датчиком частоты вращения и системой передачи информации на первый и второй входы микроконтроллера 6. Датчик 3 устанавливают на диск измерительного колеса 1.
Редуктор 4 обеспечивает передаточное отношение между измерительным колесом и якорем генератора постоянного тока, при котором осуществляют вращение якоря генератора постоянного тока в пределах номинальной скорости вращения при заданной скорости движения измерительного устройства.
Генератор постоянного тока 5 осуществляет динамическое торможение измерительного колеса 1. В состав генератора 5 входят: синхронный генератор со встроенным выпрямителем и регулятор напряжения, обеспечивающий стабилизацию выходного напряжения.
Микроконтроллер 6 выполнен на микросхеме, которая выпускается с программируемой памятью программ, оперативным запоминающим устройством, 10-разрядными аналого-цифровыми преобразователями, 16-разрядными таймерами, встроенными интерфейсами, таймером реального времени и входами и выходами для ввода и вывода информации.
Блок широтно-импульсной модуляции 8 осуществляет регулировку мощности в блоке активной нагрузки 7. Широтно-импульсный модулятор 8 формирует импульсный сигнал постоянной частоты с переменной скважностью. При изменении скважности меняется среднее напряжение в блоке активной нагрузки 7. Широтно-импульсный модулятор собран по типовой схеме и содержит: электронный ключ, дравер и транзистор. Электронный ключ работает в импульсном режиме (открыт - закрыт), в цепь электронного ключа включен блок активной нагрузки 7. Для управления работой электронного ключа используют опорное напряжение, поступающее с выхода генератора постоянного тока. Дравер осуществляет формирование импульсов с постоянной частотой и переменной скважностью, а также управляет работой электронного ключа. Транзистор управляет скважностью в соответствии с управляющим напряжением, поступающим с выхода микроконтроллера 6.
Блок памяти 9 выполнен на микросхеме энергонезависимой памяти. В блок памяти 9 записывается дата, время, место проведения измерений, скорость движения, измеренное расстояние и отображение состояния поверхности - коэффициент сцепления Ксцп. При необходимости блок памяти 9 снимается с устройства и подключается к входу персонального компьютера, для более детального анализа проведенных измерений.
Реализация заявленного способа определения коэффициента сцепления колеса с поверхностью аэродромного покрытия (фиг.2)
Автомобиль-буксировщик набирает скорость. С второго 3 датчика крутящего момент, с его второго выхода, в микроконтроллер 6 поступает сигнал, соответствующий угловой скорости вращения измерительного колеса 1. Скорость движения устройства определяют по формуле V=β×R, где V - скорость движения, м/с; β - угловая скорость вращения измерительного колеса 1, рад/с; R - радиус измерительного колеса, м. При достижении заданной скорости движения динамическое торможение измерительного колеса 1 плавно увеличивается. Одновременно осуществляют измерение и сравнение момента силы динамического торможения Мтор. с моментом силы сцепления Мсцп измерительного колеса 1 с поверхностью покрытия. Управление моментом силы торможения Мтор. осуществляют широтно-импульсным модулятором 8. Информация первого 2 и второго 3 датчиков крутящего момента (Мтор. и Мсцп) поступает в микроконтроллер 6, где показания датчиков сравниваются. При сравнении информации датчиков формируется управляющее напряжение, которое поступает в блок широтно-импульсной модуляции 8. В соответствии с управляющим напряжением меняется скважность широтно-импульсного модулятора 8. При изменении скважности плавно меняется среднее напряжение на активной нагрузке 7, соответственно плавно меняется момент силы торможения Мтор. на выходе второго 2 датчика крутящего момента. Увеличение или уменьшение момента силы торможения Мтор. продолжается до момента, когда момент силы торможения Мтор. станет равен моменту силы сцепления Мсцп измерительного колеса 1 с поверхностью покрытия. При этом регистрируется максимальное тормозное усилие Ртор.макс между измерительным колесом 1 и поверхностью покрытия и максимальное тормозное усилие Ртор.макс равно силе сцепления Рсцп измерительного колеса 1 с поверхностью покрытия (Ртор.макс=Рсцп).
В дальнейшем осуществляют слежение за равенством момента силы торможения Мтор. моменту силы сцепления Мсцп измерительного колеса 1, при их равенстве (Мтор.=Мсцп) вычисляют коэффициент сцепления Ксцп.
Рсцп=Мсцп/R; Ксцп=Рсцп/Р;
где Рсцп - сила сцепления измерительного колеса 1 с поверхностью покрытия, Н;
Мсцп - момент силы сцепления измерительного колеса с поверхностью покрытия, Н·м;
R - радиус измерительного колеса, м;
Ксцп - коэффициент сцепления.
Смачивание поверхности перед проведением измерений не требуется. Определение коэффициента сцепления осуществляется в любое время года.
Р - нормальная сила нагрузки измерительного колеса на поверхность покрытия, Н.
Положительный эффект от реализации предложенного способа определения коэффициента сцепления заключается в том, что коэффициент сцепления вычисляют в момент равенства момента силы торможения Мтор. моменту силы сцепления Мсцп измерительного колеса с поверхностью покрытия, когда тормозное усилие между измерительным колесом 1 и поверхностью покрытия приобретает максимальное значение Ртор.макс. При этом максимальное тормозное усилие Ртор.макс равно силе сцепления Рсцп измерительного колеса 1 с поверхностью покрытия (Ртор.макс=Рсцп). Вычисление коэффициента сцепления при максимальном тормозном усилии Ртор.макс повышает его точность.
Использование широтно-импульсного модулятора 8 позволяет плавно менять среднее значение напряжения в блоке активной нагрузки и соответственно точнее определять равенство момента силы торможения Мтор. и момента силы сцепления Мсцп.
Все это повышает точность определения коэффициента сцепления колеса с поверхностью аэродромного покрытия и, как следствие, повышает безопасность при взлете и посадке летательных аппаратов.
Заявленный способ определения коэффициента сцепления может быть выполнен на следующих элементах:
- измерительное колесо 1 - автомобильное или авиационное шасси;
- первый 2 датчик крутящего момента - бесконтактный датчик крутящего момента, модель 8651;
- второй 3 датчик крутящего момента - датчик крутящего момента М28;
- генератор постоянного тока 5 - малогабаритный генератор ВГ - 8К1;
- микроконтроллер 6 - микроконтроллер семейства PIC 18;
- блок памяти 9 - микросхема энергонезависимой памяти;
- широтно-импульсный модулятор 8 содержит: электронный ключ, дравер и транзистор.
Изобретение относится к приборотехническим испытаниям. Техническим результатом является повышение точности измерения коэффициента сцепления колеса с поверхностью покрытия. Способ определения коэффициента сцепления колеса с поверхностью аэродромного покрытия методом динамического торможения заключается в том, что электродвигатель работает в генераторном режиме, при котором механическая энергия тормозного элемента (измерительного колеса) превращается в электрическую и выделяется в форме тепловой энергии в активной нагрузке, при этом определяют нормальную силу нагрузки Р измерительного колеса на поверхности покрытия, дополнительно определяют момент силы торможения Мтор., создаваемый динамическим торможением, и момент силы сцепления Мсцп измерительного колеса с поверхностью аэродромного покрытия, а затем постоянно поддерживают равенство момента силы торможения Мтор. и момента силы сцепления Мсцп (Мтор.=Мсцп), при этом максимальное тормозное усилие Ртор.макс, которое получают на измерительном колесе, равно силе сцепления Рсцп измерительного колеса с поверхностью покрытия (Ртор.макс=Рсцп, Ртор.макс=PКсцп); коэффициент сцепления рассчитывают по формулам: Мcцп=РcцпR; Рcцп=Мcцп/R; Ксцп=Pсцп/P; где Ксцп - коэффициент сцепления измерительного колеса с аэродромным покрытием; Мтор. - момент силы торможения, создаваемый динамическим торможением, Н·м; Мcцп - момент силы сцепления измерительного колеса с поверхностью покрытия, Н·м; Р - нормальная нагрузка измерительного колеса на поверхность покрытия, Н; Рсцп - сила сцепления измерительного колеса с поверхностью покрытия, Н; Ртор.макс - максимальное тормозное усилие между измерительным колесом и поверхностью покрытия, Н; R - радиус измерительного колеса, м. 2 ил.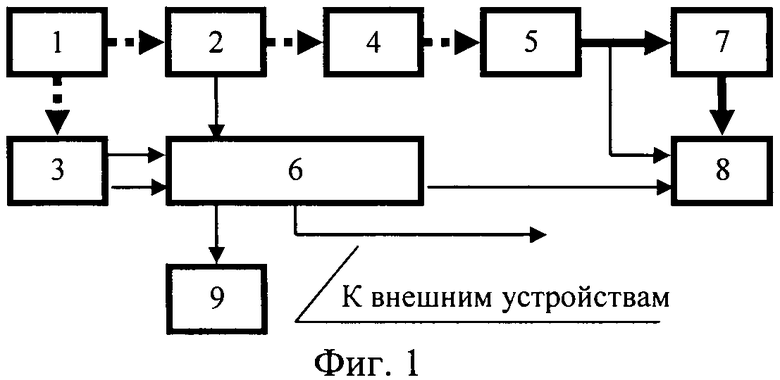
Способ определения коэффициента сцепления колеса с поверхностью аэродромного покрытия методом динамического торможения, когда электродвигатель работает в генераторном режиме, при котором механическая энергия тормозного элемента (измерительного колеса) превращается в электрическую и выделяется в форме тепловой энергии в активной нагрузке, при этом определяют нормальную силу нагрузки Р измерительного колеса на поверхности покрытия, отличающийся тем, что дополнительно определяют момент силы торможения Мтор, создаваемый динамическим торможением, и момент силы сцепления Мсцп измерительного колеса с поверхностью аэродромного покрытия, а затем постоянно поддерживают равенство момента силы торможения Мтор и момент силы сцепления Мсцп, (Мтор=Мсцп), при этом максимальное тормозное усилие Ртор.макс, которое получают на измерительном колесе, равно силе сцепления Рсцп измерительного колеса с поверхностью покрытия (Ртор.макс=Рсцп, Ртор.макс=Р Ксцп); коэффициент сцепления рассчитывают по формулам:
Mсцп=PсцпR; Pсцп=Mсцп/R; Kсцп=Pсцп/P;
где Ксцп - коэффициент сцепления измерительного колеса с аэродромным покрытием;
Мтор - момент силы торможения, создаваемый динамическим торможением, Нм;
Мсцп - момент силы сцепления измерительного колеса с поверхностью покрытия, Нм;
Р - нормальная нагрузка измерительного колеса на поверхность покрытия, Н;
Рсцп - сила сцепления измерительного колеса с поверхностью покрытия, Н;
Ртор.макс - максимальное тормозное усилие между измерительным колесом и поверхностью покрытия, Н;
R - радиус измерительного колеса, м.
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С АЭРОДРОМНЫМ ПОКРЫТИЕМ | 2005 |
|
RU2298166C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ ИЗМЕРИТЕЛЬНОГО КОЛЕСА С ПОВЕРХНОСТЬЮ ИСКУССТВЕННОГО ПОКРЫТИЯ | 2007 |
|
RU2348027C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА С ДОРОЖНЫМ ПОКРЫТИЕМ ПРИ ТОРМОЖЕНИИ В РЕЖИМЕ АНТИБЛОКИРОВКИ | 1991 |
|
RU2006397C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА, ИМЕЮЩЕГО ПОСТОЯННУЮ СТЕПЕНЬ СКОЛЬЖЕНИЯ, С ПОВЕРХНОСТЬЮ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2000 |
|
RU2165610C1 |
| DE 3939917 A1, 06.06.1991. | |||

