Изобретение относится к контрольно-измерительной технике и может быть использовано в системах автоматического управления и контроля различных объектов повышенного быстродействия.
Известно устройство [1], которое осуществляет контроль частоты вращения и в состав которого входят по три датчика частоты вращения, счетчика, триггера, мажоритарных элемента, элемента задержки, задатчика предельных значений угловой скорости, а также формирователь выходных команд. В устройстве предусмотрено резервирование его схемных элементов.
Первым существенным недостатком этого устройства является его низкая помехоустойчивость, поскольку резервирование элементов не защищает устройство от помех, которые могут возникнуть одновременно в цепях трех датчиков частоты вращения.
Вторым существенным недостатком рассматриваемого устройства является отсутствие возможности установки оптимального значения порога срабатывания, обеспечивающего максимальную помехоустойчивость при работе устройства в заданном диапазоне амплитуды сигналов датчика частоты вращения. В этом устройстве сигналы датчиков частоты вращения подаются непосредственно на входы счетчиков, порог срабатывания которых имеет фиксированное относительно высокое значение.
Оба эти недостатка приводят к понижению надежности устройства при работе в условиях помех, которые могут возникнуть в цепях датчиков частоты вращения.
Наиболее близким по технической сущности - прототипом - является устройство, приведенное в [2]. В состав этого устройства входят датчик частоты вращения, формирователь импульсов, блок измерения, блок анализа информации и источник напряжения постоянного тока, обеспечивающий питание устройства, причем выход блока измерения подключен через блок анализа информации к выходу устройства.
В этом устройстве блок измерения состоит из блока управления, генератора опорной частоты и счетчика, а блок анализа информации включает в себя блок начальной установки, дешифратор, формирователь выходных команд, четыре D-триггера, четыре элемента ИЛИ, три пороговых накопителя и шесть элементов И.
Приемная часть устройства, в данном случае представляющая собой формирователь импульсов, преобразующий сигналы датчика частоты вращения в импульсы, не имеет эффективной защиты от помех, возникающих в датчиковых цепях. Такая защита в рассматриваемом устройстве построена на анализе последствий воздействия помех, то есть на анализе информации о длительности периода следования сигналов датчика частоты вращения и сигналов помех, полученной в блоке измерения.
Первым существенным недостатком этого устройства является то, что при воздействии помех оно имеет низкую надежность контроля, поскольку в этих условиях в нем производится блокировка выходных команд и по сути дела контроль частоты вращения отсутствует.
Вторым существенным недостатком рассматриваемого устройства, как и устройства [1], является отсутствие возможности установки оптимального значения порога срабатывания формирователя импульсов, что также приводит к понижению надежности контроля частоты вращения в условиях воздействия помех. В этом устройстве сигналы датчика частоты вращения подаются на формирователь импульсов, имеющий фиксированный порог срабатывания. Так, например, в случае применения в качестве формирователя импульсов микросхемы 522КН2Б бКО.347.122 ТУ этот порог будет равен ~0,65 В.
Задачей предлагаемого изобретения является повышение надежности устройства для контроля частоты вращения за счет повышения его помехоустойчивости.
Технический результат достигается тем, что в устройстве для контроля частоты вращения, содержащем датчик частоты вращения, формирователь импульсов, блок измерения, блок анализа информации и источник напряжения постоянного тока, причем выход блока измерения подключен через блок анализа информации к выходу устройства, формирователь импульсов выполнен в виде формирователя импульсов с дифференциальным входом, источник напряжения постоянного тока выполнен в виде источника симметричных напряжений, а также в него введены пять резисторов и конденсатор, причем первый выход датчика частоты вращения через первый резистор подключен к положительной шине источника симметричных напряжений и через второй резистор - к первому входу формирователя импульсов с дифференциальным входом, второй вход которого через третий резистор подключен к второму выходу датчика частоты вращения и к общей шине питания, через четвертый резистор - к отрицательной шине источника симметричных напряжений, через пятый резистор - к входу блока изменения и к выходу формирователя импульсов с дифференциальным входом, первый и второй входы которого через конденсатор соединены между собой.
Сущность предлагаемого изобретения поясняется фиг.1-8, на которых представлены:
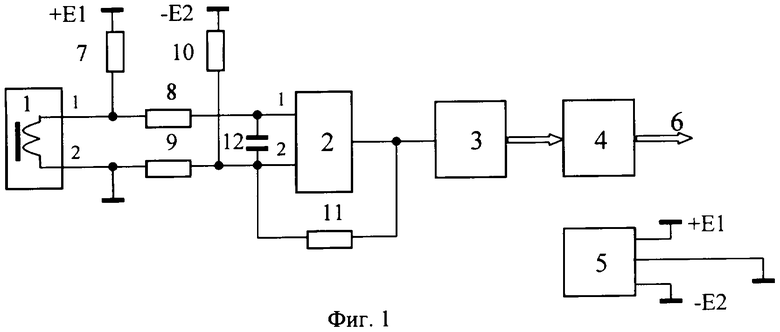
фиг.1 - блок-схема предлагаемого устройства для контроля частоты вращения;
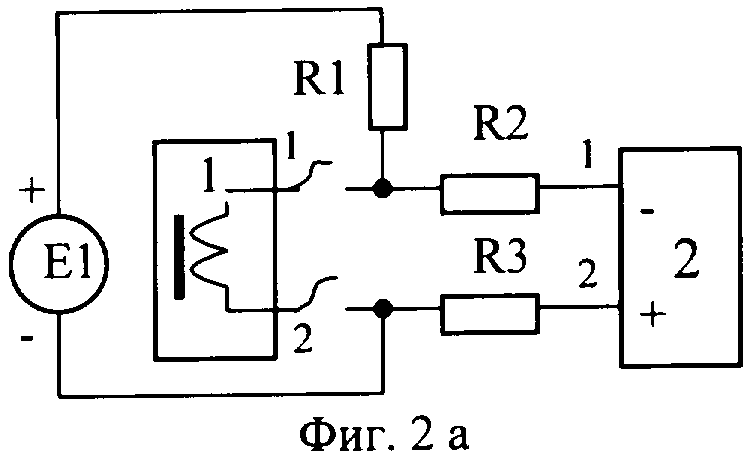
фиг.2 - схема запирания формирователя импульсов с дифференциальным входом 2 при обрывах датчиковых цепей устройства;
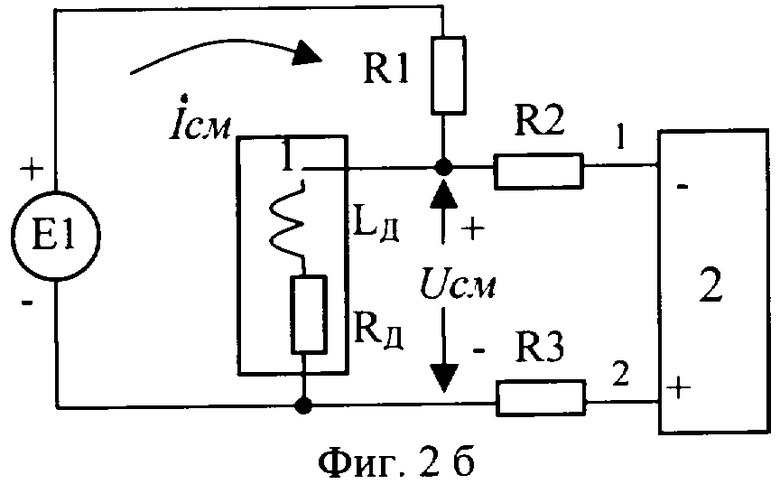
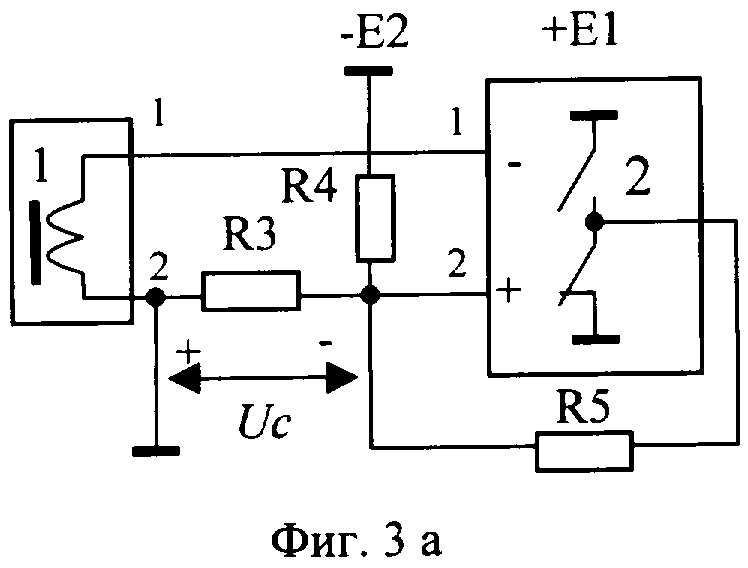
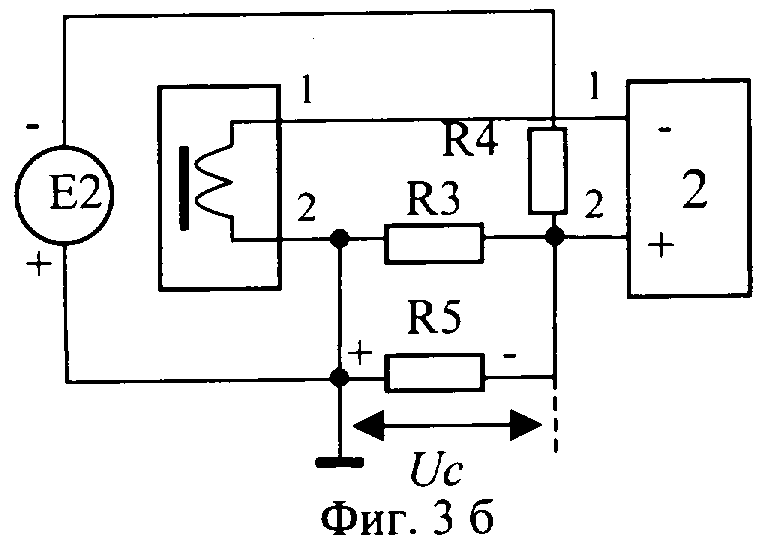
фиг.3 - схема задания порога срабатывания формирователя импульсов с дифференциальным входом 2;
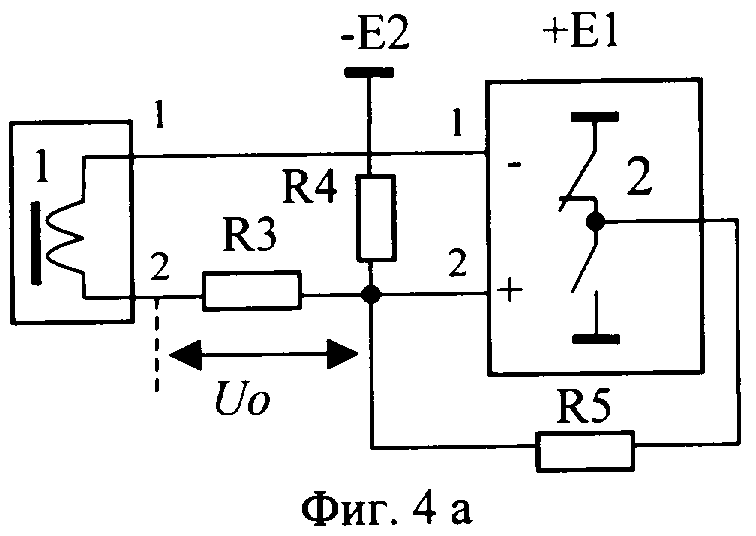
фиг.4 - схема задания порога отпускания формирователя импульсов с дифференциальным входом 2;
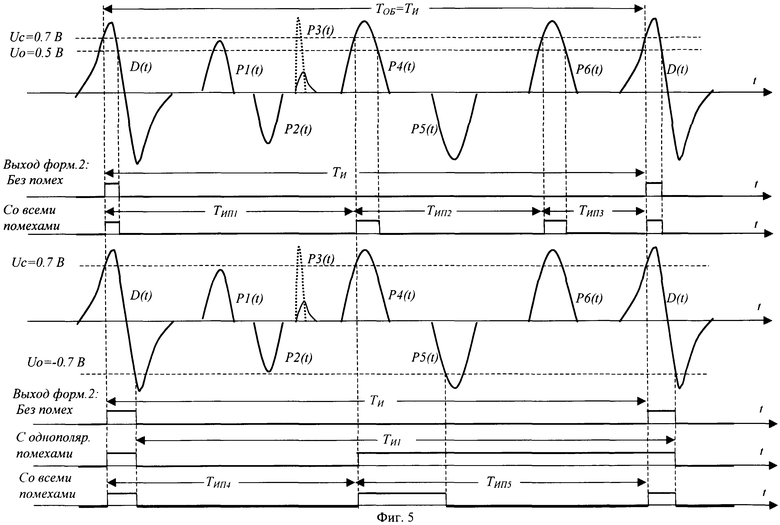
фиг.5 - временные диаграммы работы формирователя импульсов с дифференциальным входом 2 при наличии помех в датчиковых цепях, действующих в промежутках времени между сигналами датчика частоты вращения 1;
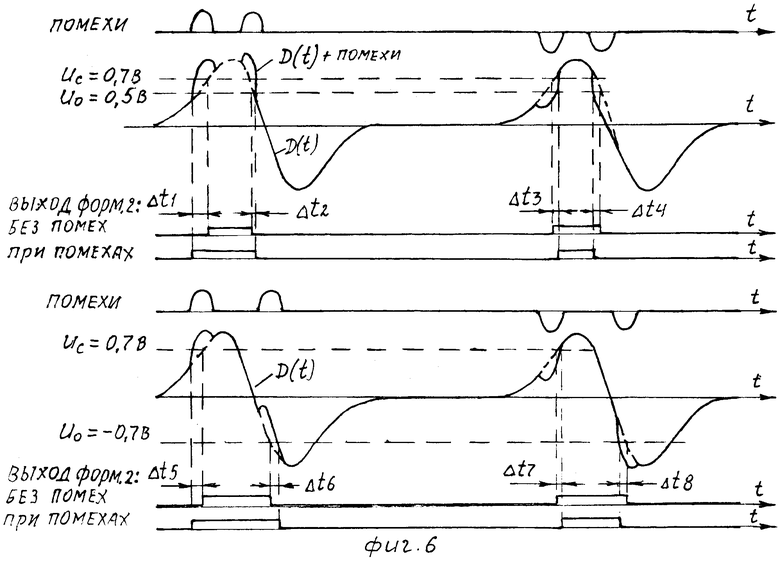
фиг.6 - временные диаграммы работы формирователя импульсов с дифференциальным входом 2 при наличии помех, действующих в то время, когда величина сигналов датчика частоты вращения 1 достигает порогов переключения упомянутого формирователя импульсов;
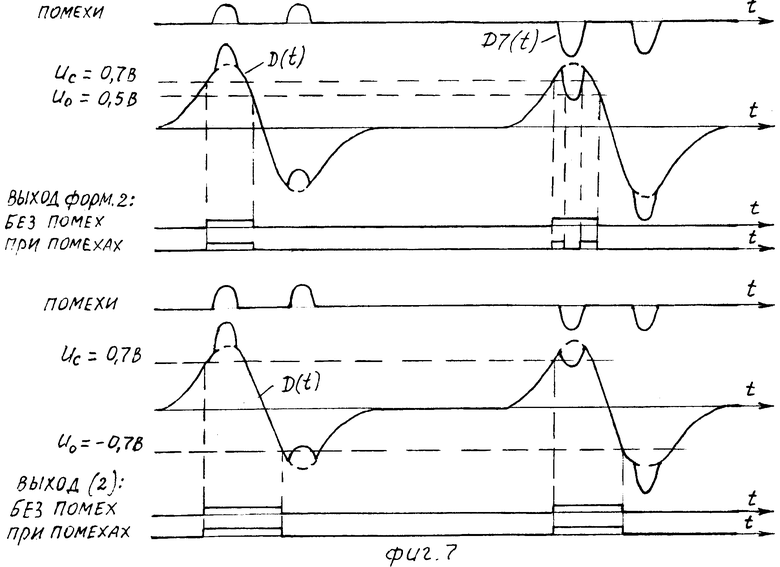
фиг.7 - временные диаграммы работы формирователя импульсов с дифференциальным входом 2 при наличии помех в датчиковых цепях, действующих тогда, когда величина сигналов датчика частоты вращения 1 превышает пороги переключения этого формирователя;
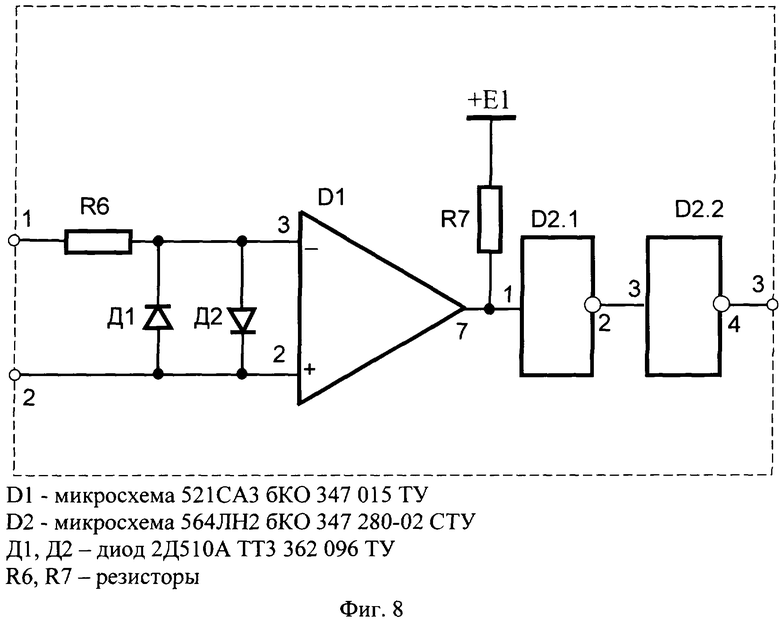
фиг.8 - схема одного из вариантов реализации формирователя импульсов с дифференциальным входом 2.
В состав предлагаемого устройства для контроля частоты вращения (фиг.1) входят датчик частоты вращения 1, формирователь импульсов с дифференциальным входом 2, блок измерения 3, блок анализа информации 4, источник симметричных напряжений 5, первый 7, второй 8, третий 9, четвертый 10 и пятый 11 резисторы, а также конденсатор 12, причем выход блока измерения 3 подключен через блок анализа информации 4 к выходу устройства 6, первый выход датчика частоты вращения 1 через первый резистор 7 подключен к положительной шине источника симметричных напряжений 5 и через второй резистор 8 - к первому входу формирователя импульсов с дифференциальным входом 2, второй вход которого через третий резистор 9 подключен к второму выходу датчика частоты вращения 1 и к общей шине питания, через четвертый резистор 10 - к отрицательной шине источника симметричных напряжений 5, через пятый резистор 11 – к входу блока измерения 3 и к выходу формирователя импульсов с дифференциальным входом 2, первый и второй входы которого через конденсатор 12 соединены между собой.
В тексте описания и на фиг.1-8 приняты следующие обозначения:
датчик 1 - датчик частоты вращения 1;
формирователь импульсов 2 - формирователь импульсов с дифференциальным входом 2;
источник напряжений 5 - источник симметричных напряжений 5;
+Е1, -Е2 - напряжение соответственно положительной и отрицательной выходных шин источника напряжений 5, причем полярность напряжений определяется относительно общей шины питания;
R1, R2, R3, R4 и R5 - соответственно первый 7, второй 8, третий 9, четвертый 10 и пятый 11 резисторы;
обозначения типа R35 - сопротивление цепи, состоящей из двух параллельно соединенных резисторов R3 и R5;
С - конденсатор 12;
Uc - напряжение, равное порогу срабатывания формирователя импульсов 2;
Uо - напряжение, равное порогу отпускания формирователя импульсов 2;
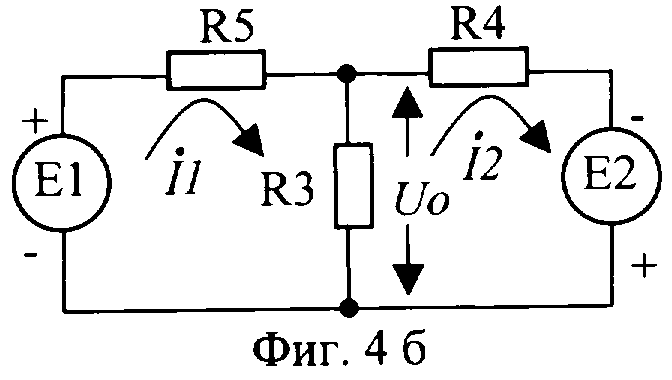
Uо I, Uо II - составляющие напряжения Uо, обусловленные наличием соответственно в первом контуре напряжения Е1 и во втором контуре напряжения Е2 (фиг.4б);
Рд, Lд - соответственно сопротивление и индуктивность датчика 1;
 - ток цепи запирания формирователя импульсов 2;
- ток цепи запирания формирователя импульсов 2;
uсм - напряжение смещения, обусловленное током  ;
;
 ,
,  - токи соответственно в первом и втором контурах схемы фиг.4б;
- токи соответственно в первом и втором контурах схемы фиг.4б;
Qc, Qо, S - промежуточные параметры, используемые при расчете значений R4 и R5 и равные Qc=E2/Uc, Qо= E1/Uо;
S=QсQо-2Qо+Qc;
Ucн, Uон - значения напряжений соответственно срабатывания и отпускания, получаемые после настройки порогов переключения формирователя импульсов 2;
δ с, δ o - относительная погрешность настройки порогов соответственно срабатывания Uc и отпускания Uo формирователя импульсов 2;
D(t) - сигналы датчика 1;
Р 1(t),... , P7(t) - сигналы помех;
AП - амплитуда сигналов помех;
τ д, τ п - длительность сигналов соответственно датчика 1 и помех;
ТOБ - период вращения ротора исследуемого объекта;
Ти - измеряемый интервал времени;
Тип1,... , Тип6 - измеряемые интервалы времени, соответствующие периоду следования сигналов датчика 1 и помех;
Δ t1,... , Δ t8 - абсолютные погрешности длительности выходных сигналов формирователя импульсов 2;
В предлагаемом устройстве вновь введенный резистор R1 и его связи обеспечивают запирание формирователя импульсов 2 при обрыве датчиковых цепей (фиг.2а). В этом случае положительное напряжение Е1 источника напряжений 5 будет подано на первый вход формирователя импульсов 2 и последний окажется блокированным в исходном состоянии.
Цепь, состоящая из резисторов R3 и R4, предназначена для задания порога срабатывания Uc формирователя импульсов 2 (фиг.3а).
Резистор R5 установлен в цепи положительной обратной связи, охватывающей формирователь импульсов 2. Эта цепь обеспечивает скачкообразное изменение состояния формирователя импульсов 2.
Резисторы R2, R3 и конденсатор С представляют собой интегрирующую цепь (фильтр нижних частот), установленную на входе формирователя импульсов 2.
Предлагаемое устройство работает следующим образом. В исходном состоянии, когда сигналы датчика 1 отсутствуют, на вход формирователя импульсов 2 подается закрывающее напряжение Uc, которое выделяется на резисторе R3 и является порогом срабатывания формирователя импульсов 2 (фиг.3а). При этом на выходе формирователя импульсов 2 будет низкое напряжение, соответствующее логическому 0, и резистор цепи обратной связи R5 окажется подключенным параллельно резистору R3 (фиг.3б).
Из схемы (фиг.3б) получаем:
 где
где 
Из выражения (1) следует, что порог срабатывания Uc формирователя импульсов 2 при постоянных значениях Е2 и R3 зависит от величин резисторов R4 и R5.
Введя обозначение E2/Uc=Qc, после несложных преобразований уравнений (1) получим первую зависимость между величинами резисторов R4 и R5:

При поступлении с выхода датчика 1 на вход формирователя импульсов 2 открывающего сигнала, амплитуда которого превышает порог срабатывания Uc, происходит срабатывание формирователя импульсов 2 и на его выходе устанавливается высокое напряжение, соответствующее логической 1 (фиг.4а).
В этом случае на резисторе R3 выделится напряжение, которое определяет порог отпускания Uo формирователя импульсов 2 и при постоянных значениях E1, E2 и R3 будет зависеть от величин тех же резисторов R4 и R5.
Схему фиг.4а можно представить более наглядной схемой фиг.4б, имеющей два контура с общим резистором R3. Для определения величины порога отпускания Uo формирователя импульсов 2 используем метод наложения.
При этом из первого контура фиг.4б определим:
 где
где 

Из второго контура будем иметь:
 где
где 

Учитывая, что применяемый в предлагаемом устройстве источник симметричных напряжений имеет /E1/=/E2/=E, из уравнений (3) и (4) получаем формулу для определения порога отпускания Uо формирователя импульсов 2:

Введя обозначение Qо=E/Uo, из последней формулы получаем вторую зависимость между величинами резисторов R4 и R5:

Таким образом, задача настройки формирователя импульсов 2 на требуемые пороги срабатывания Uc и отпускания Uo сводится к нахождению значений двух настроечных резисторов R4 и R5, связанных между собой системой, состоящей из уравнений (2) и (6).
Решение этой системы уравнений дает следующие результаты:
где S=Qс·Qo-2· Qо+Qс.
Из вышеприведенного следует методика расчета значений настроечных резисторов R4 и R5, которую проиллюстрируем на двух примерах.
Пример 1. Пусть дано /Е1/=/Е2/=Е=10B, R3=1000 Ом.
Требуется определить значения резисторов R4 и R5, обеспечивающие однополярные пороги переключения формирователя импульсов 2 с Uc=0,7 В и Uо=0,5 В.
1) Определяем значения промежуточных параметров:

S=Qс·Qo-2· Qo+Qc=14,286· 20-2· 20+14,286=260.
2) По формулам (7) и (8) определяем:


3) По ряду Е24 ГОСТ 28884-90 выбираем резисторы R4=13 кОм и Р5=47 кOм.
4) Для оценки погрешности настройки порогов, обусловленной выбором резистора R5 (принято 47 кОм, вместо требуемых 45,5 кОм) определяем по формулам (1) и (5) ожидаемые значения Uc и Uo:

 погрешность настройки Uc равна
погрешность настройки Uc равна 

Погрешность настройки Uо определяется:
Пример 2. При исходных данных примера 1 определить значения резисторов R4 и R5, обеспечивающие двухполярные симметричные пороги переключения формирователя импульсов 2 с U=0,7 В; Uo=-0,7 В.
1) Определяем Qc=14,286; Q0=-14,286; S=-161,224;
2) R4 =11286 Ом; R5=5643 Ом;
3) Выбираем R4=11 кОм; R5=5,6 кОм;
4) R35=848,485 Ом; Ucн=0,716 В; δ с=2,3%, Uон=0,690 В;
δ o=-1,3%.
При отсутствии обрывов и коротких замыканий в датчиковых цепях наличие в предлагаемом устройстве цепи запирания входа формирователя импульсов 2 (фиг.2а) приводит к незначительному смещению порогов переключения этого формирователя, которое определяется (фиг.2б): Uсм=Е1· Rд/(R1+Rд), что, например, при Е1=10 В, R1=820 кОм, Rд=800 Ом составит Uсм<0,01 В.
Форма и амплитуда сигналов датчика частоты вращения 1 зависят как от электрических и конструктивных параметров самого датчика, так и от аналогичных параметров возбудителя, с которым работает этот датчик. Кроме того, амплитуда сигналов датчика 1 в значительной мере зависит от зазора между датчиком 1 и возбудителем и от линейной скорости вращения возбудителя [3]. Причем чаще всего датчики частоты вращения вырабатывают двухполярные сигналы, имеющие колоколообразную форму (см. кривые D(t) на фиг.5-7).
Рассмотрим работу двух вариантов реализации предлагаемого устройства, описанных в примерах 1 и 2 при наличии помех в датчиковых цепях. Для упрощения вначале рассмотрим работу этих устройств при существовании помех в промежутках времени между сигналами датчика 1 (фиг.5), затем при воздействии помех в то время, когда величина сигналов датчика 1 достигает порогов переключения формирователя импульсов 2 (фиг.6) и, наконец, когда величина сигналов датчика 1 превышает пороги переключения формирователя импульсов 2, то есть при:
/D(t)/>/Uc/ и /D(t)/>/Vо/(фиг.7).
Из графиков фиг.5 следует:
1. Импульсы помех любой длительности и полярности, амплитуда которых не превышает порога срабатывания Uc, например импульсы P1(t) и P2(t), не приводят к ложному срабатыванию формирователя импульсов 2 и поэтому на работу предлагаемого устройства не влияют.
2. Импульсы помех с длительностью τ n<<τ d, например P3(t), также на работу устройства не влияют, поскольку они значительно ослабляются интегрирующей цепью, состоящей из резисторов R2, R3 и емкости С.
3. Однополярные отрицательные импульсы помех, например P5(t), на работу устройства не влияют, так как во время их действия формирователь импульсов 2 находится в исходном состоянии.
4. При действии однополярных положительных импульсов помех, например P4(t) и P6(t), формирователь импульсов 2 с однополярными порогами переключения (пример 1) вырабатывает ложные сигналы, а формирователь импульсов 2 с двухполярными порогами переключения (пример 2) формирует выходной сигнал, начало которого совпадает с передним фронтом первого импульса - помехи P4(t). В последнем случае для определения периода вращения ротора исследуемого объекта необходимо измерять интервал времени ТИ1, формируемый фронтом спада двух соседних импульсов.
Из графиков фиг.6 следует, что помехи, действующие во время достижения сигналом датчика 1 порогов переключения формирователя импульсов 2, приводят к изменениям длительности выходных импульсов этого формирователя, что, в свою очередь, вызывает погрешности измерения интервалов времени Ти.
И, наконец, из графиков фиг.7 можно сделать вывод, что помехи, имеющие амплитуду /AП/</Uc/+/Uo/ и действующие, когда /D(t)/>/Uo/, например помехи P7(t), приводят к ложному срабатыванию формирователя импульсов 2 с однополярными порогами переключения и не влияют на работу формирователя импульсов 2 с двухполярными порогами переключения.
Таким образом, более рациональным с точки зрения помехоустойчивости является предлагаемое устройство, в котором формирователь импульсов 2 настроен на двухполярные симметричные пороги переключения (пример 2).
В предлагаемом устройстве в качестве датчика 1 может быть использован один из индукционных импульсных датчиков частоты вращения [3], например преобразователь частоты вращения ОГ 018 Вт2.780.018; в качестве формирователя импульсов 2 - блок, состоящий из компаратора 521 СА3 бКО.347.015 ТУ2, двух инверторов 564ЛН2 бКО.347.064 ТУ2, двух диодов и двух резисторов (фиг.8); в качестве блока измерения 3 - преобразователь периода в код, приведенный в [4], в качестве блока анализа информации 4 - один из выпускаемых промышленностью микропроцессоров, например 1806ВМ2 бКО.347.456 ТУ; в качестве источника напряжений 5 - преобразователь переменного напряжения в двухполярное напряжение постоянного тока и стабилизатор напряжения 142ЕН6 бКО.347.098 ТУ5.
Таким образом, в предлагаемом устройстве осуществляются подавление высокочастотных помех, блокирование входа формирователя импульсов 2 при обрывах датчиковых цепей, а также предусмотрена возможность настройки порогов переключения формирователя импульсов 2, что позволяет оптимизировать параметры схемы с целью получения максимальной помехоустойчивости устройства.
Предлагаемое устройство предназначено для применения прежде всего в системах аварийной защиты энергонасыщенных объектов, например жидкостных ракетных двигателей. При этом одним из источников помех могут быть электрические цепи (кабели) системы управления двигателем, по которым осуществляется подача мощных сигналов, управляющих исполнительными элементами двигателя (пироклапанами, электропневмоклапанами и др.).
Предлагаемое устройство обладает повышенной помехоустойчивостью и тем самым обеспечивает более высокую, по сравнению с известными устройствами, надежность контроля частоты вращения исследуемого объекта.
Литература
1. Авторское свидетельство №1296941, МПК G 01 Р 3/489.
2. Авторское свидетельство №1677639, МПК G 01 Р 3/48.
3. Датчики теплофизических и механических параметров. Справочник./Под общей редакцией Ю.Н.Коптева. Том 2, М., издательское предприятие журнала "Радиотехника", 2000 г., стр.560.
4. Патент RU №2178908, МПК G 04 F 10/04.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЧАСТОТЫ ВРАЩЕНИЯ | 2006 |
|
RU2343490C2 |
| СЕНСОР ДЛЯ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ ПРИ ПОМОЩИ СВЕРХШИРОКОПОЛОСНОГО ЗОНДИРУЮЩЕГО СИГНАЛА (ВАРИАНТЫ) | 2006 |
|
RU2311658C9 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЧАСТОТЫ ВРАЩЕНИЯ | 2003 |
|
RU2240565C1 |
| АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД | 1999 |
|
RU2162239C1 |
| ПАРЦИАЛЬНЫЙ ДАТЧИК РАСХОДА | 2005 |
|
RU2324148C2 |
| ПАРЦИАЛЬНЫЙ ДАТЧИК РАСХОДА | 2005 |
|
RU2324147C2 |
| УСТРОЙСТВО ДЛЯ ОХРАНЫ ОБЪЕКТА | 1993 |
|
RU2070116C1 |
| Устройство для контроля подвижной системы электромагнитного аппарата | 1990 |
|
SU1767567A1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛА ДОПЛЕРОВСКОГО РАДИОВЫСОТОМЕРА | 2008 |
|
RU2390794C2 |
| ДАТЧИК ПЕРЕМЕЩЕНИЯ КОЛЕСА | 2001 |
|
RU2235657C2 |
Изобретение относится к контрольно-измерительной технике. Устройство содержит датчик частоты вращения, формирователь импульсов, блок измерения, блок анализа информации и источник напряжения постоянного тока, а также пять резисторов и конденсатор. Первый выход датчика частоты вращения через первый резистор подключен к положительной шине источника симметричных напряжений и через второй резистор - к первому входу формирователя импульсов с дифференциальным входом, второй вход которого через третий резистор подключен к второму выходу датчика частоты вращения и к общей шине питания, через четвертый резистор - к отрицательной шине источника симметричных напряжений, через пятый резистор - к входу блока измерения и выходу формирователя импульсов с дифференциальным входом, первый и второй входы которого через конденсатор соединены между собой, выход блока измерения подключен через блок анализа информации к выходу устройства, формирователь импульсов выполнен в виде формирователя импульсов с дифференциальным входом, источник напряжения постоянного тока выполнен в виде источника симметричных напряжений. Техническим результатом является повышение надежности контроля. 8 ил.
Устройство для контроля частоты вращения, содержащее датчик частоты вращения, формирователь импульсов, блок измерения, блок анализа информации и источник напряжения постоянного тока, причем выход блока измерения подключен через блок анализа информации к выходу устройства, отличающееся тем, что формирователь импульсов выполнен в виде формирователя импульсов с дифференциальным входом, источник напряжения постоянного тока выполнен в виде источника симметричных напряжений, а также в него введены пять резисторов и конденсатор, причем первый выход датчика частоты вращения через первый резистор подключен к положительной шине источника симметричных напряжений и через второй резистор - к первому входу формирователя импульсов с дифференциальным входом, второй вход которого через третий резистор подключен к второму выходу датчика частоты вращения и к общей шине питания, через четвертый резистор - к отрицательной шине источника симметричных напряжений, через пятый резистор - к входу блока измерения и выходу формирователя импульсов с дифференциальным входом, первый и второй входы которого через конденсатор соединены между собой.
| Сигнализатор предельных значений частоты вращения | 1989 |
|
SU1677639A1 |
| Сигнализатор предельных значений угловой скорости | 1984 |
|
SU1296941A1 |
| СИГНАЛИЗАТОР ПРЕДЕЛЬНЫХ ЗНАЧЕНИЙ УГЛОВОЙ СКОРОСТИ | 1991 |
|
RU2012891C1 |
| US 4975642 А, 04.12.1990 | |||
| УСТРОЙСТВО ДЛЯ НАПРАВЛЕННОГО БУРЕНИЯ СКВАЖИН | 1990 |
|
RU2017922C1 |

