Изобретение относится к контрольно- измерительной технике и может быть использовано в системах автоматического управления и контроля, в которых информация представлена в частотной форме.
Цель изобретения - повышение надежности.
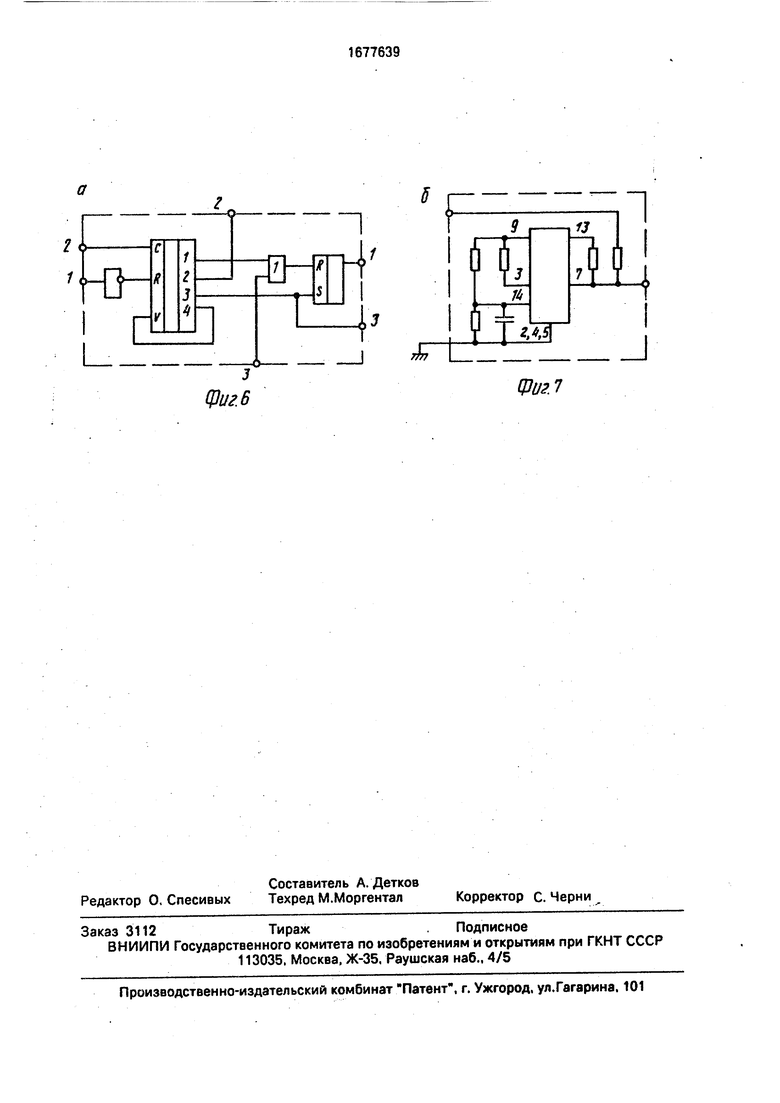
На фиг. 1 представлена блок-схема i сигнализатора предельных значений частоты вращения; на фиг. 2 - частотный диапазон работы исследуемого объекта; на фиг. 3 - временные диаграммы для различных случаев возникновения помех; на фиг. 4 - временные диаграммы сигналов датчика при пропадании одного и двух информационных импульсов; на фиг. 5 - временные диаграммы работы устройства; на фиг. 6 - принципиальная схема блока управления;
на фиг, 7 - принципиальная схема блока начальной установки.
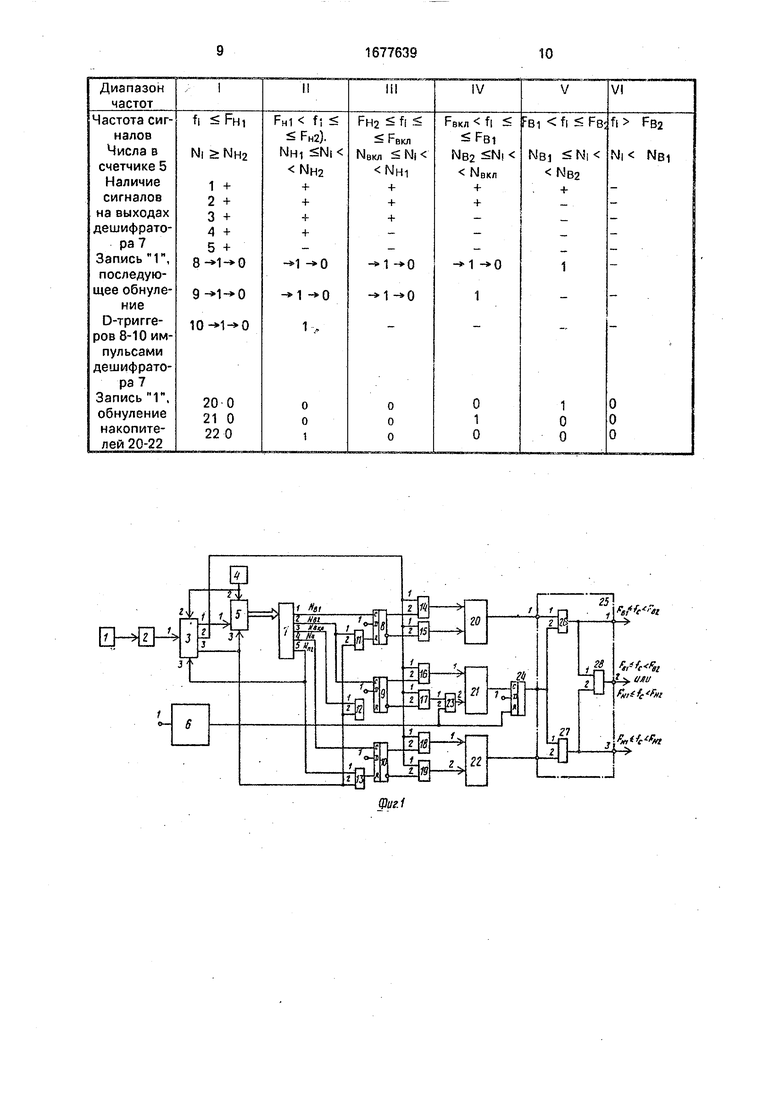
В состав сигнализатора входят датчик 1 скорости вращения, формирователь 2 входных сигналов,блок 3 управления,генератор 4 опорной частоты ГОЧ, счетчик 5, блок б начальной установки, дешифратор 7, пер- вый-третий D-триггеры 8-10, первый-третий элементы ИЛИ 11-13, первый-шестой элементы И 14-19, первый-третий пороговые накопители 20-22, четвертый элемент ИЛИ 23, четвертый D-триггер 24, формирователь 25 выходных команд, состоящие из седьмого элемента И 26 и восьмого элемента И 27 и пятогоо элемента ИЛИ 28.
Сигнализатор предельных значений частоты вращения работает следующим образом.
DS VJ
Os
СлЭ
После подачи на устройство напряжения питания на входе блока 6 начальной установки появляется потенциал, соответствующий 1, и блок 6 формирует одиночный импульс, который обнуляет накопитель 21 и устанавливает триггер 24 в исходное состояние, при котором с выхода этого триггера на второй вход формирователя 25 по- дается запрещающий сигнал.
С приходом от датчика 1 сигнала Ci (фиг. 5), соответствующего концу Ти и началу Ti контролируемого периода, происходит запуск формирователя 2, который вырабатывает импульс, разрешающий работу блока 3 управления. При этом на первом выходе блока 3 появляется импульс, который подается на первый вход счетчика 5 и запрещает поступление сигналов ГОЧ 4 в счетчик 5 и тем самым заканчивается процесс преобразования периода Ти а код Ми.
Через интервал времени Г|, величина которого должна быть большей продолжительности переходных процессов в счетчике 5, появляется импульс на втором выходе блока 3 управления. Этот импульс подается на первые входы элементов А 14-19 и в устройстве заканчивается контроль числа, полученного в результате преобразования периода Ти в код Ми.
После окончания импульса на втором выходе блока 3 управления появляется импульс на третьем выходе этого блока и заканчивается запрещающий импульс на его первом выходе. Импульс с третьего выхода блока 3 обнуляет счетчик 5 и D-тригге- ры 8-10.
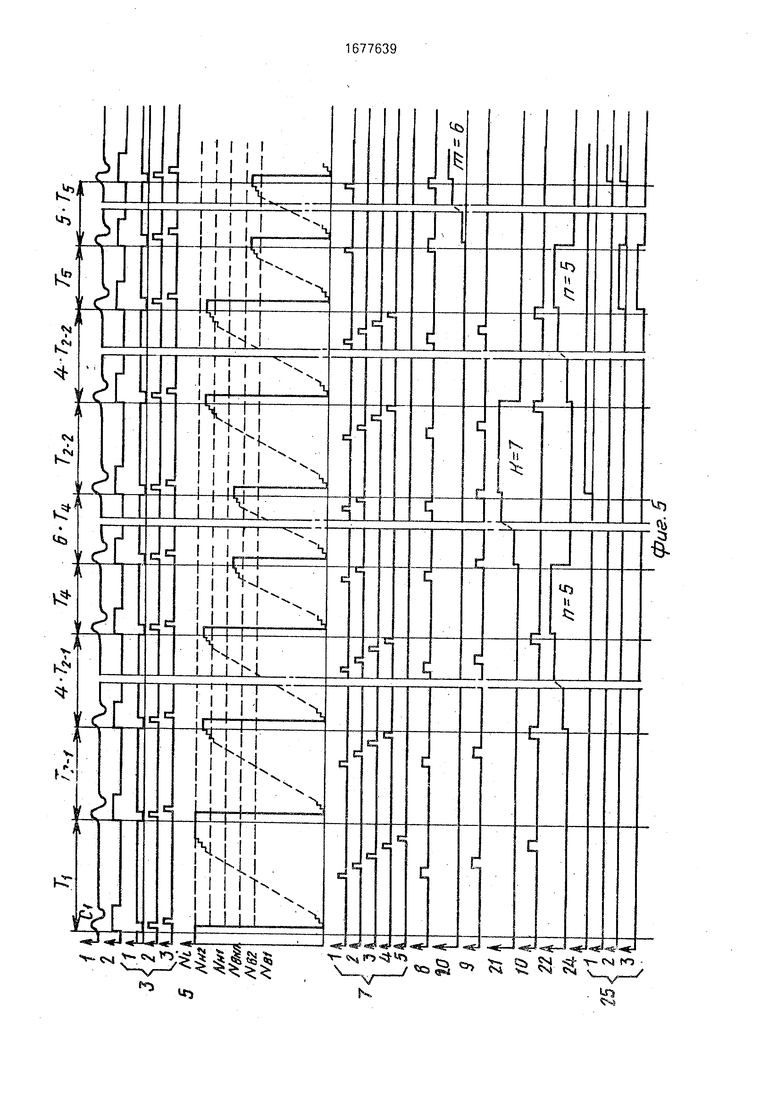
С окончанием импульса на третьем выходе блока 3 управления начинается новый цикл контроля частоты вращения, осуществляемый посредством измерения и контроля длительности периода Т|. При этом в счетчике 5 в течение периода TI производится счет импульсов ГОС 4. Информация о числе импульсов Mi, накопленных в счетчике 5, непрерывно поступает на вход дешифратора 7.
Число NJ накапливаемых в счетчике 5 импульсов зависит от частоты вращения исследуемого объекта, которая прямо пропорциональна частоте сигналов датчика 1, и определяет работу дешифратора 7, D-триг- геров 8-10 и накопителей 20-22 в соответствии с таблицей.
Состояние триггеров 8-10 изменяется под воздействием соответствующих выходных импульсов дешифратора 7 и управляющего импульса с третьего выхода блока 3, а состояние накопителей 20-22 зависит от состояния триггеров 8-10 и изменяется в момент поступления на схемы Л 14-19 импульса с второго выхода блока 3 управления (см. фиг. 5).
Поэтому после подачи на предлагаемое
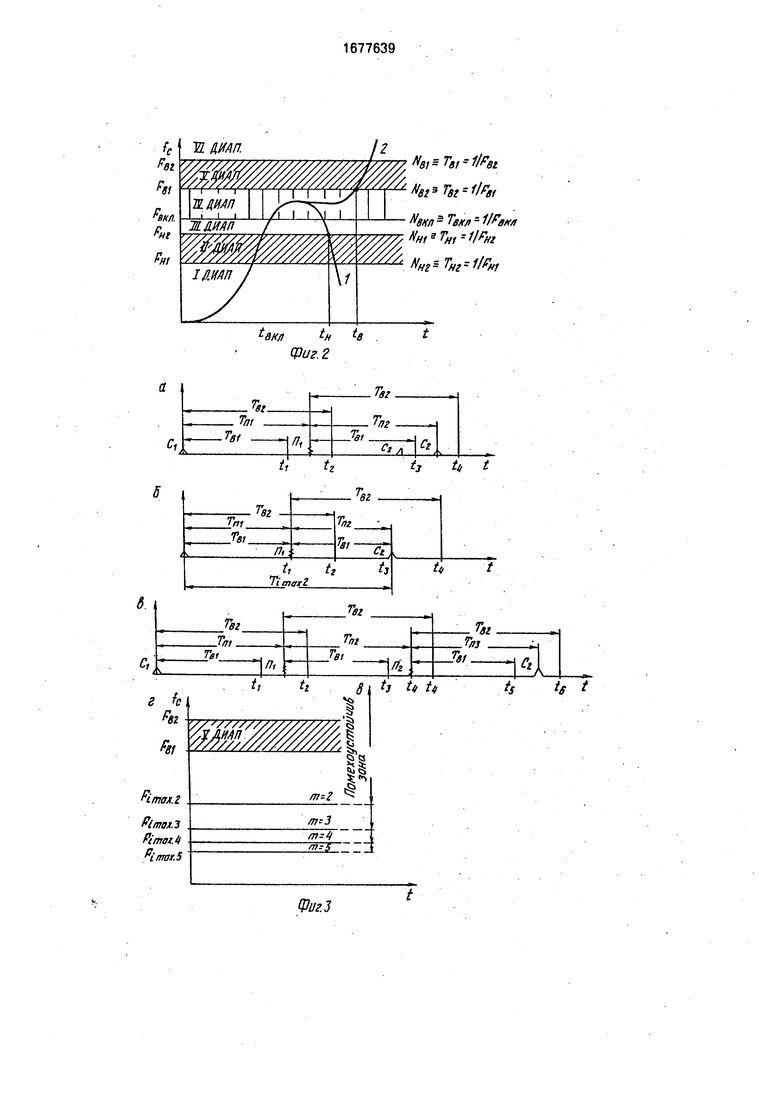
устройство напряжения питания и последующего запуска исследуемого объекта (фиг. 2) частота сигналов датчика 1 будет повышаться от значений fi FH1 (I диапазон частот на фиг. 2), которым соответствует период следования Т на фиг. 5, и при достижении значений частот II диапазона (периоды Tz-1 на фиг. 5) накопитель 22 в соответствии с таблицей сформирует выходной сигнал. Однако этот сигнал не будет
передан через формирователь 25 на выход устройства, так как на втором входе формирователя 25 имеется запрещающий сигнал. При достижении частотой сигналов датчика 1 значений, находящихся в диапазоне
включений (IV диапазон частот на фиг. 2, периоды Тд на фиг. 5) накопитель 21 сформирует выходной сигнал, который установит триггер 24 в рабочее состояние. С выхода триггера 24 на второй вход формирователя
25 будет подаваться разрешающий сигнал. Если в дальнейшем скорость вращения понизится и частота сигналов датчика 1 достигнет значений, находящихся во II диапазоне (периоды Т2-2 на фиг. 5), то накопитель
22 сформирует открывающий сигнал, который будет подан на третий вход формирователя 25 и устройство выработает выходную команду, свидетельствующую об аварийном понижении частоты вращения (FH1 fi s
Рнг).
Если же частота вращения вместо пони жения повысится и частота сигналов датчи ка 1 окажется в пятом диапазоне (периоды Ts на фиг. 5), то накопитель 20 выработает
открывающий сигнал, который будет подан на первый вход формирователя 25 и устройство выработает команду, свидетельствующую об аварийном повышении частоты вращения (FBI ft - 82)в обоих случаях выхода частоты сигналов датчика 1 за заданные пределы на втором выходе формирователя 25 появляется i выходная команда устройства, свидетельствующая о нарушении номинального (рабочего) режима исследуемого объекта.
Предлагаемое устройство позволяет контролировать выход частоты за пределы рабочего диапазона. При этом устройство включается в режим контроля при достижении частотой сигналов датчика 1 значений,
находящихся в диапазоне включения (IV диапазон частот на фиг. 2, значения частот от Рвкл до FBI). При последующем аварийном повышении частоты {кривая 2 на фиг.
2) с уходом ее в верхний диапазон частоты срабатывания устройства (V диапазон частот на фиг. 2, значения частот от FBI ДО Fsa) или при ее аварийном понижении (кривая 1 на фиг. 2) с уходом в нижний диапазон частоты срабатывания (И диапазон частот, значения частот от Рщ до Рна) предлагаемое устройство формирует соответствующую выходную команду.
Вновь введенные элементы блок-схемы 0-триггер8, элемент ИЛ И 11, накопитель 20 совместно с дешифратором 7 и элементами И 14 и 15 позволяет сузить верхний диапазон частот срабатывания устройства (V дча- пазон частот на фиг. 2) и выпол ыть m-кратное подряд подтверждечие наличия частоты в указаном диапазоне.
При этом обеспечивается помехоустойчивость устройства при работе в условиях воздействия помех. Покажем это на примерах.
Пусть выбрано значение m - 2 иРва/ /FBI Тв2/Тв1 -1, где TBI 1/F2 Тва -1/Рв-|, как показано на фиг. 2 и 3, где Ci - сигнал датчика скорости, соответствующий началу контролируемого периода.
В данном случае устройство Будет формировать выходную команду только после измерения двух следующих друг за другом периодов Т| сигнала датчика 1, каждый из которых имеет длительность Тв Т,
ТВ2Входные сигналы могут быть как сигналами датчика 1, так и сигналами помех. Поэтому при появлении помехи Hi в момент времени от ti до t2 сформируется интервал времени Тщ, причем Тв-| Тщ Тва (фиг. За).
Если при этом второй сигнал С2 датчика 1 поступит на вход устройства в момент времени от т.з до t4, то получится второй интервал времени Тпа с длительностью TBI Тп2 Тв2 и устройство выработает ложную выходную команду.
Если же сигнал С2 поступит до момента времени ta, то будет иметь место Тп.2 Тв{ и устройство не сформирует выходной команды. Поэтому максимальное значение Т i max2 периода следования сигналов датчика 1, при котором устройство оказывается помехоустойчивым, будет иметь место при Тщ s Tri2 TBI и будет равно (фиг. 36)
T|max2 2-TBv
Аналогичным образом для случая с m 3 (фиг. Зв) будем иметь Т,тахз ЗТв. И. наконец, при m - iVi имеем Т|тзхм - М TBI.
5
0
5
0
5
0
5
0
Переходя от длительности периода к частоте, из последнего выражения получим минимальное значение частоты сигналов датчика 1, при котором обеспечивается помехоустойчивая работа устройства (фиг. 3)
М
0
Т I гпахад 2 1 7ГТв7
Из даньой зависимости и фиг. Зг следует, что чем больше число т, тем шире частотная зоьа сигналов датчика скорости в которой обеспечирлетсд помехоустойчивость устроГгтва. Выбоав значение m та- Ki/SK, чтобь1 TimaxM Рпор, где РПор - пороговое значение частоты сигналов датчик 1, при котором амплитуда сигнала дат- чихг 1 становитсг меньше порога срабатыаакия формирователя 2, можно обеспечить помехоустойчивую работу устройства при л,обой частоте вращения.
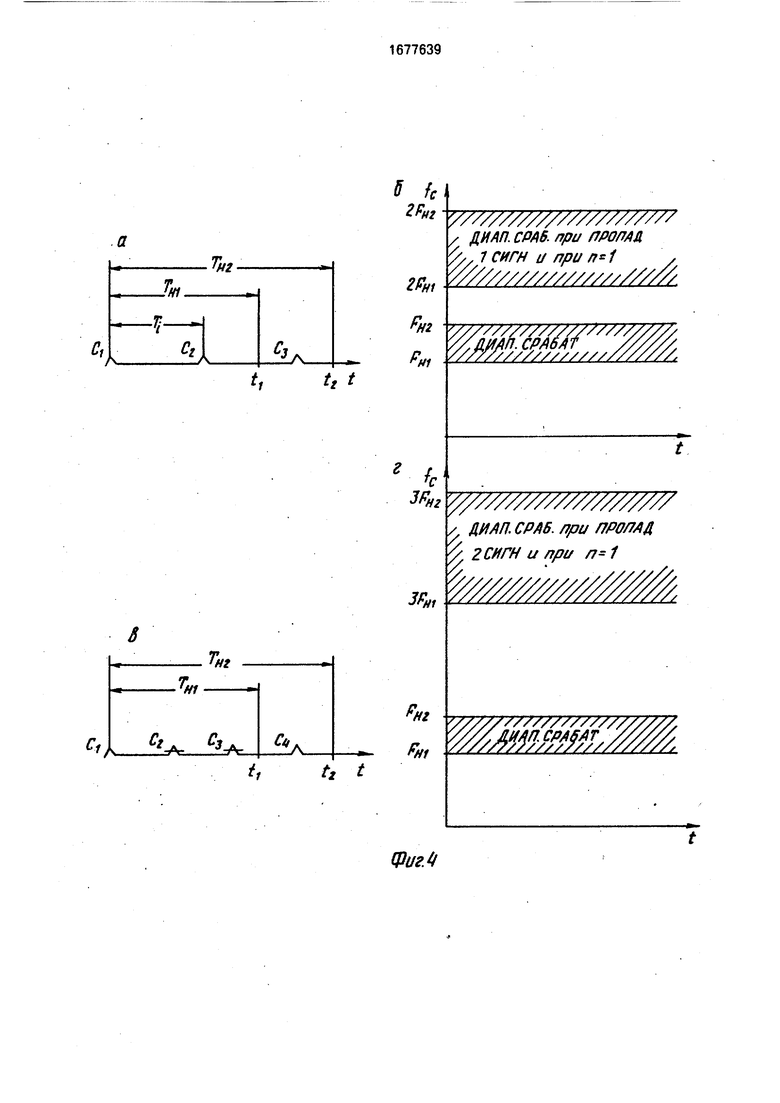
Вновь введенные элементы блок-схемы D-триггер 10, элемент ИЛИ 13, накопитель 22 совместно с дешифратооом 7 и элементами И 18 и 19 позволяют ограничить нижний диапазон частоты срабатывания устройства (II диапазон на фиг. 2) и выполнить n-кратноз подряд подтверждение на- ли«ия частоты в указанном диапазоне.
При этом обеспечивается помехоустой- чивосчь устройства при работе в условиях кратковременных пропаданий сигналов датчика скорости. Так, например, пусть выбрано Рн2/Рн1 Тн2/Тн1 1 , где Тщ - 1/FH2 и Тн2 I/FHI, кзк показано на фиг, 2 и 4, где Ci, C2, Сз и С -соответственно первый - четвертый сигналы датчика скорости. Если п 1 и нет помех и пропаданий сигналов датчика 1, то устройство при снижении частоты вращения будет формировать выходную команду только при Тщ Т| Тн2
Однако в некоторых случаях пропадания сигналов датчика 1 при п 1 устройство может сформировать ложную команду. Так, например, устройство выдает ложную команду при пропадании сигналов 0.2 (фиг. 4а) и поступлении сигнала Сз в момент времени между ti и t2. При этом условие формирования ложной команды определится следующим образом (см. фиг. 46).
Тщ 2Т, ТН2,
11
g- Тщ Т| - Тн2
или 2 Рн2 f 2 FHI
Если принять п 2, то в данном случае пропадание одного сигнала не будет приводить к формированию ложной выходной команды.
Другим случаем является формирование ложной команды при попадании двух соседних сигналов С2 и Сз и поступлении сигнала С4 в момент времени между ц и t2 (фиг, 4в), т.е. при условии (фиг. 4г):
Тит ,
j THI T| -g Тн2 .
3 Рн2 3 FHI
Однако и в данном случае, приняв п 2, можно избежать формирования устройством ложной команды, Аналогичным образом устраняется ложное срабатывание устройства при пропадании 3 и более сигналов датчика скорости.
При этом накопитель 21 обеспечивает включение сигнализатора в режим контроля после К-кратиого подряд подтверждения наличия частоты в диапазоне включения (IV диапазон на фиг, 2), что повышает помехоустойчивость работы устройства во время включения в режим контроля.
Формула изобретения 1. Сигнализатор предельных, значений частоты вращения, содержащий последовательно соединенные датчик скорости вращения, формирователь входных сигналов и блок управления, а также генератор опорной частоты, счетчик, блок начальной установки, дешифратор и шесть элементов И, причем выход генератора опорной частоты соединен с вторыми входами блока управления и счетчика, выход счетчика подключен к входу дешифратора, а третий вход счетчика - к третьему выходу блока управления, отличающийся тем, что, с целью повышения надежности, в него введены четыре D-триггера, четыре элемента ИЛИ, три пороговых накопителя и формирователь выходных команд, причем первый выход блока управления соединен с первым входом счетчика, второй выход - с первыми входами каждого из элементов И, первый выход дешифратора соединен с С-входом первого D-триггера, второй выход дешифратора - с С-входом второго D-триггера и первым входом первого элемента ИЛИ, третий выход дешифратора - с первым входом второго элемента ИЛИ, четвертый выход дешифта- тора - с С-входом третьего D-триггера, пятый выход дешифратора -с третьим входом блока управления и первым входом третьего элемента ИЛИ, третий выход блока управления соединен с вторыми входами первого, второго и третьего элементов ИЛИ, выходы которых подключены соответственно к Н-входам ервого, второго и третьего
D-триггеров, прямые выходы первого, второго и третьего D-триггеров соединены соответственно с вторыми входами первого, третьего и пятого элементов И, инверсные выходы D-триггеров соединены соответственно с вторыми входами второго . четвертого и шестого элементов И, выход первого элемента И соединены с первым входом первого порогового накопителя, выход которого подключен к первому входу формировзтеля выходных команд, а второй вход- к выходу второго элемента И, выход третьего элемента И соединен с первым входом аторого порогового накопителя, выход которого подключен к С-входу четвертого Dтриггера, а второй вход - к выходу четвертого элемента ИЛИ, второй вход которого подключен к выходу блока начальной установки и R-входу четвертого D-триггера, а первый вход подключен к выходу четвертого элемента И, выход пятого элемента И соединен с первым входом третьего порогового накопителя, выход которого подключен к третьему входу формирователя выходных команд, а второй вход - к выходу шестого
элемента И, выход четвертого D-триггера соедини с вторым входом формирователя выходных команд, при этом D-входы D-триггеров и вход блока начальной установки соединены потенциальной шиной питания.
2. Сигнализатор по п. 1, отличающийся тем, что формирователь выходных команд содержит седьмой и восьмой элементы И и пятый элемент ИЛИ, при этом первый вход формирователя выходных команд соединен с первым входом седьмого элемента И, выход которого подключен к первому входу пятого элемента ИЛИ и первому выходу формирователя выходных команд, второй вход формирователя
выходных команд соединен с вторым входом седьмого элемента И и первым входом восьмого элемента И, второй вход которого подключен к третьему входу формирователя выходных команд, а выход восьмого элемента И - к третьему выходу формирователя выходных команд и яторому входу пятого элемента ИЛИ, выход которого подключен к второму выходу формирователя выходных команд,
IP j№ff «
ЪС
или
-Ll F,(te fia
Л ftff t
, 1/Гм
1/Ъ
Нем г Тем 1/fgffa NHisTH1-1irH2
MHZS 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля скорости изменения частоты | 1979 |
|
SU885884A2 |
| Способ передачи и приема телеметрических сигналов и устройство для его осуществления | 1984 |
|
SU1269170A1 |
| Устройство для приема телесигналов | 1983 |
|
SU1300526A1 |
| Сигнализатор предельных значений угловой скорости | 1984 |
|
SU1296941A1 |
| Устройство для цикловой синхронизации | 1981 |
|
SU1107317A1 |
| Устройство избирательного вызова и передачи кодограмм | 1983 |
|
SU1136326A1 |
| УСТРОЙСТВО ДЛЯ РАННЕЙ ДИАГНОСТИКИ ПАТОЛОГИЧЕСКИХ НАРУШЕНИЙ ЧАСТОТЫ СЕРДЕЧНОГО РИТМА | 1993 |
|
RU2082314C1 |
| УСТРОЙСТВО ИЗБИРАТЕЛЬНОГО ВЫЗОВА | 2005 |
|
RU2299525C1 |
| Устройство для выделения команд в телеграфной стартстопно-синхронной системе | 1991 |
|
SU1764178A2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА ДИСКРЕТНЫХ СИГНАЛОВ | 1990 |
|
RU2012149C1 |
Изобретение относится к контрольно- измерительной технике и может быть использовано в системах автоматического управления и контроля, в которых информация представлена в частном виде. Цель изо- бретения - повышение надежности устройства при контроле им выхода частоты за пределы рабочего диапазона за счет повышения помехоустойчивости. Сигнализатор следит за скоростью вращения двигателя таким образом, что при выходе частоты вращения за пределы рабочего диапазона сигнализатор вырабатывает команду о понижении либо повышении частоты от номинальной. При отом команда вырабатывается только поело поступления п-кратного подтверждения об изменении частоты в рабочем режиме. При включении сигнализатора в режиме контроля требуется также п-крат- ное подтверждение о номинальном режиме двигателя, что позволяет избежать случайных помех по цепи частотного датчика, повысить помехоустойчивость сигнализатора, а следовательно, и его надежность, 1 з.п.ф- лы, 7 ил., 1 табл.
акл tH tgt
Фиг 2
it tz
t3 U t
Фиг. 4
Ъ
К
if
SNS
а
б I
Фиг. 7
| Устройство для контроля частоты вращения | 1982 |
|
SU1024845A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
