Изобретение относится к измерительной технике и предназначено для использования в системах автоматического контроля предельных значений угловой скорости различных объектов повышенного быстродействия и высокой точности.
Известно сигнализирующее устройство, содержащее частотный датчик, блок управления, пороговый элемент, задающий генератор, реверсивный счетчик, три элемента И, элемент ИЛИ, два дешифратора, счетчик импульсов, два триггера и указатель [1] . В этом устройстве повышена достоверность формирования результирующего сигнала за счет многократного подтверждения пороговым элементом возникшей аварийной ситуации, однако это привело к снижению его быстродействия, поскольку с учетом возможной флуктуации текущих значений угловой скорости разрядность реверсивного счетчика должна быть достаточно больной, что приводит к увеличению общей длительности измерительного цикла. Кроме того, аппаратурная надежность и помехозащищенность у него остались низкими из-за отсутствия резервирования его схемных элементов.
Известен сигнализатор предельных значений угловой скорости, содержащий формирователь выходных команд и три канала измерения угловой скорости, каждый из которых включает импульсный датчик скорости, счетчик, мажоритарный элемент, триггер, элемент задержки и задатчик предельных значений угловой скорости, при этом в пределах каждого измерительного канала выход датчика скорости соединен с вычитающим входом счетчика, выход мажоритарного элемента через элемент задержки соединен с его входом перезаписи и входом обнуления триггера, через задатчик предельных значений угловой скорости - с первым и вторым входами формирователя выходных команд соответственно и подключен непосредственно к третьему входу своей группы этого формирователя, а выходы счетчика первого, второго и третьего каналов через триггеры подключены к одноименным входам мажоритарных элементов и выходы формирователя являются выходами сигнализатора [2] .
Этот сигнализатор имеет достаточно высокую надежность и помехозащищенность за счет резервирования всех его схемных элементов, однако он обладает низким быстродействием, т. к. принцип его действия основан на измерении длительности фиксированного числа периодов входного сигнала Fx, начало отсчета которых не синхронизировано с моментом возникновения аварийной ситуации. Кроме того, в этом сигнализаторе на точность измерения текущих значений угловой скорости влияет флуктуация частотных сигналов Fx, формируемых датчиками, вызванная биением вала и магнитных вставок, что является его другим недостатком.
Цель изобретения - повышение быстродействия и точности сигнализатора.
На фиг. 1 приведена функциональная электрическая схема сигнализатора; на фиг. 2 - схема преобразователя частота-код и на фиг. 3, 4 - временные диаграммы, поясняющие принцип действия преобразователя частота-код и сигнализатора в целом.
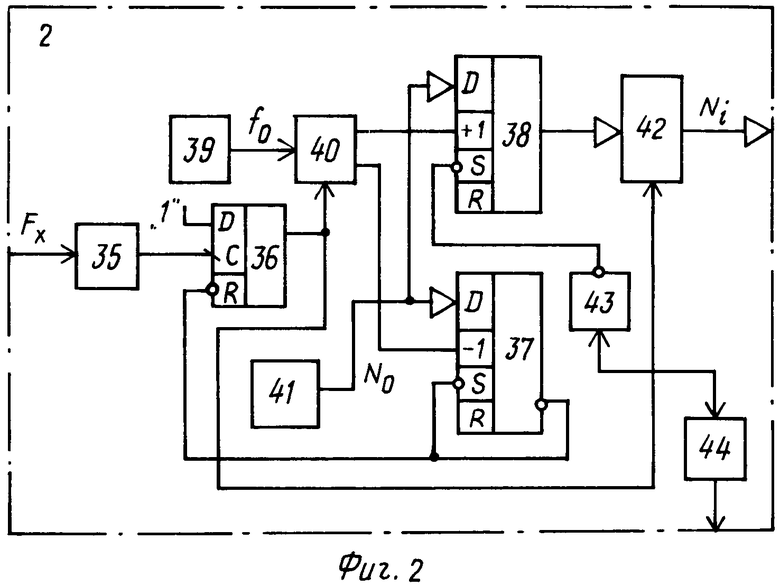
Сигнализатор содержит (фиг. 1) импульсные датчики 1-1 и 1-2 угловой скорости, преобразователи 2-1, 2-2 частота-код, регистры 3, 4, вычитатели 5, 6 и 7 кодов, первый блок 8 сравнения кодов, блок 9 постоянной памяти, элементы И 10, 11, 12, элементы 13, 14 задержки, сумматор 15 кодов, второй 16 и третий 17 блоки сравнения кодов, задатчики 18, 19 предельных значений угловой скорости, ключи 20, 21, счетчики 22 . . . 24 импульсов, RS-триггеры 25 . . . 27 и элемент ИЛИ 28. Поз. 29 и 30 обозначены выходы сигнализатора.
Схемные элементы 3 . . . 9 образуют блок 31 диагностики измерительной информации, считываемой с выходов преобразователей 2-1 и 2-2 частота-код.
Импульсные датчики 1-1, 1-2 угловой скорости, выполненные, например, в виде катушек индуктивности, расположены по окружности диска 32, изготовленного из немагнитного материала, по внешнему диаметру которого равномерно закреплены магнитные вставки 33-1 . . . 33-Z.
Диск 32 насажен на вал 34, скорость которого контролируется посредством предлагаемого сигнализатора. Датчики 1-1 и 1-2 установлены под углом 180о, выдерживаемый с возможно большей точностью, т. е. симметрично оси вала 34. Число магнитных вставок 33-1 . . . 33-Z кратно 4-м.
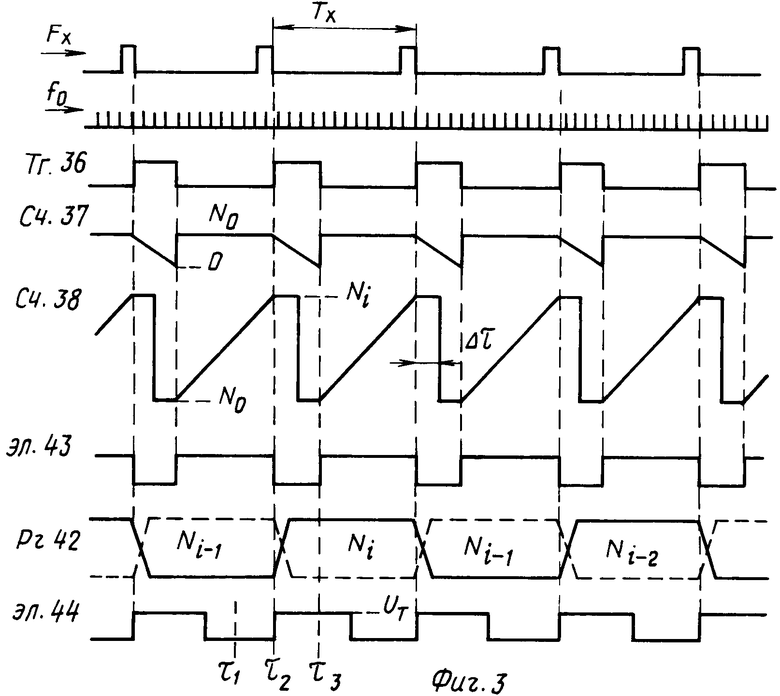
Каждый из преобразователей 2 в предлагаемом варианте содержит (фиг. 2) формирователь 35 импульсов, D-триггер 36, два счетчика 37 и 38 импульса, генератор 39 образцовой частоты fo, ключ 40, блок 41 постоянной памяти, регистр 42, элемент 43 задержки и одновибратор 44 с регулируемым периодом длительности выходного сигнала.
Сигнализатор работает следующим образом.
Предварительно в задатчики 18 и 19 записывают коды, эквивалентные удвоенному числу импульсов Nмакс и Nмин образцовой частоты fo, считываемых счетчиками 37 и 38 преобразователей 2-1, 2-2 за время, равное длительности Тх одного периода входного сигнала F1x или F2x при достижении угловой скорости предельно допустимых значений ωмаксиωмин:
Nмакс= Txf0=  f0=
f0=  f0; (1)
f0; (1)


 , (2) где α - угол между магнитными вставками 33-1 . . . 33-Z;
, (2) где α - угол между магнитными вставками 33-1 . . . 33-Z;
Z - число магнитных вставок.
Счетчики 22 и 23 настраивают таким образом, чтобы электрические сигналы на их выходах переполнения формировались после nмакс(мин)кратного подтверждения блоками 16 и 17 выбега угловой скорости за пределы допустимых значений ωмакс или ωмин , выбираемого в основном, исходя из минимально возможной длительности нахождения контролируемого объекта в критической ситуации. Как правило, nмакс>nмин.
Емкость счетчика 24 устанавливают несколько большей (на 1-2 импульса) числа nмакс. Он необходим для обнуления счетчиков 22 и 23 при несанкционированном единичном срабатывании блоков 16 и 17.
В элементы памяти блока 9 записывают код, например, равный ΔNмакс, используемый для оценки достоверности измерительной информации, выделяемой преобразователями 2-1 и 2-2.
В исходном состоянии счетчики 22 . . . 24 и триггеры 25 . . . 27 обнулены, элементы И 10 . . . 12 закрыты, ключи 20 и 21 разомкнуты. На выходе блока 16 сравнения кодов установлен сигнал высокого уровня (логическая 1), который снимается в тех случаях, когда сумма кодов N1i и N2i, формируемых на выходах преобразователей 2-1, 2-2, превысит по величине код уставки 2 Nмакс задатчика 18. Условием формирования единичного сигнала на выходе блока 17 сравнения кодов является неравенство N1i+N2i>2Nмин.
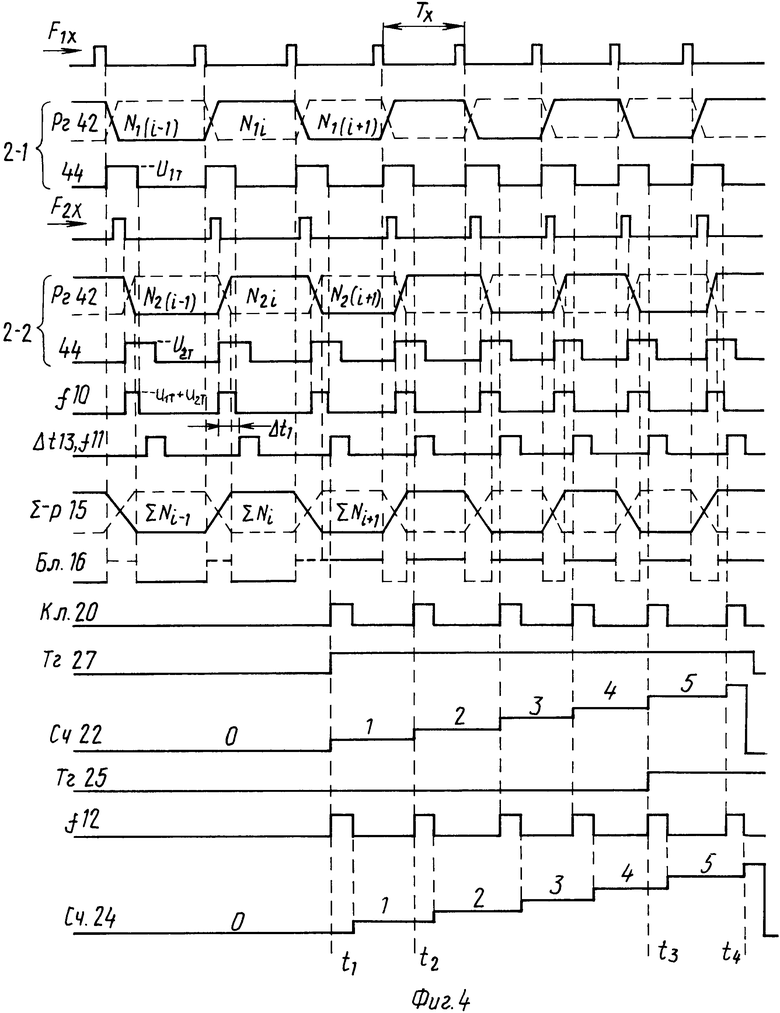
При вращении вала 34, например, с постоянной угловой скоростью ωi, на выходе каждого из датчиков 1-1, 1-2 формируется последовательность импульсов напряжения, поступающая соответственно на информационные входы преобразователей 2-1 или 2-2. Последние работают в циклическом режиме. Например, в произвольный момент времени τ1 (фиг. 3) ключ 40 какого-либо из этих преобразователей находится в верхнем по схеме (фиг. 2) положении и счетчик 38 заполняется импульсами образцовой частоты fo, вырабатываемой генератором 39. При поступлении на вход преобразователя очередного сигнала Fx (момент времени τ2) D-триггер 36 устанавливается в единичное состояние и посредством ключа 40 подсоединяет выход генератора 39 к вычитающему входу счетчика 37. Последний начинает работать в режиме вычитания, а счетчик 38 останавливается и его содержимое (КОD Ni) переписывается в регистр 42. Через интервал времени Δτ, равный настройке элемента 43 задержки и достаточный для заполнения регистра 42 новыми данными, на его выходе формируется сигнал активно низкого уровня, по которому в счетчик 38 переписывается код No начальной уставки, хранящийся в памяти блока 41. При считывании содержимого счетчика 37 до нуля (момент времени τ3) на его выходе возбуждается сигнал переноса в виде логического 0, адресуемый на R-вход D-триггера 36 и на свой S-вход. По этой команде триггер 36 обнуляется, возвращая в исходное состояние ключ 40, а в счетчик 37 переписывается код начальной уставки No. Далее вновь задействуется в работу счетчик 38, причем заполнение его содержимого осуществляется не с нуля, а с учетом начального кода No, и измерительный цикл повторяется.
Таким образом, накопление счетчиком 38 импульсов образцовой частоты f0 возобновляется в начале каждого периода Тх и заканчивается по поступлению в схему очередного импульса измеряемой частоты Fx, причем формирование выходного кода Ni производится с весьма высокой точностью, поскольку на время переключения счетчика 38 задействуется в работу второй счетчик 37.
Кодовые сигналы N1i и N2i, выделяемые на информационных выходах преобразователей 2-1, 2-2, поступают в два адреса: в блок 31 диагностики и на входы сумматора 15. В блоке 31 вычитателя 5 и 6 определяют приращение угловой скорости за интервал времени, равный длительности периода Тх, и полученные результаты передают на входы третьего вычитателя кодов 7:
Δ N1i= N1i-N1(i-1) (3)
Δ N2i= N2i-N2(i-1), (4) где N1(i-1) и N2(i-1) - кодовые значения угловой скорости, полученные на предыдущем измерительном цикле и хранящиеся в регистрах 3, 4.
Вычитатель 7 кодов определяет абсолютную разность вычисленных приращений, а блок 8 сравнивает ее с кодовой уставкой ΔNмакс, сформированной на выходах элементов памяти 9:
|Δ N1i- Δ N2i| ≅Δ Nмакс (5)
Если оба измерительных канала исправны, то разность приращений Δ N1i и Δ N2i близка нулю и ее абсолютное значение будет меньше уставки Δ Nмакс. В этом случае на выходе блока 8 формируется единичный сигнал, который адресуется на 2-й вход элемента И 11, подготавливая его к открытию. Напротив, при появлении какого-либо дефекта в тракте формирования измерительной информации вышеуказанная разность приращений угловой скорости будет заметной и превысит кодовую уставку ΔNмакс - в этом случае на выходе блока 8 будет установлен сигнал низкого уровня (логической 0) и элемент И 11 останется в закрытом состоянии. Аналогичным образом блок 31 отреагирует на прохождение единичной импульсной помехи по какому-либо одному измерительному каналу - на выходе соответствующего преобразователя 2 будет сформирован код Ni, значительно меньший по величине зафиксированного в регистрах 3 или 4, что будет выявлено последующим сравнением разности приращений угловой скорости с уставкой ΔNмакс. Одновременно с вычислениями, выполняемыми блоком 31, сумматор 15 определяет сумму кодов N1i и N2i, а блоки 16, 17 сравнивают полученный результат с уставками 2Nмакс и 2Nмин задатчиков 18, 19. Если угловая скорость ωi, с которой вращается вал 34, находится в пределах рабочего диапазона, т. е. ωмин<ωi<ωмакс, то сумма текущих значений кодов N1i и N2i не превышает по величине код 2 Nмин уставки задатчика 19, но больше кода 2 Nмакс задатчика 18. В этом случае на выходах 16 и 17 будут формироваться сигналы низкого уровня, которые не изменяют состояния схемы сигнализатора вне зависимости от положения ключей 20 и 21.
Импульсные сигналы F1x, F2x, возбуждаемые датчиками 1-1, 1-2, поступают на входы преобразователей 2-1, 2-2 с некоторым временным разбросом, вызванным несколькими причинами, в частности, технологическим допуском на разметку углов α, под которыми магнитные вставки 33-1 . . . 33-Z расположены по окружности диска 32, несоосностью датчиков 1-1, 1-2 и т. д. Этот временной разброс выбирается одновибраторами 44, входящими в состав преобразователей 2-1, 2-2 и настроенным таким образом, что возбуждаемые ими импульсы напряжения U1T, U2T гарантированно перекрывают друг друга во всем диапазоне рабочих скоростей вала 34 (фиг. 4). Тактовые импульсы U1T, U2T суммируются элементом И 10 и результирующий сигнал с его выхода через элементы 13, 11 поступает на управляющие входы ключей 20, 21, причем элемент 13 организует его задержку на время Δt1, равное задержке срабатывания схемных элементов блока 31. Если ωмин<ωi<<ωмакс, то на выходах блоков 16, 17 формируется сигналы низкого уровня и, как было указано выше, после замыкания ключей 20, 21 состояние схемы устройства не меняется.
Если вал 34 начинает вращаться с угловой скоростью, превышающей допустимую величину ( ωi>ωмакс), то сумма кодов N1i+N2i будет меньше уставки 2Nмакс задатчика 18 и на выходе блока 16 будет установлен сигнал высокого уровня (момент времени t1 на диаграмме фиг. 4). После замыкания ключа 20 этот сигнал поступает в два адреса (на счетный вход счетчика 22 и на один из входов элемента ИЛИ 28), следующим образом видоизменяя состояние схемы устройства:
- в счетчик 22 записывается первая единица;
- триггер 27 переводится в единичное состояние, открывая элемент И 22;
- импульсный сигнал, сформированный на выходе элемента 13 задержки, через открытый элемент И 12 транслируется на счетный вход счетчика 24 и также переключает его в единичное состояние. По окончании очередного измерительного цикла (момент времени t2) на выходе элемента 13 задержки вновь возбуждается импульсный сигнал высокого уровня, который увеличивается на 1 содержимое счетчика 24, и если блоки 31, 16 подтверждают соответственно достоверность измерительной информации, установлено на выходах преобразователей 2-1, 2-2, и превышение угловой скоростью заданного порогового значения ωмакс, то после замыкания ключа 20 в счетчик 22 записывается вторая единица.
Аналогичным образом работает схема при формировании на выходах преобразователей 2-1, 2-2 новой измерительной информации, при этом каждый раз задействуется в работу блок 31, а содержимое счетчиков 22, 24 увеличивается на 1.
По заполнении счетчика 22, например, в момент времени t3, на его выходе переполнения возбуждается импульс напряжения, по которому триггер 25 устанавливается в единичное состояние, формируя на выходе 29 сигнализатора электрический сигнал, указывающий на достижение угловой скорости предельно допустимого значения ωмакс.
В тех случаях, когда угловая скорость ωi вала 34 становится меньше заданного допуска, равного ωмин, длительности измерительных циклов Тхстановятся достаточными для заполнения каждого из счетчиков 38 преобразователей 2-1, 2-2 до уровня, соответствующего половине кодовой установки 2 Nмин задатчика 19. Уменьшение угловой скорости обнаруживается блоком 17, который передает сигналы несравнения кодов на суммирующий вход счетчика 23. По его заполнению включается триггер 26, формируя единичный сигнал на выходе 30 сигнализатора.
Счетчик 24 предназначен в основном для разблокирования схемных элементов 22, 23, 27 в тех случаях, когда выбег угловой скорости за пределы установленного допуска носит единичный характер, т. е. фиксируется по каким-либо причинам на одном-двух периодах входных сигналов F1x, F2x и не подтверждается последующими измерениями ее текущих значений.
Таким образом, в предлагаемом сигнализаторе схема n-кратного подтверждения выбега угловой скорости за пределы установленного допуска работает в ждущем режиме и включается после первого же срабатывания пороговых элементов, анализирующих измерительную информацию по окончанию каждого из периодов Тх входных сигналов F1x, F2x. Это позволило в 2-3 раза повысить быстродействие сигнализатора и довести время его реакции на возникновение аварийной ситуации до 1-2 мс при частоте Fx, равной 4-2 кГц.
Кроме того, в этом сигнализаторе повышена точность измерения текущих значений угловой скорости, поскольку на результаты сравнения кодов N1i, N2i с уставками 2Nмакс и 2Nмин не сказывается флуктуация входных сигналов F1x, F2x, вызванная биением вала 34 и соответственно закрепленного на нем диска 32. Действительно, окружная скорость Viмагнитных вставок 33-1 . . . 33-Z, с которой они перемещаются относительно любого из датчиков 1-1, 1-2, не является постоянной величиной (даже при ωi= const), а зависит от амплитуды биения вала 34 и расположения ее вектора относительно оси этих датчиков:
Vi= π (D+ Δ cos ϕi) ωi , (6) где D - внешний диаметр магнитных вставок 33;
Δ- амплитуда биения вала 34;
ϕi - угол поворота вектора амплитуды Δ относительно оси датчиков 1-1, 1-2.
Следует отметить, что с увеличением числа Z магнитных вставок и соответственно уменьшением длительности периодов Тх, погрешность измерения текущих значений угловой скорости, вызванная биением вала, для каждого из датчиков 1-1 и 1-2 в отдельности возрастает. Данное обстоятельство ограничивает быстродействие известных устройств, т. к. не позволяет существенно увеличить число магнитных вставок без внесения дополнительной погрешности измерения ωi. В предлагаемом сигнализаторе датчики 1-1 и 1-2 расположены симметрично центра вала 34, и поэтому флуктуация возбуждаемых ими частотных сигналов F1x, F2x находится в противофазе по отношению друг к другу. Для того, чтобы полностью исключить ее влияние на точность измерения ωi практически при любом допустимом числе магнитных вставок достаточно просуммировать информационные коды N1i и N2i (либо вычислить их среднее арифметическое значение), что и реализовано в рассматриваемом сигнализаторе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система регулирования скорости центробежного аппарата | 1983 |
|
SU1176302A1 |
| СПОСОБ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334198C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ СКОРОСТИ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1992 |
|
RU2032179C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕМНОГО РАСХОДА ЖИДКОСТИ | 1991 |
|
RU2012848C1 |
| Устройство для регулирования расхода | 1986 |
|
SU1377832A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 1992 |
|
RU2072548C1 |
| АНАЛИЗАТОР НАПРЯЖЕНИЯ | 1990 |
|
RU2024880C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ОСЕВОГО ПЕРЕМЕЩЕНИЯ ВАЛА | 1996 |
|
RU2129212C1 |
| Устройство для регулирования давления | 1988 |
|
SU1674075A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085755C1 |
Изобретение относится к измерительной технике и может быть использовано в системах автоматического контроля предельных значений угловой скорости различных объектов повышенного быстродействия и высокой точности. Сущность изобретения: сигнализатор содержит 2 импульсных датчика угловой скорости (1 - 1, 1 - 2); 2 преобразователя частота - код (2 - 1, 2 - 2); 2 регистра (3, 4); 3 вычитателя кодов (5, 6, 7); 3 блока сравнения кодов (8, 16, 17), 1 блок постоянной памяти (9); 3 элемента И (10, 11, 12), 2 блока задержки (13, 14); 1 сумматор кодов (15); 2 задатчика предельных значений угловой скорости (18, 19); 2 ключа (20, 21); 3 счетчика импульсов (22, 23, 24); 3 RS-триггера (25, 26, 27); 1 элемент ИЛИ (28); (1 - 1) - (2 - 1) - 3 - 5 - 7 - 8 - 11 - 20 - 22 - 25; (1 - 2) - (2 - 2) - 4 - 6 -7; (2 - 2) - 15 - 17 - 21 -23; (2 - 1) - 10 - 13 - 11; (2 - 1) - 15 - 16 - 20; 13 - 12 - 24 - 22; 24 - 14 - 27 - 12; 24 - 23 - 26; (2 - 2) -5; (2 - 2) - 6; (2 - 2) - 10; 9 - 8; 20 - 28; 21 - 28; 28 - 27; 18 -16; 11 - 21; 13 - 3; 13 - 4; 19 - 17. 4 ил.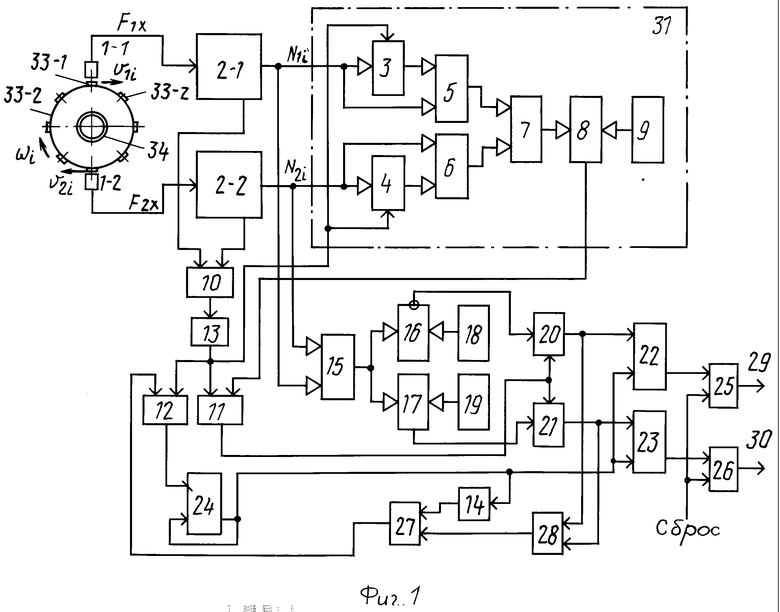
СИГНАЛИЗАТОР ПРЕДЕЛЬНЫХ ЗНАЧЕНИЙ УГЛОВОЙ СКОРОСТИ, содержащий два импульсных датчика угловой скорости, расположенных симметрично оси контролируемого вала, два задатчика предельных значений угловой скорости, три счетчика импульсов, три RS-триггера и два элемента задержки, при этом выходы переполнения первого и второго счетчиков импульсов соединены с установочными входами первого и второго RS-триггеров, отличающийся тем, что, с целью повышения быстродействия и точности, в него введены два преобразователя частота - код, два регистра, три вычитателя кодов, сумматор кодов, три блока сравнения кодов, блок постоянной памяти, три элемента И, два ключа и элемент ИЛИ, при этом выход первого импульсного датчика угловой скорости соединен с входом первого преобразователя частота - код, информационный выход которого соединен с первым входом сумматора кодов и первым входом первого вычитателя кодов, через первый регистр - с вторым входом первого вычитателя кодов, выход которого соединен с первым входом третьего вычитателя кодов, выход второго импульсного датчика угловой скорости соединен с входом второго преобразователя частота - код, информационный выход которого соединен с вторым входом сумматора кодов и первым входом второго вычитателя кодов, через второй регистр - с вторым входом второго вычитателя кодов, выход которого соединен с вторым входом третьего вычитателя кодов, выход третьего вычитателя кодов подключен к первому входу первого блока сравнения, к второму входу которого подключен выход блока постоянной памяти, выход сумматора кодов соединен с первыми входами второго и третьего блоков сравнения кодов, второй вход второго блока сравнения кодов подключен к выходу первого задатчика предельных значений угловой скорости, а второй вход третьего блока сравнения кодов подключен к выходу второго задатчика предельных значений угловой скорости, выход второго блока сравнения кодов через первый ключ соединен с суммирующим входом первого счетчика импульсов и первым входом элемента ИЛИ, а выход третьего блока сравнения кодов через второй ключ - с суммирующим входом второго счетчика импульсов и вторым входом элемента ИЛИ, выход которого подключен к установочному входу третьего RS-триггера, тактовый выход первого преобразователя частота - код подключен к первому входу первого элемента И, а тактовый выход второго преобразователя частота - код - к второму входу первого элемента И, выход которого через первый элемент задержки подключен к первым входам второго и третьего элементов И и к входам управления записью регистров, второй вход второго элемента И соединен с выходом первого блока сравнения кодов, а его выход - с входами управления ключей, второй вход третьего элемента И подключен к выходу третьего RS-триггера, а его выход - к счетному входу третьего счетчика импульсов, выходом переполнения подключенного к выходам обнуления первого и второго счетчиков импульсов, к своему входу обнуления и через второй элемент задержки - к входу установки в "0" третьего RS-триггера, а выходы первого и второго RS-триггеров являются выходами сигнализатора.

