Область техники, к которой относится изобретение
Настоящее изобретение относится к технологии интеллектуальной антенной решетки, используемой в сотовой мобильной системе передачи данных, и в частности, к способу, который позволяет улучшить зону обслуживания интеллектуальной антенной решетки.
Уровень техники
В сотовой мобильной системе передачи данных при использовании интеллектуальной антенной решетки ее обычно устанавливают на базовой радиостанции. В интеллектуальной антенной решетке могут использоваться два способа формирования диаграммы направленности для передачи и приема сигналов: один способ представляет собой формирование фиксированной диаграммы направленности, в то время как другой является способом динамического формирования диаграммы направленности. Способ формирования фиксированной диаграммы направленности, такой как диаграмма с круговой направленностью, диаграмма с полосовой направленностью или диаграмма с секторной направленностью, в основном, используют для передачи информации во все направления, например, при вещательных передачах, передаче пейджинговых сообщений и т.д. Динамическое формирование диаграммы направленности, в основном, используют для отслеживания абонентов и передачи данных абонента и сигнальной информации для конкретного пользователя.
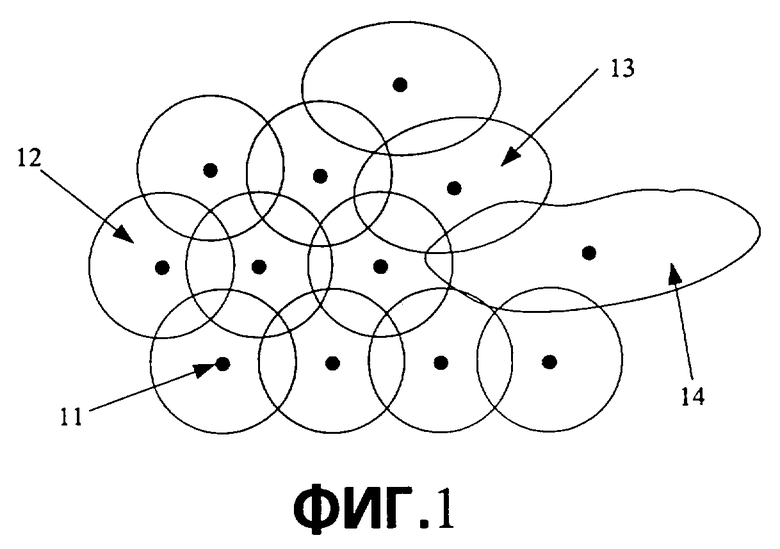
На фиг.1 изображена схема распределения ячеек в сети сотовой мобильной связи. При разработке системы сотовой мобильной связи, прежде всего, требуется учитывать проблему зоны обслуживания. Обычно интеллектуальную антенную решетку беспроводной базовой станции размещают в центре ячейки, как показано черной точкой 11 на фиг.1. Большинство ячеек имеет нормальную круглую зону обслуживания, такую как отмечена цифрой 12. Часть ячеек имеет зону обслуживания в виде несимметричного круга, как отмечено цифрой 13, и зону обслуживания в виде полосы, как показано цифрой 14. Нормальная зона обслуживания 12 круглой формы, зона обслуживания 13 в виде несимметричного круга и зона обслуживания 14 в виде полосы перекрываются, образуя общую зону обслуживания без зазоров между ячейками.
Как хорошо известно, диаграмма излучения мощности антенной решетки определяется такими параметрами, как геометрическая компоновка антенных элементов антенной решетки, характеристика каждого антенного элемента, фаза и амплитуда уровня излучения каждой антенного элемента и т.д. Для обеспечения возможности широкого применения конструкции разработку антенной решетки производят в относительно идеальных условиях, которые включают условия излучения в свободном пространстве, нормальную работу оборудования и т.д. Когда разработанную антенную решетку устанавливают для практической эксплуатации, реальная зона обслуживания антенной решетки может существенно изменяться в зависимости от различных мест установки антенны и положения, различного ландшафта и свойств поверхности Земли, различной высоты зданий и различных компоновок антенных элементов и т.д.
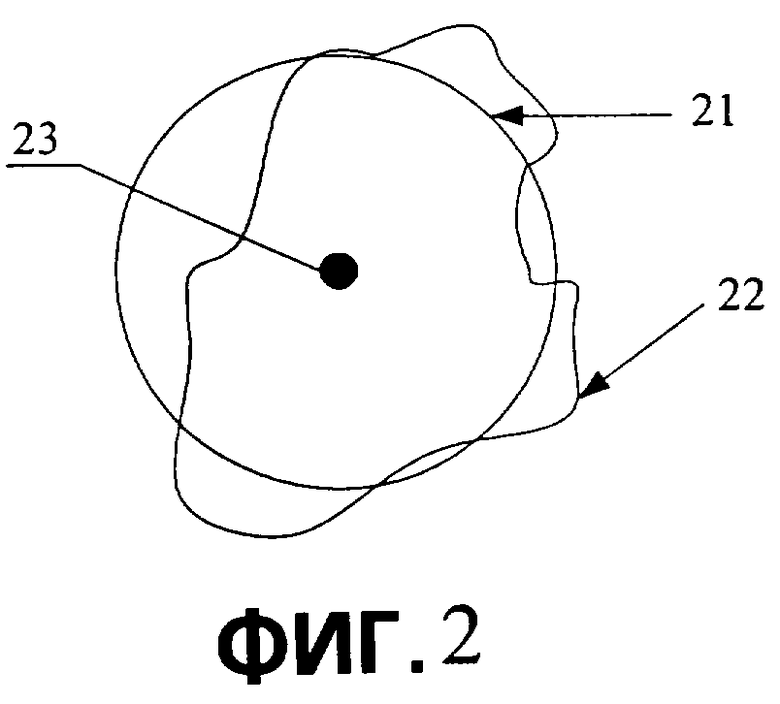
На фиг.2 (представляющей часть изображения по фиг.1) показано отличие расчетной зоны 21 обслуживания (нормальный круг) и реальной зоны 22 обслуживания из-за влияния ландшафта и свойств поверхности Земли и т.д. Реальная зона обслуживания может быть определена на месте. При этом возможно, что в каждой ячейке будут свои различия, так, что без выполнения регулировок на месте реальная зона обслуживания мобильной сети связи может быть очень плохой. Кроме того, требуется производить реконфигурирование антенной решетки в случаях, когда отдельные антенные элементы антенной решетки не обеспечивают нормальную работу или к этому времени изменились требования к конфигурации зоны обслуживания. В связи с этим требуется выполнять регулировку зоны обслуживания антенной решетки в реальном масштабе времени.
Принцип регулировки состоит в следующем: на основании способа формирования фиксированной диаграммы направленности для обеспечения круговой направленности в зоне обслуживания ячейки в интеллектуальной антенной решетке осуществляется динамическое формирование диаграммы направленности (динамическое направленное излучение) для отдельного абонента.
В формуле (1): А (ϕ) представляет параметр формы расчетного формирования диаграммы направленности, то есть, требуемой зоны обслуживания, где ϕ представляет угол полярных координат для наблюдаемой точки, и А (ϕ) представляет уровень излучения в направлении ϕ на том же расстоянии. Предположим, что имеется N антенн, работающих в интеллектуальной антенной решетке, в которой любая антенна n имеет параметр D(n) положения, параметр W(n) формирования диаграммы направленности и мощность Р излучения для направления угла ϕ, тогда реальная зона обслуживания будет представлена формулой (2):

в которой форма функции f(ϕ, D(n)) связана с типом интеллектуальной антенной решетки.
В наземной мобильной системе связи обычно достаточно учитывать двухмерную зону обслуживания на плоскости. С точки зрения компоновки существуют линейная антенная решетка и кольцевая антенная решетка, и круговая антенная решетка может рассматриваться как специальный случай кольцевой антенной решетки (см. патент КНР 97202038.1 "Кольцевая интеллектуальная антенная решетка, используемая для системы радиосвязи"). В сотовой мобильной системе связи для формирования секторной зоны обслуживания обычно используют линейную антенную решетку, а когда требуется сформировать круговую зону обслуживания, используют круговую антенную решетку. В настоящем изобретении в качестве примера используется круговая антенная решетка.
Предположим, что используется круговая антенная решетка, тогда D(n)=2×(n-1)×π/N;
f(ϕ, D(n))=exp (j×2×r/λ×π×cos (Ф-D{n)) (требуется найти экспоненту)
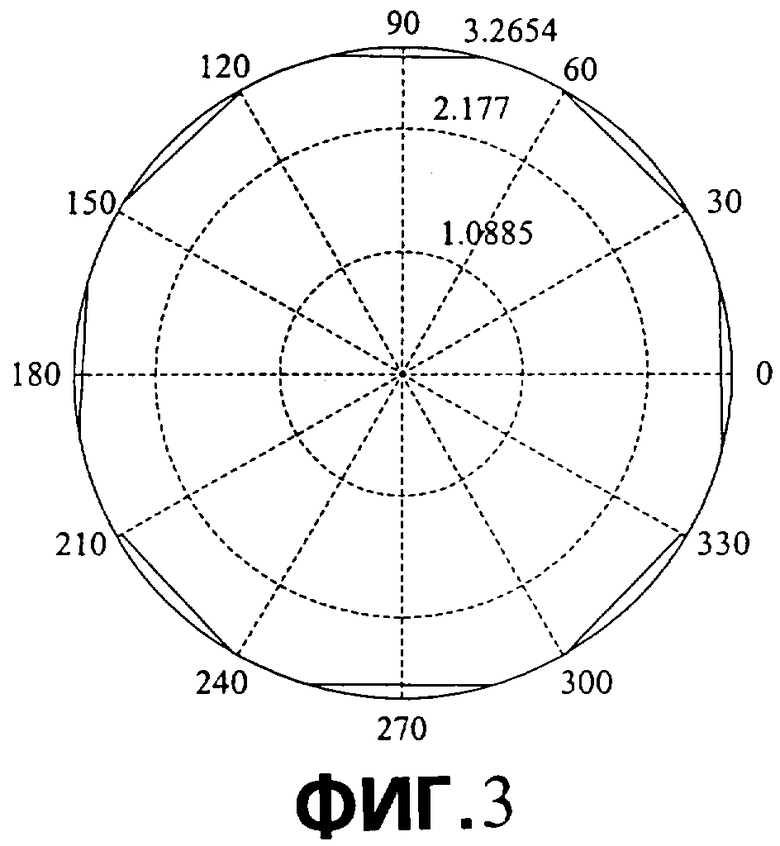
где r - радиус круговой антенной решетки, λ - рабочая длина волны. На фиг.3 изображена диаграмма направленности мощности при формировании круговой диаграммы направленности для нормальной круглой антенной решетки с 8 антеннами. Квадраты чисел 1,0885, 2,177, 3,2654, показанные на фиг.3, представляют уровни мощности.
При использовании алгоритма минимальной среднеквадратической ошибки средняя квадратичная ошибка ε в формуле (3) будет минимальной:

В формуле (3): К представляет собой количество точек отбора при использовании алгоритма аппроксимации; и C(i) - весовой коэффициент. Для некоторых точек, если требуется обеспечить высокую точность аппроксимации, устанавливают большое значение C(i), в других случаях значение C(i) устанавливают меньшим. Когда требуемая степень аппроксимации для всех точек совпадает, устанавливают общее значение C(i), равное 1.
Кроме того, учитывая, что мощность передачи каждого антенного элемента ограничена, если использовать амплитуду W(n) для представления мощности излучения антенного элемента, и при установке максимальной мощности передачи каждого антенного элемента Т(n) условие ограничения может быть выражено следующим образом:

Очевидно, что найти оптимальное значение мощности передачи в пределах, установленных для каждого антенного элемента, в общем, можно только путем выбора и полного использования неиспользованной точности определения W(n), за исключением некоторых специальных ситуаций, решение в которых может быть найдено непосредственно с помощью формулы. Тем не менее, при использовании для поиска решения способа перебора объем вычислений будет существенно большим и имеет экспоненциальную зависимость от количества антенных элементов N. Хотя объем вычислений можно уменьшить при использовании способа постепенного повышения точности и уменьшения объема значений, для которых производится поиск решений, но даже только для того, чтобы найти решение, приближающееся к оптимальному значению, объем вычислений все еще остается слишком большим.
Сущность изобретения
Для эффективного улучшения зоны обслуживания интеллектуальной антенной решетки был разработан способ улучшения зоны обслуживания интеллектуальной антенной решетки. Улучшение включает приближение реальной зоны обслуживания антенной решетки к расчетной зоне обслуживания; а также, в случае, когда часть антенных элементов отключают из-за неполадок, для быстрого восстановления зоны обслуживания антенны параметры излучения других нормально работающих антенных элементов могут быть немедленно отрегулированы.
Настоящее изобретение направлено на способ, который позволяет регулировать параметры антенных элементов антенной решетки в соответствии с практической необходимостью. С использованием этого способа антенная решетка позволяет удовлетворять конкретным требованиям формирования диаграммы направленности, и позволяет находить быстрое решение для определения оптимальной величины излучаемой мощности для каждого антенного элемента в установленных пределах для достижения эффекта локальной оптимизации.
Способ в соответствии с настоящим изобретением представляет собой разновидность способа цифровой обработки сигнала в полосе частот модуляции. Способ позволяет изменять размер и форму зоны обслуживания интеллектуальной антенной решетки путем регулирования параметра каждой антенны (исключая отключенные антенны), входящей в состав интеллектуальной антенной решетки, для достижения локального эффекта оптимизации в соответствии с требованиями, с использованием критерия минимальной среднеквадратической ошибки. Схема конкретной регулировки состоит в том, что на основании отличий размера и формы зоны обслуживания между требуемой расчетной и реализованной в действительности зоной обслуживания регулируют параметры излучения антенны с использованием способа пошаговой аппроксимации на основе критерия минимальной среднеквадратической ошибки для приближения действительной зоны обслуживания антенной решетки требованиям условия локальной оптимизации.
В соответствии с настоящим изобретением, регулирование параметров W(n) формирования диаграммы направленности для каждого антенного элемента n для антенной решетки N, в соответствии с реально возникшей ситуацией, дополнительно содержит:
А. Установку точности W(n), с которой производится поиск решений, то есть, регулировку длины шага.
В. Установку исходных значений включающих: исходное значение W0(n) параметра W(n) формирования диаграммы направленности для антенного элемента n; исходное значение ε0 минимальной среднеквадратической ошибки ε; переменную подсчета для записи минимального количества регулировок; пороговое значение М окончания регулировки и максимальную амплитуду Т(n) мощности излучения для антенного элемента n.
С. Начало цикла для регулировки W(n), который содержит: генерирование случайного числа; определение изменения W(n) для установленной длины шага и вычисление нового значения W(n); при определении, что абсолютное значение W(n) меньше или равно Т(n)1/2, вычисление минимальной среднеквадратической ошибки ε; когда ε больше или равно ε0, сохранение этого значения ε и увеличение переменной подсчета на 1.
D. Повторение этапа С до тех пор, пока переменная подсчета не станет большей или равной пороговому значению М, затем окончание процедуры регулировки и получение результата; запись и сохранение конечного результата W(n), замена ε0 новым значением ε.
При сравнении значений ε и ε0 на этапе С, если ε меньше, чем ε0, то записывают и сохраняют результат W(n) вычислений этой регулировки, ε0 заменяют новым вычисленным значением ε, и переменную подсчета сбрасывают в ноль.
Длина шага регулировки может быть фиксированной или переменной. В случае, когда используется переменная длина шага регулировки, в установку исходных значений также входит установка минимальной длины шага регулировки. При этом, когда переменная подсчета будет больше или равна пороговому значению М, но длина шага регулировки не будет равна минимальной длине шага регулировки, длину шага регулировки продолжают уменьшать, и процедуру регулировки W(n) продолжают.
Условия окончания процедуры регулировки дополнительно включают предварительную установку порогового значения ε’ окончания регулировки, и когда ε<ε’, регулировку заканчивают.
Количество исходных значений W0(n) связано с количеством антенных элементов, из которых состоит интеллектуальная антенная решетка.
При установке исходного значения W0(n) для W(n) W0(n) устанавливают в ноль для выключенных антенных элементов интеллектуальной антенной решетки, и W(n) для выключенных антенных элементов в последующем цикле регулировки не регулируют.
Минимальное значение среднеквадратической ошибки ε вычисляют по формуле:

в которой P(ϕi) представляет мощность излучения антенного элемента, когда параметр формирования диаграммы направленности антенного элемента равен W(n), и угол направления равен ϕ, и параметр P(ϕi) связан с типом антенной решетки; A(ϕi) представляет уровень излучения в направлении ϕ на равном расстоянии, и когда ожидаемая точка наблюдения имеет фазу ϕ для полярных координат; К количество точек отбора при использовании приближенного способа и C(i) - весовой коэффициент.
Установка точности W(n), поиск решения которого производится, то есть, длины шага регулировки, содержит:
установку шагового изменения действительной части и мнимой части комплексного числа W(n), соответственно; или установку шагового изменения амплитуды и фазы для полярных координат W(n), соответственно;
при использовании шагового изменения действительной части и мнимой части комплексного числа W(n) новые значения W(n) вычисляют по формуле:

где ΔIU(n) и ΔQU(n) представляют длину шага регулировки действительной части IU(n) и мнимой части QU(n), соответственно;  определяют направление регулировки действительной части IU(n) и мнимой части QU(n), соответственно; их величины определяются с помощью генерируемого случайного числа;
определяют направление регулировки действительной части IU(n) и мнимой части QU(n), соответственно; их величины определяются с помощью генерируемого случайного числа;
при использовании шагового изменения амплитуды и фазы для полярных координат W(n) новое значение W(n) вычисляют по формуле:

где ΔАU(n) и ΔϕU(n) представляют длину шага регулировки амплитуды АU(n) и фазы ϕU(n), соответственно;  определяют направление регулировки амплитуды АU(n) и фазы ϕU(n), соответственно, их значение определяют по генерируемого случайному числу; U представляет U-ю регулировку, и U+1 представляет следующую регулировку.
определяют направление регулировки амплитуды АU(n) и фазы ϕU(n), соответственно, их значение определяют по генерируемого случайному числу; U представляет U-ю регулировку, и U+1 представляет следующую регулировку.
Способ, в соответствии с настоящим изобретением, относится к случаю, когда на базовой радиостанции используют интеллектуальную антенную решетку для формирования фиксированной диаграммы направленности с круговой направленностью, при этом зона обслуживания интеллектуальной антенной решетки может быть эффективно улучшена. Размер и форму зоны обслуживания интеллектуальной антенной решетки изменяют путем регулировки параметра каждого антенного элемента антенной решетки для получения локального оптимального эффекта совпадения требований при использовании критерия минимальной среднеквадратической ошибки.
Способ, в соответствии с настоящим изобретением, состоит в том, что на основании разности размера и формы между требуемой зоной обслуживания, определенной в результате инженерных расчетов, и в действительности реализованной зоной обслуживания, регулируют параметры излучения антенны с помощью способа пошаговой аппроксимации, при использовании критерия минимальной среднеквадратической ошибки для того, чтобы приблизить зону действительного обслуживания антенной решетки к требуемому виду при условиях локальной оптимизации.
Один из вариантов применения способа состоит в использовании его при установке интеллектуальной антенной решетки на месте, где размер и форма зоны обслуживания интеллектуальной антенной решетки можно изменять путем регулировки параметров каждого антенного элемента интеллектуальной антенной решетки для получения круговой диаграммы направленности, которая в большой степени приближается к расчетной форме диаграммы направленности, что является результатом локальной оптимизации. Другой вариант применения способа состоит в том, что, когда часть антенных элементов в интеллектуальной антенной решетке, не обеспечивающих нормальную работу, была отключена, параметры излучения остальных нормально работающих антенных элементов можно немедленно отрегулировать с помощью данного способа для немедленного восстановления зоны обслуживания с круговой диаграммой направленности в ячейке.
Перечень фигур чертежей
На фиг.1 изображена схема распределения ячеек сотовой сети мобильной связи.
На фиг.2 изображена схема, представляющая различие между требуемой зоной обслуживания ячейки и реальной зоной обслуживания ячейки.
На фиг.3 изображена диаграмма направленности мощности с круговой направленностью антенной решетки с восемью антенными элементами, обеспечивающей нормальную круговую зону обслуживания.
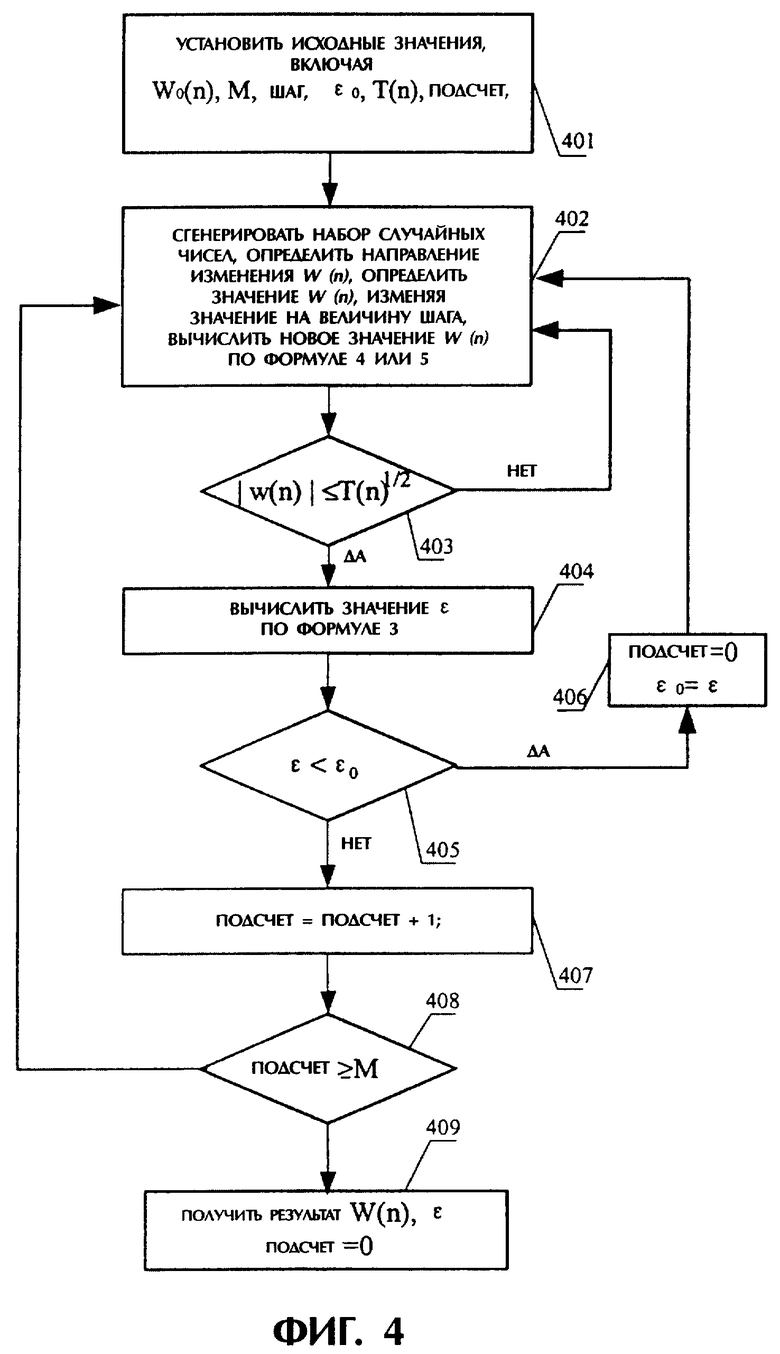
На фиг.4 изображен алгоритм быстрого улучшения зоны обслуживания путем формирования диаграммы направленности антенной решетки с фиксированной длиной шага.
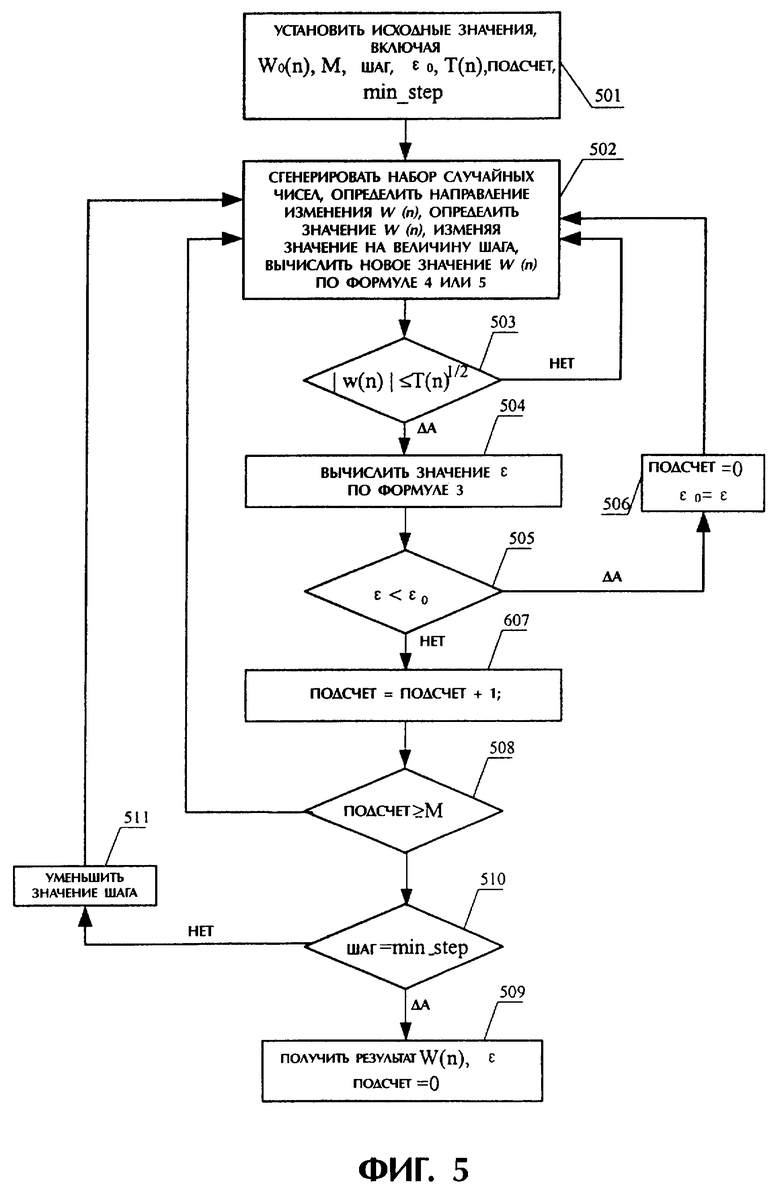
На фиг.5 изображен алгоритм быстрого улучшения зоны обслуживания путем формирования диаграммы направленности антенной решетки с переменной длиной шага.
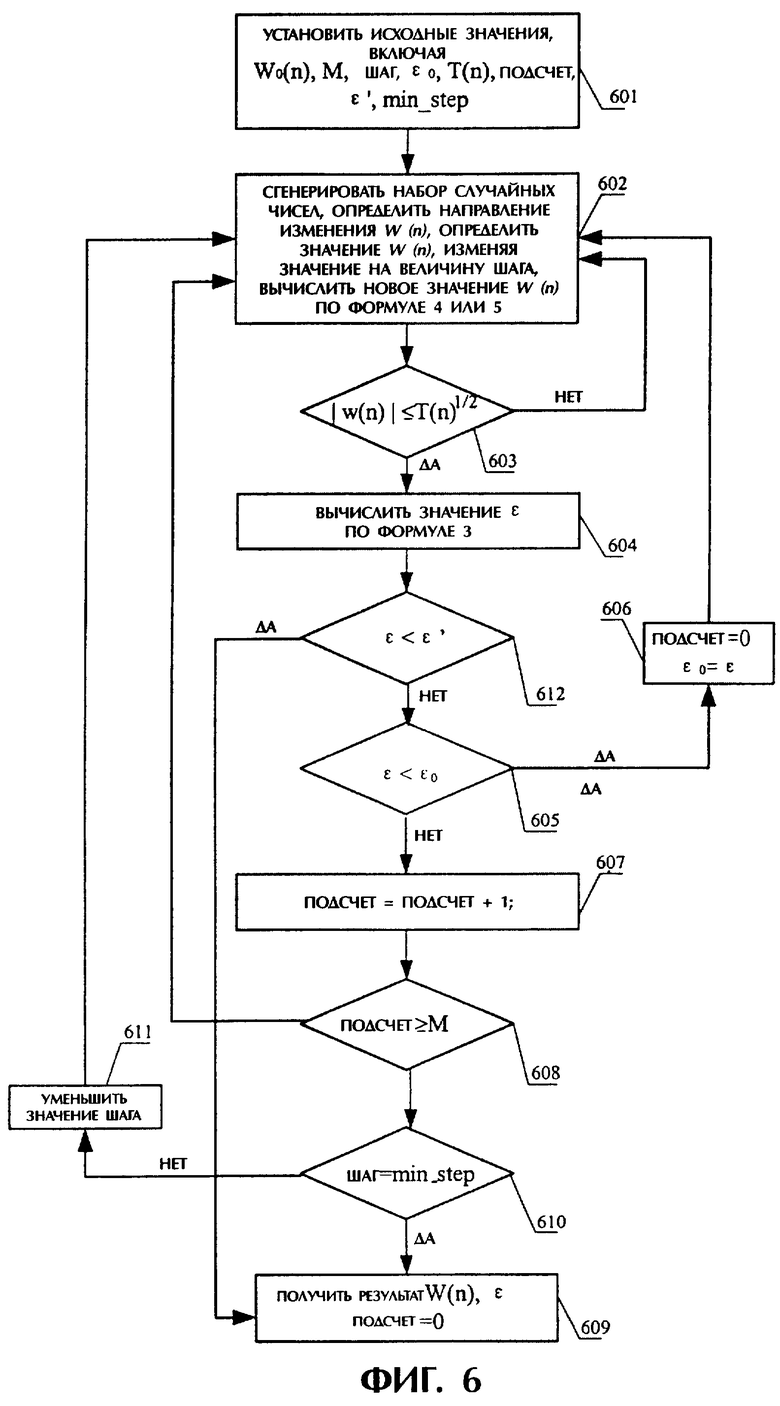
На фиг.6 изображен алгоритм, содержащий условия окончания для быстрого улучшения зоны обслуживания путем формирования диаграммы направленности антенной решетки с переменной длиной шага.
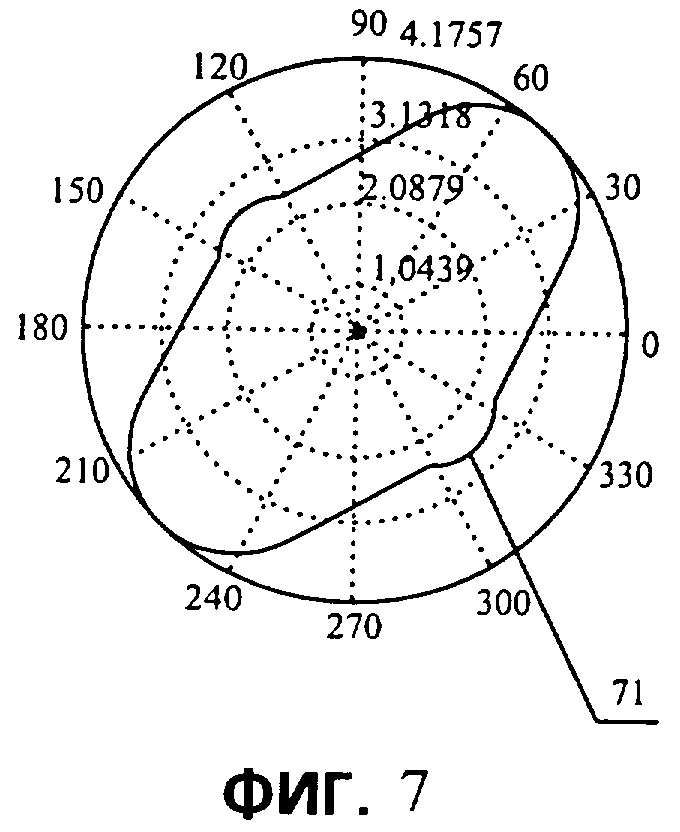
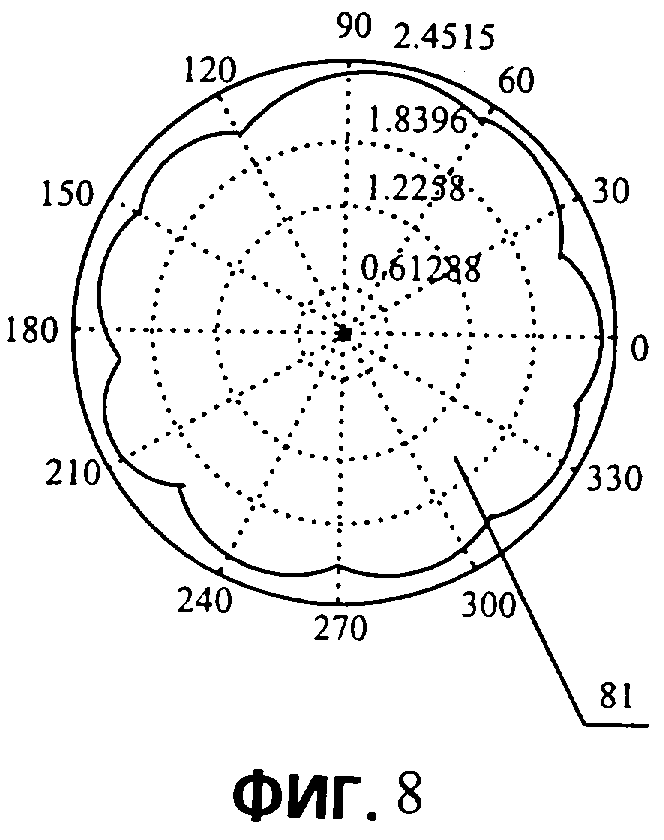
На фиг.7 и фиг.8 изображены диаграммы направленности мощности перед регулировкой и после регулировки, соответственно, для антенной решетки с восемью антенными элементами, обеспечивающей нормальную круговую зону обслуживания, когда один из элементов антенны не обеспечивает нормальную работу.
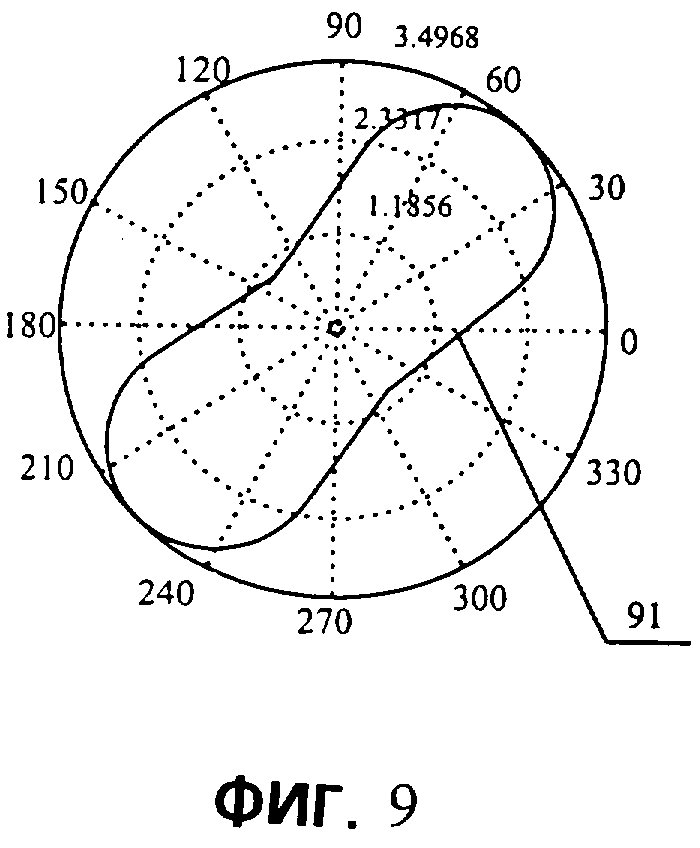
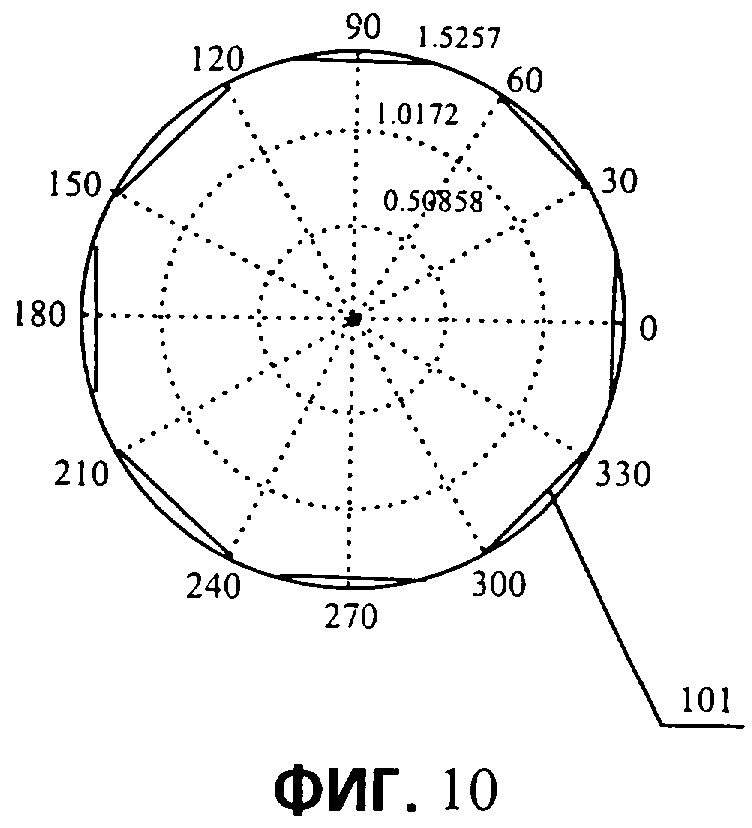
На фиг.9 и фиг.10 изображены диаграммы направленности мощности перед регулировкой и после регулировки, соответственно, для антенной решетки с восемью антенными элементами, обеспечивающей нормальную круговую зону обслуживания, когда два элемента антенны не обеспечивают нормальный режим работы.
Сведения, подтверждающие возможность осуществления изобретения
Настоящее изобретение будет более полно описано ниже со ссылкой на прилагаемые чертежи, на которых представлены предпочтительные варианты воплощения настоящего изобретения. Настоящее изобретение, однако, может быть воплощено в множестве различных форм и его не следует рассматривать как ограниченное описанными здесь вариантами воплощения; эти варианты воплощения приведены для полноты и завершенности описания и полностью передают объем настоящего изобретения для специалистов в данной области техники. Во всем описании одинаковыми номерами обозначены одинаковые элементы.
Фиг.1-фиг.3 были описаны выше, и их описание здесь не будет повторяться.
Рассмотрим фиг.4, фиг.5 и фиг.6. Настоящее изобретение относится к способу, позволяющему быстро находить решение в пределах ограниченного объема значений оптимизации параметра W(n) формирования диаграммы направленности для любого антенного элемента n в антенной решетке для обеспечения местного эффекта оптимизации. Этот способ вкратце включает следующие пять этапов:
Этап 1
Установить точность W(n), решение которого надо найти, то есть, регулировку длины шага W(n) для всей процедуры поиска решения. Существует два типа способов установки длины шага регулировки: один из них состоит в установке, соответственно, действительной части и мнимой части W(n) в комплексном числе и изменяется за этап; другой состоит в установке, соответственно, амплитуды и угла W(n) в полярных координатах и изменяется за этап.
Предположим, что после U-й регулировки W(n) примет значение WU(n).
При использовании первого способа регулировки WU(n) выражается в виде комплексного числа: WU(n)=IU(n)+j×QU(n). После следующей регулировки параметр WU+1(n) может быть выражен в следующем виде (формула 4):

где ΔIU(n) и ΔQU(n) представляют собой длины шага регулировки действительной части IU(n) и мнимой части QU(n), соответственно;  определяют направление регулировки действительной части IU(n) и мнимой части QU(n), соответственно; причем их значения будут определяться способом принятия случайного решения на этапе 2.
определяют направление регулировки действительной части IU(n) и мнимой части QU(n), соответственно; причем их значения будут определяться способом принятия случайного решения на этапе 2.
При использовании второго способа регулировки WU(n) выражают в полярных координатах:  . После следующей регулировки параметр WU+1(n) может быть выражен в следующем виде (формула 5):
. После следующей регулировки параметр WU+1(n) может быть выражен в следующем виде (формула 5):

где ΔАU(n) и ΔϕU(n) представляют длину шага регулировки амплитуды АU(n) и фазы ϕU(n), соответственно;  определяют направление регулировки амплитуды АU(n) и фазы ϕU(n), соответственно, причем их значение определяется с помощью способа принятия случайного решения на этапе 3.
определяют направление регулировки амплитуды АU(n) и фазы ϕU(n), соответственно, причем их значение определяется с помощью способа принятия случайного решения на этапе 3.
Этап 2
Установить исходное значение W0(n) для параметра W(n), который удовлетворяет условию 1 ограничения:  , причем количество W0(n) связано с количеством N антенных элементов антенной решетки. Для отключенных антенных элементов значения W0(n) должны быть равны нулю, и они не будут регулироваться в последующих этапах. Выбор исходного значения W0(n) имеет определенную степень влияния на скорость схождения алгоритма и конечный результат. Если приблизительный диапазон W(n) известен заранее, то лучше выбирать набор значений W0(n), соответствующих этому диапазону, и это также приведет к повышению точности результата.
, причем количество W0(n) связано с количеством N антенных элементов антенной решетки. Для отключенных антенных элементов значения W0(n) должны быть равны нулю, и они не будут регулироваться в последующих этапах. Выбор исходного значения W0(n) имеет определенную степень влияния на скорость схождения алгоритма и конечный результат. Если приблизительный диапазон W(n) известен заранее, то лучше выбирать набор значений W0(n), соответствующих этому диапазону, и это также приведет к повышению точности результата.
Затем установить исходное значение ε0 минимальной среднеквадратической ошибки ε для того, чтобы быстрее ввести регулировку в цикле, в целом, исходное значение ε0 устанавливают с более высоким значением и переменную подсчета ("подсчет") устанавливают равной 0. "Подсчет" используют для записи минимального количества регулировок, необходимых, чтобы привести значение W(n) на уровень ниже ε0, соответствующего набору W0(n). М представляет требуемое пороговое значение, используемое для принятия решения об окончании регулировки и выводе результата. Очевидно, что чем больше значение М, тем больше надежность полученного результата.
Процедуры установки исходного значения, указанные выше, показаны в блоках 401, 501 и 601 на фиг.4, 5 и 6, соответственно. Они включают следующие установки: W0(n), М, длины шага регулировки ("шаг"), исходного значения минимальной среднеквадратической ошибки εo, максимальной мощности передачи n-той антенны Т(n) и переменной подсчета ("подсчет"). Разница между блоками 501, 601 и блоком 401 состоит в том, что блоки 501, 601 дополнительно включают установку минимальной длины шага регулировки (минимальный шаг), которая необходима для использования в регулировке с переменной длиной шага.
Этап 3
С помощью процедуры, описанной в этапе 1 и формул (4) или (5), получают новое значение W(n), то есть, производят регулировку W(n). Каждый раз, когда генерируется набор случайных чисел, то в соответствии со случайным числом, принимается решение об изменении направления W(n). Если после регулировки W(n) нарушает пределы условия 1  , то к W(n) добавляют или от него вычитают некоторую величину, определяемую с помощью регулировки длины шага ("шаг"). Поскольку в этот момент правильная тенденция изменения не известна, то принимается некоторая вероятность прибавления и некоторая вероятность вычитания. Операция, выполняемая на этапе 3, показана в блоках 402, 403, 502, 503 или 602, 603 на фиг.4, 5 или 6, соответственно.
, то к W(n) добавляют или от него вычитают некоторую величину, определяемую с помощью регулировки длины шага ("шаг"). Поскольку в этот момент правильная тенденция изменения не известна, то принимается некоторая вероятность прибавления и некоторая вероятность вычитания. Операция, выполняемая на этапе 3, показана в блоках 402, 403, 502, 503 или 602, 603 на фиг.4, 5 или 6, соответственно.
Этап 4
После регулировки, если W(n) удовлетворяет условию 1 ограничения, вычисляют новое значение минимальной среднеквадратической ошибки ε по формуле 3. Если ε<ε0, то записывают и сохраняют значение W(n) для этой регулировки, ε0 заменяют на новое значение ε и переменную подсчета устанавливают в ноль (подсчет =0). Работа на этом этапе показана в блоках 404, 405, 406, 504, 505, 506 или 604, 605, 606 на фиг.4, 5 или 6, соответственно. На фиг.6 ε<ε’ представляет конечное условие регулировки так, что перед тем, как будет выполнено решение ε<ε0, вначале должно быть выполнено решение ε<ε’; когда ε больше, чем ε’, то выполняют решение ε<ε0, как показано в блоке 612. Если ε≥ε0, то это значение ε сохраняют, и увеличивают переменную подсчета (подсчет +1), эта операция показана в блоках 407, 507 или 607 на фиг.4, 5 или 6, соответственно. После того, как будет выполнено решение ε≥ε0, и будут выполнены блоки 407, 507 или 607, каждый раз следует проводить проверку переменной подсчета ("подсчет"), не превысило ли ее значение заранее установленное пороговое значение М, и эта операция показана в блоках 408, 508 или 608 на фиг.4, 5 или 6, соответственно.
Этап 5
Когда будет принято решение, что ε≥ε0, и "подсчет" меньше, чем заранее заданное пороговое значение М, процесс возвращается на этап 3, то есть вновь выполняются блоки 402, 502 или 602 по фиг.4, 5 или 6. Затем производится повторное генерирование набора случайных чисел; и вычисляют значение W(n+1), если был вычислен набор N(n), то вновь начинают работу со значения W(1). Вышеописанную процедуру повторяют до тех пор, пока не будет определено, что "подсчет" М в блоках 408, 508 или 608. Затем всю процедуру регулировки заканчивают. В этот момент записанное значение W(n) представляет собой набор оптимальных решений, ε0 представляет собой соответствующую минимальную среднеквадратическую ошибку, и переменную подсчета устанавливают в ноль (подсчет =0). Эта операция показана в блоках 409, 509 или 609.
Решение, полученное на этапах, описанных выше, представляет только решение локальной оптимизации, но требуемый объем вычислений при этом гораздо меньше, и быстро может быть получен набор решений. Если в этот момент полученное решение не удовлетворяет требованиям, то процедуру можно повторить, при этом может быть получено несколько наборов решений, и может быть получен набор решений с минимальной среднеквадратической ошибкой ε. Конечно, когда процедуру повторяют, исходное значение W0(n) из W(n) должно обновляться.
Если после этого все еще не удалось получить удовлетворительный результат, то можно использовать способы с переменной длиной шага и повышения точности для улучшения алгоритма, описанного выше, которые показаны на фиг.5 и 6. В блоках 501 или 601, во время установки исходных значений, устанавливают минимальную длину шага регулировки (минимальный шаг). В начале регулировки используют большую длину шага регулировки. В блоках 510 или 610, когда "подсчет" будет больше, чем М, но "шаг" больше, чем значение минимального шага, процедура вычислений не заканчивается, и выполняются блоки 511 или 611. Длина шага регулировки уменьшается в блоках 511 или 611, и производится изменение W(n) с уменьшенной длиной шага, после чего вновь производится вычисление минимальной среднеквадратической ошибки ε и так далее. Только когда значение "подсчет" будет больше, чем М, и "шаг" будет равен минимальному шагу (шаг = минимальный шаг), вычисления заканчиваются, результат выводится и получают набор W(n) и соответствующую среднеквадратическую ошибку ε. При тех же условиях точности использование алгоритма с переменной длиной шага, показанного на фиг.5 или 6, позволяет в некоторой степени увеличить скорость вычислений.
На фиг.6 показана процедура, в которой в системе установлены определенные требования в отношении среднеквадратической ошибки. Это выражено, как ε<ε’, где ε’ представляет заранее заданное пороговое значение. В этом случае условие окончания процедуры должно быть соответственно изменено, то есть, перед блоком 605 добавляют блок 612, и когда ε<ε’, процедура заканчивается. В варианте воплощения ε<ε’ может быть установлено как условие окончания при использовании алгоритма с фиксированной длиной шага (который показан на фиг.4) для быстрого улучшения формирования зоны обслуживания диаграммы направленности антенной решетки.
На фиг.7 и 8 представлен эффект применения настоящего изобретения путем сравнения двух диаграмм, при использовании, в качестве примера, круглой антенной решетки с восемью элементами, как показано на фиг.3 (настоящее изобретение соответствует любому типу антенной решетки и позволяет производить динамическое формирование диаграммы направленности в режиме реального времени, здесь круговая антенная решетка принята только в качестве примера). Когда антенный элемент (включая антенну, кабель питания и подключенный к ней высокочастотный передатчик и т.д.) антенной решетки не обеспечивает нормальную работу, базовая радиостанция должна отключить этот антенный элемент, и диаграмма излучения антенной решетки при этом значительно ухудшается. На фиг.7 показано, что, когда один из антенных элементов не обеспечивает нормальную работу, диаграмма излучения антенной решетки изменяется от идеального круга до кривой 71 неправильной формы, и зона обслуживания ячейки немедленно ухудшается. С помощью способа, в соответствии с настоящим изобретением, базовая станция получает параметры других нормально работающих антенных элементов и производит немедленную их регулировку путем изменения амплитуды и фазы подаваемого сигнала во все нормально работающие антенные элементы так, что получают зону обслуживания, представленную кривой 81, изображенной на фиг.8, которая имеет приблизительно круговую направленность.
На фиг.9 и 10 описан другой эффект применения настоящего изобретения путем сравнения двух диаграмм, в котором также используется круглая антенная решетка с восемью элементами, в качестве примера, которая показана на фиг.3 (настоящее изобретение применимо для любого типа антенной решетки и позволяет динамически осуществлять формирование диаграммы направленности в режиме реального времени, здесь круглая антенная решетка также использована только в качестве примера). Когда не работают два антенных элемента, разделенных промежутком π/4, как показано на фиг.3, диаграмма излучения антенной решетки изменяется с идеального круга и получает форму кривой 91 неправильной формы, при этом гораздо хуже обеспечивается зона обслуживания ячейки. Когда такое происходит, с помощью способа, в соответствии с настоящим изобретением, базовая радиостанция немедленно производит регулировку параметров других нормально работающих антенных элементов путем изменения амплитуды и фазы передаваемого сигнала во всех нормально работающих антенных элементах так, что будет получена зона обслуживания, представленная графом 101 на фиг.10, которая, очевидно, в гораздо большей степени приближена к круговой диаграмме направленности.
Следует отметить, что когда часть антенных элементов перестает работать без повышения максимальной мощности излучения нормально работающих антенных элементов, радиус всей зоны обслуживания несколько уменьшается, как показано на фиг.7 и фиг.9. Следовательно, уменьшается зона обслуживания ячейки (см. фиг.1) так, что могут возникнуть зоны отсутствия связи, как показано на примерах, изображенных на фиг.7 и фиг.9. На одинаковом расстоянии, при снижении уровня излучения мощности на 3~5 дБ, радиус зоны обслуживания уменьшится на 10%~20%. Поэтому, для того чтобы решить эту проблему, необходимо повысить мощность излучения части антенных элементов или использовать функцию "расширения" в соседних ячейках.
Способ улучшения зоны обслуживания антенной решетки состоит в процедуре регулировки параметров антенной решетки. При этом может быть быстро получено значение параметра W(n) формирования диаграммы направленности и может быть обеспечен хороший эффект локальной оптимизации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СВЧ-СПОСОБ ОПРЕДЕЛЕНИЯ ПОВЕРХНОСТНОЙ ВЛАЖНОСТИ ДИЭЛЕКТРИЧЕСКИХ ПОКРЫТИЙ НА МЕТАЛЛЕ И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ СПОСОБ | 2006 |
|
RU2338179C1 |
| СВЧ-СПОСОБ ИЗМЕРЕНИЯ ПОВЕРХНОСТНОЙ ВЛАЖНОСТИ ТВЕРДЫХ МАТЕРИАЛОВ, ВЛАЖНОСТИ ПО ОБЪЕМУ ВЗАИМОДЕЙСТВИЯ, НОРМАЛЬНОГО К ПОВЕРХНОСТИ ГРАДИЕНТА ВЛАЖНОСТИ, И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2294533C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРИХОДА РАДИОСИГНАЛА | 2021 |
|
RU2787952C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПРИЕМА ДАННЫХ В СИСТЕМЕ МОБИЛЬНОЙ СВЯЗИ, ИСПОЛЬЗУЮЩЕЙ СХЕМУ АДАПТИВНОЙ АНТЕННОЙ РЕШЕТКИ | 2004 |
|
RU2313907C2 |
| СПОСОБ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ ДВУХКОЛЬЦЕВОЙ ЦИФРОВОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2014 |
|
RU2573715C1 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| Способ формирования диаграммы направленности приемной цифровой антенной решетки | 2021 |
|
RU2769087C1 |
| СПОСОБ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ МНОГОЛУЧЕВОЙ АДАПТИВНОЙ АНТЕННОЙ РЕШЕТКИ С ИСПОЛЬЗОВАНИЕМ ПАРАМЕТРИЧЕСКОЙ МОДЕЛИ СПЕКТРА ПРОСТРАНСТВЕННЫХ ЧАСТОТ ВХОДНОГО СИГНАЛА | 2017 |
|
RU2650096C1 |
| УСТРОЙСТВО И СПОСОБ ПРИЕМА ДАННЫХ В СИСТЕМЕ МОБИЛЬНОЙ СВЯЗИ, ИСПОЛЬЗУЮЩЕЙ СХЕМУ АДАПТИВНОЙ АНТЕННОЙ РЕШЕТКИ | 2004 |
|
RU2320083C2 |
| СПОСОБ ВОЗБУЖДЕНИЯ АНТЕННЫ БАЗОВОЙ СТАНЦИИ ПОДВИЖНОЙ РАДИОСВЯЗИ | 2004 |
|
RU2265928C2 |
Настоящее изобретение относится к сотовой мобильной системе передачи данных. Технический результат заключается в ускорении определения оптимальной величины излучаемой мощности для каждого антенного элемента в установленных пределах для достижения эффекта локальной оптимизации с использованием критерия минимальной среднеквадратичной ошибки. Сущность изобретения состоит в следующем. Произвольное формирование диаграммы направленности антенной решетки может осуществляться путем регулировки параметра W(n) формирования диаграммы направленности для n элементов антенны на основании разницы в размере и форме между требуемой зоной обслуживания, полученной на основании инженерных расчетов, и реально реализованной зоной обслуживания. Процедура регулировки содержит установку точности W(n), то есть длины шага регулировки, установку набора исходных значений W0(n), исходного значения среднеквадратической ошибки ε0, установку переменной подсчета, установку порогового значения М окончания регулировки и максимальной мощности Т(n) излучения элемента антенны. С этими установками выполняют цикл регулировки W(n). Способ пошагового приближения используют для регулировки параметров излучения антенны на основании критерия минимальной среднеквадратической ошибки. 4 н. и 15 з.п. ф-лы, 10 ил.

где Р(φi) представляет мощность излучения антенного элемента, когда параметр формирования диаграммы направленности антенного элемента составляет W(n), угол направления составляет φ и параметр Р(φi) связан с типом антенной решетки, А(φi) представляет уровень излучения в направлении φ на равном расстоянии и когда ожидаемая точка наблюдения имеет фазу φ для полярных координат; К - количество точек отбора при использовании приближенного способа и C(i) весовой коэффициент.

где ΔIU (n) и ΔQU (n) представляют длину шага регулировки действительной части IU (n) и мнимой части QU (n), соответственно,  определяют направление регулировки действительной части IU(n) и мнимой части QU(n), соответственно, их величины определяются с помощью генерируемого случайного числа; при использовании шагового изменения амплитуды и фазы для полярных координат W(n) новое значение W(n) вычисляют по формуле
определяют направление регулировки действительной части IU(n) и мнимой части QU(n), соответственно, их величины определяются с помощью генерируемого случайного числа; при использовании шагового изменения амплитуды и фазы для полярных координат W(n) новое значение W(n) вычисляют по формуле

где ΔАU (n) и ΔφU (n) представляют длину шага регулировки амплитуды АU(n) и фазы φU(n), соответственно,  и определяют направление регулировки амплитуды АU(n) и фазы φU(n), соответственно, их значение определяют по генерируемому случайному числу, U представляет U-ю регулировку и U+1 представляет следующую регулировку.
и определяют направление регулировки амплитуды АU(n) и фазы φU(n), соответственно, их значение определяют по генерируемому случайному числу, U представляет U-ю регулировку и U+1 представляет следующую регулировку.

в которой Р(φi) представляет мощность излучения антенного элемента, когда параметр формирования диаграммы направленности антенного элемента равен W(n), угол направления равен φ, параметр Р(φi) связан с типом антенной решетки, А(φi) представляет уровень излучения в направлении φ при равном расстоянии, когда ожидаемая точка наблюдения имеет фазу φ для полярных координат, К - количество точек отбора при использовании приближенного способа и C(i) - весовой коэффициент.

в которой ΔIU(n) и ΔQU(n) представляют длину шага регулировки действительной части IU(n) и мнимой части QU(n), соответственно,  определяют направление регулировки действительной части IU(n) и мнимой части QU(n), соответственно, причем их величины определяются с помощью генерируемого случайного числа; при использовании шагового изменения амплитуды и фазы для полярных координат W(n) новое значение W(n) вычисляют по формуле:
определяют направление регулировки действительной части IU(n) и мнимой части QU(n), соответственно, причем их величины определяются с помощью генерируемого случайного числа; при использовании шагового изменения амплитуды и фазы для полярных координат W(n) новое значение W(n) вычисляют по формуле:

в которой ΔАU(n) и ΔφU(n) представляют длину шага регулировки амплитуды АU(n) и фазы φU(n), соответственно,  определяют направление регулировки амплитуды АU(n) и фазы φU(n), соответственно, причем их значение определяется по генерируемому случайному числу, значение U представляет U-ю регулировку и U+1 представляет следующую регулировку.
определяют направление регулировки амплитуды АU(n) и фазы φU(n), соответственно, причем их значение определяется по генерируемому случайному числу, значение U представляет U-ю регулировку и U+1 представляет следующую регулировку.

в которой Р(φi) представляет мощность излучения антенного элемента, когда параметр формирования диаграммы направленности антенного элемента равен W(n), угол направления равен φ, параметр Р(φi) связан с типом антенной решетки, А(φi) представляет уровень излучения в направлении φ при равном расстоянии, и когда ожидаемая точка наблюдения имеет фазу φ для полярных координат, К - количество точек отбора, при использовании приближенного способа и C(i) - весовой коэффициент.

в которой ΔIU(n) и ΔQU(n) представляют длину шага регулировки действительной части IU(n) и мнимой части QU(n), соответственно,  определяют направление регулировки действительной части IU(n) и мнимой части QU(n), соответственно, причем их величины определяются с помощью генерируемого случайного числа; при использовании шагового изменения амплитуды и фазы для полярных координат W(n) новое значение W(n) вычисляют по формуле
определяют направление регулировки действительной части IU(n) и мнимой части QU(n), соответственно, причем их величины определяются с помощью генерируемого случайного числа; при использовании шагового изменения амплитуды и фазы для полярных координат W(n) новое значение W(n) вычисляют по формуле

в которой ΔАU(n) и ΔφU(n) представляют длину шага регулировки амплитуды АU(n) и фазы φU(n), соответственно,  определяют направление регулировки амплитуды АU(n) и фазы φU(n), соответственно, причем их значение определяется по генерируемому случайному числу; значение U представляет U-ю регулировку и U+1 представляет следующую регулировку.
определяют направление регулировки амплитуды АU(n) и фазы φU(n), соответственно, причем их значение определяется по генерируемому случайному числу; значение U представляет U-ю регулировку и U+1 представляет следующую регулировку.

в которой Р(φi) представляет мощность излучения антенного элемента, когда параметр формирования диаграммы направленности антенного элемента равен W(n), угол направления равен φ, параметр P(φi) связан с типом антенной решетки, А(φi) представляет уровень излучения в направлении φ при равном расстоянии, когда ожидаемая точка наблюдения имеет фазу φ для полярных координат, К - количество точек отбора при использовании приближенного способа и C(i) - весовой коэффициент.

в которой ΔIU(n) и ΔQU(n) представляют длину шага регулировки действительной части IU(n) и мнимой части QU(n), соответственно,  определяют направление регулировки действительной части IU(n) и мнимой части QU(n), соответственно, причем их величины определяются с помощью генерируемого случайного числа; при использовании шагового изменения амплитуды и фазы для полярных координат W(n), новое значение W(n) вычисляют по формуле
определяют направление регулировки действительной части IU(n) и мнимой части QU(n), соответственно, причем их величины определяются с помощью генерируемого случайного числа; при использовании шагового изменения амплитуды и фазы для полярных координат W(n), новое значение W(n) вычисляют по формуле

в которой ΔАU(n) и ΔφU(n) представляют длину шага регулировки амплитуды AU(n) и фазы φU(n), соответственно;  определяют направление регулировки амплитуды АU(n) и фазы φU(n), соответственно, причем их значение определяется по генерируемому случайному числу; значение U представляет U-ю регулировку и U+1 представляет следующую регулировку.
определяют направление регулировки амплитуды АU(n) и фазы φU(n), соответственно, причем их значение определяется по генерируемому случайному числу; значение U представляет U-ю регулировку и U+1 представляет следующую регулировку.
| СИЛЬФОННЫЙ КОМПЕНСАТОР ДЛЯ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2005 |
|
RU2293901C1 |
| Электромашинная совмещенная трехфазно-четырехфазная обмотка | 1985 |
|
SU1249651A1 |
| Устройство для измерения скорости ультразвука | 1983 |
|
SU1208504A1 |
| Тренажер операторов | 1985 |
|
SU1249569A1 |
| Поляризованный звонок переменного тока | 1926 |
|
SU26988A1 |
| СПОСОБ КОРРЕКЦИИ АМПЛИТУДНО-ФАЗОВЫХ ХАРАКТЕРИСТИК ПЕРВИЧНЫХ КАНАЛОВ ПЛОСКОЙ ЦИФРОВОЙ АНТЕННОЙ РЕШЕТКИ | 1992 |
|
RU2103768C1 |

