Изобретение относится к радиотехнике и может быть использовано для определения направления прихода радиосигналов.
Известен способ [RU 2739486, C1, G01S 3/10, 24.12.20], основанный на приеме сигнала с помощью ненаправленных антенн, образующих антенную решетку, и измерении разности фаз между сигналами, принятыми в парах антенн, перпендикулярно ориентированных и попарно подключенных к входам двухканальных приемных трактов, выходы которых подключены к фазометрам, при этом измеряют разность фаз между сигналами, принятыми парой диаметрально расположенных антенн в виртуальной круговой эквидистантной решетке, образованной методом перемещения в пространстве по кругу в параллельной земной поверхности плоскости пеленгования беспилотными летательными аппаратами с установленными на них бортовыми ненаправленными антеннами бортовых радиопеленгаторов с двухканальными приемными трактами, соединенными входами каналов с ненаправленной антенной, фазовыми измерителями, блоками приема-передачи пеленгуемых радиосигналов и сигналов управления, бортовыми навигационными системами, устройствами вычисления пеленга и наземным модулем управления и индикации пеленга, причем настройка на частоту бортовых радиопеленгаторов на пеленгуемый источник радиосигнала производится наземным модулем управления и индикации пеленга от поискового командного радиоприемного устройства через блоки приема-передачи пеленгуемых радиосигналов и сигналов управления, при этом пеленгуемым радиосигналом второго из каналов каждого двухканального приемного тракта после прохождения преселектора в двухканальном приемном тракте радиосигнал перенаправляется для модуляции повышенной частоты в блок приема-передачи пеленгуемых радиосигналов и сигналов управления летательного аппарата приема, ретранслируется в блок приема-передачи пеленгуемых радиосигналов и сигналов управления другого летательного аппарата, где демодулируется и подается во второй канал, двухканального приемного тракта вместо перенаправленного радиосигнала для последующей обработки и измерения фазовыми измерителями, с исключением набега фаз из-за ретрансляции радиосигналов между беспилотными летательными аппаратами, определения результатов устройствами вычисления пеленга, при учете данных бортовых навигационных систем на каждом беспилотном летательном аппарате и передачей на наземный модуль управления и индикации для обработки результатов пеленгования, индикаций и регистрации.
Недостатком этого технического решения является относительно узкая область применения, поскольку для его реализации требуется использование беспилотных летательных аппаратов.
Кроме того, известен способ [RU 2625094, C1, G01S 3/890, 11.07.2017], заключающийся в том, что регистрируют время прихода электромагнитного излучения (ЭМИ) на однопозиционный пункт наблюдения с двумя точками регистрации инфразвука, а также время прихода инфразвука на две точки регистрации и определяют для каждой точки регистрации разность времени прихода ЭМИ и инфразвука, причем дополнительно, до прихода инфразвука на две точки регистрации, регистрируют магнитные компоненты сигнала ЭМИ двумя взаимно перпендикулярными в горизонтальной плоскости магнитными антеннами, ориентированными максимумами диаграмм направленности, соответственно, на Север-Юг и Запад-Восток, определяют по соотношению сигналов магнитных антенн азимут, и определяют приближенную дальность до источника сигналов по изменению спектра сигнала ЭМИ в зависимости от пройденного ЭМИ расстояния, для чего определяют суммарный спектр сигналов двух магнитных антенн, верхнюю и нижнюю частоты спектра и амплитуды сигналов на этих частотах, отношение верхней частоты к нижней частоте спектра и отношение амплитуды нижней частоты к амплитуде верхней частоты спектра; по полученным отношениям, нижней частоте спектра, скорости света и азимуту определяют приближенные дальность до источника электромагнитного излучения и его местоположение, по приближенному местоположению для каждой точки регистрации определяют угол прихода сигнала между направлением на источник сигнала и прямой, соединяющей точки регистрации; определяют приближенное расстояние до источника сигнала и по заданной скорости инфразвука определяют ожидаемый интервал времени прихода инфразвука для каждой точки регистрации с учетом погрешности заданной скорости инфразвука и определения приближенной дальности, и прекращают анализ сигналов до наступления ожидаемых интервалов времени прихода инфразвука, а в течение ожидаемых интервалов времени после прихода инфразвука и определения разности времени прихода ЭМИ и инфразвука для каждой точки регистрации, по углам прихода сигналов, известному расстоянию между точками регистрации и разностям времени прихода ЭМИ и инфразвука для каждой точки регистрации уточняют скорость инфразвука во время прохождения сигналов, по разностям времени прихода ЭМИ и инфразвука для каждой точки регистрации и уточненной скорости инфразвука во время прохождения сигналов уточняют значение дальности до источника сигналов, а по азимуту и уточненному значению дальности уточняют местоположение источника сигналов.
Недостатком этого технического решения также является относительно узкая область применения, поскольку оно может быть использовано для инфразвуковых длин волн.
Наиболее близким по технической сущности к предложенному является способ [RU 2379709, C1, G01S 13/95, 20.01.2010], основанный на регистрации сигналов приемными станциями, образующими протяженную решетку, с последующим формированием временных рядов полного электронного содержания и их фильтрацией в диапазоне периодов колебаний, соответствующих отклику ионосферы на воздействие источника ионосферного возмущения, причем используют протяженную приемную решетку и последовательно проверяют гипотезу о значениях направления прихода и скорости распространения плоского фронта ионосферного возмущения путем формирования диаграммы направленности приемной решетки и ее сканирования в заданном секторе обзора пространства «направление прихода - скорость распространения ионосферного возмущения» за счет синтеза выходного сигнала приемной решетки при синфазном суммировании рядов вариаций полного электронного содержания отдельных элементов решетки с временными сдвигами, рассчитанными исходя из проверяемых значений направления прихода и скорости распространения ионосферного возмущения и расстояний, пройденных фронтом ионосферного возмущения между элементами приемной решетки в проверяемом направлении внутри сферического слоя ионосферы Земли, решение о правильности проверяемой гипотезы и обнаружении ионосферного возмущения принимается при превышении суммарным сигналом заданного порогового уровня, соответствующие значения направления прихода и фазовой скорости распространения ионосферного возмущения считаются оценочными значениями.
Недостатком способа является относительно узкая область применения, поскольку способ предназначен, преимущественно, для определения направления прихода ионосферного возмущения. Кроме того, способ обладает относительно низким быстродействием, обусловленным необходимостью сканирования диаграммы направленности приемной решетки в заданном секторе обзора пространства. Все это сужает арсенал технических средств, которые могут быть использованы для определения направления прихода радиосигнала.
Задача, которая решается в изобретении, направлена на создание способа определения направления радиосигнала, обладающего повышенным быстродействием и обеспечивающим равномерную во всем диапазоне пространственных углов точность углометрии, и расширении на этой основе арсенала технических средств, которые могут быть использованы для определения направления прихода радиосигнала.
Требуемый технический результат заключается в повышении быстродействия и обеспечения равномерной во всем диапазоне пространственных углов точности определения направления прихода радиосигнала и расширении арсенала технических средств, которые могут быть использованы для решения такой задачи.
Поставленная задача решается, а требуемый технический результат достигается тем, что в способе, основанном на анализе данных регистрируемых приемной антенной решеткой, с последующим формированием временных рядов полного электронного содержания, согласно изобретению, используют сигналы N=4 ненаправленных или одинаково направленных элементов антенной решетки, фазовые центры которых лежат в вершинах правильного тетраэдра на расстоянии R от центра тетраэдра, где R - радиус описанной сферы, и формируют измеренный вектор полных фаз
на элементах антенной решетки, состоящей из N антенных элементов, трехмерные координаты которых заданы матрицей координат
в системе координат с началом в геометрическом центре антенной решетки
 ,
,
и определяют трехмерный волновой вектор к прихода плоской электромагнитной волны
 ,
,
где λ - длина волны в метрах, λ=300/F, F - частота сигнала в МГц, который связан с углами прихода сигнала пеленгом θ и углом места β выражением
при условии, что ось X системы координат направлена на восток, ось Y - на север, ось Z - вертикально вверх, откуда пеленг θ и угол места β определяют из соотношений выражениями:
θ=arctg(kx/ky), β=arcsin(kz/|k|).
На чертеже представлена схема размещения N=4 ненаправленных или одинаково направленных элементов антенной решетки, фазовые центры которых лежат в вершинах правильного тетраэдра на расстоянии R от центра тетраэдра, где R - радиус описанной сферы.
Способ определения направления прихода радиосигнала реализуется следующим образом.
Предварительно проведем теоретическое обоснование способа.
Математическая постановка задачи оценки направления прихода сигнала сводится к составлению уравнения измерения и его решению относительно искомых углов прихода сигнала, т.е. по измеренному вектору полных фаз ϕ' на элементах антенной решетки (АР), состоящей из N антенных элементов (АЭ), трехмерные координаты которых заданы матрицей координат
в системе координат с началом в геометрическом центре АР
 ,
,
необходимо оценить трехмерный волновой вектор k прихода плоской электромагнитной волны
 ,
,
где λ - длина волны в метрах, λ=300/F, F - частота сигнала в МГц, который связан с углами прихода сигнала пеленгом θ и углом места β выражением

при условии, что ось X системы координат направлена на восток, ось Υ - на север, ось Z - вертикально вверх.
Пеленг θ и угол места связаны с волновым вектором k=(kx,ky,kz) выражениями:

Можно показать, что оптимальной линейной оценкой фазы ϕ0 в точке, совпадающей с началом выбранной системы координат, является фаза, усредненная по элементам АР
 .
.
Тогда для вектора полных фаз относительно фазы сигнала в центре АР
и искомого волнового вектора к плоской электромагнитной волны, падающей на решетку А, уравнение измерения может быть записано в следующем виде

где ε - вектор ошибок измерения фаз, относительно которого полагаем выполненными условия
 ,
,
где Е(⋅) - математическое ожидание; (⋅)T - знак транспонирования; I - единичная матрица размерности N×N;  - среднеквадратическая ошибка фазовых измерений.
- среднеквадратическая ошибка фазовых измерений.
Для решения сформулированной задачи применим метод наименьших квадратов (МНК)

где Ф(k) - функционал квадратичной невязки фазовых измерений
Ф(k)=(Ak-ϕ)T(Ak-ϕ).
В качестве обоснования применения МНК укажем на тот факт, что к выражению (4) сводится получение оценки волнового вектора по принципу максимума правдоподобия при дополнительном предположении о нормальности закона распределения ошибок фазовых измерений.
Для трехмерной АР задача является существенно нелинейной. Путем сведения ее к алгебраическому уравнению с одним неизвестным оценим степень этой нелинейности и предложим способ ее преодоления.
Функционал невязки Ф(k) может быть представлен в следующем виде

где В=АТА - симметричная положительно определенная характеристическая матрица антенной решетки или матрица пространственной ориентации АР,  - линейная МНК оценка волнового вектора по вектору фаз, доставляющая безусловный минимум функционалу невязки Ф(k)
- линейная МНК оценка волнового вектора по вектору фаз, доставляющая безусловный минимум функционалу невязки Ф(k)
 .
.
Действительно, в силу положительной определенности В
 .
.
Приходим к задаче условной оптимизации с нелинейным ограничением:
найти

при условии

Дадим геометрическую интерпретацию задачи (5, 6). В трехмерном пространстве волновых векторов уравнение

для C>0 задает концентрическое семейство подобных эллипсоидов с общим центром в точке  . Условие (6) задает сферу с центром в начале координат. Тогда в геометрической формулировке задача (5, 6) означает следующее: из семейства (7) необходимо выбрать эллипсоид минимального размера, имеющий общую точку со сферой (6), то есть касающийся сферы. Точка касания и будет искомым решением
. Условие (6) задает сферу с центром в начале координат. Тогда в геометрической формулировке задача (5, 6) означает следующее: из семейства (7) необходимо выбрать эллипсоид минимального размера, имеющий общую точку со сферой (6), то есть касающийся сферы. Точка касания и будет искомым решением  .
.
Очевидно, что если случайный вектор  попадает на сферу (6), то он и будет решением задачи,
попадает на сферу (6), то он и будет решением задачи,  . В дальнейшем рассмотрении этот тривиальный случай исключаем и считаем, что
. В дальнейшем рассмотрении этот тривиальный случай исключаем и считаем, что  .
.
Вводя множитель Лагранжа L, сводим задачу к безусловной оптимизации поиска минимума функционала  Дифференцируя по k и приравнивая производную к 0, получим:
Дифференцируя по k и приравнивая производную к 0, получим:

или 
Расписывая покоординатно это равенство в системе координат, оси которой - собственные вектора матрицы В, получим систему уравнений для координат вектора k=(k1,k2,k3)T и параметра L:
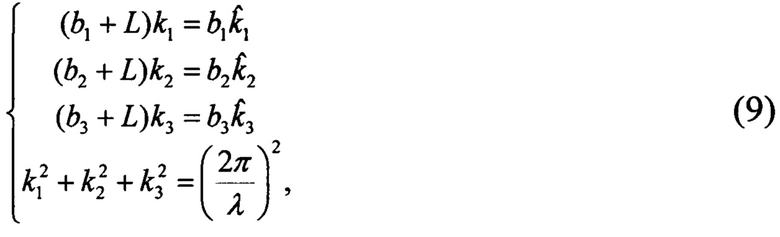
где b1, b2, b3 - неотрицательные собственные значения матрицы В.
Подставляя выражения для kl, k2, k3 из первых трех уравнений в четвертое, получаем
 ,
,
или в виде алгебраического полинома относительно L

уравнение 6-й степени с одним неизвестным L.
Исходя из приведенной выше геометрической интерпретации задачи, уравнение (10) имеет либо 2, либо 4 вещественных корня, и решением задачи оптимизации (5, 6) является корень, ближайший к 0.
Можно показать, что в случае осевой симметрии антенной решетки два из трех собственных значений матрицы В равны (b2=b3), две из трех осей эллипсоида тоже равны и он становится эллипсоидом вращения, и задача сводится к уравнению 4-й степени, а в случае полной симметрии АР (b1=b2=b3) - к тривиальной задаче касания сфер, т.е. к линейному уравнению относительно L и к линейной оценке

К линейной оценке (11) приходим и в случае, когда вектор  совпадает с одним из собственных векторов матрицы В.
совпадает с одним из собственных векторов матрицы В.
В общем случае для решения уравнения (10) можно применить быстро сходящийся итерационный метод Ньютона:

где ƒ'(L) - производная функции ƒ(L):

После нахождения ближайшего к 0 корня уравнения (10), подставляя его в систему (9), находим координаты волнового вектора в системе координат, оси которой совпадают по направлению с собственными векторами матрицы В. Переходя в исходную систему координат, из (1) получаем оценки углов прихода сигнала - пеленга и угла места.
В предложенном устройстве используется практический случай применения координат четырех (N=4) элементов АР. Фазовые центры элементов находятся в вершинах правильного тетраэдра на расстоянии R от центра тетраэдра, где R - радиус описанной сферы. Пусть для определенности в системе координат с началом в центре тетраэдра три вершины находятся в горизонтальной плоскости, первая - на оси Y (в направлении на север), две других - по часовой стрелке, если смотреть сверху, четвертая - на вертикальной оси Z в положительном (вверх) направлении (см. фиг.).
Тогда матрица координат АР имеет вид
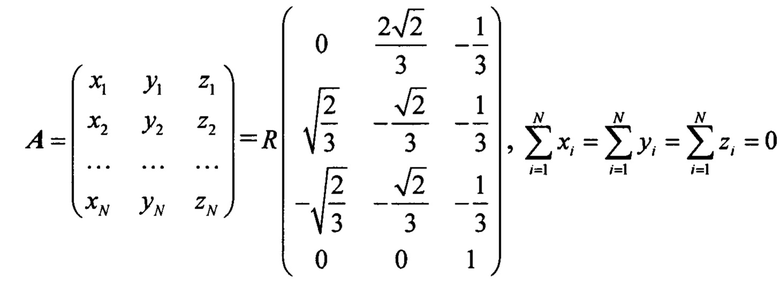 .
.
Матрица вторых моментов координат имеет вид
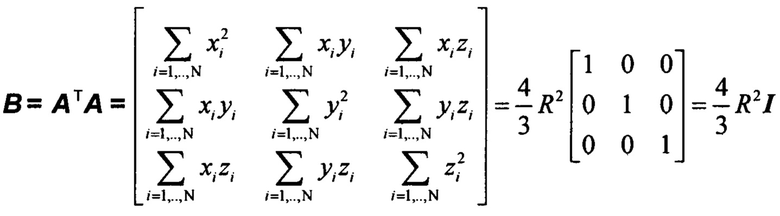 ,
,
где I- единичная матрица размерности 3×3.
МНК-оценка волнового вектора по измеренному на элементах АР вектору фаз имеет вид
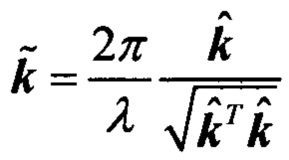 ,
,
где:  ; λ - длина волны.
; λ - длина волны.
Пеленг и угол места связаны с волновым вектором k=(kx,ky,kz) и вычисляются на основе выражений (2). Из этих соотношений видно, что пространственные углы прихода волны не зависят от модуля волнового вектора, и так как  и
и  отличаются лишь скалярным множителем и оба коллинеарны вектору q=ATφ, то для исключения избыточных действий при оценке углов прихода в качестве вектора к в выражениях (2) достаточно взять k=q.
отличаются лишь скалярным множителем и оба коллинеарны вектору q=ATφ, то для исключения избыточных действий при оценке углов прихода в качестве вектора к в выражениях (2) достаточно взять k=q.
Ковариационная матрица погрешностей - отклонений вектора  от истинного k определяется выражением
от истинного k определяется выражением
 ,
,
где σо - среднеквадратическая ошибка фазовых измерений.
Откуда относительная ошибка оценки волнового вектора, она же угловая ошибка оценки направления прихода в радианах
 .
.
При этом ошибка одинакова и не зависит от направления прихода радиосигнала, что является замечательным свойством симметрии АР.
Таким образом, предложенный способ оценки направления прихода сигнала по измеренному распределению фаз на элементах трехмерной АР не требует процедур сканирования и двумерных итераций, что упрощает способ и исключает возникновением погрешностей этими процедурами. Определение направления прихода ЭМ волны производится по четырехканальным фазовым измерениям, что упрощает реализацию соответствующих устройств и повышает их быстродействие. По предварительным оценкам, основанным на подсчете количества выполняемых операций, эффект от использования предложенного способа позволяет повысить оперативность определения направления прихода в 5-7 раз. Исследования показали, что при среднеквадратической ошибке (СКО) фазовых измерений σо=5°, СКО определения направления прихода излучения σ<2° при удалении фазовых центров элементов антенной решетки от ее центра на расстояние R=01λmax и σ≤1° при R=0,3λmax, где λmax - длина волны радиосигнала, соответствующая нижней границе диапазона рабочих частот.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОСИГНАЛОВ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ В КОРОТКОВОЛНОВОМ ДИАПАЗОНЕ | 2010 |
|
RU2461015C2 |
| СПОСОБ МНОГОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285935C2 |
| Способ повышения точности пеленгования источников радиоизлучения обнаружителем-пеленгатором с многошкальной антенной системой | 2019 |
|
RU2713235C1 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285934C2 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И МНОГОКАНАЛЬНЫЙ ПЕЛЕНГАТОР | 1999 |
|
RU2144200C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ (ВАРИАНТЫ) | 2008 |
|
RU2393498C2 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА | 2020 |
|
RU2739486C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ПРИ МНОГОКАНАЛЬНОЙ ФАЗОВОЙ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ КОРОТКОВОЛНОВОГО ДИАПАЗОНА | 2012 |
|
RU2527943C1 |
| Способ пеленгации источников излучения, основанный на анализе корреляционной матрицы сигналов, в радиолокационных станциях с фазированной антенной решеткой с пространственным возбуждением и системой облучателей с цифровым выходом | 2022 |
|
RU2791285C1 |
| Способ однопозиционного определения координат источников радиоизлучений коротковолнового диапазона радиоволн при ионосферном распространении | 2019 |
|
RU2713188C1 |

Изобретение относится к радиотехнике и может быть использовано для определения направления прихода радиосигналов. Требуемый технический результат, заключающийся в повышении быстродействия и обеспечении равномерной во всем диапазоне пространственных углов точности определения направления прихода радиосигнала, а также в расширении арсенала технических средств, достигается в способе, основанном на регистрации сигналов элементами приемной антенной решетки, отличающийся тем, что используют сигналы N=4 ненаправленных или одинаково направленных элементов антенной решетки, фазовые центры которых лежат в вершинах правильного тетраэдра на расстоянии R от центра тетраэдра, где R - радиус описанной сферы, и формируют измеренный вектор полных фаз  на N антенных элементах, трехмерные координаты которых заданы матрицей координат, определяют трехмерный волновой вектор k прихода плоской электромагнитной волны
на N антенных элементах, трехмерные координаты которых заданы матрицей координат, определяют трехмерный волновой вектор k прихода плоской электромагнитной волны  , откуда пеленг θ и угол места β определяют из соотношений: θ=arctg(kx/ky), β=arcsin(kz/|k|). 1 ил.
, откуда пеленг θ и угол места β определяют из соотношений: θ=arctg(kx/ky), β=arcsin(kz/|k|). 1 ил.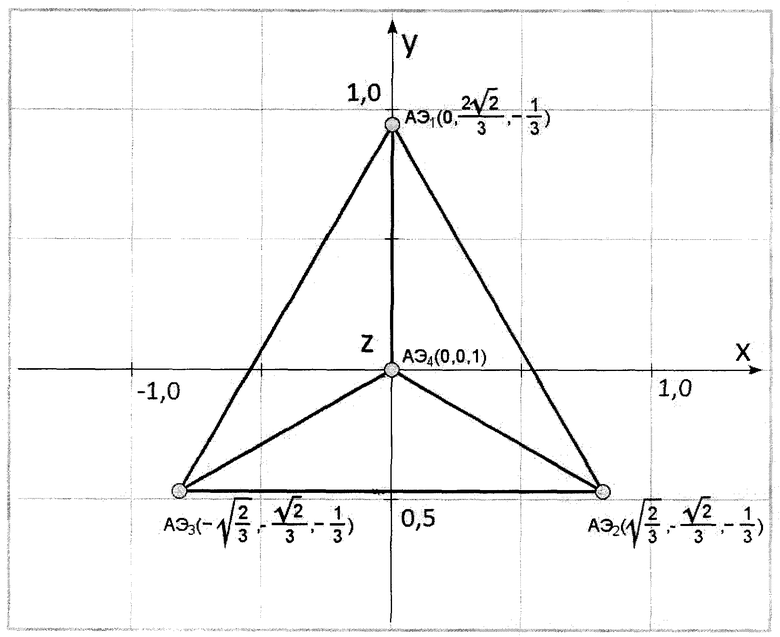
Способ определения направления прихода радиосигнала, основанный на регистрации сигналов элементами приемной антенной решетки, отличающийся тем, что используют сигналы N=4 ненаправленных или одинаково направленных элементов антенной решетки, фазовые центры которых лежат в вершинах правильного тетраэдра на расстоянии R от центра тетраэдра, где R - радиус описанной сферы, и формируют измеренный вектор полных фаз
на N антенных элементах, трехмерные координаты которых заданы матрицей координат
в системе координат с началом в геометрическом центре антенной решетки
и определяют трехмерный волновой вектор k прихода плоской электромагнитной волны
где λ - длина волны в метрах, λ=300/F, F - частота сигнала в МГц,
который связан с углами прихода сигнала пеленгом θ и углом места β выражением
при условии, что ось X системы координат направлена на восток, ось Y - на север, ось Z - вертикально вверх, откуда пеленг θ и угол места β определяют из соотношений:
θ=arctg(kx/ky), β=arcsin(kz/|k|).
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2008 |
|
RU2379709C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА | 2020 |
|
RU2739486C1 |
| US 5030959 A1, 09.07.1991 | |||
| Ю.Б | |||
| Нечаев и др., Алгоритмы диаграммообразования адаптивных антенных решеток в условиях многолучевого распространения радиоволн, Научные ведомости, выпуск 21/1, 2012, номер 1 (120), СТР | |||
| Приспособление для градации давления в воздухопроводе воздушных тормозов | 1921 |
|
SU193A1 |
| Гайдученко А.Б., АЛГОРИТМ ОПРЕДЕЛЕНИЯ УГЛА ПРИХОДА СИГНАЛА С ПОМОЩЬЮ | |||

