Область техники
Настоящее изобретение в целом относится к устройству и способу приема данных в системе мобильной связи, использующей схему адаптивной антенной решетки (ААА), и, в частности, к устройству и способу приема данных с использованием двухэтапного формирования весов.
Описание предшествующего уровня техники
Следующее поколение системы мобильной связи эволюционировало в систему связи с пакетными услугами, которая передает пакетные данные в пачке импульсов множеству мобильных станций (MC). Система связи с пакетными услугами была спроектирована для обеспечения передачи данных большого объема. Такая система связи с пакетными услугами была разработана для обеспечения высокоскоростной пакетной услуги. В этом отношении Проект партнерства третьего поколения (3GPP), организация по стандартизации схемы асинхронной связи, предлагает высокоскоростной пакетный доступ по нисходящей линии связи (HSDPA), чтобы обеспечивать высокоскоростную пакетную услугу, в то время как Проект 2 партнерства третьего поколения (3GPP2), организация по стандартизации схемы синхронной связи, предлагает «lx эволюцию «только данные/голос» (lx EV-DO/V) для обеспечения высокоскоростной пакетной услуги. И HSDPA и lx EV-DO/V предполагают предоставлять высокоскоростную пакетную услугу для равномерной передачи Web/Интернет-услуг, а для того чтобы предоставлять высокоскоростную пакетную услугу пиковая пропускная способность также и средняя пропускная способность должны быть оптимизированы для равномерной передачи пакетных данных и канальных данных, таких как данные голосовой услуги.
Для того чтобы поддерживать высокоскоростную передачу пакетных данных система связи, применяющая HSDPA (в дальнейшем упоминаемая как «система связи HSDPA»), недавно ввела 3 вида методов передачи данных: метод адаптивной модуляции и кодирования (AMC), метод гибридного автоматического запроса на повторную передачу (HARQ) и метод быстрого выбора сотовой ячейки (FCS). Система связи HSDPA повышает скорость передачи данных, используя методы AMC, HARQ и FCS. В качестве другой системы связи для повышения скорости передачи данных существует система связи, использующая lx EV-DO/V (в дальнейшем упоминаемая как «система связи lx EV-DO/V»). Система связи lx EV-DO/V также повышает скорость передачи данных, чтобы обеспечить производительность системы. Помимо новых методов, таких как AMC, HARQ и FCS, существует метод многоэлементной антенны в качестве еще одного метода ради преодоления ограничения в заданной полосе пропускания, то есть повышения скорости передачи данных. Метод многоэлементной антенны может преодолевать ограничение ресурса полосы пропускания в частотной области, поскольку она использует пространственную область.
Метод многоэлементной антенны описан ниже. Система связи построена так, что множество MC поддерживают связь друг с другом через одну базовую станцию (БС). Когда БС выполняет высокоскоростную передачу данных на МС, возникает явление замирания, обусловленное характеристикой радиоканалов. Для того чтобы преодолеть явление замирания, был предложен метод разнесения передающих антенн, который является разновидностью метода многоэлементной антенны. При разнесении передающих антенн сигналы передаются с использованием, по меньшей мере, двух передающих антенн, т.е. множества антенн, чтобы минимизировать потери передаваемых данных, обусловленные явлением замирания, тем самым повышая скорость передачи данных. Метод разнесения передающих антенн описан ниже.
Обычно, в среде радиоканала в системе мобильной связи, в отличие от среды проводного канала, передаваемый сигнал в действительности искажается вследствие нескольких факторов, таких как многолучевая интерференция, затенение, волновое затухание, изменяющиеся во времени шумы, взаимные помехи и т.д. Затухание, вызываемое многолучевой интерференцией, непосредственно связано с подвижностью отражателя или пользователя (или МС), и фактически принимается смесь передаваемого сигнала и сигнала взаимной помехи. Поэтому принятый сигнал испытывает сильное искажение во время его реальной передачи, снижая производительность всей системы мобильной связи. Замирание может иметь результатом искажение по амплитуде и фазе принятого сигнала, препятствуя высокоскоростной передаче данных в среде радиоканала. Множество исследований проводится для решения проблемы замирания. Таким образом, чтобы передавать данные на высокой скорости, система мобильной связи должна свести к минимуму потери, обусловленные характеристикой канала мобильной связи, такой как замирание и взаимные помехи отдельного пользователя. В качестве метода, предотвращающего нестабильную связь вследствие замирания, используется метод разнесения, и множество антенн используется для реализации метода пространственного разнесения, одного из методов разнесения.
Разнесение передающих антенн используется повсеместно в качестве метода эффективного разрешения проблемы замирания. При разнесении передающих антенн принимается множество передаваемых сигналов, которые испытали независимые явления замирания в среде радиоканала, тем самым противодействуя искажениям, вызванным замиранием. Разнесение передающих антенн подразделяется на временное разнесение, частотное разнесение, многолучевое разнесение и пространственное разнесение. Другими словами, система мобильной связи должна удовлетворительно противодействовать явлению замирания, которое сильно влияет на эффективность связи, для того чтобы выполнять высокоскоростную передачу данных. Явление замирания должно быть преодолено, поскольку оно уменьшает амплитуду принятого сигнала вплоть до нескольких дБ по отношению к десяткам дБ. Для того чтобы преодолеть явление замирания, применяются вышеупомянутые методы разнесения. Например, метод множественного доступа с кодовым разделением каналов (CDMA) использует многоотводный приемник, который может успешно реализовать разнесение, используя разброс задержек канала. Многоотводный приемник является разновидностью схемы разнесения для приема сигналов многолучевого распространения. Однако разнесение при приеме, используемое в многоотводном приемнике, является невыгодным, потому что оно не может достичь желаемого выигрыша от разнесения, когда разброс задержек канала относительно мал.
Метод временного разнесения эффективно противодействует ошибкам пакетного сигнала, возникающим в среде радиоканала, используя перемежение и кодирование, и обычно используется в канале с разбросом по доплеровской частоте. Однако невыгодно, что временное разнесение почти не может добиться эффектов разнесения в низкоскоростном канале с разбросом по доплеровской частоте. Метод пространственного разнесения обычно используется в канале с малым разбросом задержек, таком как канал в помещении или канале, ориентированном на скорости пешеходов, которые являются низкоскоростным каналом с разбросом по доплеровской частоте. Пространственное разнесение является методом для достижения выигрыша от разнесения с использованием, по меньшей мере, двух антенн. В этом методе, когда сигнал, переданный через одну антенну, ослабляется вследствие замирания, сигнал, переданный через другую антенну, принимается, тем самым достигая выигрыша от разнесения. Пространственное разнесение подразделяется на разнесение приемных антенн с использованием множества приемных антенн и разнесение передающих антенн с использованием множества передающих антенн.
Метод приемной адаптивной антенной решетки (Rx-AAA), являющийся разновидностью метода разнесения принимающих антенн, описан ниже.
В методе Rx-AAA посредством вычисления скалярного произведения соответствующих весового вектора и сигнального вектора принятого сигнала, принимаемого посредством антенной решетки, состоящей из множества приемных антенн, сигнал, принятый в направлении полезном для приемника, максимизируется по его уровню, а сигнал, принятый в направлении, не являющемся полезным для приемника, минимизируется по его уровню. Как результат, метод Rx-AAA позволяет усилить только желательный принятый сигнал до максимального уровня, тем самым поддерживая высококачественный вызов и вызывая повышение полной пропускной способности системы и зоны действия обслуживания.
Хотя метод Rx-AAA может быть применен как в системе мобильной связи множественного доступа с частотным разделением каналов (FDMA), так и в системе мобильной связи множественного доступа с временным разделением каналов (TDMA), в материалах настоящей заявки будет предполагаться, что метод Rx-AAA применяется в системе связи, использующей метод CDMA (упоминаемая как «система связи CDMA»).
Фиг.1 - структурная схема, иллюстрирующая структуру приемника БС в традиционной системе мобильной связи CDMA. Согласно фиг.1, приемник БС состоит из N приемных антенн (Rx_ANT) - первой приемной антенны 111, второй приемной антенны 121,..., и N-ой приемной антенны 131, N радиочастотных (РЧ, RF) процессоров - первого РЧ-процессора 112, второго РЧ-процессора 122,..., и N-ого РЧ-процессора 132, приведенных в соответствие соответствующим приемным антеннам, N блоков поиска многолучевых сигналов - первого блока 113 поиска многолучевых сигналов, второго блока 123 поиска многолучевых сигналов,..., и N-ого блока 133 поиска многолучевых сигналов, приведенных в соответствие соответствующим РЧ-процессорам, L каналов разнесенного приема (отводов) - первого отвода 140-1, второго отвода 140-2,..., и L-того отвода 140-L для обработки L сигналов многолучевого распространения, поиск которых осуществляется блоками поиска многолучевых сигналов, многолучевого сумматора 150 для суммирования сигналов многолучевого распространения с выходов L отводов, обращенного перемежителя 160 и декодера 170.
Сигналы, переданные передатчиками в множестве МС, принимаются N приемными антеннами по радиоканалам с многолучевым замиранием. Первая приемная антенна 111 выводит принятый сигнал в первый РЧ-процессор 112. Каждый из РЧ-процессоров состоит из усилителя, преобразователя частоты, фильтра и аналого-цифрового (A/Ц) преобразователя и обрабатывает РЧ-сигнал. Первый РЧ-процессор 112 осуществляет РЧ-обработку сигнала, выведенного с первой приемной антенны 111, чтобы преобразовать сигнал в цифровой сигнал базовой полосы, и выводит цифровой сигнал базовой полосы в первый блок 113 поиска многолучевых сигналов. Первый блок 113 поиска многолучевых сигналов выделяет L компонент многолучевого распространения из сигнала, выведенного из первого РЧ-процессора 112, и L выделенных многолучевых компонент многолучевого распространения выводятся, соответственно, на отводы с первого отвода 140-1 по L-ый отвод 140-L.
Отводы с первого отвода 140-1 до L-ый отвод 140-L, поставленные в соответствие L путям распространения на взаимно-однозначной основе, обрабатывают L компонент многолучевого распространения. Поскольку L компонент многолучевого распространения учитываются для каждого из сигналов, принятых через N приемных антенн, сигнальная обработка должна быть выполнена над NxL сигналами, и из NxL сигналов сигналы одного и того же пути выдаются в один и тот же отвод.
Подобным образом, вторая приемная антенна 121 выводит принятый сигнал во второй РЧ-процессор 122. Второй РЧ-процессор 122 осуществляет РЧ-обработку сигнала, выведенного со второй приемной антенны 121, для преобразования сигнала в цифровой сигнал базовой полосы и выдает цифровой сигнал базовой полосы на второй блок 123 поиска многолучевых сигналов. Второй блок 123 поиска многолучевых сигналов выделяет L компонент многолучевого распространения из сигнала, выведенного из второго РЧ-процессора 122, и L выделенных компонент многолучевого распространения выдаются, соответственно, на отводы с первого отвода 140-1 по L-ый отвод 140-L.
Аналогично, N-ая приемная антенна 131 выводит принятый сигнал в N-ый РЧ-процессор 132. N-ый РЧ-процессор 132 осуществляет РЧ-обработку сигнала, выведенного с N-ной приемной антенны 131, для преобразования сигнала в цифровой сигнал базовой полосы и выводит цифровой сигнал базовой полосы на N-ый блок 133 поиска многолучевых сигналов. N-ый блок 133 поиска многолучевых сигналов выделяет L компонент многолучевого распространения из сигнала, выведенного из N-ного РЧ-процессора 132, и L выделенных компонент многолучевого распространения выдаются, соответственно, на отводы первого отвода 140-1 по L-ый отвод 140-L.
Таким образом, среди L сигналов многолучевого распространения для сигналов, принятых через N приемных антенн, одинаковые сигналы многолучевого распространения вводятся в одни и те же отводы. Например, первые сигналы многолучевого распространения с первой приемной антенны 111 по N-ую приемную антенну 131 выдаются на первый отвод 140-1. Таким же образом, L-тые сигналы многолучевого распространения с первой приемной антенны 111 по N-ую приемную антенну 131 выдаются на L-тый отвод 140-L. Отводы с первого отвода 140-1 по L-тый отвод 140-L отличаются только сигналами, введенными в них и выведенных из них, и являются идентичными по структуре и функционированию. Поэтому для простоты ниже описан только первый отвод 140-1.
Первый отвод 140-1 содержит N устройство сжатия - первого устройства 141 сжатия, второго устройства 142 сжатия,..., и N-ого устройства 143 сжатия, соответствующих N блокам поиска многолучевых сигналов, сигнальный процессор 144 для вычисления весового вектора для формирования приемного луча с использованием сигналов, принятых от N устройств сжатия, и формирователь 145 приемного луча для формирования приемного луча с использованием весового вектора, вычисленного сигнальным процессором 14.
Первый сигнал многолучевого распространения, выведенный из первого блока 113 поиска многолучевых сигналов, вводится в первое устройство 141 сжатия. Первое устройство 141 сжатия сжимает первый сигнал многолучевого распространения, выведенный из первого блока 113 поиска многолучевых сигналов, с использованием заранее установленного кода расширения и выводит сжатый многолучевой сигнал в сигнальный процессор 144 и формирователь 145 приемного луча. При этом процесс сжатия определен как «временная обработка». Подобным образом первый сигнал многолучевого распространения, выведенный из второго блока 123 поиска многолучевых сигналов, вводится во второе устройство 142 сжатия. Второе устройство 142 сжатия сжимает первый сигнал многолучевого распространения, выведенный из второго блока 123 поиска многолучевых сигналов, с использованием заранее установленного кода расширения и выводит сжатый многолучевой сигнал в сигнальный процессор 144 и формирователь 145 приемного луча. Аналогично первый сигнал многолучевого распространения, выведенный из N-ого блока 133 поиска многолучевых сигналов, вводится в N-ое устройство 143 сжатия. N-ое устройство 143 сжатия сжимает первый сигнал многолучевого распространения, выведенный из N-ого блока 133 поиска многолучевых сигналов, с использованием заранее установленного кода расширения и выводит сжатый многолучевой сигнал в сигнальный процессор 144 и формирователь 145 приемного луча.
Сигнальный процессор 144 принимает сигналы, выведенные с первого устройства 141 сжатия по N-ое устройство 143 сжатия, и вычисляет набор Wk весов для формирования приемного луча. Здесь набор первых сигналов многолучевого распространения, выведенных из блоков поиска многолучевых сигналов с первого блока 113 по N-ый блок 133, определен как «Xk». Первый набор Xkсигналов многолучевого распространения представляет набор первых сигналов многолучевого распространения, принятых приемными антеннами с первой приемной антенны 111 по N-ую приемную антенну 131 в k-ой точке, и первые сигналы многолучевого распространения, составляющие первый набор Xkсигналов многолучевого распространения, все являются векторными сигналами. Набор Wk весов представляет набор весов, которые должны быть применены к первым сигналам многолучевого распространения, принятым приемными антеннами с первой приемной антенны 111 по N-ую приемную антенну 131 в k-ой точке, и веса, составляющие набор Wk весов, все являются векторными сигналами.
Набор сигналов, определенных посредством сжатия всех первых сигналов многолучевого распространения в первом наборе Xkсигналов многолучевого распространения, определен как yk. Набор yk сжатых сигналов из первых сигналов многолучевого распространения представляет набор сигналов, определенных посредством сжатия первых сигналов многолучевого распространения, принятых приемными антеннами с первой приемной антенны 111 по N-ую приемную антенну 131 в k-ой точке, и сжатые сигналы, составляющие набор yk сжатых сигналов, все являются векторными сигналами. Здесь для удобства объяснения термин «набор» будет опущен, а подчеркнутые параметры представляют наборы соответствующих элементов.
Каждое из устройств сжатия с первого 141 по N-ое устройство 143 сжатия сжимает первый сигнал Xkмноголучевого распространения с использованием заранее установленного кода сжатия, так что мощность приема полезного принятого сигнала больше, чем мощность приема сигнала взаимной помехи на выигрыш от обработки сигналов. При этом код сжатия является идентичным коду расширения, используемому в передатчиках мобильных станций.
Как описано выше, сжатый сигнал yk первого сигнала Xkмноголучевого распространения вводится в сигнальный процессор 144. Сигнальный процессор 144 вычисляет вес Wk на основе сжатого сигнала ykдляпервого сигнала многолучевого распространения Xk и выводит вес Wk в формирователь 145 приемного луча. Как результат сигнальный процессор 144 вычисляет вес Wk, включающий в себя сумму N весовых векторов, примененных к первому сигналу Xk многолучевого распространения, выведенному с приемных антенн с первой 111 по N-ную приемную антенну 131, на основе сжатых сигналов ykсуммы N первых многолучевых сигналов, выведенных с приемных антенн с первой 111 по N-ую приемную антенну 131. Формирователь 145 приемного луча принимает сжатые сигналы ykдля суммы N первых сигналов Xk многолучевого распространения и суммы N весовых векторов Wk. Формирователь 145 приемного луча формирует приемный луч с суммой N весовых векторов Wk, вычисляет скалярное произведение сжатого сигнала ykдляпервого сигнала Xkмноголучевого распространения и веса Wk, соответствующих приемному лучу, и выводит результат в качестве выходного сигнала zk первого отвода 140-1. Выходной сигнал zk первого отвода 140-1 может быть выражен как

В уравнении (1) H обозначает эрмитов оператор, то есть сопряжение-транспонирование. Набор zk выходных сигналов zk L отводов в приемнике БС затем подается на многолучевой сумматор 150.
Хотя описан только первый отвод 140-1, другие отводы функционируют эквивалентно первому отводу 140-1. Поэтому многолучевой сумматор 150 суммирует сигналы отводов с первого 140-1 по L-тый отвод 140-L и выводит суммированный сигнал в обращенный перемежитель 160. Обращенный перемежитель 160 осуществляет обращенное перемежение сигнала, выведенного из многолучевого сумматора 150 способом обращенного перемежения, соответствующего способу перемежения, используемому в передатчике, и выводит сигнал обращенного перемежения в декодер 170. Декодер 170 декодирует сигнал обращенного перемежителя 160 способом декодирования, соответствующим способу кодирования, применяемому в передатчике, и выводит декодированный сигнал как окончательные принятые данные.
Сигнальный процессор 144 вычисляет вес Wkтак, чтобы минимизировать среднеквадратическую ошибку (MSE) сигнала, принятого от передатчика МС, желательного для приема, посредством заранее заданного алгоритма. Формирователь 145 приемного луча формирует приемный луч с использованием веса Wk, сформированного сигнальным процессором 144. Процесс формирования приемного луча, минимизирующий MSE, назван «пространственной обработкой». Следовательно, когда используется в системе мобильной связи CDMA, метод Rx-AAA, временная обработка и пространственная обработка выполняются вместе. Операция совместного выполнения временной обработки и пространственной обработки названа «пространственно-временной обработкой».
Сигнальный процессор 144 принимает сигналы многолучевого распространения, сжатые для каждого отвода, как описано выше, и вычисляет вес, обеспечивающий максимизацию выигрыша от использования метода Rx-AAA, согласно заранее заданному алгоритму. Сигнальный процессор 144 минимизирует MSE. Поэтому в последнее время активно проводятся исследования алгоритма вычисления весов для адаптивной минимизации MSE. Однако алгоритм вычисления весов для адаптивной минимизации MSE является алгоритмом для уменьшения ошибок на основе опорного сигнала, и этот алгоритм поддерживает метод постоянного модуля (CM) и метод с управлением по решению (DD) в качестве «слепого» (без подтверждения приема) метода, когда опорного сигнала нет.
Однако алгоритм уменьшения ошибок на основе опорного сигнала имеет трудности в сходимости к минимальному значению MSE, требуемому системой в среде, где канал, такой как канал с быстрым замиранием, претерпевает быстрое изменение, или в среде, где применяется схема модуляции высокого порядка, например 16-позиционная квадратурная амплитудная модуляция (16QAM). Даже если он сходится к конкретному значению MSE, минимальное значение MSE устанавливается в относительно большое значение. Когда минимальное значение MSE устанавливается в относительно большое значение, уменьшается выигрыш, имеющий место при использовании метода Rx-AAA. Следовательно, этот алгоритм не подходит для системы высокоскоростной передачи данных.
Сущность изобретения
Следовательно, целью настоящего изобретения является создание устройства и способа приема данных с использованием схемы адаптивной антенной решетки в системе мобильной связи.
Другой целью настоящего изобретения является создание устройства и способа приема данных с использованием метода 2-этапного формирования весов в системе мобильной связи, использующей схему адаптивной антенной решетки.
Дополнительной целью настоящего изобретения является создание устройства и способа формирования приемного луча, обладающего минимальным значением ошибки в системе мобильной связи, использующей схему адаптивной антенной решетки.
В соответствии с первым аспектом настоящего изобретения предложено устройство формирования веса для формирования приемного луча из принятого сигнала, принимаемого множеством приемных антенн с использованием решетки приемных антенн. Устройство содержит устройство сжатия для формирования сжатого сигнала посредством сжатия принятого сигнала; сигнальный процессор для приема сжатого сигнала, выходного сигнала, сформированного посредством применения приемного луча к сжатому сигналу, и веса, вычисляющий вес с использованием первого метода, если разность между значением ошибки в текущее время и значением ошибки в предыдущее время является большей, чем абсолютное значение первого порогового значения, либо значение ошибки в текущее время является большим или равным второму пороговому значению, и вычисляющий вес с использованием второго метода, если разность между значением ошибки в текущее время и значением ошибки в предыдущее время является меньшей или равной абсолютному значению первого порогового значения, а значение ошибки в текущее время является меньшим, чем второе пороговое значение.
В соответствии со вторым аспектом настоящего изобретения предложено устройство формирования веса для формирования приемного луча из принятого сигнала, принимаемого множеством приемных антенн с использованием решетки приемных антенн. Устройство содержит устройство сжатия для формирования сжатого сигнала посредством сжатия принятого сигнала; вычислитель весов для приема сжатого сигнала и вычисления веса с использованием одного из первого метода и второго метода при заранее заданном управлении; определитель сходимости, обеспечивающий возможность вычислителю весов использовать первый метод, если разность между значением ошибки в текущее время и значением ошибки в предыдущее время является большей, чем абсолютное значение первого порогового значения, либо значение ошибки в настоящее время является большим или равным второму пороговому значению, и обеспечивающий возможность вычислителю весов использовать второй метод, если разность между значением ошибки в текущее время и значением ошибки в предыдущее время является меньшей или равной абсолютному значению первого порогового значения, а значение ошибки в текущее время является меньшим, чем второе пороговое значение; и формирователь приемного луча для приема сжатого сигнала, формирования приемного луча с использованием вычисленного веса и формирования выходного сигнала посредством применения сформированного приемного луча к спектрально сжатому сигналу.
В соответствии с третьим аспектом настоящего изобретения предложено устройство формирования веса для формирования приемного луча из принятого сигнала, принимаемого множеством приемных антенн с использованием решетки приемных антенн. Устройство содержит устройство сжатия для формирования сжатого сигнала посредством сжатия принятого сигнала; вычислитель корреляционной матрицы приема для вычисления корреляционных матриц приема с использованием опорного принятого сигнала и сжатого сигнала; вычислитель весов для приема сжатого сигнала и вычисления веса с использованием одного из первого метода и второго метода при заранее заданном управлении; определитель сходимости для обеспечения возможности вычислителю весов использовать первый метод, если разность между значением ошибки в текущее время, представляющая разность между выходным сигналом, сформированным посредством применения приемного луча к сжатому сигналу, и полезным принятым сигналом, и значением ошибки в предыдущее время является большей, чем абсолютное значение первого порогового значения, либо значение ошибки в текущее время является большим или равным второму пороговому значению, и обеспечения возможности вычислителю весов использовать второй метод, если разность между значением ошибки в текущее время и значением ошибки в предыдущее время является меньшей или равной абсолютному значению первого порогового значения, а значение ошибки в текущее время является меньшим, чем второе пороговое значение; и формирователь приемного луча для приема сжатого сигнала, формирования приемного луча с использованием вычисленного веса и формирования выходного сигнала посредством применения сформированного приемного луча к сжатому сигналу.
В соответствии с четвертым аспектом настоящего изобретения предложено устройство для формирования сигнала приемного луча из принятого сигнала, принимаемого множеством приемных антенн с использованием решетки приемных антенн. Устройство содержит устройство сжатия для формирования сжатого сигнала посредством сжатия принятого сигнала; формирователь приемного луча для формирования сигнала приемного луча посредством приема сжатого сигнала и весового сигнала; и сигнальный процессор для формирования сигнала приемного луча с использованием первого метода, если разность между значением ошибки текущего весового сигнала, сформированного соответственно сжатому сигналу, соответствующему количеству итераций в текущее время, и значением ошибки предыдущего весового сигнала, сформированного соответственно сжатому сигналу, соответствующему количеству итераций в предыдущее время, является большей, чем абсолютное значение первого порогового значения, или если значение ошибки текущего весового сигнала является большим или равным второму пороговому значению, и формирования сигнала приемного луча с использованием второго метода, если разность между значением ошибки текущего весового сигнала и значением ошибки предыдущего весового сигнала является меньшей или равной абсолютному значению первого порогового значения, а значение ошибки текущего весового сигнала является меньшим, чем второе пороговое значение.
В соответствии с пятым аспектом настоящего изобретения предложен способ формирования веса для формирования приемного луча из принятого сигнала, принимаемого множеством приемных антенн с использованием решетки приемных антенн. Способ содержит этапы формирования сжатого сигнала посредством сжатия принятого сигнала; вычисления веса для формирования приемного луча на основе сжатого сигнала, выходного сигнала, сформированного посредством применения приемного луча к сжатому сигналу, и веса с использованием заранее заданного метода; выполнения операции управления из условия, что вес вычисляется с использованием первого метода, если разность между значением ошибки в текущее время и значением ошибки в предыдущее время является большей, чем абсолютное значение первого порогового значения, либо значение ошибки в текущее время является большим либо равным второму пороговому значению; и выполнения операции управления из условия, что вес вычисляется с использованием второго метода, если разность между значением ошибки в текущее время и значением ошибки в предыдущее время является меньшей либо равной абсолютному значению первого порогового значения, а значение ошибки в текущее время является меньшим, чем второе пороговое значение.
В соответствии с шестым аспектом настоящего изобретения предложен способ формирования веса для формирования приемного луча из принятого сигнала, принимаемого множеством приемных антенн с использованием решетки приемных антенн. Способ содержит этапы формирования сжатого сигнала посредством сжатия спектра принятого сигнала; формирования приемного луча с использованием веса, сформированного заранее заданным методом, и формирования выходного сигнала посредством применения сформированного приемного луча к сжатому сигналу; вычисления функции стоимости для минимизации значения ошибки, представляющего разность между полезным принятым сигналом и выходным сигналом; выполнения операции управления из условия, что вес вычисляется с использованием первого метода, если разность между значением ошибки в текущее время и значением ошибки в предыдущее время является большей, чем абсолютное значение первого порогового значения, либо значение ошибки в текущее время является большим либо равным второму пороговому значению; и выполнения операции управления из условия, что вес вычисляется с использованием второго метода, если разность между значением ошибки в текущее время и значением ошибки в предыдущее время является меньшей или равной абсолютному значению первого порогового значения, а значение ошибки в текущее время является меньшим, чем второе пороговое значение.
В соответствии с седьмым аспектом настоящего изобретения предложен способ формирования веса для формирования приемного луча из принятого сигнала, принимаемого множеством приемных антенн с использованием решетки приемных антенн. Способ содержит этапы формирования сжатого сигнала посредством сжатия принятого сигнала; формирования приемного луча с использованием веса, сформированного заранее заданного метода, и формирования выходного сигнала посредством применения сформированного приемного луча к сжатому сигналу; вычисления корреляционных матриц приема с использованием опорного принятого сигнала и сжатого сигнала и вычисления функции стоимости для минимизации значения ошибки, представляющего разность между выходным сигналом и полезным принятым сигналом; выполнения операции управления из условия, что вес вычисляется с использованием первого метода, если разность между значением ошибки в текущее время и значением ошибки в предыдущее время является большей, чем абсолютное значение первого порогового значения, либо значение ошибки в текущее время является большим или равным второму пороговому значению; и выполнения операции управления из условия, что вес вычисляется с использованием второго метода, если разность между значением ошибки в текущее время и значением ошибки в предыдущее время является меньшей либо равной абсолютному значению первого порогового значения, а значение ошибки в текущее время является меньшим, чем второе пороговое значение.
В соответствии с восьмым аспектом настоящего изобретения предложен способ формирования сигнала приемного луча из принятого сигнала, принимаемого множеством приемных антенн с использованием решетки приемных антенн. Способ содержит этапы формирования сжатого сигнала посредством сжатия принятого сигнала; формирования сигнала приемного луча с использованием сжатого сигнала и весового сигнала; и формирования сигнала приемного луча с использованием первого метода, если разность между значением ошибки текущего весового сигнала, сформированного соответственно сжатому сигналу, соответствующему количеству итераций в текущее время, и значением ошибки предыдущего весового сигнала, сформированного по сжатому сигналу, соответствующему количеству итераций в предыдущее время, является большей, чем абсолютное значение первого порогового значения, либо значение ошибки текущего весового сигнала является большим или равным второму пороговому значению, и формирования сигнала приемного луча с использованием второго метода, если разность между значением ошибки текущего весового сигнала и значением ошибки предыдущего весового сигнала является меньшей либо равной абсолютному значению первого порогового значения, а значение ошибки текущего весового сигнала является меньшим, чем второе пороговое значение.
Краткое описание чертежей
Вышеприведенные и другие цели, признаки и преимущества настоящего изобретения поясняются в следующем подробном описании со ссылками на чертежи, на которых:
фиг.1 - структурная схема, иллюстрирующая структуру приемника базовой станции в традиционной системе мобильной связи CDMA;
фиг.2 - структурная схема, иллюстрирующая структуру приемника базовой станции согласно первому варианту осуществления настоящего изобретения;
фиг.3 - блок-схема последовательности операций способа, иллюстрирующая процедуру приема сигнала приемником базовой станции согласно первому варианту осуществления настоящего изобретения;
фиг.4 - структурная схема, иллюстрирующая структуру приемника базовой станции согласно второму варианту осуществления настоящего изобретения;
фиг.5 - блок-схема последовательности операций способа, иллюстрирующая процедуру приема сигнала приемником базовой станции согласно второму варианту осуществления настоящего изобретения;
фиг.6 - диаграмма, иллюстрирующая CM-метод в системе мобильной связи OFDM;
фиг.7 - диаграмма, схематически иллюстрирующая DD-метод в системе мобильной связи OFDM, использующей двухпозиционную фазовую манипуляцию (BPSK);
фиг.8 - график, иллюстрирующий условие перехода с этапа сходимости на этап стабилизации согласно варианту осуществления настоящего изобретения;
фиг.9 - график, иллюстрирующий характеристическую кривую для способа обычного формирования весов и способа двухэтапного формирования весов согласно варианту осуществления настоящего изобретения;
фиг.10 - график, иллюстрирующий характеристическую кривую согласно количеству приемных антенн приемника базовой станции для способа 2-этапного формирования весов согласно вариантам осуществления настоящего изобретения; и
фиг.11 - структурная схема, иллюстрирующая структуру системы мобильной связи OFDM согласно варианту осуществления настоящего изобретения.
Подробное описание предпочтительного варианта осуществления
Некоторые предпочтительные варианты осуществления настоящего изобретения далее подробно описаны со ссылкой на прилагаемые чертежи. На чертежах одинаковые или подобные элементы обозначены идентичными ссылочными позициями, даже если они изображены на разных чертежах. В последующем описании подробное описание известных функций и конфигураций опущено для краткости.
Перед описанием настоящего изобретения будет рассмотрена модель принятого сигнала, принимаемого приемником базовой станции (БС). Предполагается, что приемник БС включает в себя приемную антенную решетку, содержащую множество приемных антенн (Rx ANT), причем приемная антенная решетка обычно устанавливается только в приемник БС, принимая во внимание ее стоимость и размер, и не устанавливается в приемник мобильной станции (МС). То есть допускается, что приемник МС включает в себя только одну приемную антенну. Хотя настоящее изобретение может быть применено ко всем системам мобильной связи, использующим множественный доступ с частотным разделением каналов (FDMA), множественный доступ с временным разделением каналов (TDMA), множественный доступ с кодовым разделением каналов (CDMA) и мультиплексирование с ортогональным частотным разделением каналов (OFDM), настоящее изобретение описано ниже со ссылкой на систему мобильной связи, использующую OFDM (далее - «система мобильной связи OFDM»).
Сигнал, переданный из передатчика m-той МС в сотовой ячейке, обслуживаемой БС, выражается как

В уравнении (2) sm(t) обозначает передаваемый сигнал m-той МС, pm обозначает мощность передачи m-той МС, bm(t) обозначает пользовательскую информационную битовую последовательность m-той МС, и cm(t) обозначает пользовательскую кодовую последовательность расширения спектра m-той МС, имеющую период Tc символа шумоподобной последовательности.
Передаваемый сигнал, переданный из передатчика МС, принимается в приемнике БС через векторный канал многолучевого распространения. Предполагается, что параметры канала векторного канала многолучевого распространения изменяются медленно в сравнении с битовым периодом Tb. Поэтому допускается, что параметры канала векторного канала многолучевого распространения являются постоянными для определенных битовых периодов. Комплексный принятый сигнал базовой полосы для первого сигнала многолучевого распространения m-той МС, принятого приемником БС, выражается уравнением (3). Следует отметить, что принятый сигнал согласно уравнению (3) представляет сигнал базовой полосы, определенный посредством преобразования с понижением частоты радиочастотного (РЧ) сигнала, принятого приемником БС.

В уравнении (3) xmlобозначает набор комплексных принятых сигналов базовой полосы, принятых посредством первой многолучевой составляющей m-той МС, αml обозначает коэффициент затухания из-за замирания, примененный к первой многолучевой составляющей m-той МС, φml обозначает фазовый переход, примененный к первой многолучевой составляющей m-той МС, τml обозначает временную задержку, примененную к первой многолучевой составляющей m-той МС, и αml обозначает множество откликов решетки (AR), примененных к первой многолучевой составляющей m-той МС. Поскольку приемник БС включает в себя множество N приемных антенн, переданный m-той МС сигнал принимается в приемнике БС через N приемных антенн. Следовательно, количество сигналов, принятых посредством первой многолучевой составляющей, равно N, и N комплексных принятых сигналов базовой полосы, принимаемых посредством первой многолучевой составляющей m-той МС, составляют набор принятых сигналов. Здесь для удобства разъяснения термин «набор» будет опущен, и подчеркнутые параметры представляют наборы соответствующих элементов.
Когда применяется данная линейная антенная решетка, отклик αmlрешетки определяется как

В уравнении (4) «d» обозначает расстояние между отдельными приемными антеннами, λ обозначает длину волны в используемой полосе частот, N обозначает количество приемных антенн и θml обозначает направление прихода (DOA), применяемое к первой многолучевой составляющей m-той МС.
Предполагается, что количество МС в сотовой ячейке, обслуживаемой БС, равно M, и существуют L путей многолучевого распространения для каждой из M МС, принятый сигнал, принимаемый на БС, является суммой переданных сигналов, передаваемых от M МС, и аддитивного белого шума (AWN):

В уравнении (5) n(t) обозначает аддитивный белый шум, добавленный к сигналам, переданным от M МС.
Предполагается, что сигналом, который желательно принять в БС, в принятом сигнале согласно уравнению (5), является x11.x11 представляет сигнал первой МС, переданный посредством первой многолучевой составляющей. Поскольку предполагается, что сигналом, который желательно принять в БС, является x11, то все сигналы за исключением сигнала x11 считаются сигналами взаимной помехи и шумами. Соответственно, уравнение (5) может быть представлено как

В уравнении (6) i(t) обозначает сигнал взаимной помехи, который определяется следующим образом:

Первый член уравнения (7) является сигналом передачи МС, который желательно принять в БС, но представляет межлучевую помеху (IPI) от других путей многолучевого распространения, не желательных для приема в БС. Второй член уравнения (7) представляет помехи множественного доступа (MAI), обусловленные другими МС.
Кроме того, x(t) сжимается с использованиемкода c1(t-τ11) сжатия, заранее заданного в первом отводе (l=1) для соответствующей составляющей многолучевого распространения в соответствующей карте каналов приемника БС, то есть карте (m=l) каналов, назначенной первой МС, а сжатый сигнал y(t) определяется согласно уравнению (8). Код c1(t-τ11) сжатия идентичен коду c1(t-τ11) сжатия, используемому в передатчике БС во время передачи сигнала. БС содержит множество приемников, описанных в связи с фиг.1, каждый из приемников назван «картой каналов», и одна карта канала назначена одной МС. Как описано в связи с фиг.1, карта каналов включает в себя число отводов, равное числу путей многолучевого распространения, и отводы поставлены в соответствие соответствующим сигналам многолучевого распространения на взаимнооднозначной основе

В уравнении (8) «k» обозначает k-тую точку дискретизации.
Когда сигнал y(t) формируется посредством сжатия подлежащего сжатию сигнала x(t) с использованием кода c1(t-τ11) сжатия, мощность компоненты сигнала, желательной для приема приемником из числа принятых сигналов, усиливается с коэффициентом усиления G согласно характеристике устройства сжатия. Хотя мощность компоненты сигнала, желательной для приема приемником БС, усиливается с коэффициентом G усиления обработки, мощность компонент сигнала, которые нежелательно принимать приемнику БС, не изменяется. Поэтому может быть рассчитана корреляционная матрица между принятым сигналом до сжатия и принятым сигналом после сжатия. Для вычисления корреляционной матрицы между принятым сигналом до сжатия и принятым сигналом после сжатия принятый сигнал x(t) до сжатия дискретизируется в k-ой точке, которая соответствует моменту дискретизации принятого сигнала y(t) после сжатия. Сигнал, полученный дискретизацией принятого сигнала x(t) до сжатия в k-той точке, имеет вид:

Таким образом, для вычисления корреляционной матрицы между принятым сигналом x(t) до сжатия и принятым сигналом y(t) после сжатия допускается, что сигнал согласно уравнению (9) получается посредством дискретизации принятого сигнала x(t) до сжатия в k-той точке, которая соответствует точке дискретизации принятого сигнала y(t) после сжатия, и что принятый сигнал x(t) досжатияипринятый сигнал y(t) после сжатия являются стационарными.
Ниже описан 2-этапный способ наименьшего среднеквадратичного значения (LMS) и 2-этапного способа минимальной среднеквадратичной ошибки (MMSE).
Сначала будет описан 2-этапный способ LMS. Набор принятых сигналов до сжатия, включающий комплексные принятые сигналы, принимаемые посредством N приемных антенн в конкретное время, то есть комплексные принятые сигналы с x1 по xN, принятые посредством антенн с первой приемной антенны по N-ную приемную антенну, определен как x=[X1,X2,···,XN]T. При этом 'T' является оператором, означающим операцию транспонирования. Дополнительно, набор принятых сигналов после сжатия комплексных принятых сигналов x1, x2, ···, xN, принимаемых посредством N приемных антенн, определен как y=[y1,y2,···,yN]T. Принятый сигнал yпосле сжатия определяется суммой компоненты sсигнала, желательной для приема приемником БС, и компоненты uсигнала, не желательной для приема приемником БС, в следующем виде:

Набор комплексных значений весов, на которые должны умножаться комплексные принятые сигналы x1, x2,···, xN, принимаемые посредством N приемных антенн, то есть комплексные веса с w1 - wN, на которые должны умножаться комплексные сигналы с x1 - xN,принимаемые посредством антенн с первой приемной антенны по N-ную приемную антенну, определяется как w=[w1,w2,···,wN]T.
Выходной сигнал zс отводов на конкретной пользовательской карте, то есть карте каналов, назначенной конкретной МС, определяется посредством вычисления скалярного произведения веса w и принятого сигнала y после сжатия в следующем виде:

В уравнении (11) 'i' обозначает количество приемных антенн.
Выходной сигнал z может быть классифицирован на компоненту wHs сигнала, которую желательно принять приемнику БС, и компоненту wHu сигнала, которую нежелательно принимать приемнику БС, с использованием уравнения (10) и уравнения (11). Метод LMS сводит к минимуму ошибки известного опорного сигнала и принятого сигнала и, в частности, сводит к минимуму функцию стоимости J(w), данную ниже.

В уравнении (12) 'J' обозначает функцию стоимости, и значение веса wдолжно быть определено для сведения к минимуму значения функции J стоимости. Дополнительно, в уравнении (12) ek обозначает различие, либо ошибку, между принятым сигналом и полезным принятым сигналом, и dk обозначает полезный сигнал. В алгоритме формирования луча, использующем метод с подтверждением приема, используется пилот-сигнал в качестве полезного сигнала dk, в качестве примера. Однако настоящее изобретение предлагает алгоритм формирования луча, использующий метод без подтверждения приема, так что подробное описание алгоритма формирования луча, использующего метод с подтверждением приема, не приводится.
В уравнении (12) функция J стоимости является разновидностью выпуклой функции второго порядка. Следовательно, для того чтобы свести к минимуму функцию J стоимости, функция J стоимости должна быть продифференцирована, чтобы ее значение стало 0. Продифференцированное значение функции J стоимости равно

Однако трудно получить оптимальный вес woptв реальной среде канала в отдельном процессе, и так как принятый сигнал yпосле сжатия вводится в каждой точке, рекурсивную формулу согласно уравнению (14) следует использовать для того, чтобы адаптивно или рекурсивно получить оптимальный вес wopt.

В уравнении (14) 'k' обозначает k-тую точку, wkобозначает вес в k-той точке, μ обозначает коэффициент усиления и vkобозначает вектор следа в k-той точке. Вектор vkследа (пути) в k-той точке представляет вектор для сходимости продифференцированного значения функции J стоимости к минимальному значению, например 0.
То есть уравнение (14) показывает процесс обновления значения, сформированного до или после постоянного коэффициента μ усиления из данного веса wk, который необходимо использовать в данной точке в направлении вектора vkследа, как веса wk+1, который необходимо использовать в следующей точке.
Дополнительно, принимая во внимание среднеквадратичное значение (МС), уравнение (14) принимает вид:

Ниже описан 2-этапный способ MMSE. Способ MMSE является способом сведения к минимуму ошибок опорного сигнала и принятого сигнала, в частности сведения к минимуму функции J(w) стоимости из уравнения (16).

В уравении (16) J обозначает функцию стоимости, и значение «w»должно быть вычислено для сведения к минимуму значения функции J стоимости. Так как принятый сигнал yпосле сжатия вводится в каждой точке, как описано в связи с 2-этапным способом LMS, должна использоваться рекурсивная формула уравнения (17), чтобы адаптивно или рекурсивно получить оптимальный вес wopt.


Как описано в связи с рекурсивной формулой для 2-этапного способа LMS, то есть рекурсивной формулы уравнения (14), в уравнении (17) 'k' обозначает k-тую точку, wk обозначает вес в k-той точке, μ обозначает коэффициент усиления и vk обозначает вектор следа в k-той точке.
То есть уравнение (17) показывает процесс обновления значения, сформированного до или после коэффициента μ усиления из данного веса wk, который необходимо использовать в данной точке в направлении вектора vkследа, как веса wk+1, который необходимо использовать в следующей точке. Дополнительно, принимая во внимание среднеквадратическую ошибку (MSE), уравнение (17) принимает вид:

В уравнении (18) функция J стоимости выражается как

В уравнении (19) 'R' обозначает автокорреляционную матрицу R=E[y(k)yH(k)] принятого сигнала и 'P' обозначает взаимную корреляцию P=E[y(k)d*(k)]между принятым сигналом и полученным принятым сигналом.
Операция получения оптимального веса wopt, как описано выше, действует как наиболее важный фактор для формирования приемного луча. Настоящее изобретение сводит к минимуму ошибки опорного сигнала и принятого сигнала, используя 2-этапный способ LMS и 2-этапный способ MMSE. То есть настоящее изобретение получает оптимальный вес woptпосредством получения веса wдля сведения к минимуму значения функции J стоимости, описанной в связи с уравнением (12) и уравнением (16). Таким образом, настоящее изобретение предлагает новый способ обнаружения полезного принятого сигнала d(k) в соответствии с (12) и (16).
Способ обнаружения полезного принятого сигнала d(k), предлагаемый в настоящем изобретении, называется «слепым методом». Вследствие использования данного метода без подтверждения приема для принятого сигнала должна обеспечиваться адаптивная сходимость с использованием конкретного оценочного значения, и 2-этапный d(k) применяется для адаптивной сходимости принятого сигнала. Использование 2-этапного d(k) означает, что d(k) получается посредством первого этапа, представляющего собой этап сходимости, и второго этапа, представляющего собой этап стабилизации.
Первый этап, представляющий собой этап сходимости, описан ниже.
Вначале будет описан метод постоянного модуля (CM), применяемый для адаптивной сходимости принятого сигнала. Метод CM был предложен Годардом (Godard) и обычно применяется в корректоре без подтверждения приема, а также применяется для алгоритма формирования. При использовании предложенного Годардом метода CM функция J стоимости выражается следующим образом

В уравнении (20) 'p' обозначает конкретное положительное целое число, и Rp обозначает модуль Годарда. Модуль Годарда определяется следующим образом

Поскольку современная система мобильной связи OFDM обычно применяет схему модуляции высокого порядка, более высокого порядка, чем квадратурная фазовая манипуляция (QPSK), функция J стоимости разделяется на действительную часть и мнимую часть, как показано в (22). Причиной того, почему функция J стоимости разделяется на действительную часть и мнимую часть, является то, что вследствие применения схемы модуляции высокого порядка сигналы приема/передачи имеют действительную часть и мнимую часть.

Предполагается, что в настоящем изобретении использован 2-этапный способ LMS и 2-этапный способ MMSE, и p=2. Поэтому d(k)=R2,R+jR2,I. Также предполагается, что значение функции J стоимости в начальной точке, то есть в точке k=0, равно 0 (J=0). Это описано со ссылкой на фиг.6.
Фиг.6 является диаграммой, иллюстрирующей метод CM в системе мобильной связи OFDM. На фиг.6 показан метод CM для p=2, d(k)=R2,R+jR2,I, и J=0 в точке с k=0. То есть, если значение R2 определяется согласно (22), на координатной поверхности образуется окружность. Тогда принятый сигнал определяется как точка, где продолжение линии, проходящей через начало координат, пересекает эту окружность. На фиг.6 принятый сигнал zk проецируется как окружность.
Выше описан этап сходимости. Далее будет описан второй этап, представляющий собой этап стабилизации для получения d(k).
Если MSE сходится к заранее установленному значению в течение этапа сходимости, то происходит переход от этапа сходимости к этапу стабилизации, где выполняется вычисление уравнения (23). Процесс, где происходит переход от этапа сходимости к этапу стабилизации, когда MSE сходится к заранее установленному значению, описан ниже.

На этапе стабилизации, подобно этапу сходимости, действительная часть и мнимая часть вычисляются отдельно. В уравнении (23) Pr означает, что принятый сигнал проектируется как сигнал, максимально аппроксимилирующий полезный принятый сигнал d(k) по DD-методу. DD-метод является методом отражения d(k) в качестве значения решения, максимально аппроксимирующего принятый сигнал. DD-метод описан ниже со ссылкой на фиг.7.
Фиг.7 является диаграммой, иллюстрирующей DD-метод в системе мобильной связи OFDM, использующей двухпозиционную фазовую манипуляцию (BPSK). Согласно фиг.7, так как предполагается, что система мобильной связи применяет PSK, если принятый сигнал равен (1.2-0.2) в области I-Q, полезный принятый сигнал d(k) проектируется как значение, максимально аппроксимирующее 1, после вычисления интервала от +1 и -1.
Фиг.2 является блок-схемой, иллюстрирующей структуру приемника БС, согласно первому варианту осуществления настоящего изобретения. Согласно фиг.2 приемник БС по первому варианту осуществления настоящего изобретения сходен по структуре с приемником БС, описанным в связи с фиг.1, но различается способом определения веса процессором сигналов. Для упрощения описаны только элементы, непосредственно относящиеся к настоящему изобретению, в приемнике БС со ссылкой на фиг.2. Первый вариант осуществления настоящего изобретения соответствует варианту осуществления, где применяется метод LMS.
Согласно фиг.2, когда принятый сигнал xk принимается в точке k, устройство 210 сжатия сжимает принятый сигнал xk, применяя заранее установленный код сжатия, и выводит сжатый принятый сигнал ykна процессор 230 сигналов и генератор 220 приемного луча. Процессор 230 сигналов содержит вычислитель 231 веса, память 233 и определитель 235 сходимости. Для упрощения фиг.2 описана со ссылкой только на первый отвод 140-1 в приемнике БС по фиг.1. Поэтому устройство 210 фиг.2 сжатия в основном идентично в функционировании N устройствам сжатия, с первого устройства 141 сжатия по N-ное устройство 143 сжатия в первом отводе 140-1.
Вычислитель 231 веса в процессоре 230 сигналов вычисляет вес wk посредством приема сжатого принятого сигнала yk, заранее установленного постоянного коэффициента μ усиления, начального веса w0 и сигнала zk отвода, выведенного из формирователя 220 приемного луча, и выводит вычисленный вес в память 233. Память 233 буферизует вес wk, вычисленный вычислителем 231 веса, и вычислитель 231 веса применяет вес wk, сохраненный в памяти 233 при обновлении веса wk. То есть вычислитель 231 веса обновляет вес wk+1в следующей точке k+1, используя вес wk, вычисленный в точке k. Вычислитель 231 веса вычисляет вес под контролем определителя 235 сходимости. То есть определитель 235 сходимости определяет метод, которым вычислитель 231 веса вычисляет вес wk. Метод вычисления веса wkклассифицируется на CM-метод и DD-метод. Процесс выбора из CM-метода и DD-метода определителем 235 сходимости описан ниже.
Как описано выше, поскольку настоящее изобретение применяет 2-этапный d(k), выполняются два этапа: этап сходимости и этап стабилизации. CM-метод имеет недостаток, заключающийся в том, что он имеет низкую скорость сходимости, а DD-метод имеет недостаток, заключающийся в том, что он имеет высокий процент ошибок сходимости. Поэтому настоящее изобретение выполняет операцию управления из условия, что CM-метод и DD-метод применяются для этапа сходимости и этапа стабилизации согласно их характеристикам, тем самым обеспечивая быструю сходимость к малому значению MSE. Таким образом, процесс различения этапа сходимости и этапа стабилизации действует как очень важный фактор в повышении производительности.
Настоящее изобретение применяет следующий способ для различения этапа сходимости и этапа стабилизации.
MSE во временном интервале t=1, 2, 3, 4, ... будет определяется как «St». То есть St представляет MSE для сигнала, принятого в конкретное время 't'. В этом случае для различения этапа сходимости и этапа стабилизации разница между St в настоящий момент времени t=t и St-1 в следующий момент времени t=t-1 будет определена как «dt». Разница dt между St и St-1 определяется следующим образом:

То есть возникает переход от этапа сходимости к этапу стабилизации, если dt имеет значение меньше либо равное абсолютному значению первого порогового значения  Первое пороговое значение dp есть заранее установленное значение, соответствующее системе мобильной связи OFDM. Таким образом, когда разница dt между St и St-1 очень мала, возникает переход от этапа сходимости к этапу стабилизации.
Первое пороговое значение dp есть заранее установленное значение, соответствующее системе мобильной связи OFDM. Таким образом, когда разница dt между St и St-1 очень мала, возникает переход от этапа сходимости к этапу стабилизации.
Фиг.8 является графиком, иллюстрирующим условие перехода от этапа сходимости к этапу стабилизации, согласно варианту осуществления настоящего изобретения. На фиг.8, показано, что разница между MSE St-1 before принятого сигнала в конкретное время t-1 предыдущей длительности и MSE St before принятого сигнала в текущее время t предыдущей длительности есть dt before, и разница между MSE St-1 after принятого сигнала в конкретное время t-1 следующей длительности и MSE St after принятого сигнала в текущее время t следующей длительности есть dt after. На фиг.8 вертикальная ось представляет уровень ошибки и горизонтальная ось представляет число итераций. Следовательно, «предыдущая длительность» означает длительность с меньшим числом итераций, а «следующая длительность» означает длительность с большим числом итераций. Так как разница dt before между St-1 before и St before предыдущей длительности имеет значение, превышающее абсолютное значение первого порогового значения dp, этап сходимости поддерживается на предыдущей длительности. Так как разница dt after между St-1 after и St after следующей длительности имеет значение, меньшее чем абсолютное значение первого порогового значения dp, возникает переход к этапу стабилизации на следующей длительности. Тем не менее, когда возникает переход к этапу стабилизации на основе только абсолютного значения первого порогового значения dp, начальная область сходимости не различается. Для того чтобы различать начальную область сходимости, определяется второе пороговое значение dp_reference, и переход от этапа сходимости к этапу стабилизации осуществляется, когда St имеет значение меньшее, чем второе пороговое значение dp_reference, тогда как dt имеет значение меньше либо равное абсолютному значению первого порогового значения  St<dp_reference).
St<dp_reference).
Согласно фиг.2 с использованием разницы dt между St и St-1 определитель сходимости определяет, должен ли вычислитель 231 веса применять CM-метод или DD-метод согласно тому, обеспечена ли сходимость значения MSE принятого сигнала к первому пороговому значению dp, и St меньше, чем второе пороговое значение dp_reference. То есть определитель 235 сходимости позволяет вычислителю 231 веса применять CM-метод на этапе сходимости и позволяет вычислителю 231 веса применять DD-метод на этапе стабилизации.
Фиг.3 является блок-схемой последовательности операций способа, иллюстрирующей процедуру приема сигнала приемником БС, согласно первому варианту осуществления настоящего изобретения. Согласно фиг.3 на этапе 311 приемник БС устанавливает начальный вес w0, постоянный коэффициент μ усиления, первое пороговое значение dp и второе пороговое значение dp_reference и устанавливает как начальную матрицу автокорреляции R(0) принятого сигнала xk, так и начальную матрицу взаимной корреляции P(0) между принятым сигналом xkи полезным принятым сигналом dk в '0', и затем переходит к этапу 313. На этапе 313 приемник БС определяет, завершена ли связь. Если определено, что связь завершена, приемник БС завершает осуществляемую процедуру.
Если на этапе 313 определено, что связь не завершена, приемник БС переходит к этапу 315. На этапе 315 приемник БС принимает сжатый сигнал ykдля принятого сигнала xk и затем переходит к этапу 317. На этапе 317 приемник БС вычисляет множество zkсигналов zk с соответствующих отводов приемника БС с использованием сжатого сигнала ykи веса wk (zk = wH kyk) и затем переходит к этапу 319. zk представляет множество выходных сигналов отвода, сформированных с использованием приемного луча, сформированного с использованием веса wk. На этапе 319 приемник БС вычисляет функцию ek ошибки и разницу между принятым сигналом xkи полезным принятым сигналом dk по СМ-методу (ek=dk,CM-zk), так как приемник БС изначально находится на этапе сходимости, и затем переходит к этапу 321.
На этапе 321 приемник БС вычисляет продифференцированное значение функции стоимости, используя сжатый сигнал ykи функцию ошибки еk (▿J(wk)=-2e*k yk), и затем переходит к этапу 323. На этапе 323 приемник БС вычисляет коэффициент формирования луча, или вес  (wk = wk-1 - μyk e*k), и затем переходит к этапу 325. На этапе 325 приемник БС определяет, удовлетворяет ли разница dt между St и St-1 условию сходимости, то есть является ли dt меньшим или равным абсолютному значению первого порогового значения dp, и St является меньшим второго порогового значения
(wk = wk-1 - μyk e*k), и затем переходит к этапу 325. На этапе 325 приемник БС определяет, удовлетворяет ли разница dt между St и St-1 условию сходимости, то есть является ли dt меньшим или равным абсолютному значению первого порогового значения dp, и St является меньшим второго порогового значения  Если dt больше, чем абсолютное значение первого порогового значения dp, или St больше либо равно второму пороговому значению dp_reference, приемник БС переходит к этапу 327. На этапе 327 приемник БС сохраняет вычисленный вес wk и переходит к этапу 329. На этапе 329 приемник БС задерживается на заранее установленный интервал времени и затем переходит к этапу 331. Причиной задержки на заранее установленный интервал времени является применение значения, определенного для k-той выборки, для (k+1)ой выборки, то есть чтобы принять во внимание задержку при смене состояния. На этапе 331 приемник БС увеличивает k на 1, то есть переходит от текущей точки k к следующей точке k+1, и затем возвращается к этапу 313.
Если dt больше, чем абсолютное значение первого порогового значения dp, или St больше либо равно второму пороговому значению dp_reference, приемник БС переходит к этапу 327. На этапе 327 приемник БС сохраняет вычисленный вес wk и переходит к этапу 329. На этапе 329 приемник БС задерживается на заранее установленный интервал времени и затем переходит к этапу 331. Причиной задержки на заранее установленный интервал времени является применение значения, определенного для k-той выборки, для (k+1)ой выборки, то есть чтобы принять во внимание задержку при смене состояния. На этапе 331 приемник БС увеличивает k на 1, то есть переходит от текущей точки k к следующей точке k+1, и затем возвращается к этапу 313.
Однако, если на этапе 325 определяется, что dt меньше либо равно абсолютному значению первого порогового значения dp и St меньше, чем второе пороговое значение dp_reference, приемник БС переходит к этапу 333. На этапе 333 приемник БС задерживается на заранее установленный интервал времени и затем переходит к этапу 335. Также причиной задержки на заранее установленный интервал времени является принятие во внимание задержки при смене состояния. На этапе 335 приемник БС увеличивает k на 1, то есть переходит от текущей точки k к следующей точке k+1, и затем возвращается к этапу 337. На этапе 337 приемник БС определяет, завершена ли связь. Если определено, что связь завершена, то приемник БС завершает осуществляемую процедуру.
Если на этапе 337 определено, что связь не завершена, приемник БС переходит к этапу 339. На этапе 339 приемник БС вычисляет функцию ek ошибки и разницу между принятым сигналом xkи полезным принятым сигналом dk по DD-методу (ek=dk,DD-zk), так как приемник БС в текущее время находится на этапе стабилизации, и затем переходит к этапу 341. На этапе 341 приемник БС вычисляет продифференцированное значение функции стоимости, используя сжатый сигнал ykи функцию ошибки  и затем переходит к этапу 343. На этапе 343 приемник БС вычисляет коэффициент формирования луча, или вес
и затем переходит к этапу 343. На этапе 343 приемник БС вычисляет коэффициент формирования луча, или вес 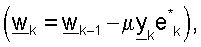 и затем переходит к этапу 345. На этапе 345 приемник БС сохраняет вычисленный вес wk и переходит к этапу 333.
и затем переходит к этапу 345. На этапе 345 приемник БС сохраняет вычисленный вес wk и переходит к этапу 333.
Фиг.4 является блок-схемой, иллюстрирующей структуру приемника БС, согласно второму варианту осуществления настоящего изобретения. При описании фиг.4 следует отметить, что приемник БС согласно второму варианту осуществления настоящего изобретения сходен по структуре с приемником БС, показанным на фиг.1, но различается по способу определения веса процессором сигналов. Для упрощения со ссылкой на фиг.4 описаны только элементы, непосредственно относящиеся к настоящему изобретению, в приемнике БС. Второй вариант осуществления настоящего изобретения соответствует варианту осуществления с использованием метода MMSE.
Согласно фиг.4, когда сигнал xk принимается в точке k, устройство 410 сжатия сжимает принятый сигнал xk, применяя заранее установленный код сжатия, и выводит сжатый принятый сигнал ykна процессор 430 сигналов и формирователь 420 приемного луча. Процессор 430 сигналов содержит вычислитель 431 корреляционной матрицы приема, вычислитель 433 веса, память 435, определитель сходимости 437 и память 439. Для упрощения фиг.4 описана со ссылкой только на первый отвод 140-1 в приемнике БС по фиг.1. Поэтому устройство 410 сжатия в основном идентично по функционированию N устройствам сжатия с первого 141 по N-ное устройство 143 сжатия в первом отводе 140-1. Вычислитель 431 корреляционной матрицы приема процессора 430 принимает сжатый принятый сигнал yk, вычисляет корреляционную матрицу приема с использованием заранее установленного постоянного коэффициента μ усиления и буферизует вычисленную корреляционную матрицу приема в памяти 439. Память 439 буферизирует корреляционную матрицу приема, вычисленную вычислителем 431 корреляционной матрицы приема, и вычислитель 431 корреляционной матрицы приема использует корреляционную матрицу приема, сохраненную в памяти 439, при обновлении корреляционной матрицы приема, буферизированной в ней. Термин «корреляционная матрица» относится к матрице R автокорреляции и матрице P взаимной корреляции.
Вычислитель 433 весов вычисляет вес wk посредством приема сжатого принятого сигнала yk, заранее заданного постоянного коэффициента μ усиления, начального веса w0 и сигнала zk отвода, выведенного из формирователя 420 приемного луча, и выводит вычисленный вес в память 435. Память 435 буферизирует вес wk, вычисленный вычислителем 433 весов, а вычислитель 433 весов использует вес wk, сохраненный в памяти 453, при обновлении веса wk. То есть вычислитель 433 весов обновляет вес wk+1 в следующей точке k+1 с использованием wk, вычисленного в точке k. Вычислитель 433 весов вычисляет вес под управлением определителя 437 сходимости по способу, описанному в связи с первым вариантом осуществления настоящего изобретения. То есть, как описано в первом варианте осуществления, определитель 437 сходимости определяет метод, которым вычислитель 433 весов будет вычислять вес wk.
Фиг.5 - блок-схема алгоритма, иллюстрирующая процедуру приема сигнала приемником БС, согласно второму варианту осуществления настоящего изобретения. Согласно фиг.5 на этапе 511 приемник БС устанавливает начальный вес w0, постоянный коэффициент μ усиления, первое пороговое значение dp, второе пороговое значение dp_reference и устанавливает в «0» как матрицу R(0) автокорреляции принятого сигнала xk, так и начальную матрицу P(0) взаимной корреляции между принятым сигналом xk и полезным принятым сигналом dk, и затем переходит к этапу 513. На этапе 513 приемник БС определяет, завершена ли передача данных. Если он определяет, что передача данных завершена, приемник БС заканчивает текущую процедуру.
Если на этапе 513 определено, что передача данных не завершена, приемник БС переходит к этапу 515. На этапе 515 приемник БС принимает сжатый сигнал ykдля принятого сигнала xk, а затем переходит к этапу 517. На этапе 517 приемник БС вычисляет набор zkсигналов zk с отводов приемника БС с использованием сжатого сигнала ykи веса wk(zk=wH kyk), а затем переходит к этапу 519. zk представляет набор выходных сигналов отводов, сформированных с использованием приемного луча. На этапе 519 приемник БС вычисляет корреляционные матрицы приема, то есть матрицу Rk автокорреляции и матрицу Pk взаимной корреляции согласно CM-методу, поскольку приемник БС первоначально находится на этапе сходимости, а затем переходит к этапу 521. Последовательность операций вычисления матрицы Rk автокорреляции и матрицы Pk взаимной корреляции выражается следующим образом:

где «f» - показатель последействия и указывает значение только непосредственно предшествующего этапа.
На этапе 521 приемник БС вычисляет продифференцированное значение функции стоимости, используя матрицу Rk автокорреляции и матрицу Pk взаимной корреляции (ΔJ(wk)=Rkwk-1 - Pk), a затем переходит к этапу 523. На этапе 523 приемник БС вычисляет коэффициент формирования луча, или вес (wk = wk-1 - μΔJ(wk)), а затем переходит к этапу 525. На этапе 525 приемник БС определяет, удовлетворяет ли разность dt между St и St-1 условию сходимости, то есть является ли dt меньшим или равным абсолютному значению первого порогового значения dp, а St - меньшим, чем второе пороговое значение  Если dt является меньшим или равным абсолютному значению первого порогового значения dp, а St является меньшим или равным второму пороговому значению dp_reference, то есть если dt является большим, чем абсолютное значение первого порогового значения dp, либо St является большим или равным второму пороговому значению dp_reference, приемник БС переходит на этап 527. На этапе 527 приемник БС сохраняет вычисленный вес wk и переходит на этап 529. На этапе 529 приемник БС осуществляет задержку на заранее заданный интервал времени, а затем переходит на этап 531. Причина осуществления задержки на заранее заданный интервал времени заключается в том, что следует учесть задержку смены состояний. На этапе 531 приемник БС увеличивает k на 1, то есть переходит от текущей точки k к следующей точке k+1, а затем возвращается на этап 513.
Если dt является меньшим или равным абсолютному значению первого порогового значения dp, а St является меньшим или равным второму пороговому значению dp_reference, то есть если dt является большим, чем абсолютное значение первого порогового значения dp, либо St является большим или равным второму пороговому значению dp_reference, приемник БС переходит на этап 527. На этапе 527 приемник БС сохраняет вычисленный вес wk и переходит на этап 529. На этапе 529 приемник БС осуществляет задержку на заранее заданный интервал времени, а затем переходит на этап 531. Причина осуществления задержки на заранее заданный интервал времени заключается в том, что следует учесть задержку смены состояний. На этапе 531 приемник БС увеличивает k на 1, то есть переходит от текущей точки k к следующей точке k+1, а затем возвращается на этап 513.
Однако, если на этапе 525 определено, что dt является меньшим или равным абсолютному значению первого порогового значения dp, а St является меньшим, чем второе пороговое значение dp_reference, то приемник БС переходит на этап 533. На этапе 533 приемник БС осуществляет задержку на заранее заданный интервал времени и переходит на этап 535. Также причина для осуществления задержки на заранее заданный интервал времени заключается в том, что следует учесть задержку смены состояний. На этапе 535 приемник БС увеличивает k на 1, то есть переходит от текущей точки k к следующей точке k+1, а затем возвращается на этап 537. На этапе 537 приемник БС определяет, завершена ли передача данных. Если он определяет, что передача данных завершена, приемник БС заканчивает текущую процедуру.
Если на этапе 537 определено, что передача данных не завершена, то приемник БС переходит на этап 539. На этапе 539 приемник БС вычисляет корреляционные матрицы приема, то есть матрицу Rk автокорреляции и матрицу Pk взаимной корреляции согласно DD-методу, поскольку приемник БС в текущий момент находится на этапе стабилизации, а затем переходит на этап 541. Последовательность операций вычисления матрицы Rk автокорреляции и матрицы Pk взаимной корреляции выражается следующим образом:

На этапе 541 приемник БС вычисляет продифференцированное значение функции стоимости, используя матрицу Rk автокорреляции и матрицу Pk взаимной корреляции (ΔJ(wk)=Rkwk-1 - Pk), а затем переходит на этап 543. На этапе 543 приемник БС вычисляет коэффициент формирования луча, или вес  а затем переходит на этап 545. На этапе 545 приемник БС сохраняет вычисленный вес wk и переходит к этапу 533.
а затем переходит на этап 545. На этапе 545 приемник БС сохраняет вычисленный вес wk и переходит к этапу 533.
Со ссылкой на фиг.9 ниже описаны результаты моделирования по способу 2-этапного формирования весов согласно варианту осуществления настоящего изобретения и способу обычного формирования весов.
Фиг.9 - график, иллюстрирующий характеристическую кривую для способа обычного формирования весов и способа 2-этапного формирования весов согласно варианту осуществления настоящего изобретения со ссылкой на фиг.9, следует отметить, что значение MSE в зависимости от количества итераций для способа 2-этапного формирования весов согласно настоящему изобретению сходится к меньшему значению по сравнению со значением MSE в зависимости от количества итераций для способа традиционного формирования весов, например DD-методу. То, что значение MSE сходится к меньшему значению, означает, что приемный луч может быть сформирован корректным образом, обеспечивая возможность корректного приема только полезного принимаемого сигнала.
Со ссылкой на фиг.10 ниже описаны результаты моделирования по характеристике способа 2-этапного формирования весов в соответствии с количеством приемных антенн, для которых используется интеллектуальная антенна.
Фиг.10 - график, иллюстрирующий характеристическую кривую согласно количеству приемных антенн приемника БС для способа 2-этапного формирования весов согласно вариантам осуществления настоящего изобретения. Со ссылкой на фиг.10 проиллюстрирована диаграмма направленности излучения для приемника БС, имеющего 6 приемных антенн, и приемника БС, имеющего 10 приемных антенн. Например, если предполагается, что конкретная БС установлена под углом 57°, то по сравнению с приемником БС, имеющим 6 приемных антенн, приемник БС, имеющий 10 приемных антенн, обладает нормализованным коэффициентом усиления антенны около 0,2 и может более точно формировать приемный луч. Таким образом, в показателях пропускной способности системы мобильной связи OFDM увеличение количества приемных антенн вызывает увеличение амплитуды принимаемых сигналов, обеспечивая возможность корректной передачи данных, тем самым способствуя увеличению пропускной способности системы.
Фиг.11 - структурная схема, иллюстрирующая структуру системы мобильной связи OFDM согласно варианту осуществления настоящего изобретения. Согласно фиг.11 система связи OFDM состоит из передатчика 1100 МС и приемника 1150 БС.
Сначала будет описан передатчик 1100 МС. Передатчик 1100 МС состоит из блока 1111 символьного преобразования, последовательно-параллельного (S/P) преобразователя 1113, блока 1115 вставки последовательности, пилот-сигнала блока 1117 обратного быстрого преобразования Фурье (ОБПФ), параллельно-последовательного (P/S) преобразователя 1119, блока 1121 вставки защитных интервалов, цифроаналогового (Ц/A) преобразователя 1123 и радиочастотного (РЧ) процессора 1125. Если есть информационные биты данных, которые должны быть переданы, информационные биты данных вводятся в блок 1111 символьного преобразования. Блок 1111 символьного преобразования модулирует входные информационные биты данных по заранее заданной схеме модуляции для символьного преобразования и выводит преобразованные в символы биты данных в последовательно-параллельный преобразователь 1113. В качестве схемы модуляции может быть использована квадратурная фазовая манипуляция (QPSK) или 16-позиционная квадратурная амплитудная модуляция (16КАМ, 16QAM). Последовательно-параллельный преобразователь 1113 преобразует в параллельную форму символы модуляции, выведенные из блока 1111 символьного преобразования, и выводит преобразованные в параллельную форму символы модуляции в блок 1115 вставки последовательности пилот-сигнала. Блок 1115 вставки последовательности пилот-сигнала осуществляет вставку последовательностей пилот-сигналов в преобразованные в параллельную форму символы модуляции, выведенные из последовательно-параллельного преобразователя 1113, а затем, выводит символы модуляции со вставленной последовательностью пилот-сигнала в блок 1117 ОБПФ.
Блок 1117 ОБПФ выполняет N-точечное ОБПФ над сигналами, выведенными из блока 1115 вставки последовательности пилот-сигнала, и выводит результирующие сигналы в параллельно-последовательный преобразователь 1119. Параллельно-последовательный преобразователь 1119 преобразует в последовательную форму сигналы, выведенные из блока 1117 ОБПФ, и выводит преобразованные в последовательную форму сигналы в блок 1121 вставки защитных интервалов. Блок 1121 вставки защитных интервалов принимает сигнал, выведенный из параллельно-последовательного преобразователя 1119, вставляет в него защитный интервал и выводит сигнал со вставленным защитным интервалом в цифроаналоговый преобразователь 1123. Защитный интервал вставлен, чтобы устранить взаимное влияние между предыдущим OFDM-символом, переданным в предыдущем такте OFDM-символа, и текущим OFDM-символом, который должен быть передан в текущем такте OFDM-символа, в системе связи OFDM. Для защитного интервала используется циклический префиксный метод или циклический постфиксный метод. При циклическом префиксном методе заранее заданное количество последних отсчетов OFDM-символа во временной области копируется и вставляется в действительный OFDM-символ. При циклическом постфиксном методе заранее заданное количество первых отсчетов OFDM-символа во временной области копируется и вставляется в действительный OFDM-символ.
Цифроаналоговый преобразователь 1123 преобразует в аналоговую форму сигнал, выведенный из блока 1121 вставки защитного интервала, и выводит преобразованный в аналоговую форму сигнал в РЧ-процессор 1125. РЧ-процессор 1125, включающий в себя фильтр и узел высокочастотного тракта, осуществляет РЧ-обработку сигнала, выведенного из цифроаналогового преобразователя 1123, с тем чтобы сигнал мог быть передан по эфиру фактически, и передает РЧ-обработанный сигнал по эфиру через передающую антенну.
Ниже описан приемник 1150 БС. Приемник 1150 состоит из РЧ-процессора 1151, аналогово-цифрового (A/Ц) преобразователя 1153, формирователя 1155 приемного луча, сигнального процессора 1157, блока 1159 удаления защитных интервалов, последовательно-параллельного (S/P) преобразователя 1161, блока 1163 быстрого преобразования Фурье (БПФ), компенсатора 1165, блока 1167 извлечения символов пилот-сигнала, узла синхронизациии и канальной оценки, параллельно-последовательного (P/S) преобразователя 1171 и блока 1173 обратного символьного преобразования.
Сигналы, переданные передатчиком 1100 МС, принимаются приемными антеннами приемника 1150 БС, принятый сигнал распространяется в канале многолучевого распространения и содержит шумовой компонент. Сигналы, принятые приемными антеннами, вводятся РЧ-процессор 1151, а РЧ-процессор 1151 осуществляет преобразование с понижением частоты сигналов, принятых приемными антеннами, в сигнал промежуточной частоты (ПЧ) и выводит ПЧ-сигнал в аналогово-цифровой преобразователь 1153. Аналогово-цифровой преобразователь 1153 преобразует в цифровую форму аналоговый сигнал, выведенный из РЧ-процессора 1151, и выводит преобразованный в цифровую форму сигнал в формирователь 1155 приемного луча и сигнальный процессор 1157. Операции формирователя 1155 приемного луча и сигнального процессора 1157 описаны выше со ссылкой на первый и второй варианты осуществления настоящего изобретения, поэтому их подробное описание опущено.
Сигнал, выведенный из формирователя 1155 приемного луча, вводится в блок 1159 удаления защитных интервалов. Блок 1159 удаления защитных интервалов удаляет защитный интервал из сигнала, выведенного из формирователя 1155 приемного луча, и выводит результирующий сигнал в последовательно-параллельный преобразователь 1161. Последовательно-параллельный преобразователь 1161 преобразует в параллельную форму последовательный сигнал, выведенный из блока 1159 удаления защитных интервалов, и выводит результирующий сигнал в блок 1163 БПФ. Блок 1163 БПФ выполняет N-точечное БПФ над сигналом, выведенным из последовательно-параллельного преобразователя 1161, и выводит результирующий сигнал в компенсатор 1165 и блок 1167 извлечения пилот-сигнала символов. Компенсатор 1165 выполняет канальную компенсацию над сигналом, выведенным из блока 1163 БПФ, и выводит результирующий сигнал в параллельно-последовательный преобразователь 1171. Параллельно-последовательный преобразователь 1171 преобразует в последовательную форму параллельный сигнал, выведенный из компенсатора 1165, и выводит результирующий сигнал в блок 1173 обратного символьного преобразования. Блок 1173 обратного символьного преобразования демодулирует сигнал, выведенный из параллельно-последовательного преобразователя 1171, используя схему демодуляции, соответствующую схеме модуляции, используемой в передатчике 1100 МС, и выводит результирующий сигнал в качестве принятых информационных бит данных.
Кроме того, сигнал, выведенный из блока 1163 БПФ, вводится в блок 1167 извлечения символов пилот-сигнала, которое извлекает символы пилот-сигнала из сигнала с блока 1163 БПФ, и выводит извлеченные символы пилот-сигнала в узел 1169 синхронизации и канальной оценки. Узел 1169 синхронизации и канальной оценки выполняет синхронизацию и канальную оценку над символами пилот-сигнала, выведенными из блока 1167 извлечения символов пилот-сигнала, и выводит результат в компенсатор 1165.
Как следует из вышеизложенного описания, система мобильной связи формирует вес, используя способ 2-этапного формирования весов, или CM-метод на этапе сходимости, и вырабатывает вес, используя DD-метод на этапе стабилизации, тем самым обеспечивая возможность быстрого формирования веса, с минимальным значением MSE. Следовательно, является возможным формировать корректный приемный луч, позволяющий приемнику осуществлять точный прием только полезного сигнала, тем самым улучшая производительность системы.
Хотя изобретение показано и описано со ссылкой на его предпочтительные варианты осуществления, специалистам в данной области техники должно быть понятно, что могут быть сделаны различные изменения по форме и в деталях без отклонения от сущности и объема изобретения, которые определены прилагаемой формулой изобретения.









Изобретение относится к технике связи. Система мобильной связи принимает сжатый сигнал для принятого сигнала и выполняет операцию управления так, что вес для формирования приемного луча вычисляется с использованием метода постоянного модуля, если разность между значением ошибки в текущее время и значением ошибки в предыдущее время является большей, чем абсолютное значение первого порогового значения, либо значение ошибки в текущее время является большим или равным второму пороговому значению. Выполняют операцию управления так, что вес вычисляется с использованием метода с управлением по решению, если разность между значением ошибки в текущее время и значением ошибки в предыдущее время является меньшей или равной абсолютному значению первого порогового значения, а значение ошибки в текущее время является меньшим, чем второе пороговое значение. Техническим результатом является создание устройства и способа приема данных с использованием метода двухэтапного формирования весов в системе мобильной связи, использующей схему адаптивной антенной решетки. 8 н. и 14 з.п. ф-лы, 11 ил.
| УСТРОЙСТВО ПРИЕМА ДИСКРЕТНЫХ СИГНАЛОВ В МНОГОЛУЧЕВОМ КАНАЛЕ СВЯЗИ | 1992 |
|
RU2048701C1 |
| МНОГОКАНАЛЬНОЕ АДАПТИВНОЕ РАДИОПРИЕМНОЕ УСТРОЙСТВО | 1994 |
|
RU2107394C1 |
| US 6353643 B1, 05.03.2002 | |||
| US 5598428 A, 28.01.1997 | |||
| US 6205166 A, 20.03.2001. | |||

