Изобретение относится к электротехнике, в частности к управлению электродвигателями, и может быть использовано для регулирования числа оборотов трехфазных асинхронных электродвигателей промышленных установок, также быть применено в тяговых электродвигателях железнодорожного транспорта, работающих на переменном токе и в асинхронных электродвигателях, включенных по схеме “мотор - колесо” в большегрузных машинах автомобильного транспорта, например тягачах.
Известны классические способы регулирования числа оборотов трехфазных двигателей, см. “Электротехника с основами промышленной электроники”, В.Б.Китаева и Л.С.Шляпинтоха, М, Высшая школа, 1964 г., стр.260-262, в которых для изменения скорости вращения достаточно изменить любую из трех величин (f1, ρ, s)
где: f1 - частота переменного тока, ρ - число пар полюсов двигателя, s -скольжение согласно формуле n2=60 f1/ρ (1-s), где n2 - число оборотов ротора.
При кажущейся внешней простоте выражения на практике это выливается в следующие недостатки:
- изменение частоты возможно при наличии специального генератора, а это неэкономично, этот способ применяется, когда несколько двигателей синхронно должны изменять скорость вращения;
- изменение числа полюсов двигателя, при этом способе на статоре размещают либо две обмотки с различным числом полюсов, либо одну, допускающую переключение на разное число полюсов, но это годится для двигателей только с короткозамкнутым ротором;
- изменение скольжением, для чего в цепь обмотки ротора вводят регулировочный реостат, но этот способ применим для двигателей с ротором, имеющим фазную обмотку, также этот способ неэкономичен и снижает КПД двигателя.
Известны способы регулирования частоты вращения асинхронных двигателей изменением величины или нарушением симметрии подводимого напряжения, см. “Электрические машины”, М.М.Кацман, М., “Высшая школа”, 1983 г., стр.190-192.
Недостатками этих способов являются:
- узкий диапазон регулирования и утрата перегрузочной способности (первый способ);
- узкая зона регулирования и уменьшение КПД двигателя (второй способ).
Известны способы управления частотой вращения, основанные на тиристорном управлении с применением ЭВМ (PC), см. “Цифровые системы управления электроприводами”, А.А.Батоврин и др., Энергия, Ленинград, 1977, стр.106-112, 123-128. Так известен асинхронно-вентильный каскад, см. А.С. СССР №1716596, в котором с целью расширения диапазона регулирования частоты вращения датчик частоты и фазы асинхронного двигателя выполнен электрическим и составлен из последовательно соединенных между собой индуктивного токового фильтра, входом соединенного с выводами обмотки ротора асинхронного двигателя, узла гальванической развязки, выделителя полуволн напряжения, формирователя прямоугольных импульсов и формирователя частоты и фазы напряжения ротора, выход которого образует выход датчика частоты и фазы асинхронного двигателя, и введены фазосмещающий блок, одним входом соединенный с выходом датчика частоты и фазы напряжения сети, а другим входом - с выходом задатчика интенсивности, выделитель выходных частот, включенный между входом задатчика интенсивности и выходом датчика частоты и фазы асинхронного двигателя, двухвходовой блок перемножения, один вход которого соединен с выходом фазосмещающего блока, другой вход - с выходом датчика частоты и фазы асинхронного двигателя, а выход блока перемножения подключен к входу блока управления тиристорным преобразователем частоты.
Недостатком этого каскада является его сложность и все равно недостаточный диапазон регулирования.
Также известно устройство по А.С. СССР “Способ управления асинхронным двигателем с фазным ротором”, при котором напряжение ротора после понижения в трехфазном трансформаторе преобразуют в находящееся в фазе с напряжением ротора электродвигателя напряжение пилообразной формы с длительностью, равной половине периода напряжения ротора, напряжение пилообразной формы сравнивают с опорным напряжением и по результату сравнения осуществляют воздействие на тиристорную силовую схему в цепи ротора электродвигателя, а с целью повышения точности и диапазона регулирования стабилизируют амплитуду тока ротора, амплитуду указанного напряжения пилообразной формы формируют пропорционально периоду напряжения ротора, в указанное опорное напряжение формируют путем умножения напряжения, пропорционального амплитуде напряжения пилообразной формы, на напряжение задания момента.
Недостатками данного способа является, при всей кажущейся привлекательности, следующие:
- большие пусковые токи, что требует специальных мер их уменьшения, а следовательно увеличения аппаратурных затрат;
- недостаточный диапазон регулирования в силу построения самой схемы;
- низкий КПД.
Отдельной проблемой регулирования скорости вращения электродвигателей переменного тока большой мощности является момент включения/ выключения, т.к. желательно это делать при переходе фаз через нуль, в противном случае возникают броски перенапряжений (точнее токов, со всеми вытекающими отсюда неприятными последствиями). Известно устройство для переключения силовых транзисторов в момент перехода напряжений через ноль, см. ж. “Вестник электроники”, №1, 2003 г, статья “Квазирезонансный режим работы”, в которой описан контур, определяющий момент, когда вся энергия уже передана и напряжение стока минимально, за счет этого снижаются потери на переключение, нагрев и т.д.
Недостатки следующие: схема достаточно громоздка и хорошо работает на высоких частотах, на низких частотах возникают проблемы со схемной реализацией.
Известен мотор-колесо, см. патент РФ №2038955. Сущность изобретения: в мотор-колесе, содержащем электропривод, состоящий из источника регулируемого напряжения и электродвигателя, якорь с магнитопроводом и электромагнитами закреплен на оси, индуктор с магнитопроводом и постоянными магнитами закреплен на ободе, распределительный коллектор, образованный расположенными по окружности пластинами закреплен на якоре, токосъемники щетками закреплены на индукторе, дополнительно введены минимум один индукторный токосъемник на индукторе, имеющий щетку, и минимум один кольцевой контакт, закрепленный на якоре. Пластины соединены с катушками электромагнитов. Указанное мотор-колесо имеет ряд модификаций и может использоваться для создания экологически чистых, надежных и экономических транспортных средств - ПРОТОТИП.
Недостатком прототипа является его сложность, а введение щеток, кольцевых контактов (умноженных на число колес) при повышенных мощностях, (60-100 кВт) приводит к резкому возрастанию уровня помех и износу щеток, контактов и т.д. Также следует отметить недостаточность глубины регулировки по скорости.
Технической задачей изобретения является повышение эксплутационных качеств за счет:
- исключения щеток, контактов и прочих механических искрозадающих элементов;
- увеличения глубины регулировки по скорости с одновременным сохранением перегрузочной способности;
- резкого увеличения КПД.
Указанная цель достигается тем, что предлагается устройство управления асинхронным электродвигателем, содержащее силовые ключи с драйвером управления, системный контроллер, конденсатор со схемой включения, тахогенератор, шина последовательного интерфейса, шина входных разовых команд, входная шина управления, восемь управляющих шин, силовые шины, шины обратных связей и управляемый вентилятор, соединенные следующим образом: системный контроллер первой управляющей шиной соединен с входом включения конденсатора, второй, третьей, четвертой и седьмой управляющими шинами - с входами драйвера, восьмой управляющей шиной - с управляющим входом вентилятора; входами системного контроллера являются входная шина управления и входы разовых команд, также шины обратных связей по току, по частоте вращения и температуре, а входом/выходом - шина последовательного интерфейса; пятая и шестая шины управления драйвера соединены с затворами силовых ключей 3-фазного моста, который шиной обратной связи по току соединен с системным контроллером и драйвером, а шиной обратной связи по температуре - с входом системного контроллера; в качестве силовых ключей применен 3-фазный мост на SkiM-инверторе, выходные силовые шины которого соединены с управляющими обмотками статора тягового электродвигателя, вал которого через редуктор соединен с осью ходового колеса, на которой находится тахогенератор, а выходная обмотка последнего соединена с шиной обратной связи по частоте вращения; силовое питание 3-фазного моста плюсовой шиной соединено со стоками верхних силовых ключей и через устройство включения - с первым конденсатором, а нулевой шиной через токовый резистор - со стоками нижних силовых ключей, общая точка которых соединена с шиной обратной связи по току, температурный датчик измерения нагрева SkiM-инвертора соединен с шиной обратной связи по температуре; входной каскад системного контроллера выполнен на первом и втором операционных усилителях выделения модуля, соединенных: первый с входной шиной управления, а второй - с шиной обратной связи по скорости с тахогенератора, выход этих усилителей соединен с инверсным и прямым входом компаратора соответственно, выход компаратора соединен седьмой управляющей шиной с входом отключения драйвера.
На фиг.1 и фиг.2 изображено:
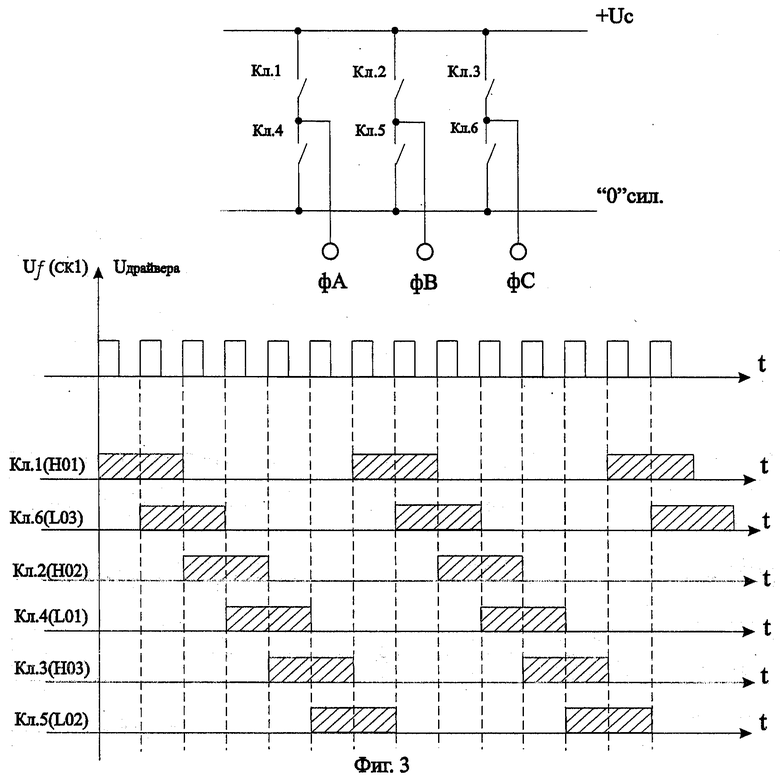
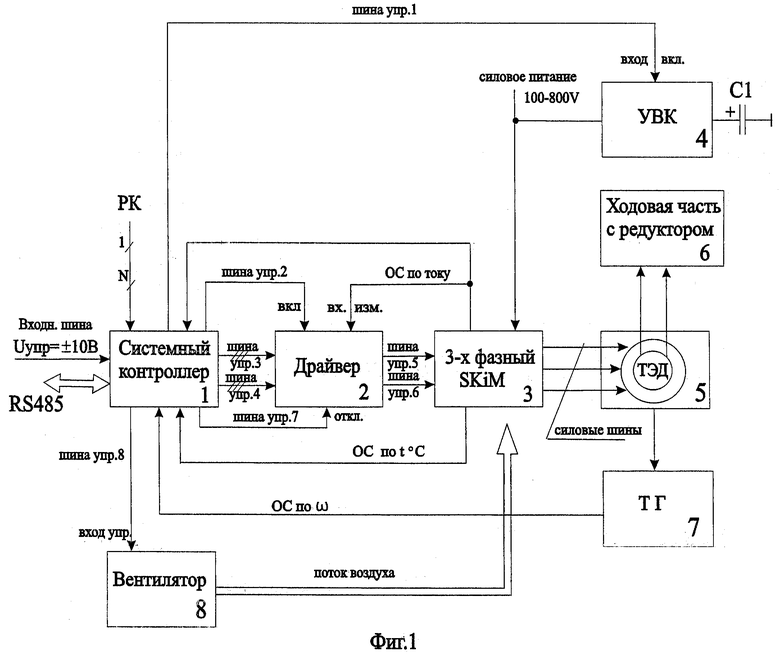
1 - системный контроллер (СК) (устройство для обмена данными с другой подсистемой, регулируя ее работу), 2 - драйвер (устройство, контролирующее и управляющее работой другого устройства), 3 - 3-фазный SkiM (это шесть силовых ключей, образующих 3-фазный мост для включения и выключения обмоток трехфазного асинхронного двигателя по программе СК1), 4 - устройство включения конденсатора (УВК), 5-3-фазный асинхронный тяговый электродвигатель (ТЭД), 6 - ходовая часть с редуктором (вместе с двигателем 5 образует систему “мотор-колесо”), 7 - тахогенератор (ТГ), 8 - управляемый вентилятор, Кл1-Кл3 - верхние силовые ключи, Кл4-Кл6 - нижние силовые ключи, Uупр - входная шина управления, восемь шин управления, 1-N - число разовых команд (РК), RS485 - шина последовательного интерфейса, шины обратных связей по току и по угловой скорости (ω), силовые шина, шина силового питания и шина измеренной температуры SkiM; на фиг.3 изображены временные диаграммы задающего генератора СК1 и на выходах драйвера 2 (на шинах управления 3-6), шины питания СК1, драйвера 2 и вентилятора 8 на фиг.1 условно не показаны.
Входами СКГ являются: входная шина U управления, шины 1-N PK, шины ОС по току и ω, шина RS485 является входом/выходом; выходами СК1 являются: выходная первая шина управления соединенная с входом включения УВК4, выходная вторая шина управления, соединенная с входом включения драйвера 2, выходная третья шина управления (3 разряда HIN1-HIN3), соединенная с входами управления верхними ключами драйвера 2, выходная четвертая шина управления (3 разряда LIN1-LIN3) соединена с входами управления нижними ключами драйвера 2, выходная седьмая шина управления соединена с входом отключения драйвера 2, выходная восьмая шина управления соединена с входом управления вентилятора 8, выходная пятая шина управления драйвера 2 (шесть разрядов HO1, VS1 - HO3, VS3) соединена с верхними ключами Кл1-Кл3 SkiM3, выходная шестая шина управления драйвера 2 (три разряда LO1-LO3) соединена с нижними ключами Кл4-Кл6 SkiM3, выходные силовые шины SkiM3 соединены с обмотками управления ТЭД (ОУ1-ОУЗ), фазы А, В и С соответственно), ротор которого соединен с редуктором ходовой части 6, также с ротором соединен ТГ7, выходом которого является шина ОС по частоте вращения, выход вентилятора 8 потоком воздуха связан с SkiM3, силовое питание: плюсовой шиной соединено со стоками верхних силовых ключей Кл1-Кл3, а минусовой (нулем) - с истоками нижних силовых ключей Кл4-Кл6.
Указанные узлы могут быть выполнены на следующих ИМС и электрорадиоэлементах: системный контроллер 1, например, на сигнальном процессоре ADMCF328, см. копию описания (прилагается к заявке); драйвер 2 на ИМС IR2130, см. копию описания (прилагается к заявке).
3-фазный SkiM на IGBT-модулях, конструктивно выполненных по SkiM-технологии, см. копию описания (прилагается к заявке); УВК4 - на любой плавной схеме включения, например на электронно управляемом сопротивлении; ТЭД5 - любой асинхронный двигатель с коротко-замкнутым ротором, мощностью до 60 кВт, ходовая часть с редуктором в зависимости от выбранного ходового шасси; ТГ7 - любой, в зависимости от скорости вращения ТЭД5; вентилятор 8 - любой (постоянного или переменного тока), выбирается из требуемого потока воздуха м3/мин для охлаждения SkiM; шина измеренной температуры от датчика температуры внутри SkiM3, например, фирмы DALLAS, типа DS 1820 см. TECHNISCER KATALOG Germany, стр.121; ОУ, ОУ2 и компаратор на ИМС серии 140 см. Справочник “Интегральные микросхемы”, РадиоСофт, М., 2001, стр.411. УВК 4 в общем случае регулируемый напряжением реостат, сопротивление которого обратно пропорционально подаваему напряжению первой по шине управления.
Устройство работает следующим образом. В основу положен классический принцип Uпит/fупр=Const, для чего одновременно меняются два параметра: напряжение силового питания и задающая на SkiM частота. Величина силового напряжения регулируется вне устройства и жестко связана с управляющим входным напряжением Uупр для выдерживания вышеприведенного соотношения. В исходном состоянии СК1 по третьей и четвертой шинам управления не выдает сигналов, следовательно и драйвер 2 и SkiM 3 также выключены и ТЭД 5 не вращается, хотя силовое питание=100 В. При приходе РК включается УВК 4 и плавно (≈ в течение 2-3 сек) конденсатор С1 заряжается, после чего по второй шине управления проходит сигнал на включение драйвера 2. Но также в это время на входной шине Uупр СК1 не вырабатывает никаких управляющих по частоте сигналов и драйвер 2 и SkiM 3 по прежнему “молчат”, а ТЭД 5 не вращается. С приходом какого-то сигнала по шине Uупр (плюсовое значение вращения двигателя по часовой стрелке, минусовое - наоборот) СК1 вырабатывает импульсное однополярное напряжение, частота которого прямо пропорциональна Uвх., а амплитуда импульсов приблизительно равна напряжению питания СК1 и драйвера 2 см. фиг.3 Uf (CK1). На выходных третьей и четвертой шинах управления CK1 вырабатываются импульсы, сдвинутые друг относительно друга на 120°С, которые после умощнения (по току) на драйвере 2 имеют вид, см.фиг.3 Uдрайвера. Эти импульсы поступают на верхние и нижние ключи Кл.1-Кл.6 согласно этой фиг.3, открывая и закрывая их в указанной на фиг.3 последовательности, при этом на фазах А, В и С обмоток ТЭД5 образуется переменное электрическое поле, частота которого определяется величиной входного управляющего напряжения на CK1, а амплитуда и ток в зависимости от напряжения силового питания. При этом приблизительно (с достаточной точностью) выполняется известное выражение для управления асинхронным электродвигателем U/f=Const. Т.о. ТЭД5 начинает вращаться с увеличивающейся частотой (угловой скорости ω), определяемой Uупр., при этом сигнал ОС по этой частоте вращения с ТГ7 также начинает увеличиваться и при какой-то частоте вращения (угловой скорости ω) сравняется, а затем и превысит Uупр. В результате напряжение /Uoc по ω/ на выходе ОУ1 превысит напряжение /Uупр/ на выходе ОУ2 и компаратор 1 изменит свое состояние по выходу с лог.0 на лог. 1 и по седьмой управляющей шине пройдет сигнал на отключение драйвера 2. Данная схема может быть выполнена россыпью, как и весь СК1, но может быть выполнен и на микроконтроллере. Силовые ключи 1-6 будут в закрытом состоянии, ТЭД5 вращается по инерции до тех пор, пока его угловатая скорость не уменьшится до величины, при которой сигнал ОС по частоте вращения (угловой скорости ω) с ТГ7 не станет меньше Uупр., тогда компаратор 1 вернется в исходное состояние, и драйвер 2 снова включится, и снова ключи 1-6 будут переключаться согласно диаграммам фиг.3. Такое управление позволяет значительно увеличить КПД ТЭД5, а следовательно, и всей силовой установки.
Для надежности работы устройства применено плавное включение силового конденсатора С1 по первой шине управления, иначе при его релейном включении можно выбить силовую шину (генератор) и может сам конденсатор выйти из строя, т.к. его величина лежит в пределах 10.000 мкF и в момент включения будет просто К3. Принципиальная схема плавного включения силового конденсатора С1 не раскрыта, т.к. она общеизвестна и не представляет особого интереса. 3-фазный SkiM 3 имеет защиту ОС по току (см. фиг.2 резистор R7), которая контролируется (измеряется) СК1 и драйвером 2, отключая их, т.о. переводя ключи Кл1-Кл.6 в закрытое состояние, не допуская их выхода из строя. Также в SkiM 3 имеется датчик температуры нагрева силовых ключей КлЛ-Кл.6, который передает информацию о температуре по шине ОС по t°C на СК1, который в зависимости от величины нагрева силовых ключей назначает число оборотов вентилятора 8, тем самым регулируя поток воздуха м3/мин, который охлаждает SkiM3.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2635663C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ МАШИНЫ С ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ | 2017 |
|
RU2648652C1 |
| СИСТЕМА ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКОТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2465152C2 |
| САМОХОДНАЯ МАШИНА С ЭЛЕКТРИЧЕСКОЙ СИСТЕМОЙ ПРИВОДА | 2019 |
|
RU2715820C1 |
| СПОСОБ ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКО-ТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2462603C2 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА СО ВСТРОЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2017 |
|
RU2656866C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ПЕРЕКЛЮЧАЕМЫМИ ФАЗНЫМИ ОБМОТКАМИ | 2018 |
|
RU2698464C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ С ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ | 2018 |
|
RU2688563C1 |
| СТАНЦИЯ УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2012 |
|
RU2507418C1 |

Изобретение относится к электротехнике и может быть использовано для регулирования числа оборотов трехфазных асинхронных двигателей промышленных установок, а также в тяговых электродвигателях железнодорожного транспорта, работающих на переменном токе и в асинхронных электродвигателях, включенных по схеме "мотор - колесо" в большегрузных машинах автомобильного транспорта, например тягачах. Техническим результатом является повышение эксплутационных качеств. В устройстве управления асинхронным электродвигателем системный контроллер первой управляющей шиной соединен с входом включения конденсатора, второй, третьей, четвертой и седьмой управляющими шинами - с входами драйвера, восьмой управляющей шиной - с управляющим входом вентилятора. Входами системного контроллера являются входная шина управления и входы разовых команд, шины обратных связей по току, по частоте вращения и температуре, а входом/выходом - шина последовательного интерфейса. Пятая и шестая шины управления драйвера соединены с затворами силовых ключей 3-фазного моста, который шиной обратной связи по току соединен с системным контроллером и драйвером, а шиной обратной связи по температуре - с входом системного контроллера. 2 з.п. ф-лы, 3 ил.
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2069034C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ТЯГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1995 |
|
RU2123757C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1998 |
|
RU2136103C1 |
| ДВЕРНОЙ ЗАМОК С ДВУМЯ КЛЮЧАМИ | 1926 |
|
SU7260A1 |
| Приспособление для выработки соломенных матов на машине для изготовления кардной ленты | 1929 |
|
SU22843A1 |
| Способ управления преобразователем | 1989 |
|
SU1767668A1 |
| Способ исправления дефектов сварного шва | 1987 |
|
SU1540997A1 |
| US 4437051 А, 13.03.1984 | |||
| СОЛИ (1R*,2R*,4R*)-2-(2-{[3(4,7-ДИМЕТОКСИ-1Н-БЕНЗОИМИДАЗОЛ-2-ИЛ)ПРОПИЛ]МЕТИЛАМИНО}ЭТИЛ)-5-ФЕНИЛБИЦИКЛО[2.2.2]ОКТ-5-ЕН-2-ИЛОВОЙ ИЗОМАСЛЯНОЙ КИСЛОТЫ | 2009 |
|
RU2516247C2 |
| Способ получения органических адсорбентов | 1937 |
|
SU53916A1 |
| Шланговое соединение | 0 |
|
SU88A1 |

