Изобретение относится к электротехнике и может быть использовано в частотнорегулируемом электроприводе.
Известно устройство (см. авт. св-во СССР N 1767668, опубликованное 07.10.92. в Б. N 37, имеющее приоритет от 22.12.89, по заявке N 4800295/07), содержащее асинхронную машину, подключенную к автономному инвертору напряжения, к входу которого подключен тормозной регулятор и выход фильтра (звена постоянного тока), вход которого предназначен для подключения к источнику питания, систему управления и блок выходных каскадов, через которые система управления подключена к тиристорам инвертора.
Это устройство позволяет осуществлять эффективный и экономичный способ реализации генераторного режима асинхронной машины при 60-ти градусном режиме управления инвертором напряжения.
Однако это возможно в данном варианте лишь при неизменной частоте питания обмотки статора. При изменении частоты питания это устройство не работает, так как для этого требуется стабилизировать возникающие переходные процессы, связанные с изменением частоты питания.
Техническая задача состоит в стабилизации момента на валу двигателя, что обеспечивает работу привода при изменяющейся частоте питания двигателя.
Работа асинхронного частотнорегулируемого привода с инвертором напряжения в автономном генераторном режиме имеет ряд особенностей. Асинхронная машина, являясь в этом случае асинхронным генератором, может работать как при отсутствии нагрузки со стороны звена постоянного тока, так и при включении на резистор или на сеть.
При работе на сеть асинхронная машина работает в режиме генератора электрической энергии, отдаваемой в сеть. В этом случае имеет место особенность создания магнитного потока. При 60-ти градусном управлении инвертором становится невозможным обмен энергией между сетью и машиной, так как мы имеем режим работы привода с "оборванной фазой". В этом случае асинхронная машина может отдавать энергию через обратный мост в звено постоянного тока, но получить энергию из сети (звена постоянного тока) не может. Это определяет специфику работы привода в генераторном режиме. Возможен только режим самовозбуждения. Поэтому создание и поддержание магнитного потока машины определяют два фактора. Первый - это наличие потока ротора. Второй фактор состоит в том, что автономный инвертор напряжения за период создает шесть различных двухфазных короткозамкнутых контуров обмотки статора.
Длительность двухфазного короткого замыкания составляет одну шестую часть периода, то есть через π/3 инвертором изменяются фазы, составляющие короткозамкнутый контур.
Поток ротора, создаваемый током в роторе, усиливается и поддерживается током короткозамкнутых контуров обмотки статора. Вращающийся ротор и переключающая функция инвертора создает вращающийся магнитный поток. При этом величина тока в роторе зависит от величины потока и абсолютного скольжения, так как от величины потока и абсолютного скольжения зависит ЭДС в проводниках ротора:
E2 - KW2Kоб.(f1-f2)Ф
(см. книгу М. П.Костенко и Л.М.Пиотровского "Электрические машины", ч. II, Госэнергоиздат, М.-Л., 1958, с. 411),
где
f1 - частота тока в статоре (частота переключения тиристоров инвертора);
f2 - частота вращения ротора;
(f1 - f2) - абсолютное скольжение;
Ф - магнитный поток;
K, Kоб. - коэффициенты;
W2 - число витков обмотки ротора.
При увеличении абсолютного скольжения (f1-f2) увеличивается ЭДС E2 в проводниках ротора, а при уменьшении абсолютного скольжения (f1-f2) - ЭДС E2 соответственно уменьшается. При изменении ЭДС E2 должна измениться величина ЭДС короткозамкнутого контура обмотки статора E1, трансформаторно связанная с ЭДС E2 ротора. Изменение ЭДС E1 при неизменной частоте f1 питания обмотки статора должно привести к изменению потока Ф. Таким образом, при постоянной частоте питания f1 поток машины зависит от абсолютного скольжения (f1-f2) машины, работающей в режиме самовозбуждения. При абсолютном скольжении, равном нулю, поток равен нулю, а при увеличении абсолютного скольжения увеличивается и поток.
При переменной частоте питания величина потока асинхронной машины также будет зависеть от величины абсолютного скольжения. При уменьшении частоты f1 увеличивается относительное скольжение S = f1-f2/f1 при постоянном абсолютном скольжении. В результате ЭДС E2 в роторе увеличивается, а следовательно, увеличивается ток и в роторе и, как следствие, магнитный поток и вращающий момент асинхронной машины.
Сказанное иллюстрируется кривыми на фиг. 1, где приведены зависимости момента вращения M от частоты вращения ротора M = f(ω2), где ω2 - сигнал, пропорциональный частоте вращения ротора.
На фиг. 1 видно, что при увеличении фиксированного значения абсолютного скольжения соответственно увеличиваются текущие и максимальное значения момента в функции частоты вращения ротора,
где
ωs = ω2-ω1 - сигнал, пропорциональный абсолютному скольжению в генераторном режиме асинхронной машины,
ω2 - сигнал, пропорциональный частоте вращения ротора.
ω1 - сигнал, пропорциональный частоте питания статора.
Таким образом, при ωs3 > ωs2 > ωs1 соответственно M3 > M2 > M1.
Следует сказать, что экстремум кривой момента M = f(ω2) расположен в зоне весьма низких частот вращения (единицы Герц). Максимальная же частота вращения выбирается исходя из требований на конкретный тип электропривода.
Итак, чтобы стабилизировать момент на валу электродвигателя, необходимо изменять по определенному закону значение заданного абсолютного скольжения по крайней мере в функции частоты вращения двигателя.
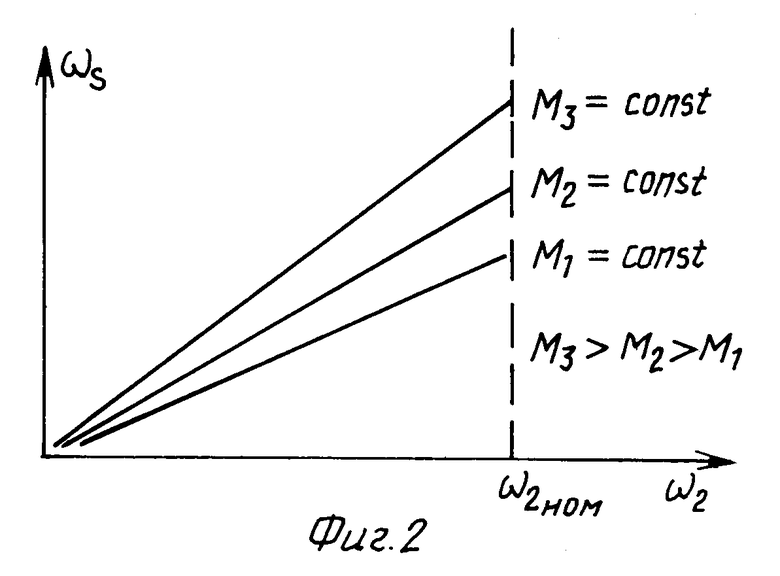
Из кривых на фиг. 1 могут быть получены зависимости ωs = f(ω2) , М = const то есть зависимости абсолютного скольжения от частоты вращения двигателя при фиксированных значениях вращающего момента.
На фиг. 2 представлены такие зависимости, откуда видно, что при M = const абсолютное скольжение ωs пропорционально текущему значению частоты вращения ω2, то есть ωs = Kω2, причем при изменении значения стабилизированного момента M изменяется и наклон характеристики посредством воздействия на коэффициент K.
Поставленную техническую задачу стабилизации момента на валу асинхронной машины, работающей в генераторном режиме, авторы решают с помощью устройства управления асинхронным тяговым электродвигателем, подключенным к автономному инвертору напряжения, к входу которого подключен тормозной регулятор и выход фильтра звена постоянного тока, вход которого предназначен для подключения к источнику питания. Устройство содержит блок системы управления, подключенный к тиристорам инвертора через блок выходных каскадов.
Дополнительно устройство содержит датчик скорости, установленный на валу электродвигателя, два масштабных усилителя, умножитель и сумматор, выходом подключенный к блоку системы управления. Первый вход сумматора подключен к выходу датчика скорости, а второй его вход подключен к выходу умножителя. К первому входу последнего подключен выход одного масштабного усилителя, а ко второму его входу подключен выход другого масштабного усилителя. Вход первого масштабного усилителя подключен к задатчику момента, а вход другого масштабного усилителя подключен к выходу датчика скорости.
Новым в предлагаемом техническом решении является то, что в устройство дополнительно введены датчик скорости, масштабные усилители, умножитель и сумматор, а также задатчик момента с их связями между собой и узлами схемы электропривода.
Это позволяет обеспечить стабилизацию вращающего момента асинхронного двигателя в генераторном режиме путем изменения абсолютного скольжения двигателя пропорционально частоте вращения вала ротора двигателя.
Сказанное позволяет сделать вывод о причинно-следственной связи между совокупностью существенных признаков и достигаемым техническим результатом.
На фиг. 1 приведены кривые зависимости момента асинхронного двигателя от частоты вращения его при фиксированных значениях абсолютного скольжения.
На фиг. 2 приведены зависимости абсолютного скольжения в функции частоты вращения двигателя при стабилизированных значениях момента на валу асинхронной машины.
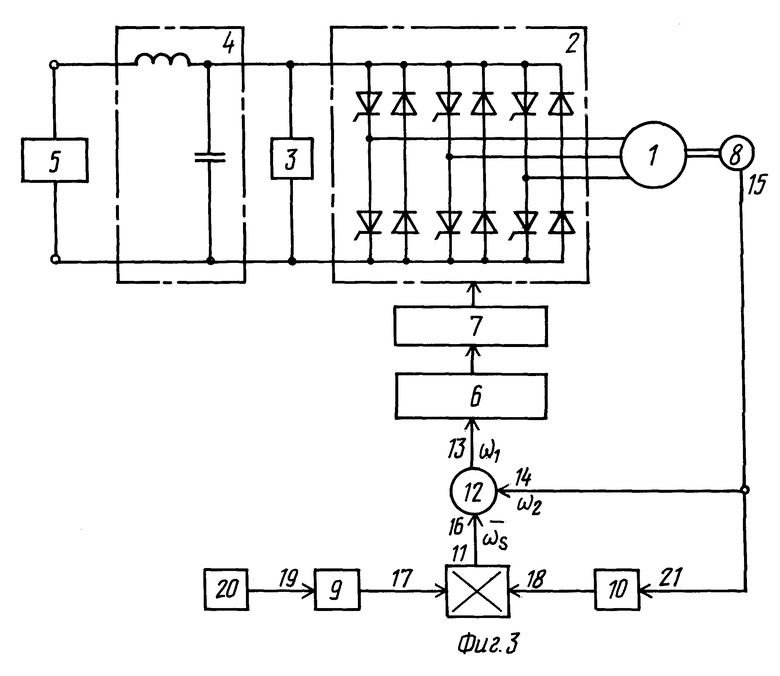
На фиг. 3 приведена схема предлагаемого устройства.
Проследим работу указанного устройства на конкретном примере.
Устройство управления асинхронным тяговым электродвигателем 1 (фиг. 3), подключенным к автономному инвертору 2 напряжения, к входу которого подключен тормозной регулятор 3 и выход фильтра 4 звена постоянного тока, вход которого предназначен для подключения к источнику 5 питания, содержит блок 6 системы управления, подключенный к тиристорам инвертора 2 через блок 7 выходных каскадов.
Дополнительно указанное устройство содержит датчик 8 скорости, установленный на валу электродвигателя 1, два масштабных усилителя 9, 10, умножитель 11 и сумматор 12, выходом 13 подключенный к блоку 6 системы управления. Первый вход 14 сумматора 12 подключен к выходу 15 датчика 8 скорости. Второй его вход 16 подключен к одноименному выходу 16 умножителя 11. К первому входу 17 умножителя 11 подключен одноименный выход первого масштабного усилителя 9. Ко второму входу 18 умножителя 11 подключен одноименный выход другого масштабного усилителя 10. Вход 19 первого из усилителей (9) подключен к задатчику 20 момента, а вход 21 масштабного усилителя 10 подключен к выходу 15 датчика 8 скорости.
Схема датчика 8 скорости описана в Техническом проекте ИДБН 566434001 "Вагон метрополитена с тяговым асинхронным приводом для обычных линий (комплект электрооборудования) 1983 г.
Схема сумматора 12 описана там же.
Схема 7 выходных каскадов описана там же.
Схема усилителей сигналов 9 и 10 может быть выполнена на базе стандартных ИОУ (например, типа 140 УД6) - см. Аналоговые и цифровые интегральные схемы. Справочное пособие под редакцией С.В.Якубовского, М., Р.и С., 1984, с. 280.
Схема умножителя 11 приведена в кн. авторов Б. Г.Федоркочев и др. "Микроэлектронные ЦАП и АЦП.", М., Р.и С., 1984, с. 45.
В качестве задатчика момента 20 может быть использован задатчик из кн. авторов А.В.Башарин и др. "Управление электроприводами." Учебное пособие для ВУЗов. - М, Электроатомиздат, 1981.
Блок системы управления 6 выполнен на базе микропроцессорного контроллера К1-20 (МС2702) - см. "Разработка и исследования по созданию линейного привода на базе асинхронного двигателя для транспортной системы Ереван - Абовян" - Н.-и. отчет ЛИИЖТ N г.р. 01869957518, 1990.
Работу предлагаемого устройства опишем следующим образом.
Для конкретного типа тягового асинхронного двигателя в задатчике 20 момента фиксируется заданное значение момента Mz. При этом величина абсолютного скольжения двигателя 1 по фиг. 2 может быть аналитически представлена следующим образом:
ωs = K1•Mz•K2•ω2,
где
Mz - заданный момент;
K1, K2 - коэффициенты, зависящие от типа двигателя;
ω2 - сигнал, пропорциональный частоте вращения двигателя;
ωs - сигнал, пропорциональный абсолютному скольжению двигателя, причем ωs = ω2-ω1 (для генераторного режима работы двигателя);
ω1 - сигнал, пропорциональный частоте питания обмотки статора двигателя 1.
Для заданного типа двигателя при номинальной частоте вращения его ротора ω2ном по кривым фиг. 2 может быть определена величина фиксированного значения момента M1 = const, M2 = const, M3=const и т.д., а также Мкр. - соответствующее критическому абсолютному скольжению ωsкр которые определяются при ω2 = ω2ном.
Таким образом, исходя из предельных соотношений указанных величин в номинальной точке, имеем:
ωsкр = K1•Mкр•K2•ω2ном,
откуда
Выбирая из удобства масштабирования значение коэффициента K1 (или K2), можно определить недостающий коэффициент.
Таким образом, работа предлагаемого устройства сводится к следующему.
При вращении двигателя 1 с выхода 15 датчика 8 скорости на вход 14 сумматора 12 поступает сигнал, пропорциональный текущему значению частоты вращения ω2 двигателя 1. Одновременно этот же сигнал ω2 поступает на вход 21 усилителя 10, где перемножается с коэффициентом K2, равным
и далее этот результат перемножения поступает на вход 18 умножителя 11.
Аналогичным образом на вход 17 умножителя 11 по каналам 20, 19, 9 поступает сигнал, пропорциональный произведению заданных величин, а именно: K1•Mz. В результате на вход 16 сумматора 12 с выхода 16 умножителя 11 поступает сигнал, пропорциональный текущему значению абсолютного скольжения ωs = K1•Mz•K2•ω2.
Так как в генераторном режиме работы асинхронной машины сигнал, пропорциональный частоте питания обмотки статора, равен:
ω1 = ω2-ωs
то в сумматоре 12 происходит алгебраическое сложение указанных сигналов ω2 и -ωs, а на вход 13 блока системы управления 6 поступает сигнал ω1, пропорциональный частоте переключения тиристоров инвертора 2.
Таким образом, предлагаемое техническое решение, реализуя 60-ти градусное управления частотнорегулируемым асинхронным электроприводом, обеспечивает стабилизацию момента вращения двигателя в генераторном режиме работы асинхронной машины при изменяющейся частоте питания обмотки статора машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ С ШИМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2091979C1 |
| СПОСОБ ОПТИМАЛЬНОГО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402865C1 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ ПОДВИЖНОГО СОСТАВА С ПИТАЕМЫМИ ОТ ИСТОЧНИКА ЧЕРЕЗ ПОЛУПРОВОДНИКОВУЮ ПРЕОБРАЗОВАТЕЛЬНУЮ УСТАНОВКУ ТРЕМЯ И БОЛЕЕ АСИНХРОННЫМИ ДВИГАТЕЛЯМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2092337C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ПРИВОДА С АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2284645C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
| Электропривод | 1987 |
|
SU1436263A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЯ ДВОЙНОГО ПИТАНИЯ | 2008 |
|
RU2393623C1 |
Изобретение позволяет стабилизировать момент асинхронного тягового двигателя, работающего в генераторном режиме при 60-ти градусном управлении инвертором напряжения, к которому подключен двигатель. Это достигается тем, что в устройство, содержащее асинхронный двигатель, автономный инвертор напряжения, звено постоянного тока и систему управления, дополнительно введены два усилителя сигналов, один умножитель, задатчик момента, сумматор, подключенный к системе управления, и датчик скорости, установленный на валу двигателя, а выходом подключенный к сумматору и к усилителю. Это позволяет поддерживать заданное значение момента на валу двигателя при изменяющейся частоте питания двигателя. 3 ил.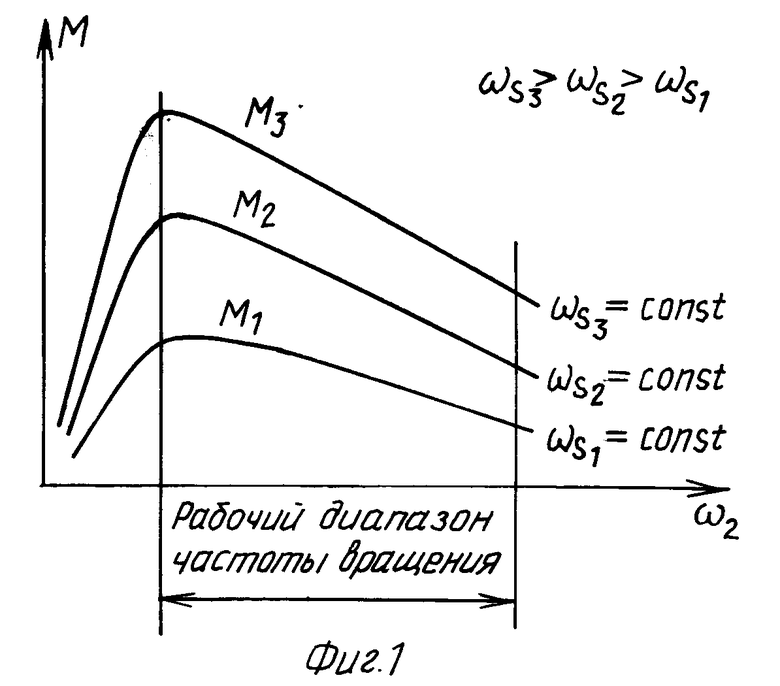
Устройство управления асинхронным тяговым электродвигателем, подключенным к автономному инвертору напряжения, к входу которого подключен тормозной регулятор и выход фильтра звена постоянного тока, вход которого предназначен для подключения к источнику питания, содержащее блок системы управления, подключенный к тиристорам инвертора через блок выходных каскадов, отличающееся тем, что оно дополнительно содержит датчик скорости, установленный на валу электродвигателя, два масштабных усилителя, умножитель и сумматор, выходом подключенный к блоку системы управления, первый вход сумматора подключен к выходу датчика скорости, а второй его вход подключен к выходу умножителя, к первому входу которого подключен выход одного масштабного усилителя, а ко второму входу умножителя подключен выход другого масштабного усилителя, вход первого из них подключен к задатчику момента, а вход другого масштабного усилителя подключен к выходу датчика скорости, при этом коэффициенты масштабных усилителей выбираются из соотношения
K1K2= ωsкр/Mкрω2ном,
где K1K2 - коэффициенты, зависящие от типа двигателя;
ωsкр - критическое абсолютное скольжение;
Mкр - величина критического электромагнитного момента;
ω2ном - номинальная частота вращения ротора.
| SU, 1767668 A, 07.10.92 | |||
| Способ управления асинхронным электроприводом и устройство для его осуществления (его варианты) | 1982 |
|
SU1164851A1 |
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1981 |
|
SU1443110A1 |
| Устройство для управления асинхронным электроприводом | 1979 |
|
SU788325A1 |
| Супергетеродинный приемник | 1936 |
|
SU51478A1 |
