Изобретение относится к системам автоматического регулирования авиационных газотурбинных двигателей (ГТД), в частности к способам управления подачей топлива в форсажную камеру ГТД.
Известен способ управления подачей топлива в форсажную камеру газотурбинного двигателя, включающий формирование сигнала подключения форсажного коллектора, предварительное заполнение форсажного коллектора и перевод форсажного дозатора в положение, пропорциональное положению рычага управления двигателем (см. "Теория автоматического управления силовыми установками летательных аппаратов. Управление ВРД", под ред. А.А.Шевякова, М., "Машиностроение", 1976 г., с.115, рис.4. 12).
Недостаток данного способа заключается в том, что предварительное заполнение форсажного коллектора в обеспечении минимизации времени включения коллектора производится гидропневматически, что не обеспечивает надежное безударное и за минимальное время подключение коллектора во всей области полета.
Технический результат - повышение динамических характеристик двигателя путем снижения времени форсажной приемистости.
Указанный технический результат достигается тем, что в способе управления подачей топлива в форсажную камеру газотурбинного двигателя, включающем предварительное заполнение форсажного коллектора топливом по сигналу включения форсажного коллектора и перевод форсажного дозатора в заданное положение, согласно изобретению, дополнительно устанавливают соответствие между текущим положением форсажного дозатора и расходом форсажного топлива, а предварительное заполнение форсажного коллектора производят путем перемещения дозатора с заданной скоростью в сторону увеличения расхода топлива в течение времени, определяемого предварительно заданными значениями требуемого объема форсажного коллектора, заданной скорости перемещения дозатора и минимального расхода форсажного топлива, от момента поступления сигнала включения форсажного коллектора, по истечении которого переводят форсажный дозатор с заданной скоростью в положение, соответствующее минимальному расходу форсажного топлива, после чего переводят форсажный дозатор в заданное положение.
Возможно, при поступлении сигнала выключения форсажного коллектора, измерять время от момента его поступления, по которому определяют текущее значение объема опорожнения форсажного коллектора, величину которого используют для корректировки заданного значения требуемого объема для заполнения форсажного коллектора, что позволяет исключить розжиг коллектора на высоких перепадах давления на форсунках при выполнении встречной приемистости, когда рычаг управления двигателем (РУД) переводят, например, в зону бесфорсажных режимов, после чего возвращают РУД в зону форсажей.
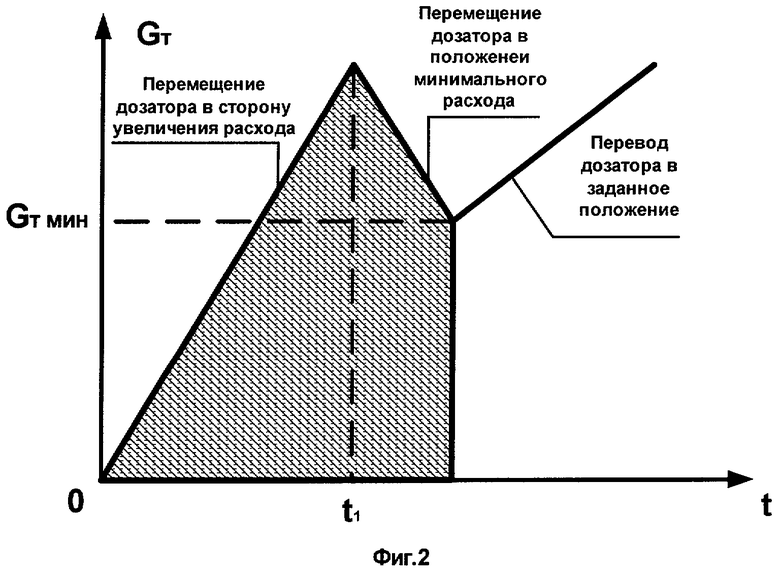
На фиг.1 представлена структурная схема системы регулирования форсажного контура;
на фиг.2 - график изменения расхода топлива в процессе заполнения форсажного коллектора.
Система регулирования содержит форсажный насос 1, форсажный регулятор 2, коллектор 3 форсажной камеры и электронный регулятор 4, связанный с датчиками внутри двигательных и режимных параметров двигателя: датчиком 5 температуры воздуха (T* 1) на входе в двигатель, датчиком 6 давления (Р2) воздуха за компрессором, датчиком 7 положения рычага управления двигателем (αруд). Форсажный регулятор 2 содержит дозатор 8, положение которого измеряет датчик 9 положения, и исполнительный механизм 10 управления дозатором 8. Датчик 9 положения подключен к входу регулятора 4, который по сигналу датчика 9 вычисляет величину расхода топлива. Управляющий выход регулятора 4 подключен к исполнительному механизму 10.
Способ проиллюстрирован графиком, представленным на фиг.2. Заштрихованная площадь на графике изменения расхода топлива (Gт) по времени (t) пропорциональна объему топлива, который проходит через дозатор 8 в процессе заполнения коллектора 3. Данный объем должен быть равен объему (QЗАПОЛН) заполняемого коллектора 3, который определяется на этапе его изготовления. Минимальный расход топлива, на который должен быть выведен дозатор в конце процесса заполнения коллектора - GМИН, определяется на этапе доводки форсажной камеры, исходя из условия обеспечения устойчивого горения топлива при минимально возможном перепаде на форсунках. Заданная (максимальная контролируемая) скорость перемещения дозатора определяется только конструкцией форсажного регулятора. Таким образом, задавая указанные выше параметры, из решения геометрической задачи фиг.2 можно определить время (t1) перемещения дозатора 5 в сторону увеличения расхода топлива:

где  - абсолютная величина заданной скорости изменения расхода топлива, а следовательно, перемещения дозатора 8.
- абсолютная величина заданной скорости изменения расхода топлива, а следовательно, перемещения дозатора 8.
Способ реализуется следующим образом.
Из форсажного насоса 1 топливо поступает в форсажный регулятор 2. Электронный регулятор 4 по сигналам датчиков 5, 6, 7 внутридвигательных и режимных параметров формирует заданное (расчетное) положение дозатора 8, т.е. такое положение дозатора, при котором обеспечивается потребный расход форсажного топлива. В рассматриваемом случае GT=f(αРУД,P2,T* 1). При переводе рычага управления двигателем (РУД) в положение, соответствующее включению данного форсажного коллектора 3, формируется сигнал включения коллектора для предварительного заполнения форсажного коллектора топливом. Процедура предварительного заполнения форсажного коллектора 3 топливом осуществляется следующим образом. Электронный регулятор 4, получая сигнал от датчика положения 9, формирует управляющий сигнал на исполнительный механизм 10, обеспечивая в течение времени t1, определенного по формуле 1, перемещение форсажного дозатора 8 с заданной скоростью в сторону увеличения расхода. По истечении времени t1 регулятор 4 меняет управляющий сигнал на обратный и обеспечивается перевод дозатора 8 с заданной скоростью в положение, соответствующее минимальному расходу. На этом процедура предварительного заполнения коллектора 3 заканчивается. После этого электронный регулятор 4 формирует управляющий сигнал на исполнительный механизм 10, осуществляется перевод дозатора 8 со скоростью, соответствующей форсажной приемистости, в заданное (расчетное) положение.
При поступлении сигнала выключения форсажного коллектора 3 (формировании сигнала перехода дозатора 8 в закрытое положение) электронный регулятор 4 отсчитывает (измеряет) время от момента поступления (прохождения) указанного сигнала. Поскольку опорожнение форсажного коллектора 3 происходит во времени, текущее значение объема опорожнения форсажного коллектора 3 определяют пропорционально указанному времени. Величину текущего значения объема опорожнения форсажного коллектора 3 используют для корректировки заданного значения требуемого объема для заполнения форсажного коллектора, а именно при повторном подключении коллектора 3, объем коллектора 3 корректируется в меньшую сторону вычитанием объема опорожнения на данный момент времени. Очевидно, что зависимость объема опорожнения от времени с момента закрытия дозатора определяется на этапе доводки форсажной камеры.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА В ФОРСАЖНУЮ КАМЕРУ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2315883C1 |
| СПОСОБ УПРАВЛЕНИЯ РАСХОДОМ ТОПЛИВА В ФОРСАЖНУЮ КАМЕРУ СГОРАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2438031C2 |
| СПОСОБ ЗАПОЛНЕНИЯ ТОПЛИВНЫХ КОЛЛЕКТОРОВ КАМЕР СГОРАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2555427C1 |
| Способ управления газотурбинным двигателем с форсажной камерой сгорания | 2022 |
|
RU2786967C1 |
| Способ управления газотурбинным двигателем с форсажной камерой сгорания | 2019 |
|
RU2720059C1 |
| Способ управления газотурбинным двигателем с форсажной камерой сгорания | 2022 |
|
RU2786965C1 |
| СПОСОБ ЗАПОЛНЕНИЯ ТОПЛИВНЫХ КОЛЛЕКТОРОВ КАМЕР СГОРАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2568015C1 |
| Способ управления газотурбинным двигателем с форсажной камерой сгорания | 2022 |
|
RU2781460C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ | 2014 |
|
RU2555784C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ | 2018 |
|
RU2706518C1 |
Изобретение относится к системам автоматического регулирования авиационных газотурбинных двигателей ГТД, в частности к способам управления подачей топлива в форсажную камеру ГТД. В способе управления подачей топлива в форсажную камеру газотурбинного двигателя, включающем предварительное заполнение форсажного коллектора топливом по сигналу включения форсажного коллектора и перевод форсажного дозатора в заданное положение, дополнительно устанавливают соответствие между текущим положением форсажного дозатора и расходом форсажного топлива, а предварительное заполнение форсажного коллектора производят путем перемещения дозатора с заданной скоростью в сторону увеличения расхода топлива в течение времени, определяемого предварительно заданными значениями требуемого объема форсажного коллектора, заданной скорости перемещения дозатора и минимального расхода форсажного топлива, от момента поступления сигнала включения форсажного коллектора, по истечении которого переводят форсажный дозатор с заданной скоростью в положение, соответствующее минимальному расходу форсажного топлива, после чего переводят форсажный дозатор в заданное положение. Изобретение позволяет повысить динамические характеристики двигателя путем снижения времени форсажной приемистости. 1 з.п. ф-лы, 2 ил.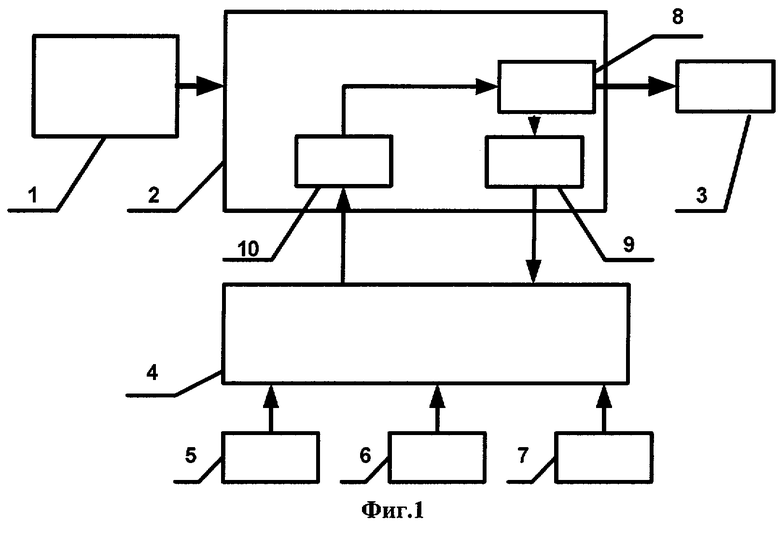
| Теория автоматического управления силовыми установками летательных аппаратов, Управление ВРД./Под.ред | |||
| А.А | |||
| ШЕВЯКОВА | |||
| - М.: Машиностроение, 1976, с.115, рис.4.12.RU 2063532 C1, 10.07.1996.RU 2027887 C1, 27.01.1995.RU 2188333 C1, 27.08.2002.SU 1760799 A, 30.01.1994.US 4719750 A, 19.01.1988.JP 2298634 A, 11.12.1990. |

