Управляемый привод рабочего колеса осевого вентилятора широко применяют в технике, в том числе и на подвижном составе, в частности в автоматических системах регулирования температуры теплоносителей двигателей внутреннего сгорания [1]. Управляемый привод рабочего колеса осевого вентилятора может применяться также в системах воздушного охлаждения тяговых электрических машин и преобразователей подвижного состава [2]. Известно, что для плавного изменения скорости вращения рабочего колеса вентилятора применяются различные виды приводов: гидравлический, электромеханический с индукторной муфтой скольжения, электрический с двигателем постоянного тока, электрический с асинхронным двигателем и преобразователем частоты, электрический с асинхронным двигателем и регулятором напряжения и что КПД их различны [3]. Известен осевой вентилятор с поворотными лопатками рабочего колеса как исполнительно-регулирующее устройство для автоматических систем регулирования температуры, имеющий механический привод рабочего колеса от вала дизель-генераторной установки [4] или электрический привод рабочего колеса с питанием его от тягового генератора [5], при этом подача вентилятора определяется величиной скорости вращения nв вала рабочего колеса вентилятора, пропорциональной скорости вращения вала дизель-генераторной установки nдг, и величиной угла αв наклона лопаток рабочего колеса, и может автоматически изменяться в широких пределах путем изменения αв.
Известно исполнительно-регулирующее устройство для автоматических систем регулирования температуры тяговых электрических машин, содержащее осевой вентилятор с независимым от скорости вращения вала дизель-генератора nдг управляемым приводом рабочего колеса, механизм поворота лопаток рабочего колеса вентилятора с приводом и систему управления с математической моделью работы вентиляторной установки, реализующей оптимальный выбор параметров nв и αв, обеспечивающий наиболее экономичный режим работы вентиляторной установки во всем диапазоне изменения вентилятором подачи воздуха [6]. Недостатком этого устройства является то, что в нем не учитываются характеристики КПД привода рабочего колеса вентилятора и зависимости этого КПД от соотношения скоростей вращения входного и выходного валов привода рабочего колеса.
Предлагаемое устройство согласованного автоматического управления приводами осевого вентилятора отличается от известных устройств тем, что в нем обеспечивается технический результат, который определяется при заданной подаче рабочего колеса сочетанием таких режимов работы привода рабочего колеса и рабочего колеса вентилятора, то есть выбором таких значений параметров nв и αв, при которых обеспечивается наименьший расход мощности на привод рабочего колеса вентилятора. Таким образом, предлагаемое устройство согласованного автоматического управления приводами осевого вентилятора обеспечивает при любых заданных подачах рабочего колеса наименьшие затраты мощности на его привод.
Предлагаемое устройство согласованного автоматического управления приводами осевого вентилятора (фиг.1. Принципиальная блок-схема устройства согласованного автоматического управления приводами рабочего колеса и механизма поворота лопаток осевого вентилятора) содержит: систему управления 10 с математической моделью совместной работы рабочего колеса вентилятора с сетью вентиляторной установки и алгоритмом управления приводами рабочего колеса и механизма поворота его лопаток при поиске значений параметров nв и αв, при которых обеспечивается наименьший расход мощности на привод рабочего колеса вентилятора, рабочее колесо 3, привод рабочего колеса 4, позволяющий плавно изменять скорость вращения вала рабочего колеса, привод механизма поворота лопаток 1 рабочего колеса, предназначенный для плавного изменения угла наклона лопаток рабочего колеса, блок вычисления мощности потока подаваемого вентилятором воздуха (первый блок вычисления мощности) 11, блок вычисления мощности, затрачиваемой на привод рабочего колеса (второй блок вычисления мощности) 7, блок сравнения (деления) мощностей 8, датчики скорости вращения вала рабочего колеса 5, угла наклона лопаток рабочего колеса 2, скорости вращения входного вала привода рабочего колеса 6, напора воздуха 12 в воздухопроводе 13, подачи вентилятора 14 и температуры воздуха 15.
Математическая модель совместной работы рабочего колеса 3 вентилятора с сетью вентиляторной установки предназначена для приведения подачи Gвз вентилятора в соответствие с входным сигналом задания ϕз и формирования сигналов управляющих воздействий γ1 и γ2, подаваемых на входы привода 4 рабочего колеса и привода 1 механизма поворота лопаток рабочего колеса 3. Математическая модель дополнительно содержит программу выбора таких значений скорости вращения nв вала рабочего колеса 3 и угла ав наклона его лопаток, которые обеспечивают наименьшие затраты мощности системой привод рабочего колеса - рабочее колесо при заданной подаче Gвз вентилятором воздуха. Блок 8 сравнения (деления) мощностей N1 и N2 предназначен для вычисления КПД η системы привод рабочего колеса - рабочее колесо, который равен произведению КПД привода рабочего колеса и КПД рабочего колеса. Система управления содержит также алгоритм вычисления среднеэксплуатационного КПД η системы привод рабочего колеса - рабочее колесо путем суммирования по времени его значений и последующего деления на время записи. Знание среднеэксплуатационного КПД очень важно для сравнительной оценки таких устройств с разными типами приводов рабочего колеса вентилятора. Система управления содержит монитор 9 для визуального представления информации.
Для определения затрат мощности на привод рабочего колеса осевого вентилятора необходимо знать зависимость мощности на валу рабочего колеса от скорости его вращения.
Гидродинамический привод рабочего колеса вентилятора содержит обычно повышающий и понижающий зубчатые редукторы, гидродинамическую муфту переменного наполнения и валы. Скорость вращения рабочего колеса изменяется путем изменения наполнения муфты на ее входе или на выходе [1-4, 7].
Гидрообъемный привод рабочего колеса вентилятора содержит обычно повышающий зубчатый редуктор, гидронасос, гидродвигатель, масляный бак, охладитель масла, фильтр и трубопроводы. Скорость вращения рабочего колеса изменяется путем перепуска масла мимо гидродвигателя (дроссельное управление гидродвигателем) или изменением подачи насоса (объемное управление насосом) [1-4, 7].
Мощность, затрачиваемая на гидравлический (гидродинамический или гидрообъемный) привод рабочего колеса осевого вентилятора, определяется по формуле [8, стр.37-38; 9, стр.234, 255 и 264]
где Nрк - мощность на валу рабочего колеса вентилятора,
ηрр, ηyp - КПД раздаточного (повышающего) и углового (понижающего) зубчатых редукторов;
ηгп - КПД гидродинамической муфты переменного наполнения (в гидродинамическом приводе) или системы гидронасоса и гидродвигателя (в гидрообъемном приводе)

n1 и n2 - соответственно скорость вращения вала насосного колеса гидромуфты (в гидродинамическом приводе) или гидронасоса (в гидрообъемном приводе) и вала турбинного колеса (в гидродинамическом приводе) или гидродвигателя (в гидрообъемном приводе);

nрк - скорость вращения рабочего колеса вентилятора;
iyp - передаточное число углового редуктора (при гидродинамическом приводе рабочего колеса);
n1=nдгiрр,
kв - коэффициент пропорциональности; определяется по номинальным (паспортным) параметрам рабочего колеса вентилятора
В результате получаем
или, так как передаточные числа зубчатых редукторов постоянны, их КПД тоже можно принять постоянными, то
Nвд=kвдnрк 2nдг.
Таким образом, мощность, отбираемая на гидравлический привод рабочего колеса вентилятора, определяется произведением квадрата скорости его вращения и скорости вращения входного вала привода рабочего колеса.
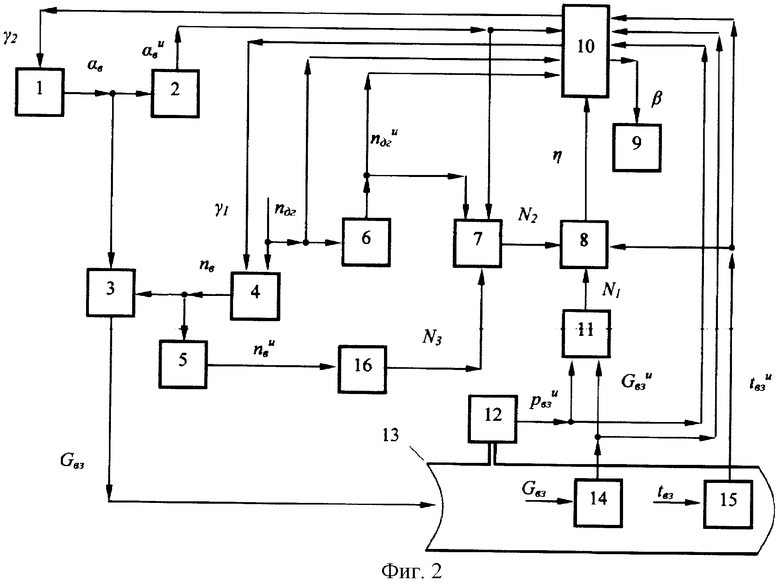
Устройство согласованного автоматического управления гидравлическим (гидродинамическим или гидрообъемным) приводом рабочего колеса и приводом механизма поворота лопаток осевого вентилятора (фиг.2. Принципиальная блок-схема устройства согласованного автоматического управления гидравлическим приводом рабочего колеса и приводом механизма поворота лопаток рабочего колеса осевого вентилятора) содержит блок 16 возведения в квадрат выходного сигнала датчика скорости вращения nв u вала рабочего колеса 3, блок перемножения выходных сигналов датчика 7 скорости вращения входного вала пдг u привода рабочего колеса и блока 16 возведения в квадрат выходного сигнала датчика 7 скорости вращения вала рабочего колеса, соединенный с блоком 8 сравнения (деления) мощностей N1 и N2.
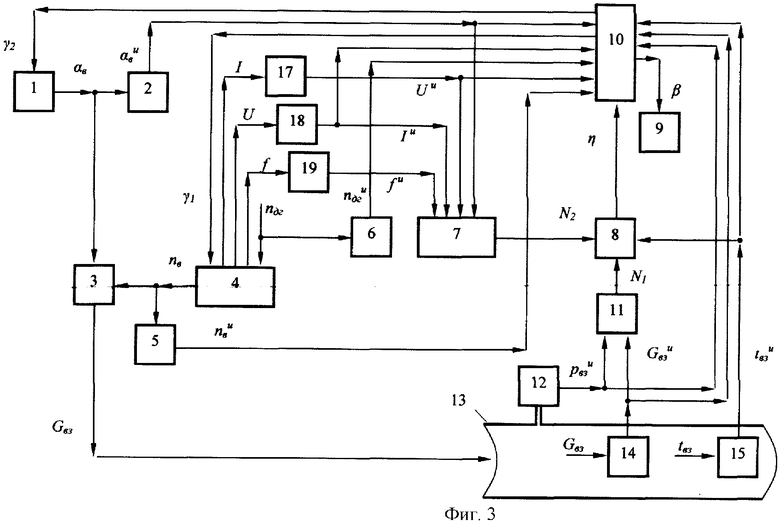
Устройство согласованного автоматического управления электрическим (постоянного или переменного тока) приводом осевого вентилятора (фиг.3. Принципиальная блок-схема устройства согласованного автоматического управления электрическим приводом рабочего колеса и приводом механизма поворота лопаток рабочего колеса осевого вентилятора) содержит датчики тока 17, напряжения 18 и частоты напряжения 19 (для электрического привода переменного тока), блок вычисления электрической мощности 7, затрачиваемой на привод рабочего колеса, блок деления электрической мощности на КПД генератора, соединенный с блоком сравнения (деления) мощности потока подаваемого вентилятором воздуха и электрической мощности, затрачиваемой на электрический привод рабочего колеса (или механической мощности на валу генератора электрического привода рабочего колеса) вентиляторной установки 8.
Предлагаемое устройство согласованного автоматического управления приводами осевого вентилятора (см. фиг.1) фактически представляет собой автоматическую систему экстремального регулирования мощности, затрачиваемой на привод рабочего колеса вентилятора [12-15]. В этой системе экстремальным объектом управления являются приводы рабочего колеса вентилятора и механизма поворота его лопаток. Он может быть описан следующими уравнениями:

где ТПВ и ТПЛ - постоянные времени привода рабочего колеса вентилятора и привода механизма поворота его лопаток;
kПВ и kПЛ - коэффициенты, постоянные для заданной подачи рабочего колеса вентилятора.
При гидравлических приводах рабочего колеса значения постоянной времени ТПВ больше значений постоянной времени ТПЛ. При электрических приводах рабочего колеса наоборот значения постоянной времени ТПЛ больше значений постоянной времени ТПВ. Для экстремальных автоматических систем регулирования это имеет большое значение, так как поиск экстремума система регулирования всегда начинает по каналу более инерционному. Основной процесс в системе экстремального регулирования - это автоматический непрерывный поиск, заключающийся в изменении входного сигнала объекта (γ1 или γ2), анализе результатов этого воздействия и определении дальнейшего направления изменения входного сигнала объекта с целью достижения экстремума выходного сигнала объекта (в нашем случае мощности N2, затрачиваемой на привод рабочего колеса вентилятора) при заданных условиях (в нашем случае при заданной подаче рабочего колеса Q).
Предлагаемое устройство согласованного автоматического управления приводами осевого вентилятора (см. фиг.1) работает следующим образом. Так как регулируемая величина - мощность N2 - зависит от двух переменных (nв и αв), то автоматический поиск экстремума система экстремального регулирования производит по двум координатам nв и αв, начиная при гидравлических приводах рабочего колеса с координаты nв, а при электрических приводах - с αв.
Существуют различные методы поиска экстремума в многомерных автоматических экстремальных системах. Из них наиболее распространенными являются методы Гаусса-Зейделя, градиента, наискорейшего спуска. При работе системы по методу Гаусса-Зейделя система ищет экстремум сначала по одной координате, при фиксированном значении второй, а затем - по другой. Для инерционных объектов (как в нашем случае) наилучшим является шаговый оптимизированный метод. Но если учесть, что техническая реализация шагового метода наиболее проста, то для определения частных производных (в нашем случае dN2/dnв и dN2/dαв) при многомерных инерционных объектах наиболее целесообразным является метод пробных шагов.
При сравнении шаговых методов для двумерного объекта (нашего типа) наилучшим (в смысле времени поиска) оказался метод градиента. Работа системы при оптимизированном методе градиента заключается в том, что после пробного шага по одному каналу (например, по каналу сигнала γ1) система управления 10 (см. фиг.1) не возвращается в исходную точку, а делает пробный шаг по другому каналу (по каналу сигнала γ2). При этом заведомо допускается ошибка в определении величины рабочего шага, равная величине пробного шага, но зато время, затрачиваемое на измерение частных производных dN2/dnв и dN2/dαв, уменьшается вдвое. Благодаря высокой точности, быстродействию и несложной реализации этот метод нашел применение в двухканальных экстремальных системах регулирования и показал высокую эффективность на ряде промышленных объектов [13].
Источники информации
1. Луков Н.М. Автоматическое регулирование температуры двигателей. - М.: Машиностроение, 1995. - 271 с.
2. Космодамианский А.С. Измерение и регулирование температуры обмоток тяговых электрических машин локомотивов: Монография. - РГО-ТУПС, 2002. - 285 с.
3. Луков Н.М. Автоматизация тепловозов, газотурбовозов и дизель-поездов. - М.: Машиностроение, 1988. - 272 с.
4. Н.М.Луков, А.С.Космодамианский, В.М.Попов. Исполнительно-регулирующие устройства для АСРТ тягового электрооборудования локомотивов// Сб. научн. трудов по материалам научно-методич. конф. РГО-ТУПС «Актуальные проблемы и перспективы развития железнодорожного транспорта», М., 2000. - Ч. 1 - С. 72-74.
5. А.с. 544050 (СССР). Устройство для автоматического регулирования температуры электрической машины/ Цурган О.В., Петрожицкий А.А., Петраков В.А., Комаров Г.А., Луков Н.М. - Опубл. в Б.И., 1977, № 3, Кл. Н 02 К 9/04.
6. Патент РФ 2201028. Исполнительно-регулирующее устройство для автоматических систем регулирования температуры обмоток тяговых электрических машин/ А.С.Космодамианский, Н.М.Луков, Алейников И.А. - Опубл. в Б.И. 2003, № 8, Кл. 7 Н 02 К 9/04, Н 02 Н 7/06.
7. Луков Н.М. Основы автоматики и автоматизации тепловозов. - М.: Транспорт, 1989. - 296 с.
8. Луков Н.М. и др. Определение затрат энергии на привод вентилятора холодильника при дискретном и непрерывном регулировании его производительности./ Тр. ВЗИИТа. - М., 1976. Вып.83. С. 31-44.
9. Тепловозы./ Под ред. Н.И.Панова. - М.: Машиностроение, 1976. - 544 с.
10. Луков Н.М. и др. Работа асинхронного двигателя при переменной частоте с вентилятором переменной производительности./ Сб. Трансп. машиностроение, ЦНИИТЭИТМ. - М.: 1971. Вып.5-71-3. С. 83-87.
11. А.с. 246165 (СССР). Устройство для автоматического регулирования температуры в системе охлаждения/ Луков Н.М. - Опубл. в Б.И., 1969, № 20, Кл. 42 q, 3/06 МПК G 05 d.
12. Растригин Л.А. Системы экстремального управления. - М.: Наука, 1974, стр.345-357.
13. Александровский Н.М., Егоров С.В., Кузин Р.Е. Адаптивные системы автоматического управления сложными технологическими объектами. - М.: Наука, 1973.
14. Олейников В.А., Зотов Н.С., Пришвин А.М. Сборник задач и примеров по теории автоматического управления. - М.: Высшая школа, 1969, стр.159-167.
15. Либерзон Л.М., Родов А.Б. Шаговые экстремальные системы. - М.: Энергия, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНО-РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКИХ СИСТЕМ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ОБМОТОК ТЯГОВЫХ ЭЛЕКТРИЧЕСКИХ МАШИН | 2000 |
|
RU2201028C2 |
| РЕГУЛЯТОР ТЕМПЕРАТУРЫ ОБМОТОК ТЯГОВЫХ ЭЛЕКТРИЧЕСКИХ МАШИН ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2251779C2 |
| РЕГУЛЯТОР ТЕМПЕРАТУРЫ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2214929C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ОХЛАЖДАЮЩЕЙ СРЕДЫ ТЕПЛОВОЙ МАШИНЫ | 2003 |
|
RU2264544C2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ТЯГОВОГО ТРАНСФОРМАТОРА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2280567C2 |
| РЕГУЛЯТОР ТЕМПЕРАТУРЫ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2241837C2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ОБМОТОК ТЯГОВЫХ ЭЛЕКТРИЧЕСКИХ МАШИН С ЭЛЕКТРИЧЕСКИМ НА ПЕРЕМЕННОМ ТОКЕ ПРИВОДОМ ВЕНТИЛЯТОРА | 2003 |
|
RU2256996C1 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ТЕПЛОВОЙ МАШИНЫ С МЕХАНИЧЕСКИМ ПРИВОДОМ ВЕНТИЛЯТОРА | 2011 |
|
RU2492335C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ОБМОТОК ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2177669C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 1997 |
|
RU2121209C1 |
Изобретение относится к автоматическим системам регулирования температуры элементов оборудования с воздушными системами охлаждения, содержащими осевые вентиляторы, в частности к автоматическим системам регулирования температуры теплоносителей дизель-генераторных установок и автоматическим системам регулирования температуры обмоток тяговых электрических машин и преобразователей локомотивов. Устройство согласованного автоматического управления приводами осевого вентилятора содержит: систему управления с математической моделью совместной работы рабочего колеса вентилятора с сетью вентиляторной установки, собственно вентилятор с рабочим колесом, привод рабочего колеса, позволяющий плавно изменять скорость вращения вала, привод механизма поворота лопаток рабочего колеса, предназначенный для плавного изменения угла поворота лопаток, блок вычисления мощности потока подаваемого охлаждающего воздуха, блок вычисления мощности, затрачиваемой на привод рабочего колеса, блок сравнения мощностей, датчики скорости вращения вала рабочего колеса, угла поворота лопаток рабочего колеса, скорости вращения входного вала привода рабочего колеса, напора, подачи и температуры охлаждающего воздуха. Математическая модель совместной работы рабочего колеса вентилятора с сетью вентиляторной установки предназначена для приведения подачи охлаждающего воздуха в соответствие с входным сигналом задания и формирования сигналов управляющих воздействий, подаваемых на входы привода рабочего колеса и привода механизма поворота лопаток рабочего колеса. Математическая модель дополнительно содержит программу выбора таких значений скорости вращения вала рабочего колеса и угла поворота его лопаток, которые обеспечивают максимальный КПД системы рабочее колесо - привод рабочего колеса при заданной подаче охлаждающего воздуха. Блок сравнения мощностей предназначен для вычисления КПД системы рабочее колесо - привод рабочего колеса, который равен произведению КПД рабочего колеса и КПД привода рабочего колеса. Изобретение позволяет обеспечить наиболее экономичный режим работы системы рабочее колесо вентилятора - привод рабочего колеса вентилятора. 2 з.п. ф-лы, 3 ил.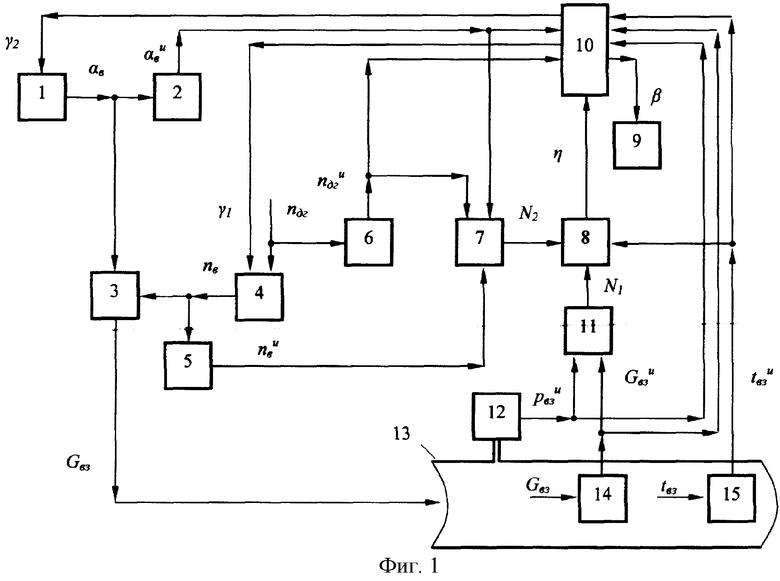
| ИСПОЛНИТЕЛЬНО-РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКИХ СИСТЕМ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ОБМОТОК ТЯГОВЫХ ЭЛЕКТРИЧЕСКИХ МАШИН | 2000 |
|
RU2201028C2 |

