Область техники, к которой относится изобретение
Автоматический комбинированный микропроцессорный регулятор температуры тепловой машины с механическим приводом вентилятора относится к транспортному машиностроению, в частности к области автоматических систем регулирования температуры теплоносителей (воды, масла, наддувочного воздуха, высоконагретой детали и др.) в системах охлаждения энергетических установок транспортных средств (локомотивов, автомобилей, тракторов и др.).
Уровень техники
Известны автоматические системы регулирования и регуляторы температуры, совокупность признаков которых сходна с совокупностью существенных признаков предлагаемого изобретения.
Известна система регулирования температуры охлаждающей среды тепловой машины, содержащая систему охлаждения с воздушно-жидкостным радиатором и насосом, соединенные трубопроводами, с размещенным в них датчиком температуры, вентилятор, вал которого соединен с валами двух одинаковых асинхронных двигателей с фазными роторами [Патент РФ №2264544]. Статорные обмотки асинхронных двигателей подключены к генератору переменного тока, приводимому от тепловой машины. Роторные обмотки асинхронных двигателей соединены последовательно и подключены к выпрямителю. Статор одного из асинхронных двигателей выполнен поворотным и соединен с датчиком температуры посредством первого блока управления и микропроцессорного контроллера, к которому подключен второй блок управления тепловой машиной. В трубопровод системы охлаждения на выходе из тепловой машины включен полупроводниковый термоэлектрический охладитель, соединенный с выходом выпрямителя. Система регулирования температуры охлаждающей среды тепловой машины снабжена устройством замыкания роторных обмоток асинхронных двигателей, подключенным к микропроцессорному контроллеру.
Известна также система регулирования температуры наддувочного воздуха тепловой машины, содержащая нагнетатель наддувочного воздуха для нагнетания его через теплообменник в тепловую машину, охлаждаемую водой [Патент РФ №2256090]. Поток воды распределяется трехходовым перепускным клапаном с исполнительным механизмом между теплообменником и водо-воздушным радиатором, обдуваемым воздухом, подаваемым вентилятором и проходящим через поворотные створки жалюзи. Датчик температуры наддувочного воздуха установлен на магистрали нагнетания воздуха между теплообменником и тепловой машиной для управления двумя исполнительными механизмами, один из которых связан с клапаном, а другой - с поворотными створками жалюзи. Вал вентилятора соединен с валами двух одинаковых асинхронных двигателей с фазными роторами, статорные обмотки которых подключены к генератору переменного тока, приводимому во вращение от вала тепловой машины. Роторные обмотки асинхронных двигателей соединены последовательно и подключены к выпрямителю, к выходу которого подключен термоэлектрический охладитель, управляемый переключателем полярности, соединенным с первым выходом микропроцессорного контроллера. Блок замыкания роторных обмоток соединен со вторым выходом микропроцессорного контроллера. Статор одного из асинхронных двигателей выполнен поворотным и связан с приводом, подключенным к третьему выходу микропроцессорного контроллера. К четвертому и пятому выходам микропроцессорного контроллера подключены исполнительные механизмы трехходового перепускного клапана и поворотных створок жалюзи, а к двум его входам подключены датчики температуры наддувочного воздуха и температуры воды тепловой машины.
Регуляторы температуры, входящие в состав этих автоматических систем регулирования с электрическим приводом вентилятора, имеют существенные недостатки. Они отличаются большой сложностью, пониженной надежностью и пониженным КПД. В регуляторах применено два двигателя вместо одного. Один из двигателей выполнен с поворотным статором, соединенным с механизмом поворота. Эти двигатели с фазным ротором имеют надежность меньшую, чем надежность двигателей с короткозамкнутым ротором. Из-за наличия в цепи роторных обмоток двигателей резисторов номинальные значения КПД двигателей понижены на 6-9%.
Аналоги предлагаемого изобретения, наиболее близкие к нему по совокупности существенных признаков (прототип)
Известны автоматические релейные двухпозиционные регуляторы температуры охлаждающих сред дизеля, применяемые на тепловозах серий ТЭ3, ТЭ7, ТЭМ1, ТЭМ2, ТЭМ2У, ТЭМ18Д и др. [Тепловоз ТЭ3 / К.А. Шишкин, Л.Н. Гуревич, А.Д. Степанов и др. - М.: Транспорт, 1976. Тепловозы ТЭМ1 и ТЭМ2 / П.М. Аронов, В.А. Бажинов, Д.А. Батурин и др. - М.: Транспорт, 1976, стр.86-98. Тепловоз ТЭМ2У. - М.: Транспорт, 1988, стр.34-46. Приводы вспомогательных механизмов / А.С. Космодамианский, М.И. Борзенков, В.И. Воробьев и др. - Орел: ОрелГТУ, 2007, стр.38-52]. В этих регуляторах температурные функции управляющих органов выполняют двухпозиционные термореле (с датчиком температуры с жидким наполнителем) с электропневматическими вентилями, функции исполнительного механизма выполняет механический привод вентилятора, а функции регулирующего органа выполняет осевой вентилятор охлаждения. Механический привод вентилятора охлаждения содержит угловой зубчатый редуктор, входной вал которого соединяется с помощью валов с валами дизеля и фрикционной муфты (фрикциона) с органом управления, содержащим пневматический поршневой пружинный одностороннего действия механизм включения и выключения муфты и электропневматический вентиль. Выходной вал углового редуктора соединяется с валом вентилятора охлаждения.
Механический привод вентилятора имеет более высокий КПД, чем гидродинамический, гидрообъемный и электрический приводы. КПД механического привода вентилятора остается высоким на всех режимах работы, тогда как КПД гидродинамического, гидрообъемного и электрического приводов уменьшаются при уменьшении частоты вращения вентилятора охлаждения. Механический привод вентилятора также имеет меньшую удельную массу на единицу мощности, меньшие габаритные размеры и меньшую стоимость.
Однако автоматические релейные двухпозиционные регуляторы температуры охлаждающих сред дизеля с механическим приводом (с одной ступенью передачи) вентилятора охлаждения имеют существенные недостатки.
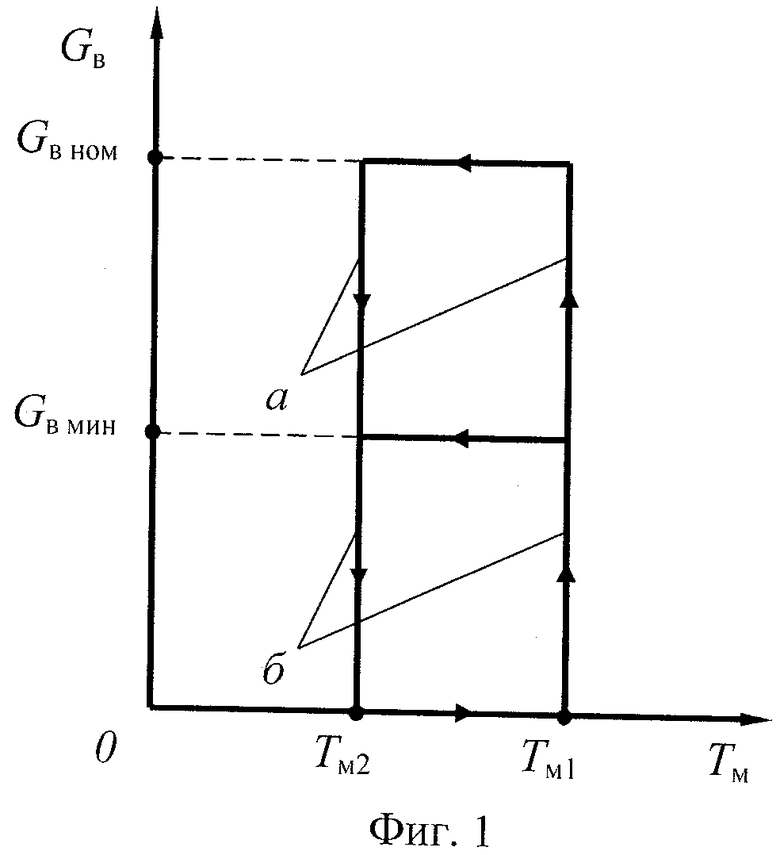
Регулирование температуры охлаждающих сред дизеля осуществляется релейно путем включения и выключения вентилятора при срабатывании термореле. Статические характеристики автоматического релейного двухпозиционного регулятора температуры охлаждающих сред дизеля имеют вид петли и представлены на фиг.1 (Фиг.1. Статические характеристики автоматического релейного двухпозиционного регулятора температуры охлаждающих сред дизеля: а - при номинальной частоте вращения, соответствующей номинальной подаче вентилятора Gв ном; б - при минимальной частоте вращения вала дизеля, соответствующей минимальной подаче вентилятора Gв мин). Разность температур включения Тм2 и выключения Tм1 вентилятора представляет собой зону нечувствительности (возврата) регулятора 2ΔZнч, которая является статическим параметром настройки регулятора. Включения и выключения вентилятора приводят к колебаниям температуры охлаждающих сред дизеля со значительными амплитудами и к увеличенному расходу топлива дизелем, к уменьшению его ресурса и к увеличению вредных выбросов в атмосферу с выхлопными газами. Колебания температуры охлаждающих сред дизеля со значительными амплитудами приводят к уменьшению надежности радиаторов охлаждающего устройства и к увеличенным затратам энергии на привод вентилятора. При включении вентилятора из-за большого момента инерции вентиляторного колеса наблюдаются значительные динамические нагрузки в валопроводе, что приводит к значительному снижению надежности привода вентилятора.
Сущность изобретения
Недостатки автоматического релейного регулятора температуры охлаждающих сред дизеля с механическим приводом вентилятора охлаждения можно значительно уменьшить путем преобразования его из двухпозиционного в многопозиционный. Чем больше позиций имеет релейный регулятор, тем больше релейная система с таким регулятором приближается к системе непрерывного действия по показателям качества работы. В предлагаемом автоматическом релейном шестипозиционном микропроцессорном регуляторе температуры тепловой машины в механическом приводе вентилятора применена планетарная коробка перемены передач (ПКП) с тремя ступенями передачи. По сравнению с коробками передач, образованными простыми зубчатыми механизмами, ПКП обладают рядом преимуществ [Филичкин Н.В. Анализ планетарных коробок передач транспортных и тяговых машин. - Челябинск, Ю-УрГТУ, 2005, стр.9-12]:
1. Более высокая удельная мощность при малых габаритах и массе. Это обусловлено передачей мощности параллельными потоками одновременно через несколько пассивных звеньев-сателлитов в каждом нагруженном планетарном механизме.
2. Высокие значения КПД.
3. Простота как ручного, так и автоматического управления ПКП.
4. Соосность компоновки, то есть совпадение осей ведущего и ведомого валов.
5. Практически полное отсутствие радиальных нагрузок на основных звеньях ПКП.
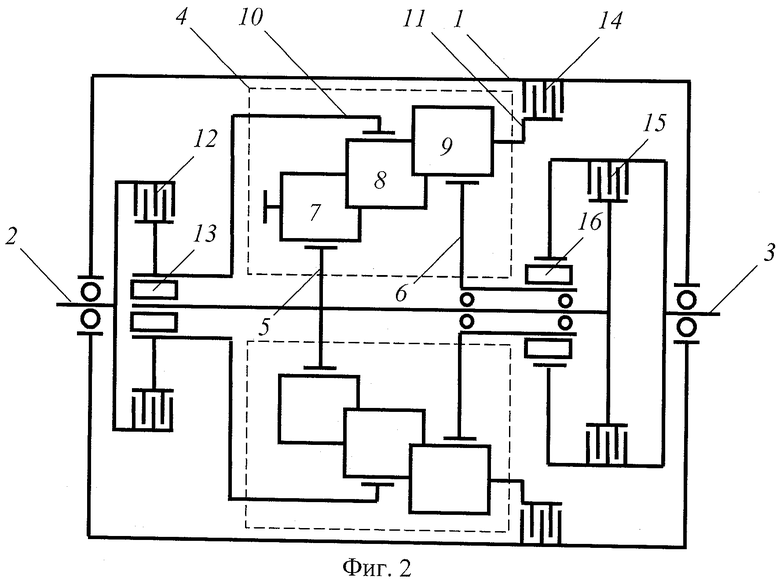
В корпусе 1 ПКП с тремя ступенями передачи (см. фиг.2. Принципиальная схема планетарной коробки перемены передач) установлены входной вал 2, выходной вал 3 и сложный четырехзвенный планетарный механизм компактной структуры 4, который содержит два центральных солнечных зубчатых колеса 5 и 6, три сцепленных между собой сателлита 7, 8, 9 и водило 11. Сателлиты 7, 8 и 9 связаны соответственно:
первый сателлит 7 - с первым центральным солнечным колесом 5, второй сателлит 8 - с эпициклическим колесом 10, а третий 9 - со вторым центральным солнечным колесом 6. Входной вал 2 может быть связан с эпициклическим колесом 10 через первый блокировочный фрикцион (ПБФ) 12, и при этом входной вал 2 имеет возможность соединения при помощи механизма свободного хода 13 с первым центральным солнечным колесом 5. При этом водило 11 может быть остановлено тормозным фрикционом (ТФ) 14. Далее, центральное солнечное зубчатое колесо 5 и выходной вал 3 могут быть связаны при помощи второго блокировочного фрикциона (ВБФ) 15. И, кроме того, выходной вал 3 может быть связан с центральным солнечным зубчатым колесом 6 посредством механизма свободного хода 16.
Такая ПКП обеспечивает исключение разрыва потока мощности при переключении передач путем последовательного включения очередных элементов управления (двух фрикционов ПБФ, ВБФ и одного тормозного фрикциона ТФ) без отключения предыдущих. ПКП работает следующим образом. Для включения первой ступени передачи включается первый блокировочный фрикцион ПБФ 12 и заклиниваются механизмы свободного хода 13 и 16. Вращение с частотой ωм передается с ведущего вала 2 через включенный блокировочный фрикцион ПБФ 12 на эпициклическое колесо 10, через механизм свободного хода 13 - на солнечное колесо 5. При этом, поскольку два звена планетарного механизма 4 приобрели одинаковую угловую скорость, такую же скорость будут иметь остальные два звена планетарного механизма: центральное солнечное зубчатое колесо 6 и водило 11. Центральное солнечное колесо 6 через заклиненный механизм свободного хода 16 приведет во вращение с частотой ωк выходной вал 3.
Для включения второй ступени передачи ПКП включается тормозной фрикцион ТФ 14, при этом первый блокировочный фрикцион ПБФ 12 не выключается, но отключается механизм свободного хода 13 из-за того, что при остановленном водиле 11 солнечное колесо 5 приобретет большую, чем у эпициклического колеса 10 угловую скорость. Вращение передается с входного вала 2 ПКП через оставленный включенным блокировочный фрикцион ПБФ 12 на эпициклическое колесо 10, далее на третий сателлит 9 и второе центральное солнечное колесо 6, с него на оставшийся заклиненным механизм свободного хода 16 и на выходной вал 3.
Для включения третьей ступени передачи ПКП включается второй блокировочный фрикцион ВБФ 15, при этом первый блокировочный фрикцион ПБФ 12 и тормозной фрикцион ТФ 14 остаются включенными, а механизм свободного хода 16 расклинивается, так как из-за включения второго блокировочного фрикциона ВБФ 15 выходной вал 3 приобретает угловую скорость, большую, чем у солнечного колеса 6. Вращение передается с ведущего вала 2 ПКП через включенный первый блокировочный фрикцион ПБФ 12 на эпициклическое колесо 10, далее на второй сателлит 8, первый сателлит 7 и с него - на первое центральное солнечное колесо 5, второй блокировочный фрикцион ВБФ 15 и на выходной вал 3.
Таким образом, при работе ПКП при переходе с передачи на смежную ступень передачи как в восходящем, так и в нисходящем порядке не происходит разрыва потока мощности, поскольку не отключаются включенные предыдущие управляющие элементы, а подключается следующий при переключении на высшую, либо выключается последний при переходе на низшую ступень передачи, что сопровождается автоматическим заклиниванием или расклиниванием механизмов свободного хода 13 и 16.
Для управления фрикционами ПКП применяются пневматические или гидравлические устройства (органы управления), содержащие электропневматический или электрогидравлический вентиль (клапан) и пневматический или гидравлический поршневой или мембранный пружинный одностороннего действия механизм.
В предлагаемом автоматическом комбинированном микропроцессорном регуляторе температуры тепловой машины механический привод вентилятора имеет более высокую надежность, так как вентилятор включается в работу только на первой ступени передач, обеспечивающей пониженную частоту вращения вала вентиляторного колеса ωв, например, 0,2 от номинального значения. Затем следующее увеличение частоты вращения вентиляторного колеса ωв при переходе с первой на вторую ступень передачи также небольшое и осуществляется без предварительного выключения вентилятора. Увеличение частоты вращения вентиляторного колеса ωв при переходе со второй на третью ступень передачи также небольшое и осуществляется без предварительного выключения вентилятора. Эти условия обуславливают пониженные динамические нагрузки в элементах привода вентилятора и значительное повышение его надежности. При частоте вращения 0,2 от номинального значения вентиляторного колеса подача вентилятора Gв ном составляет 0,2, вращающий момент на валу вентилятора составляет 0,04, а мощность 0,008 от номинальных значений. На второй ступени передачи, обеспечивающей также пониженную частоту вращения вентиляторного колеса ωв, например, 0,5 от номинального значения. При такой частоте вращения вентиляторного колеса подача вентилятора Gв составляет 0,5, вращающий момент на валу вентилятора составляет 0,25, а мощность 0,125 от номинальных значений.
Применение пониженных ступеней передач и частот вращения вентилятора обеспечивает уменьшение затрат энергии на привод вентилятора, повышение надежности привода и уменьшение амплитуды и частоты колебаний температуры тепловой машины Tм, что приводит к уменьшению расхода топлива тепловой машиной и к повышению надежности радиаторов ее охлаждающего устройства.
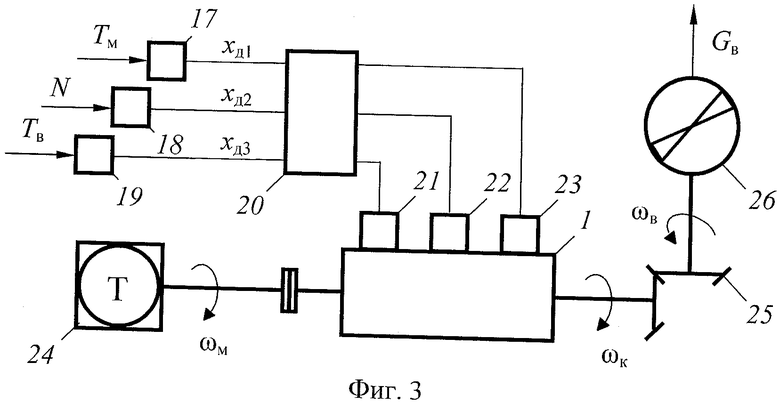
Автоматический комбинированный микропроцессорный регулятор температуры тепловой машины с механическим приводом вентилятора (см. фиг.3. Принципиальная схема автоматического комбинированного микропроцессорного регулятора температуры тепловой машины с механическим приводом вентилятора) содержит датчик 17 температуры тепловой машины Tм (ДТМ), датчик 18 мощности тепловой машины N (ДМ) и датчик 19 температуры наружного охлаждающего воздуха Tв (ДТВ), микропроцессорный контроллер 20 (МПК), планетарную коробку перемены передач 1 ПКП, три органа управления фрикционами (ОУФ): 21 - первым блокировочным фрикционом, 22 - тормозным фрикционом и 23 - вторым блокировочным фрикционом, тепловую машину 24, которая является приводом входного вала планетарной коробки перемены передач, угловой зубчатый редуктор 25 и вентилятор охлаждения 26 (ВО).
Любая автоматическая система регулирования (АСР) содержит две основные функциональные части: объект регулирования (ОР) и автоматический регулятор (АР). Любой автоматический регулятор содержит две основные соединенные последовательно функциональные части: управляющий орган (УО) и исполнительно-регулирующее устройство (ИРУ). Управляющий орган содержит устройства: измерительное (ИУ) (датчик регулируемой величины), задающее (ЗУ), сравнивающее (СУ) и усилительное. В свою очередь исполнительно-регулирующее устройство содержит две соединенные последовательно функциональные части:
исполнительный механизм (ИМ) и регулирующий орган (РО). В автоматических регуляторах температуры, содержащих в качестве регулирующего органа вентилятор, функции исполнительного механизма выполняет привод вентилятора [Луков Н.М. Основы автоматики и автоматизации тепловозов. - М.: Транспорт, 1989; Луков Н.М. Автоматическое регулирование температуры двигателей. - М.: Машиностроение, (1977), 1995; Луков Н.М., Космодамианский А.С. Автоматические системы управления локомотивов. - М.: ГОУ УМЦ по образованию на ж-д транспорте, 2007].
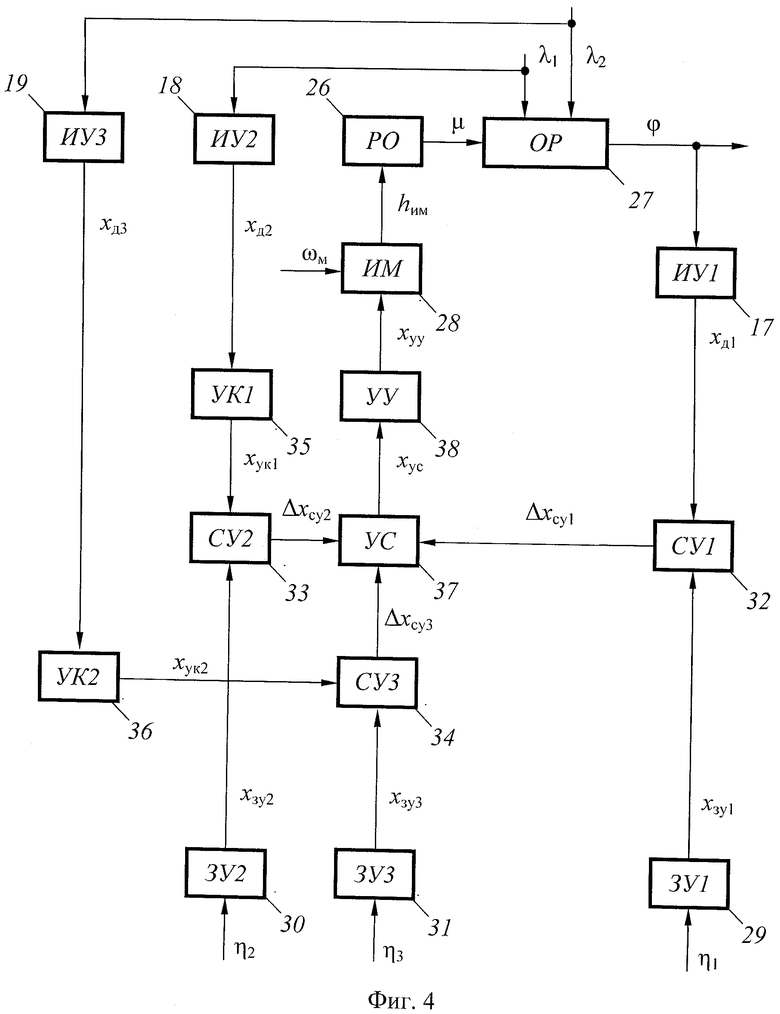
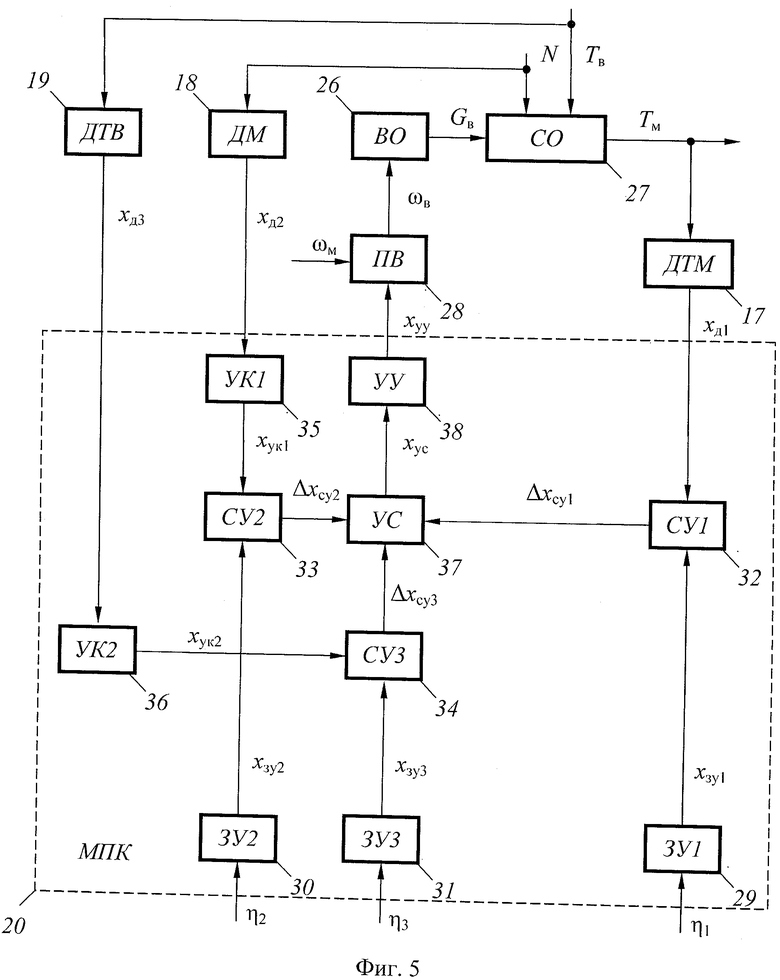
Автоматическая комбинированная микропроцессорная система регулирования температуры тепловой машины с предлагаемым автоматическим комбинированным релейным шестипозиционным микропроцессорным регулятором температуры тепловой машины с механическим приводом вентилятора, содержит следующие функциональные элементы (см. фиг.4. Функциональная схема автоматической комбинированной микропроцессорной системы регулирования температуры тепловой машины с механическим приводом вентилятора): объект регулирования температуры ОР 27 (систему охлаждения тепловой машины - СО), первое измерительное устройство (ИУ1) 17 (датчик температуры тепловой машины - ДТМ) с выходным сигналом хд1, второе измерительное устройство (ИУ2) 18 (датчик мощности тепловой машины - ДМ) с выходным сигналом хд2, третье измерительное устройство (ИУЗ) 19 (датчик температуры охлаждающего воздуха - ДТВ) с выходным сигналом хд3, регулирующий орган РО 26 (вентилятор охлаждения - ВО), исполнительный механизм ИМ 28 (привод вентилятора - ПВ) с выходным сигналом hим, три задающих устройства 29, 30, 31 - (ЗУ1), (ЗУ2) и (ЗУ3) с сигналами задания η1, η2, η3, и с выходными сигналами хзу1, хзу2 и хзу3, три сравнивающих устройства 32, 33, 34 - (СУ1), (СУ2) и (СУ3) с выходными сигналами Δхсу1, Δхсу2 и Δхсу3, два устройства коррекции 35, 36 - (УК1) и (УК2) статических характеристик измерительных устройств ИУ2 и ИУ3, выходные сигналы УК1 и УК2 - хук1 и хук2, устройство суммирования 37 УС выходных сигналов Δхсу1, Δхсу2 и Δхсу3 сравнивающих устройств СУ1, СУ2 и СУ3, выходной сигнал УС - хус и управляющее устройство 38 УУ с выходным сигналом хуу.
Устройства коррекции УК1 и УК2 статических характеристик измерительных устройств ИУ2 и ИУ3 предназначены для установления степени влияния сигналов возмущающих воздействий λ1 и λ2 на регулирующее воздействие и. Степени влияния сигналов возмущающих воздействий λ1 и λ2 на регулирующее воздействие µ, определяются значениями коэффициентов передачи устройств коррекции УК1 и УК2: kук1, kук2 (статические параметры настройки регулятора). Например, температура воды двигателя внутреннего сгорания при постоянной мощности изменяется пропорционально температуре охлаждающего воздуха, а коэффициент пропорциональности (коэффициент передачи системы охлаждения двигателя по температуре охлаждающего воздуха) равен единице [Луков Н.М. Автоматическое регулирование температуры двигателей. - М.: Машиностроение, 1995. стр.39]. Поэтому для уменьшения влияния температуры охлаждающего воздуха на регулирующее воздействие µ, а значит и на температуру воды двигателя внутреннего сгорания, необходимо делать меньше единицы значение коэффициента передачи устройства коррекции УК2.
Выходной сигнал устройства суммирования (УС) определяется из выражения

Принципиальная блок-схема автоматической комбинированной микропроцессорной системы регулирования тепловой машины, содержащей предлагаемый автоматический комбинированный микропроцессорный регулятор температуры тепловой машины с механическим приводом вентилятора, представлена на фиг.5 (Фиг.5. Принципиальная блок-схема автоматической комбинированной микропроцессорной системы регулирования температуры тепловой машины с механическим приводом вентилятора).
Предлагаемый автоматический микропроцессорный шестипозиционный регулятор температуры тепловой машины с механическим приводом вентилятора является комбинированным, так как в нем для управления исполнительно-регулирующим устройством кроме сигнала регулируемой температуры φ - Tм используются еще сигналы внешних возмущающих воздействий λ1 и λ2: мощности тепловой машины N и температуры охлаждающего воздуха Тв. В результате регулирующее воздействие µ на объект регулирования определяется выражением (алгоритмом работы комбинированного регулятора температуры) [Луков Н.М. Основы автоматики и автоматизации тепловозов. - М.: Транспорт, 1989, стр.19; Луков Н.М., Космодамианский А.С. Автоматические системы управления локомотивов. - М.: ГОУ УМЦ по образованию на ж-д транспорте, 2007,стр.22]

где kp, kpλ1, kpλ2 - коэффициенты передачи регулятора по каналам действия регулируемой величины (температуры Тм тепловой машины) и возмущающих воздействий (мощности тепловой машины N и температуры охлаждающего воздуха Tв) являются статическими параметрами настройки регуляторов. Автоматический комбинированный микропроцессорный регулятор температуры тепловой машины с механическим приводом вентилятора содержит три регулятора (фиг.4). Регулятор температуры Tм тепловой машины по отклонению ее от заданного значения вместе с объектом регулирования образует замкнутый контур регулирования и содержит функциональные элементы: ИУ1, СУ1, ЗУ1, УС, УУ, ИМ и РО. Регулятор температуры Tм тепловой машины по мощности тепловой машины вместе с объектом регулирования образует разомкнутый контур регулирования и содержит функциональные элементы: ИУ2, УК1, СУ2, ЗУ2, УС, УУ, ИМ и РО. Регулятор температуры Tм тепловой машины по температуре охлаждающего воздуха вместе с объектом регулирования образует разомкнутый контур регулирования и содержит функциональные элементы: ИУ3, УК2, СУ3, ЗУ3, УС, УУ, ИМ и РО.
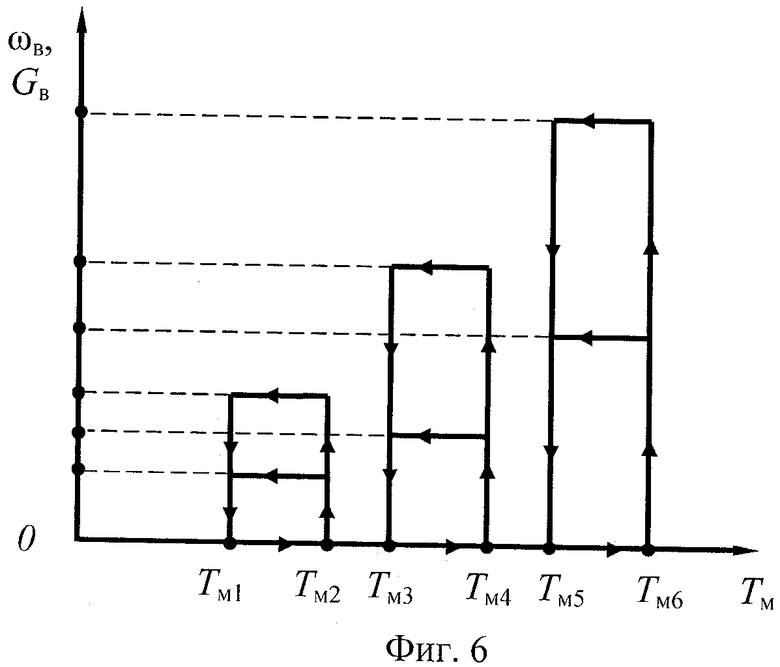
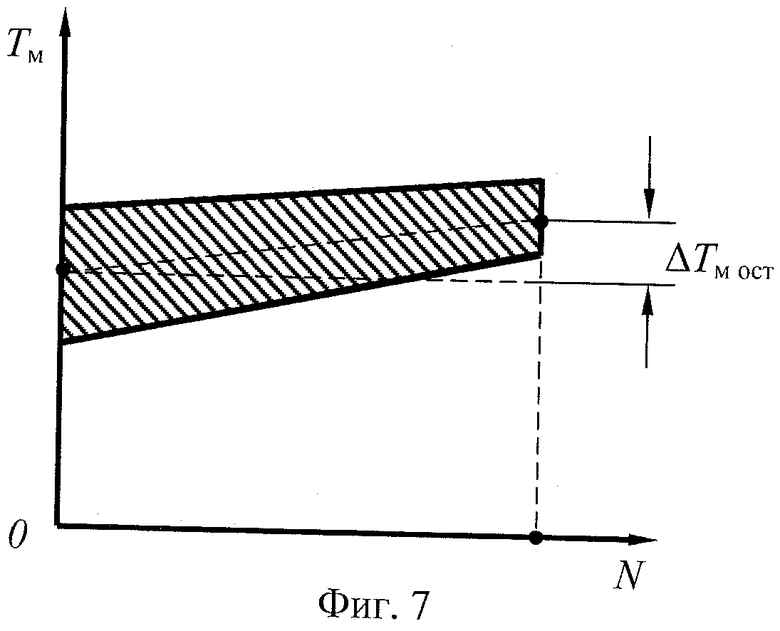
Автоматический комбинированный микропроцессорный регулятор температуры тепловой машины с механическим приводом вентилятора работает следующим образом (фиг.3). При отключенных датчиках 18 и 19 мощности тепловой машины N и температуры охлаждающего воздуха Tв и трехступенчатом зубчатом редукторе в приводе вентилятора микропроцессорный контроллер 20 обеспечивает включение (при повышении температуры Tм тепловой машины 1 до значений: Tм2, Tм4 и Tм6) или выключение (при понижении температуры Tм тепловой машины 1 до значений: Tм1, Tм3 и Тм5) соответствующей передачи. В результате автоматический микропроцессорный шестипозиционный релейный регулятор температуры тепловой машины с механическим приводом вентилятора имеет статические характеристики, представленные на фиг.6 (Фиг.6. Статические характеристики автоматического релейного шестипозиционного микропроцессорного регулятора температуры тепловой машины с механическим приводом вентилятора при номинальной и минимальной частоте вращения вала машины). При таком регуляторе температуры поле статических характеристик автоматической микропроцессорной системы регулирования температуры тепловой машины с механическим приводом вентилятора будет иметь вид, представленный на фиг.7 (Фиг.7. Поле статических характеристик автоматической микропроцессорной системы регулирования температуры тепловой машины с механическим приводом вентилятора). На фиг.7 видно, что при уменьшении мощности тепловой машины N амплитуда и размах колебаний температуры тепловой машины Tм увеличиваются. При этом также увеличивается период колебаний температуры и остаточная неравномерность ΔTм ост. Это обусловлено тем, что при уменьшении мощности тепловой машины N и температуры охлаждающего воздуха Tв увеличиваются постоянная времени и коэффициент передачи системы охлаждения тепловой машины [Попов Е.П. Автоматическое регулирование и управление. - М.: Наука, 1966, стр.309-311; Прусенко B.C. Пневматические системы автоматического регулирования технологических процессов. - М.: Машиностроение, 1987, стр.164, 165, 180-181]. Уменьшение средней температуры тепловой машины Tм при уменьшении мощности тепловой машины N приводит к увеличению расхода топлива тепловой машиной. Увеличение амплитуды и периода колебаний температуры отрицательно сказывается на технико-экономических показателях тепловой машины.
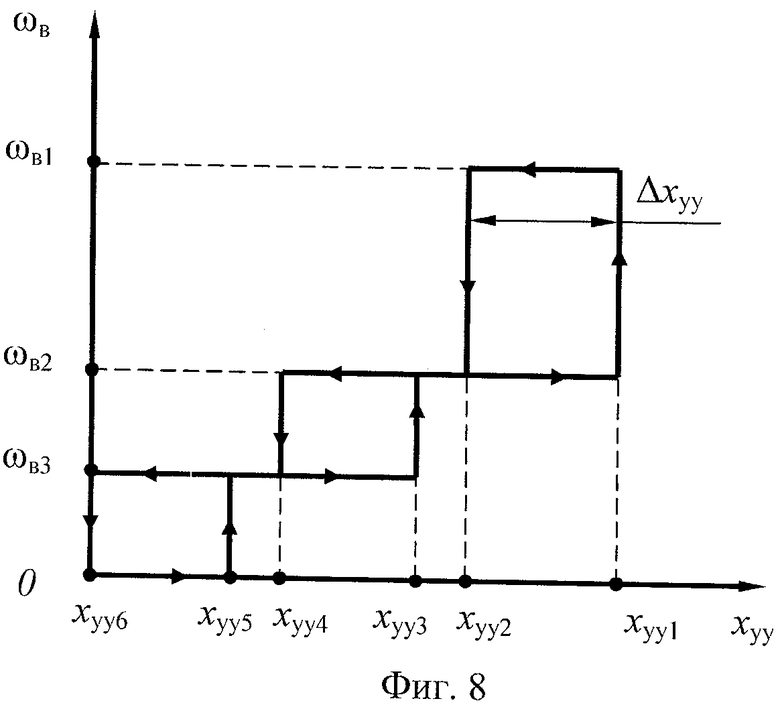
При включенных датчиках 18 и 19 мощности тепловой машины N и температуры охлаждающего воздуха Tв, то есть при действии сигналов по мощности тепловой машины N и температуре охлаждающего воздуха Тв, и при применении в приводе вентилятора планетарной коробки передач (фиг.2) микропроцессорный контроллер 20 в соответствии с программой, заложенной в устройство управления УУ (фиг.4 и 5), обеспечивает включение и выключение соответствующей передачи не только в зависимости от сигнала температуры тепловой машины Tм, но и от сигналов по мощности тепловой машины N и по температуре охлаждающего воздуха Тв. Автоматический комбинированный релейный шестипозиционный микропроцессорный регулятор температуры тепловой машины с механическим приводом вентилятора имеет статические характеристики (Фиг.8. Статические характеристики автоматического комбинированного релейного шестипозиционного микропроцессорного регулятора температуры тепловой машины с механическим приводом вентилятора), отличные от характеристик, приведенных на фиг.6. При этом алгоритм (закон) работы устройства управления УУ приводом вентилятора ПВ имеет вид:
ωв=ωв3 при хуу6<хуу<хуу5 - включены ПБФ и первая передача;
ωв=ωв2 при хуу4<хуу<хуу3 - включены ТФ и вторая передача;
ωв=ωв1 при хуу2<хуу<хуу1 - включены ВБФ и третья передача.
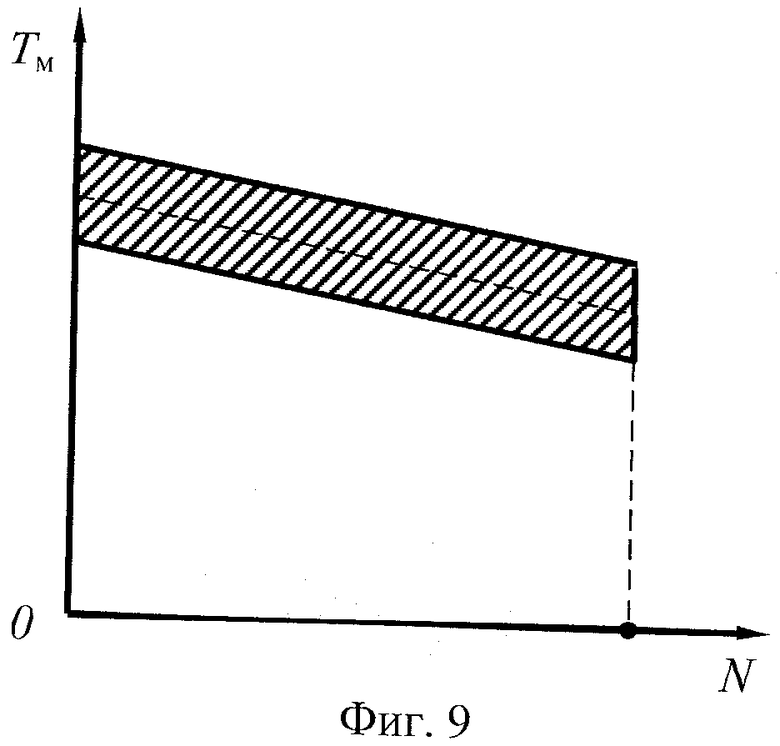
Для того, чтобы при уменьшении мощности тепловой машины N и температуры охлаждающего воздуха Тв не увеличивалась амплитуда колебаний температуры тепловой машины Тм зона нечувствительности устройства управления УУ, а значит и регулятора температуры, уменьшается при уменьшении частоты вращения ωв вентилятора охлаждения ВО. Зона нечувствительности устройства управления УУ: при первой передаче 2ΔZнч1=хуу5-хуу6, при второй передаче 2ΔZнч2=хуу3-хуу4 и при третьей передаче 2ΔZнч3=хуу1-хуу2. Соотношение зон нечувствительности: ΔZнч1=kz1ΔZнч2; ΔZнч2=kz2ΔZнч3; kz1>kz2>1. Значения зоны нечувствительности ΔZнч1 и коэффициентов kz1 и kz2 являются статическими параметрами настройки регулятора. Интервалы хуу4-хуу5 и хуу2-хуу3 составляют 0,1-0,2 от зоны нечувствительности. В результате поле характеристик автоматической комбинированной микропроцессорной системы регулирования температуры тепловой машины, содержащей автоматический комбинированный релейный шестипозиционный микропроцессорный регулятор температуры тепловой машины с механическим приводом вентилятора, будет иметь вид, представленный на фиг.9 (Фиг.9. Поле характеристик автоматической комбинированной микропроцессорной системы регулирования температуры тепловой машины). На фиг.9 видно, что при уменьшении мощности тепловой машины N температуры тепловой машины Тм увеличиваются, что обеспечивает уменьшение расхода топлива тепловой машиной [Луков Н.М. Автоматическое регулирование температуры двигателей. - М.: Машиностроение, 1995, стр.9-11].
Технический результат, который может быть получен при осуществлении предлагаемого изобретения
Осуществление предлагаемого изобретения позволит повысить надежность механического привода вентилятора охлаждения, радиаторов и тепловой машины, уменьшить расход топлива тепловой машиной. Технический результат достигается за счет того, что выходной вал тепловой машины соединен с входным валом углового зубчатого редуктора посредством планетарной коробки перемены передач, в корпусе которой установлены входной вал, выходной вал и четырехзвенный планетарный механизм, который содержит: два центральных солнечных зубчатых колеса и три сцепленных между собой сателлита, связанных соответственно: первый сателлит - с первым центральным солнечным колесом, второй сателлит - с эпициклическим колесом, а третий сателлит - со вторым центральным солнечным колесом, и водило; причем входной вал коробки связан с эпициклическим колесом посредством первого блокировочного фрикциона и при этом входной вал имеет возможность соединения при помощи первого механизма свободного хода с первым центральным солнечным колесом; при этом водило остановлено тормозным фрикционом; центральное солнечное зубчатое колесо и выходной вал связаны при помощи второго блокировочного фрикциона; выходной вал коробки передач связан с центральным солнечным зубчатым колесом посредством второго механизма свободного хода; фрикционы соединены с тремя органами управления, образующими управляющее устройство, содержащими пневматические пружинные одностороннего действия механизмы и электропневматические вентили; планетарная коробка перемены передач и угловой редуктор образуют привод вентилятора, который связан с управляющим устройством; регулятор содержит датчик температуры тепловой машины, датчик мощности тепловой машины и датчик температуры охлаждающего воздуха, причем датчик температуры тепловой машины подключен к первому сравнивающему устройству, датчик мощности тепловой машины и датчик температуры охлаждающего воздуха связаны со вторым и третьим сравнивающими устройствами посредством первого и второго устройств коррекции статических характеристик датчиков; первое, второе и третье сравнивающие устройства связаны соответственно с первым, вторым и третьим задающими устройствами и с устройством суммирования, подключенным в свою очередь к управляющему устройству привода вентилятора, в программу работы которого заложен алгоритм работы комбинированного релейного шестипозиционного микропроцессорного регулятора температуры.
Перечень фигур
Фиг.1. Статические характеристики автоматического релейного двухпозиционного регулятора температуры охлаждающих сред дизеля: а - при номинальной частоте вращения, соответствующей номинальной подаче вентилятора Gв ном; б - при минимальной частоте вращения вала дизеля, соответствующей минимальной подаче вентилятора Gв мин.
Фиг.2. Принципиальная схема планетарной коробки перемены передач.
Фиг.3. Принципиальная схема автоматического комбинированного микропроцессорного регулятора температуры тепловой машины с механическим приводом вентилятора.
Фиг.4. Функциональная схема автоматической комбинированной микропроцессорной системы регулирования температуры тепловой машины с механическим приводом вентилятора.
Фиг.5. Принципиальная блок-схема автоматической комбинированной микропроцессорной системы регулирования температуры тепловой машины с механическим приводом вентилятора.
Фиг.6. Статические характеристики автоматического релейного шестипозиционного микропроцессорного регулятора температуры тепловой машины с механическим приводом вентилятора при номинальной и минимальной частоте вращения вала машины.
Фиг.7. Поле статических характеристик автоматической микропроцессорной системы регулирования температуры тепловой машины с механическим приводом вентилятора.
Фиг.8. Статические характеристики автоматического комбинированного релейного шестипозиционного микропроцессорного регулятора температуры тепловой машины с механическим приводом вентилятора.
Фиг.9. Поле характеристик автоматической комбинированной микропроцессорной системы регулирования температуры тепловой машины.
Перечень позиций, соответствующих на рисунках основным элементам автоматического комбинированного микропроцессорного регулятора температуры тепловой машины с механическим приводом вентилятора
Фиг.2 и 3:
1 - корпус планетарной коробки перемены передач;
2 - входной вал планетарной коробки перемены передач;
3 - выходной вал планетарной коробки перемены передач;
4 - четырехзвенный планетарный механизм компактной структуры планетарной коробки перемены передач;
5 и 6 - центральные солнечные зубчатые колеса планетарной коробки перемены передач;
7, 8 и 9 - сателлиты планетарной коробки перемены передач;
10 - эпициклическое колесо планетарной коробки перемены передач;
11 - водило планетарной коробки перемены передач;
12 - первый блокировочный фрикцион планетарной коробки перемены передач;
13 и 16 - механизмы свободного хода планетарной коробки перемены передач;
14 - тормозной фрикцион планетарной коробки перемены передач;
15 - второй блокировочный фрикцион планетарной коробки перемены передач;
16 - см. поз.13.
Фиг.3, 4 и 5:
17 - датчик температуры тепловой машины (первое измерительное устройство);
18 - датчик мощности тепловой машины (второе измерительное устройство);
19 - датчик температуры наружного охлаждающего воздуха (третье измерительное устройство);
20 - микропроцессорный контроллер;
21 - орган управления первым блокировочным фрикционом;
22 - орган управления тормозным фрикционом;
23 - орган управления вторым блокировочным фрикционом;
24 - тепловая машина;
25 - угловой зубчатый редуктор;
26 - вентилятор охлаждения (регулирующий орган).
Фиг.4 и 5:
27 - объект регулирования температуры (система охлаждения тепловой машины);
28 - исполнительный механизм (привод вентилятора);
29, 30 и 31 - задающие устройства;
32, 33 и 34 - сравнивающие устройства;
35 и 36 - устройства коррекции;
37 - устройство суммирования выходных сигналов сравнивающих устройств;
38 - управляющее устройство.
Перечень условных сокращений
АСР - автоматическая система регулирования
ОР - объект регулирования
АР - автоматический регулятор
УО - управляющий орган
ИРУ - исполнительно-регулирующее устройство
ИУ, ИУ1, ИУ2 и ИУ3 - измерительное устройство
ЗУ, ЗУ1, ЗУ2 и ЗУ3 - задающее устройство
УУ - управляющее устройство
УК1 и УК2 - устройства коррекции
СУ, СУ1, СУ2 и СУ3 - сравнивающее устройство
ИМ - исполнительный механизм
РО - регулирующий орган
ПКП - планетарная коробка перемены передач
ПБФ - первый блокировочный фрикцион
ТФ - тормозной фрикцион
ВБФ - второй блокировочный фрикцион
ДТМ - датчик температуры тепловой машины
ДМ - датчик мощности тепловой машины
ДТВ - датчик температуры наружного охлаждающего воздуха
МПК - микропроцессорный контроллер
ОУФ - орган управления фрикционом
ВО - вентилятор охлаждения
ПВ - привод вентилятора.
Перечень обозначений величин
Gв - подача вентилятора
Gв ном - номинальная подача вентилятора
Gв мин - минимальная подача вентилятора
2ΔZнч - зона нечувствительности (возврата) регулятора
ωм - частота вращения вала тепловой машины
ωк - частота вращения выходного вала планетарной коробки перемены передач
ωв - частота вращения вала вентиляторного колеса
Tм - температура тепловой машины
Tв - температура наружного охлаждающего воздуха
N - мощность тепловой машины
хд1 - выходной сигнал датчика температуры тепловой машины (первого измерительного устройства)
xд2 - выходной сигнал датчика мощности тепловой машины (второго измерительного устройства)
хд3 - выходной сигнал датчика температуры наружного охлаждающего воздуха (третьего измерительного устройства)
hим - выходной сигнал исполнительного механизма (привода вентилятора)
η1, η2 и η3 - сигналы задания
хзу1, хзу2 и хзу3 - выходные сигналы задающих устройств
хук1 и хук2 - выходные сигналы устройств коррекции
Δхсу1, Δхсу2 и Δхсу3 - выходные сигналы сравнивающих устройств
хус - выходной сигнал устройства суммирования выходных сигналов сравнивающих устройств
хуу - выходной сигнал управляющего устройства
λ1 и λ2 - возмущающие воздействия
µ - регулирующее воздействие
kук1 и kук2 - коэффициенты передачи устройств коррекции
φ - сигнал регулируемой величины (температуры тепловой машины)
kр, kpλ1 и kpλ2 - коэффициенты передачи регулятора по каналам действия регулируемой величины и возмущающих воздействий
ΔTм ост - остаточная неравномерность
2ΔZнч1 - зона нечувствительности устройства управления при первой передаче
2ΔZнч2 - зона нечувствительности устройства управления при второй передаче
kz1 kz2 - коэффициенты, характеризующие соотношение зон нечувствительности устройства управления при первой и второй передаче.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ КОМБИНИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ПНЕВМАТИЧЕСКОЙ СИСТЕМЕ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2502115C2 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ТЕПЛОВОЙ МАШИНЫ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ ВЕНТИЛЯТОРА | 2011 |
|
RU2501961C2 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ТЕПЛОВОЙ МАШИНЫ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ ВЕНТИЛЯТОРА | 2011 |
|
RU2503558C2 |
| ПЛАНЕТАРНАЯ КОРОБКА ПЕРЕМЕНЫ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2207459C2 |
| АВТОМАТИЧЕСКАЯ КОМБИНИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ СГЛАЖИВАЮЩЕГО РЕАКТОРА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2406622C2 |
| Автоматическая микропроцессорная система регулирования температуры энергетической установки транспортного средства | 2016 |
|
RU2645519C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРНОГО РЕЖИМА СИЛОВОЙ УСТАНОВКИ ТАНКА | 2020 |
|
RU2755418C1 |
| АВТОМАТИЧЕСКАЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ТЕПЛОНОСИТЕЛЕЙ ТЕПЛОВОЙ МАШИНЫ | 2004 |
|
RU2285135C2 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2426895C1 |
| ТРАНСМИССИЯ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2006 |
|
RU2307758C1 |
Изобретение относится к автоматическим системам регулирования транспортных средств. Автоматический комбинированный микропроцессорный регулятор температуры тепловой машины с механическим приводом вентилятора содержит термореле с датчиком температуры тепловой машины, подключенное к электропневматическому вентилю, выходной вал тепловой машины соединен с входным валом углового зубчатого редуктора посредством планетарной коробки перемены передач, в корпусе которой установлены входной вал, выходной вал и четырехзвенный планетарный механизм, который содержит: два центральных солнечных зубчатых колеса и три сцепленных между собой сателлита, связанных соответственно: первый сателлит - с первым центральным солнечным колесом, второй сателлит - с эпициклическим колесом, а третий сателлит - со вторым центральным солнечным колесом, и водило; причем входной вал коробки связан с эпициклическим колесом посредством первого блокировочного фрикциона и при этом входной вал имеет возможность соединения при помощи первого механизма свободного хода с первым центральным солнечным колесом; при этом водило остановлено тормозным фрикционом; центральное солнечное зубчатое колесо и выходной вал связаны при помощи второго блокировочного фрикциона; выходной вал коробки передач связан с центральным солнечным зубчатым колесом посредством второго механизма свободного хода; фрикционы соединены с тремя органами управления, образующими управляющее устройство, содержащими пневматические пружинные одностороннего действия механизмы и электропневматические вентили; планетарная коробка перемены передач и угловой редуктор образуют привод вентилятора, который связан с управляющим устройством; регулятор содержит датчик температуры тепловой машины, датчик мощности тепловой машины и датчик температуры охлаждающего воздуха, причем датчик температуры тепловой машины подключен к первому сравнивающему устройству, датчик мощности тепловой машины и датчик температуры охлаждающего воздуха связаны со вторым и третьим сравнивающими устройствами посредством первого и второго устройств коррекции статических характеристик датчиков; первое, второе и третье сравнивающие устройства связаны соответственно с первым, вторым и третьим задающими устройствами и с устройством суммирования, подключенным в свою очередь к управляющему устройству привода вентилятора, в программу работы которого заложен алгоритм работы комбинированного релейного шестипозиционного микропроцессорного регулятора температуры. Изобретение обеспечивает повышение надежности механического привода вентилятора охлаждения, радиаторов и тепловой машины, уменьшение расхода топлива тепловой машиной. 9 ил.
Автоматический комбинированный микропроцессорный регулятор температуры тепловой машины с механическим приводом вентилятора, содержащий термореле с датчиком температуры тепловой машины, подключенное к электропневматическому вентилю, угловой зубчатый редуктор, входной вал которого соединен с валом тепловой машины, а выходной вал - с валом вентилятора и фрикционной муфтой (фрикционом), пневматический поршневой пружинный одностороннего действия механизм управления, подключенный к электропневматическому вентилю, отличающийся тем, что выходной вал тепловой машины соединен с входным валом углового зубчатого редуктора посредством планетарной коробки перемены передач, в корпусе которой установлены входной вал, выходной вал и четырехзвенный планетарный механизм, который содержит: два центральных солнечных зубчатых колеса и три сцепленных между собой сателлита, связанных соответственно: первый сателлит - с первым центральным солнечным колесом, второй сателлит - с эпициклическим колесом, а третий сателлит - со вторым центральным солнечным колесом, и водило; причем входной вал коробки связан с эпициклическим колесом посредством первого блокировочного фрикциона и при этом входной вал имеет возможность соединения при помощи первого механизма свободного хода с первым центральным солнечным колесом; при этом водило остановлено тормозным фрикционом; центральное солнечное зубчатое колесо и выходной вал связаны при помощи второго блокировочного фрикциона; выходной вал коробки передач связан с центральным солнечным зубчатым колесом посредством второго механизма свободного хода; фрикционы соединены с тремя органами управления, образующими управляющее устройство, содержащими пневматические пружинные одностороннего действия механизмы и электропневматические вентили; планетарная коробка перемены передач и угловой редуктор образуют привод вентилятора, который связан с управляющим устройством; регулятор содержит датчик температуры тепловой машины, датчик мощности тепловой машины и датчик температуры охлаждающего воздуха, причем датчик температуры тепловой машины подключен к первому сравнивающему устройству, датчик мощности тепловой машины и датчик температуры охлаждающего воздуха связаны со вторым и третьим сравнивающим устройствам посредством первого и второго устройств коррекции статических характеристик датчиков; первое, второе и третье сравнивающие устройства связаны соответственно с первым, вторым и третьим задающим устройствам и с устройством суммирования, подключенным в свою очередь к управляющему устройству привода вентилятора, в программу работы которого заложен алгоритм работы комбинированного релейного шестипозиционного микропроцессорного регулятора температуры.
| СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРНОГО РЕЖИМА РАБОТЫ ДВИГАТЕЛЯ И ТРАНСМИССИИ | 2004 |
|
RU2272160C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ОХЛАЖДАЮЩЕЙ СРЕДЫ ТЕПЛОВОЙ МАШИНЫ | 2003 |
|
RU2264544C2 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2426895C1 |
| US 5298842 A, 29.03.1994 | |||
| ПАРОФАЗНЫЕ ИНГИБИТОРЫ КОРРОЗИИ И СПОСОБ ИХ ПОЛУЧЕНИЯ | 2008 |
|
RU2453632C2 |

