Техническое решение относится к радионавигации, а именно к способам определения местоположения подвижных объектов.
Известен угломерно-дальномерный способ определения координат цели в радиолокационных системах с активным ответом (см., например, Теоретические основы радиолокации. Под ред. В.Е.Дулевича. - М.: Советское радио, 1978, с.7-11), заключающийся в том, что с радиолокационной станции осуществляют ненаправленное излучение запросных радиосигналов, на цели осуществляют прием этих запросных радиосигналов и излучение ответных радиосигналов, на указанной радиолокационной станции осуществляют направленный прием ответных радиосигналов, по времени запаздывания и направлению распространения принимаемых ответных радиосигналов определяют дальность до цели и угол между заданным направлением и направлением на цель, по полученным значениям на указанной радиолокационной станции определяют координаты цели.
Указанный способ позволяет с высокой точностью измерять координаты целей при распространении радиоволн в свободном пространстве. Однако при измерении координат удаленных целей способ требует применения на радиолокационных станциях и на целях радиопередающих устройств высокой мощности, что значительно усложняет способ.
Известен способ определения местоположения подвижного объекта (см. патент РФ на изобретение №2195776, бюл. №34 от 10.12.2002. Способ определения местоположения подвижного объекта/ Урецкий Я.С., Купершмидт П.В. и др.), заключающийся в том, что в центрах условных ячеек, представляющих собой равные правильные шестиугольники, плотно покрывающие обслуживаемую территорию, размещают базовые станции с радиусами зон действия, равными длине стороны каждого правильного шестиугольника, и с заданным на каждой из этих базовых станций уникальным идентификационным номером, с позиционируемого подвижного объекта, являющегося одним из подвижных объектов, находящихся в пределах обслуживаемой территории, осуществляют передачу позывных радиосигналов в заданной полосе частот, эти позывные радиосигналы принимают на базовых станциях, в зонах действия которых находится позиционируемый подвижный объект, с этих базовых станций передают информационные сигналы, содержащие идентификационные номера указанных базовых станций, по этим информационным сигналам определяют местоположение позиционируемого подвижного объекта, причем в вершинах указанных правильных шестиугольников размещают дополнительно базовые станции с радиусами зон действия, равными длине стороны каждого правильного шестиугольника и с заданным на каждой из этих базовых станций уникальным идентификационным номером, базовыми станциями, в зонах действия которых находятся подвижные объекты, являются базовые станции, размещаемые в центрах и в вершинах правильных шестиугольников, в зонах действия которых находятся подвижные объекты, передаваемыми информационными сигналами, содержащими идентификационные номера базовых станций, в зонах действия которых находится позиционируемый подвижный объект, являются соответствующие информационные радиосигналы, передачу информационных радиосигналов с указанных базовых станций осуществляют на подвижные объекты, находящиеся в пределах обслуживаемой территории, задают семь полос частот информационных радиосигналов, передаваемых со всех базовых станций, причем эти заданные полосы частот являются неперекрывающимися, из семи заданных полос частот на каждой базовой станции задают одну полосу частот информационных радиосигналов, передаваемых с этой базовой станции, не перекрывающуюся с полосами частот информационных радиосигналов, передаваемых с ближайших базовых станций, из семи заданных полос частот на каждом подвижном объекте задают пять полос частот информационных радиосигналов, принимаемых на этом подвижном объекте, причем эти заданные полосы частот являются неперекрывающимися, на каждой из базовых станций и на подвижных объектах, находящихся в пределах обслуживаемой территории, задают дополнительно координаты размещения всех базовых станций, а также соответствующие им заданные идентификационные номера и радиусы зон действия всех базовых станций, передача информационных радиосигналов с базовых станций, в зонах действия которых находится позиционируемый подвижный объект, на подвижные объекты, находящиеся в пределах обслуживаемой территории, состоит в том, что вначале с одной из этих базовых станций осуществляют излучение информационных радиосигналов в заданной полосе частот, на всех базовых станциях, являющихся ближайшими по отношению к указанной базовой станции, осуществляют прием передаваемых с последней базовой станции информационных радиосигналов и их излучение в соответствующих заданных полосах частот, затем на всех других базовых станциях, являющихся ближайшими по отношению к указанным базовым станциям, осуществляют прием передаваемых с указанных базовых станций информационных радиосигналов и их излучение в соответствующих заданных полосах частот, затем таким же образом последовательно, по всем направлениям от указанной базовой станции, в зоне действия которой находится позиционируемый подвижный объект, к границам обслуживаемой территории на всех других последующих базовых станциях, являющихся ближайшими по отношению к предыдущим базовым станциям, осуществляют прием передаваемых с предыдущих базовых станций информационных радиосигналов и их излучение в соответствующих заданных полосах частот, затем осуществляют аналогичным образом поочередно передачу информационных радиосигналов со всех других базовых станций, в зонах действия которых находится позиционируемый подвижный объект, на подвижные объекты, находящиеся в пределах обслуживаемой территории, при этом излучение информационных радиосигналов в заданной полосе частот с каждой базовой станции, кроме базовой станции, идентификационный номер которой содержится в передаваемых информационных радиосигналах, осуществляют при приеме на этой базовой станции информационных радиосигналов одной из заданных на этой базовой станции полос частот, на подвижных объектах, находящихся в пределах обслуживаемой территории, осуществляют в заданных полосах частот прием информационных радиосигналов, передаваемых с каждой из базовых станций, в зонах действия которых находится позиционируемый подвижный объект, определение местоположения позиционируемого подвижного объекта осуществляют на подвижных объектах, находящихся в пределах обслуживаемой территории, и на базовых станциях по идентификационным номерам базовых станций, в зонах действия которых находится позиционируемый подвижный объект, а также по дополнительно заданным координатам размещения и радиусам зон действия этих базовых станций.
Указанный способ позволяет при определении местоположения подвижного объекта использовать маломощные радиосигналы, однако требует задания на каждой базовой станции полосы частот передаваемых с этой базовой станции радиосигналов, являющейся одной из семи заданных полос частот радиосигналов, передаваемых со всех базовых станций, и не перекрывающейся с полосой частот радиосигналов, передаваемых с ближайших базовых станций. В связи с этим введение дополнительных базовых станций, осуществляемое, например, с целью уменьшения мощности излучаемых радиосигналов, требует трудоемкого перезадания полос частот радиосигналов, передаваемых с каждой базовой станции, что усложняет способ. Кроме того, способ требует задания на каждой базовой станции координат размещения всех базовых станций и соответствующих им идентификационных номеров, что также усложняет способ.
Решаемой технической задачей является упрощение способа на основе определения местоположения подвижного объекта по заданной длительности радиосигналов, передаваемых с базовых станций, и моментам времени приема радиосигналов на опорных станциях.
Решение технической задачи в способе определения местоположения подвижного объекта, заключающемся в том, что размещают базовые станции с заданными дальностями действия, передают радиосигналы с подвижного объекта, которые принимают на первых базовых станциях, являющихся базовыми станциями, в пределах дальностей действия которых находится подвижный объект, передают с первых базовых станций радиосигналы, принимают радиосигналы, передаваемые с первых базовых станций, на вторых базовых станциях, расположенных в пределах дальностей действия первых базовых станций, и передают радиосигналы со вторых базовых станций, затем таким же образом последовательно, по всем направлениям от первых базовых станций принимают радиосигналы, передаваемые с (k-1)-х базовых станций, на всех k-x базовых станциях, расположенных в пределах дальностей действия (k-1)-х базовых станций, причем k-e базовые станции не являются (k-2)-ми базовыми станциями, где k=3, 4,..., K - положительные целые числа, и передают радиосигналы с k-x базовых станций, передают с опорных станций, являющихся выбранными из указанных выше базовых станций, сигналы на объект, на котором определяют местоположение подвижного объекта по заданным дальностям действия базовых станций и по информации, содержащейся в сигналах, переданных с опорных станций, достигается тем, что размещение базовых станций осуществляют со случайным разбросом около вершин условных ячеек, представляющих собой равные правильные многоугольники, плотно примыкающие друг к другу своими сторонами, плотно покрывающие обслуживаемую территорию, с заданными математическим ожиданием и дисперсией расстояния между ближайшими базовыми станциями, передачу радиосигналов со вторых базовых станций осуществляют по окончании приема радиосигналов, передаваемых с первых базовых станций, передачу радиосигналов с k-x базовых станций осуществляют по окончании приема радиосигналов, передаваемых с (k-1)-х базовых станций, где k=3, 4,..., K - положительные целые числа, сигналы, передаваемые с каждой опорной станции на объект, содержат информацию о времени приема радиосигналов, принимаемых на данной опорной станции, определение местоположения подвижного объекта осуществляют также по заданным координатам опорных станций, по заданным математическому ожиданию и дисперсии расстояния между ближайшими базовыми станциями и по заданной длительности радиосигналов, передаваемых с базовых станций, причем определение местоположения подвижного объекта состоит в том, что определяют для каждой пары опорных станций множество оценок координат базовых станций, для которых вероятность события, состоящего в том, что в пределах дальностей действия хотя бы одной из них находится подвижный объект, не менее заданной величины, по которым определяют для всех опорных станций множество оценок координат базовых станций, для которых вероятность события, состоящего в том, что в пределах дальностей их действия находится подвижный объект, не менее заданной величины, по которым определяют местоположение подвижного объекта.
При этом радиосигналы, передаваемые с n-й базовой станции, где n=1, 2,..., N - положительные целые числа, N - число базовых станций, представляют собой сумму радиосигналов, передаваемых в М заданных неперекрывающихся полосах частот, где М>log2N, причем мощность радиосигнала, передаваемого в m-й полосе частот, где m=1, 2,..., М - положительные целые числа, определяют по n.
Термин «подвижный объект» является общепринятым (см., например, Соловьев Ю.А. Системы спутниковой навигации. - М.: Эко-трендз, 2000, с.47). К подвижным объектам относят, в частности, различные автотранспортные средства, оснащенные приемопередающей аппаратурой.
Термины «базовая станция» и «опорная станция» также являются общепринятыми (см., например, соответственно Громаков Ю.А. Стандарты и системы подвижной радиосвязи. - М.: Эко-Трендз, 2000, с.87-154; Авиационная радионавигация: Справочник/ Под ред. А.А. Сосновского. - М.: Транспорт, 1990, с.43). К базовым и опорным станциям относят, в частности, стационарно расположенные объекты, оснащенные приемопередающей аппаратурой.
На фиг.1. изображены три группы равных правильных фигур, плотно примыкающих друг к другу своими сторонами, плотно покрывающих плоскость, для случая, при котором число правильных треугольников равно шести, число квадратов равно четырем, число правильных шестиугольников равно трем.
На фиг.2 изображены условно базовые станции, размещенные со случайным разбросом около вершин условных ячеек, представляющих равные квадраты, плотно примыкающие друг к другу своими сторонами, плотно покрывающие обслуживаемую территорию, и подвижный объект с указанием направлений передачи радиосигналов для случая, при котором число базовых станций равно шестидесяти. На фиг.2 изображены также зоны действия четырех базовых станций, при этом центры этих зон действия смещены в вершины условных ячеек, представляющих равные квадраты, плотно примыкающие друг к другу своими сторонами, плотно покрывающие обслуживаемую территорию, около которых размещены со случайным разбросом соответствующие базовые станции.
На фиг.3 изображены условно временные диаграммы передачи радиосигналов с подвижного объекта, с первых базовых станций, со вторых базовых станций и с третьих базовых станций.
На фиг.4 изображены условно спектры радиосигналов, переданных с двух ближайших k-x базовых станций, расположенных в пределах дальности действия одной из (k+1)-х базовых станций, и спектр на входе данной базовой станции для случая, при котором указанным k-м базовым станциям соответствуют значения n=17 и n=28.
На фиг.5 изображена система для осуществления способа, содержащая приемопередатчики, размещенные по одному на каждой базовой станции, и передатчик, размещенный на подвижном объекте, для случая, при котором число базовых станций равно пятнадцати.
На фиг.6 изображен приемопередатчик.
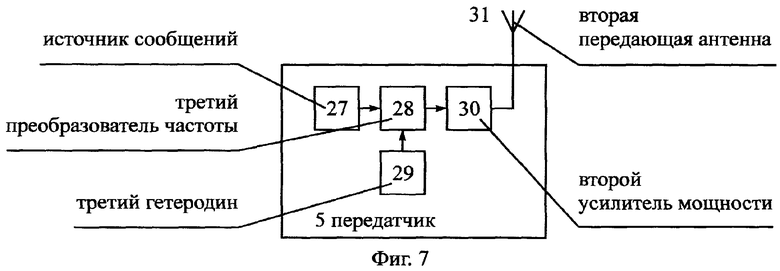
На фиг.7 изображен передатчик.
Система для осуществления способа, представленная на фиг.5-7, содержит размещенные по одному на каждой из N базовых станций 1 и на каждой опорной станции 2, являющейся выбранной из числа базовых станций 1, приемопередатчики 3 и размещенный на подвижном объекте 4 передатчик 5, причем каждый приемопередатчик 3 содержит приемную антенну 6, первый полосовой фильтр 7, малошумящий усилитель 8, первый преобразователь 9 частоты, первый гетеродин 10, каждый приемопередатчик 3 содержит также М каналов 11 обработки, причем М>log2N, каждый из которых содержит второй полосовой фильтр 12, демодулятор 13, блок 14 возведения в квадрат, интегратор 15, аналого-цифровой преобразователь 16, каждый приемопередатчик 3 содержит также микроконтроллер 17, блок 18 памяти, блок 19 задания, М модуляторов 20, каждый из которых содержит второй преобразователь 21 частоты, второй гетеродин 22, аналоговый коммутатор 23, каждый приемопередатчик 3 содержит также сумматор 24, первый усилитель 25 мощности, первую передающую антенну 26, передатчик 5 содержит источник 27 сообщений, третий преобразователь 28 частоты, третий гетеродин 29, второй усилитель 30 мощности, вторую передающую антенну 31.
В каждом приемопередатчике 3 выход приемной антенны 6 соединен с входом первого полосового фильтра 7, выход которого соединен с входом малошумящего усилителя 8, выход которого соединен с первым входом первого преобразователя 9 частоты, второй вход которого соединен с выходом первого гетеродина 10, выход первого преобразователя 9 частоты соединен с входами вторых полосовых фильтров 12 каналов 11 обработки, в каждом из которых выход второго полосового фильтра 12 соединен с входом демодулятора 13 и с входом блока 14 возведения в квадрат, выход которого соединен с входом интегратора 15, выход которого соединен с входом аналого-цифрового преобразователя 16, соответствующие выходы аналого-цифровых преобразователей 16 соединены с соответствующими входами микроконтроллера 17, выходы демодуляторов 13 соединены с соответствующими входами микроконтроллера 17, выходы которого соединены с соответствующими первыми входами вторых преобразователей 21 частоты модуляторов 20, в каждом из которых второй вход второго преобразователя 21 частоты соединен с выходом второго гетеродина 22, выход второго преобразователя 21 частоты соединен с коммутируемым входом аналогового коммутатора 23, управляющие входы аналоговых коммутаторов 23 соединены с соответствующими выходами микроконтроллера 17, выходы аналоговых коммутаторов 23 соединены с соответствующими входами сумматора 24, выход которого соединен с входом первого усилителя 25 мощности, выход которого соединен с входом первой передающей антенны 26, соответствующие входы микроконтроллера 17 соединены с соответствующими выходами блока 18 памяти и блока 19 задания, в передатчике 5 источник 27 сообщений соединен с первым входом третьего преобразователя 28 частоты, второй вход которого соединен с выходом третьего гетеродина 29, выход третьего преобразователя 28 частоты соединен с входом второго усилителя 30 мощности, выход которого соединен с входом второй передающей антенны 31.
Базовые станции 1 размещены с заданными математическим ожиданием и дисперсией расстояния между ближайшими базовыми станциями 1.
Дальности действия базовых станций 1 заданы по заданным математическому ожиданию и дисперсии расстояния между ближайшими базовыми станциями 1.
Частоты настройки вторых гетеродинов 22 совпадают с соответствующими центральными значениями заданных полос частот передачи базовых станций 1 и подвижного объекта 4, причем заданные полосы частот передачи являются неперекрывающимися. Полосы пропускания соответствующих первых полосовых фильтров 7 совпадают с соответствующими заданными полосами частот передачи, смещенными по оси частот вниз на частоту настройки первого гетеродина 10.
Сущность способа заключается в следующем.
Размещают базовые станции 1 с заданными дальностями действия и с заданными математическим ожиданием и дисперсией расстояния между ближайшими базовыми станциями 1.
В ряде задач базовые станции 1 размещают на обслуживаемой территории со случайным разбросом около заданных точек. (Такая ситуация возникает, например, при сбросе базовых станций 1 с летательного аппарата, когда в результате воздействия множества случайных факторов точки падения базовых станций 1 невозможно точно рассчитать.) При этом расстояние между ближайшими базовыми станциями 1 является случайной величиной, которую целесообразно характеризовать математическим ожиданием и дисперсией.
Базовая станция 1 является ближайшей по отношению к данной базовой станции 1, если расстояние между ними не больше расстояния между данной базовой станцией 1 и любой другой базовой станцией 1. Следовательно, несколько базовых станций 1 могут являться ближайшими по отношению к данной базовой станции 1, если расстояния между каждой из них и данной базовой станцией 1 примерно равны между собой и не больше расстояния между данной базовой станцией 1 и любой другой базовой станцией 1.
Размещают базовые станции 1 с заданными дальностями действия и с заданными математическим ожиданием и дисперсией расстояния между ближайшими базовыми станциями 1.
В ряде задач базовые станции 1 размещают на обслуживаемой территории со случайным разбросом около заданных точек. (Такая ситуация возникает, например, при сбросе базовых станций 1 с летательного аппарата, когда в результате воздействия множества случайных факторов точки падения базовых станций 1 невозможно точно рассчитать.) При этом расстояние между ближайшими базовыми станциями 1 является случайной величиной, которую целесообразно характеризовать математическим ожиданием и дисперсией.
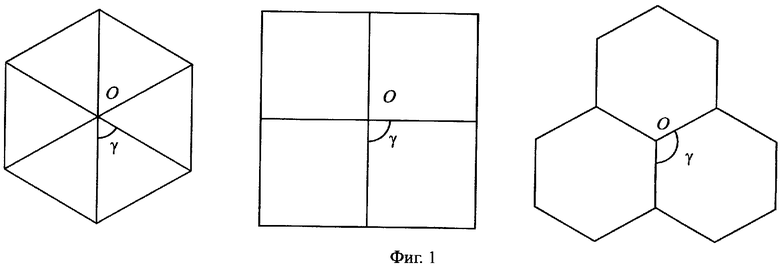
В том случае, если обслуживаемая территория представляет собой плоскость, равными правильными многоугольниками, плотно примыкающими друг к другу своими сторонами, плотно покрывающими обслуживаемую территорию, могут являться только правильные треугольники, прямоугольники (квадраты) и шестиугольники, что обусловлено следующим.
Величина внутреннего угла γ (фиг.1) равна (см. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся вузов. - М.: Наука, 1980, с.287)
где q - число сторон многоугольника.
При плотном размещении на плоскости равных правильных многоугольников каждая вершина, например О (фиг.1), является общей для р многоугольников, причем р - целое число, не меньшее трех и равное
Этим условиям удовлетворяют только три значения q={3,4,6}, что и требовалось показать.
Размещение базовых станций 1 (фиг.1) в вершинах условных ячеек, представляющих собой равные правильные треугольники, плотно примыкающие друг к другу своими сторонами, плотно покрывающие обслуживаемую территорию, эквивалентно размещению базовых станций 1 в центрах и в вершинах условных ячеек, представляющих собой равные правильные шестиугольники, плотно примыкающие друг к другу своими сторонами, плотно покрывающие обслуживаемую территорию (см. патент РФ на изобретение №2195776, бюл. №34 от 10.12.2002. Способ определения местоположения подвижного объекта/Урецкий Я.С., Купершмидт П.В. и др.).
Дальностью действия базовой станции 1 при ненаправленной передаче с нее радиосигналов мощности Рпрд является расстояние, в пределах которого мощность этих радиосигналов при их ненаправленном приеме на других базовых станциях 1 не меньше пороговой величины Pпр.мин.
Дальностью действия базовой станции 1 при ненаправленном приеме на ней радиосигналов является расстояние, в пределах которого мощность этих радиосигналов, создаваемая при ненаправленной передаче с других базовых станций 1 и с подвижного объекта 4 радиосигналов мощности Р, не меньше пороговой величины Pпр.мин.
Если соответствующие значения мощности Рпрд передаваемых радиосигналов и пороговые значения мощности Рпр.мин принимаемых радиосигналов в обоих случаях равны, то дальности действия базовой станции 1 при передаче и приеме радиосигналов совпадают и при условии распространения электромагнитных волн в свободном пространстве равны (см., например, Теоретические основы радиолокации. Под ред. В.Е.Дулевича. - М.: Советское радио, 1978, с.402)

где с - скорость света в вакууме; f - рабочая частота.
Под дальностью R действия базовых станций 1 понимаем равные между собой дальности действия при передаче и при приеме радиосигналов.
При ненаправленном приеме и ненаправленной передаче радиосигналов в условиях свободного пространства дальность R действия определяет круговую зону действия базовой станции 1 с центром в точке размещения данной базовой станции 1 и радиусом R.
Дальности R действия базовых станций 1 задают по заданным математическому ожиданию md и дисперсии Dd расстояния d между ближайшими базовыми станциями 1.
При равномерной плотности ƒ(d) распределения случайной величины d на отрезке  (см., например, Справочник по теории вероятностей и математической статистике. - М.: Наука. Главная редакция физико-математической литературы, 1985, с.116, 117):
(см., например, Справочник по теории вероятностей и математической статистике. - М.: Наука. Главная редакция физико-математической литературы, 1985, с.116, 117):

причем

величину R задают по формуле

Условиям (4)-(6), в частности, удовлетворяют соотношения md=300 м; Dd=75 м2; R=315 м.
Тогда при выполнении условий (4)-(6) достоверным является событие, состоящее в том, что число базовых станций 1, расположенных в пределах дальности R действия каждой базовой станции 1, не превышает p, определяемого формулой (2).
В случае размещения базовых станций 1 (фиг.1) со случайным разбросом около вершин условных ячеек, представляющих собой равные квадраты, плотно примыкающие друг к другу своими сторонами, плотно покрывающие обслуживаемую территорию, и при выполнении условий (4)-(6) достоверным является событие, состоящее в том, что в пределах дальности R действия каждой базовой станции 1 находится четыре базовых станции 1.
Передают радиосигналы с подвижного объекта 4, которые принимают на первых базовых станциях 1, являющихся базовыми станциями 1, в пределах дальностей R действия которых находится подвижный объект 4.
При выполнении условий (4)-(6) достоверным является событие, состоящее в том, что число первых базовых станций 1 не превышает четыре. На фиг.2 показан случай, при котором первыми базовыми станциями 1 являются базовые станции 134, 135, 144 и 145.
Передают с первых базовых станций 1 радиосигналы. Принимают радиосигналы, передаваемые с первых базовых станций 1, на вторых базовых станциях 1, расположенных в пределах дальностей R действия первых базовых станций 1, и по окончании их приема передают радиосигналы со вторых базовых станций 1. Затем таким же образом последовательно, по всем направлениям от первых базовых станций 1 принимают радиосигналы, передаваемые с (k-1)-x базовых станций, на всех k-x базовых станциях 1, расположенных в пределах дальностей R действия (k-1)-х базовых станций 1, причем k-e базовые станции 1 не являются (k-2)-ми базовыми станциями 1, где k=3, 4,..., K - положительные целые числа, и по окончании их приема передают радиосигналы с k -х базовых станций 1.
В соответствии с фиг.2, вторыми базовыми станциями 1 являются базовые станции 124, 125, 136, 146, 155, 154, 143, 133; третьими (k=3) базовыми станциями 1 являются базовые станции 114, 115, 126, 137, 147, 156, 153, 142, 132, 123; четвертыми (k=4) базовыми станциями 1 являются базовые станции 14, 15, 116, 127, 138, 148, 157, 152, 141, 131, 122, 113; пятыми (k=5) базовыми станциями 1 являются базовые станции 16, 117, 128, 139, 149, 158, 151, 121, 112, 13; шестыми (k=6) базовыми станциями 1 являются базовые станции 17, 118, 129, 140, 150, 159, 111, 12; седьмыми (k=7) базовыми станциями 1 являются базовые станции 18, 119, 130, 160, 11; восьмыми (k=8) базовыми станциями 1 являются базовые станции 19, 120, девятой (k=9) базовой станцией 1 является базовая станция 110 (на фиг.2 соответствующие базовые станции 1 охвачены пунктирными линиями).
Передачу радиосигналов с подвижного объекта 4 и с первых базовых станций 1 можно осуществлять в одной заданной полосе частот Δƒ в том случае, если передачу радиосигналов с первых базовых станций 1 осуществлять после окончания приема радиосигналов, передаваемых с подвижного объекта 4 (для этого, в частности, в радиосигналы, передаваемые с подвижного объекта 4, необходимо вводить информацию о том, что их источником является подвижный объект 4). При этом передачу радиосигналов со всех базовых станций 1 можно осуществлять в той же заданной полосе частот Δƒ, поскольку передачу радиосигналов со вторых базовых станций 1 осуществляют по окончании приема радиосигналов с первых базовых станций 1; передачу радиосигналов с k-x базовых станций 1 осуществляют по окончании приема радиосигналов, передаваемых с (k-1)-x базовых станций 1, где k=3, 4,..., K - положительные целые числа.
Число К зависит от размеров обслуживаемой территории, числа N и особенностей размещения базовых станций 1. Для случая размещения базовых станций 1, приведенного на фиг.2, число К=14.
Направления передачи радиосигналов показаны на фиг.2 стрелками. Передача радиосигналов без зацикливания обеспечивается тем, что на первых базовых станциях 1 блокируют прием на время передачи радиосигналов с первых базовых станций 1 и со вторых базовых станций 1; на вторых базовых станциях 1 блокируют прием на время передачи радиосигналов со вторых базовых станций 1 и с третьих базовых станций 1; на k-x базовых станциях 1 блокируют прием на время передачи радиосигналов с k-x базовых станций 1 и с (k+1)-x базовых станций 1, где k=3, 4,..., К - положительные целые числа.
Временные диаграммы последовательной передачи радиосигналов от первых базовых станций 1 к границам обслуживаемой территории приведены на фиг.3. Здесь Спо, C1, С2 и С3 - радиосигналы, передаваемые с подвижного объекта 4, с первых базовых станций 1, со вторых базовых станций 1 и с третьих базовых станций 1 соответственно; τ - время распространения радиосигналов между ближайшими базовыми станциями 1, определяемое расстоянием d между ними.
Скорость перемещения подвижного объекта 4 полагаем настолько малой, что изменением местоположения подвижного объекта 4, которое происходит за время передачи радиосигналов от первых базовых станций 1 до границ обслуживаемой территории, и возникающим эффектом Доплера можно пренебречь.
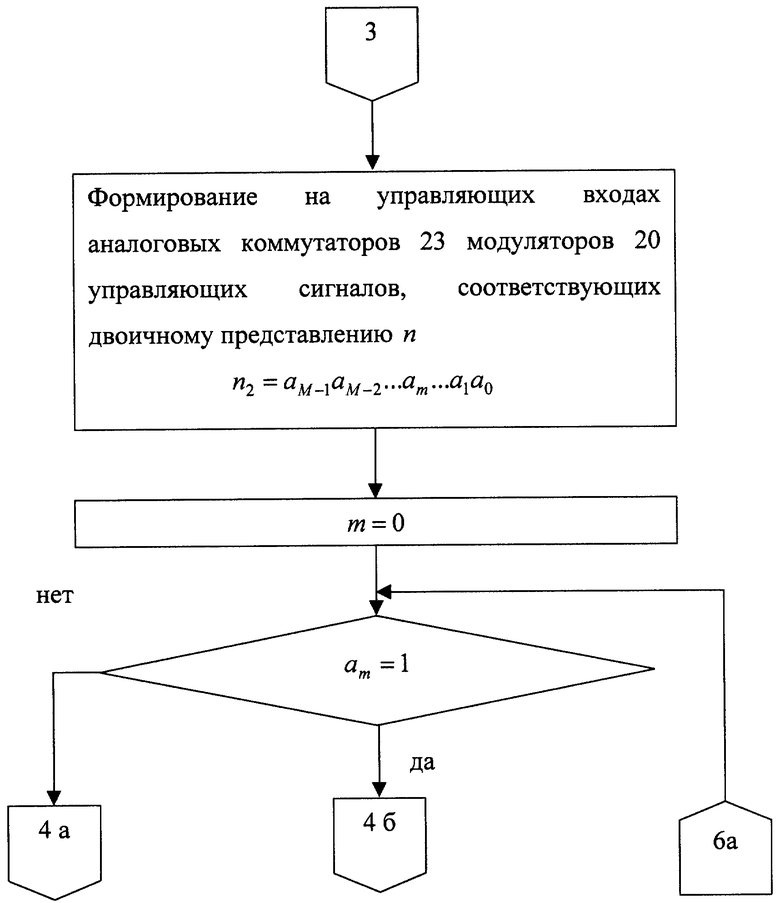
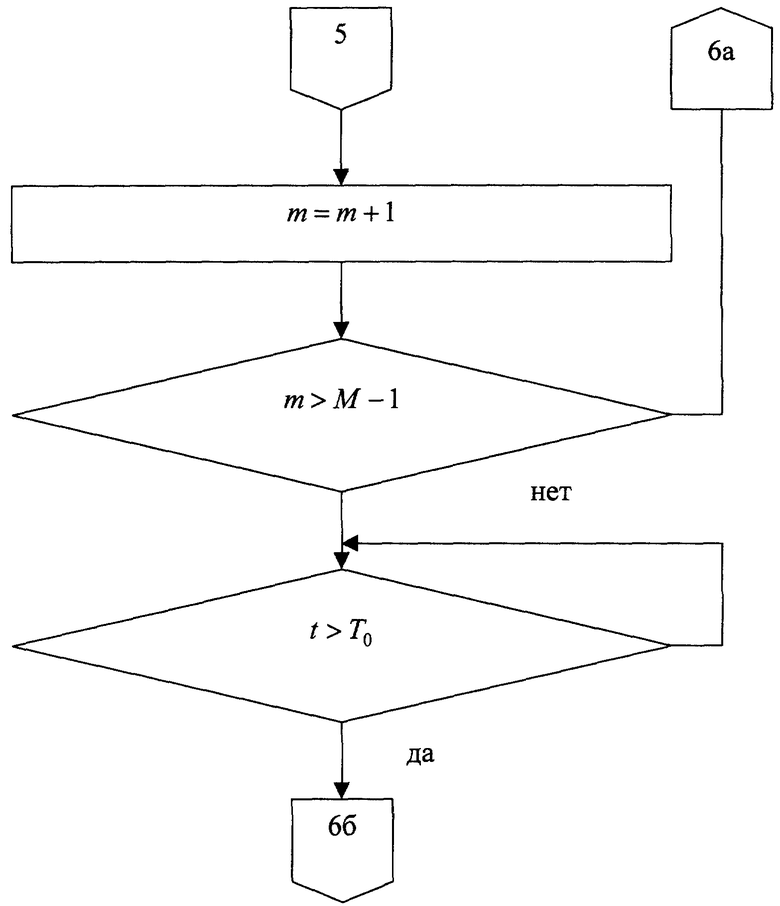
Передача с двух ближайших k-x базовых станций 1 радиосигналов в одной и той же заданной полосе частот Δƒ и с равными значениями мощности может вызывать замирания при приеме этих радиосигналов на (k+1)-й базовой станции 1, в пределах дальности R действия которой расположены эти базовые станции 1, где k=1, 2,..., K - положительные целые числа. Устранение замираний достигается тем, что радиосигналы, передаваемые в заданной полосе частот Δƒ с n-й базовой станции 1, где n=1, 2,..., N - положительные целые числа, N - число базовых станций 1, представляют собой сумму радиосигналов, передаваемых в М заданных неперекрывающихся полосах частот, где M>log2N, причем мощность радиосигнала, передаваемого в m-й заданной полосе частот, где m=1, 2,..., М - положительные целые числа, определяют по n.
Любое n из N преобразуют в М-разрядный двоичный код:

где am=1 или 0 в соответствии с разложением

При этом m-му разряду двоичного кода n2 соответствует m-я заданная полоса частот Δƒm в заданной полосе частот Δƒ, где m=1, 2,..., М, k=1, 2,..., K - положительные целые числа, и мощность Pm прд передаваемого в m-й заданной полосе частот радиосигнала. Заданные полосы частот Δƒm получают, например, разбиением заданной полосы частот Δƒ на М равных по протяженности и прилегающих друг к другу частотных интервалов.
Величину Рm прд можно определить по формуле

где Рпрд - заданное значение мощности передаваемого радиосигнала, соответствующее заданной дальности R действия базовой станции 1;
b≪1 - заданная неотрицательная величина, например, b=0.
Чтобы исключить двоичную комбинацию, содержащую одни нули, необходимо выполнить условие

При выполнении условий (4)-(6) достоверным является событие, состоящее в том, что на входе каждой (k+1)-й базовой станции 1 (фиг.2) присутствует одновременно не более двух радиосигналов, передаваемых в заданной полосе частот Δƒ с двух k-x базовых станций 1, расположенных в пределах дальности R действия данной (k+1)-й базовой станции 1. Тогда с учетом того, что различным n соответствуют различные двоичные комбинации, достоверным является событие, состоящее в том, что найдется некоторая m-я полоса частот Δƒm, в которой указанные k-e базовые станции 1 передают радиосигналы, существенно различающиеся по мощности, а следовательно, замирания в данной m-й полосе частот будут отсутствовать.
Например, на входе базовой станции 118 (фиг.2) действуют радиосигналы, передаваемые с базовых станций 117 и 128 в заданной полосе частот Δƒ. При N=60 log2 N=5,91, откуда М=6. Тогда базовым станциям 117 и 128 соответствуют двоичные номера 010001 и 011100. Спектры радиосигналов, передаваемых с базовых станций 117 и 128, и радиосигнала, действующего на входе базовой станции 118, условно изображены на фиг.4 (спектр радиосигнала, действующего на входе базовой станции 118 приведен без учета ослабления; пунктиром изображен спектр в полосе частот, в которой возможны замирания).
При размещении базовых станций 1 со случайным разбросом около вершин условных ячеек, представляющих собой равные правильные треугольники, плотно примыкающие друг к другу своими сторонами, плотно покрывающие обслуживаемую территорию, или около вершин условных ячеек, представляющих собой равные правильные шестиугольники, плотно примыкающие друг к другу своими сторонами, плотно покрывающие обслуживаемую территорию, и при выполнении условий (4)-(6) достоверным является событие, состоящее в том, что на входе каждой (k+1)-й базовой станции 1 также присутствует одновременно не более двух радиосигналов, передаваемых с двух k-x базовых станций 1, расположенных в пределах дальности R действия данной (k+1)-й базовой станции 1 (см., например, патенты РФ на изобретения №2195776 и №2195777, бюл. №34 от 10.12.2002. Способ определения местоположения подвижного объекта/Урецкий Я.С., Купершмидт П.В. и др.), а следовательно, замирания в соответствующих полосах частот также будут отсутствовать.
Определение местоположения подвижного объекта 4 осуществляют по заданным координатам опорных станций 2, являющихся выбранными из числа базовых станций 1, по заданным дальностям R действия базовых станций 1, по заданным математическому ожиданию md и дисперсии Dd расстояния d между ближайшими базовыми станциями 1, а также по заданной длительности радиосигналов, передаваемых с базовых станций, и моментам времени приема радиосигналов на опорных станциях 2.
Определение местоположения подвижного объекта 4 состоит в следующем.
Для каждой пары r-й и s-й опорных станций 2 по их заданным координатам (хr, уr) и (xs, ys), где r, s=1, 2,..., S - положительные целые числа; S - число опорных станций 2, дальностям R действия базовых станций 1, по заданным математическому ожиданию md и дисперсии Dd расстояния d между ближайшими базовыми станциями 1, а также по заданной длительности Т радиосигналов, передаваемых с базовых станций 1, и по моментам времени tr и ts приема радиосигналов на данных опорных станциях 2 определяют множество  оценок координат базовых станций 1, для которых достоверным является событие, состоящее в том, что в пределах дальностей R действия хотя бы одной из них находится подвижный объект 4, где n=1, 2,..., N - положительные целые числа.
оценок координат базовых станций 1, для которых достоверным является событие, состоящее в том, что в пределах дальностей R действия хотя бы одной из них находится подвижный объект 4, где n=1, 2,..., N - положительные целые числа.
Выбор опорных станций 2 из числа базовых станций 1 и разбиение опорных станций 2 по парам необходимо осуществлять из условий требуемой точности и однозначности измерений координат подвижного объекта 4.
В случае размещения базовых станций 1 (фиг.2) со случайным разбросом около вершин условных ячеек, представляющих собой равные квадраты, плотно примыкающие друг к другу своими сторонами, плотно покрывающие обслуживаемую территорию, при выполнении условий (4)-(6), а также при использовании прямолинейной системы координат, связанной с одной из точек обслуживаемой территории и ориентированной осями вдоль соответствующих сторон указанных
квадратов, оценок координат  базовых станций 1, принадлежащие множеству
базовых станций 1, принадлежащие множеству  определяют из условия
определяют из условия

где  - приведенные координаты r-й и s-й опорных станций 2, удовлетворяющие условиям
- приведенные координаты r-й и s-й опорных станций 2, удовлетворяющие условиям
В выражении (11)
где τ - время распространения радиосигналов между ближайшими базовыми станциями 1.
Формула (14) не учитывает задержки сигналов в приемопередающих трактах базовых станций 1.
При одном и том же способе измерения времени приема радиосигналов на опорных станциях 2 (например, по началу радиосигнала) величина krs является целым числом. Кроме того, если при передаче радиосигналов с подвижного объекта 4 r-я опорная станция 2 является kr-й базовой станцией 1, а s-я опорная станция 2 - ks-й базовой станцией 1, то

Выражения (11) и (14) характеризуют определение местоположения подвижного объекта 4 на основе измерения разностей моментов времени tr и ts приема радиосигналов на опорных станциях 2. Вместе с тем аналогичные результаты можно получить и при измерении сумм моментов времени tr и ts приема радиосигналов на опорных станциях 2 путем замены знаков минус на плюс в выражения (11) и (14).
Из формул (14) и (15) следует, что отсчет времени на r-й и s-й опорных станциях 2 можно вести независимо.
Затем формируют множество  как пересечение всех множеств
как пересечение всех множеств  оценок координат базовых станций 1, для которых достоверным является событие, состоящее в том, что в пределах дальностей R их действия находится подвижный объект 4, где n=1, 2,..., N - положительные целые числа:
оценок координат базовых станций 1, для которых достоверным является событие, состоящее в том, что в пределах дальностей R их действия находится подвижный объект 4, где n=1, 2,..., N - положительные целые числа:

Оценки координат  подвижного объекта 4 получают как координаты точек обслуживаемой территории, находящихся в пределах дальностей R действия базовых станций 1, оценки координат которых принадлежат множеству
подвижного объекта 4 получают как координаты точек обслуживаемой территории, находящихся в пределах дальностей R действия базовых станций 1, оценки координат которых принадлежат множеству 
При круговых зонах действия базовых станций 1 радиусом R оценки координат подвижного объекта 4 можно получить из решения системы неравенств:

где  - оценки координат базовых станций 1, принадлежащие множеству 3.
- оценки координат базовых станций 1, принадлежащие множеству 3.
Термин «оценка» является общепринятым (см., например, Е.С.Вентцель. Теория вероятностей. - М.: Наука. Главная редакция физико-математической литературы, 1969, с.313; Радиотехнические системы. Под ред. Ю.М.Казаринова. - М.: Высшая школа, 1990, с.77, 448-469) и означает приближенное значение, результат измерения случайной величины.
Выражения (11)-(17) основаны на том, что в качестве оценок координат всех базовых станций 1 (за исключением базовых станций 1, являющихся опорными станциями 2) и приведенных координат опорных станций 2 принимают координаты вершин условных ячеек, представляющих собой равные правильные многоугольники (в данном случае квадраты), плотно примыкающие друг к другу своими сторонами, плотно покрывающие обслуживаемую территорию, около которых размещены со случайным разбросом соответствующие базовые станции 1 и опорные станции 2.
Рассмотрим пример определения местоположения подвижного объекта 4, при котором используются всего две пары опорных станций 2, причем первую пару опорных станций 2 образуют базовые станции 151 и 160 (соответственно опорные станции 21 и 22), вторую пару - базовые станции 160 и 110 (соответственно опорные станции 22 и 23), а подвижный объект 4 занимает положение в соответствии с фиг.2.
Как видно из фиг.2, множество  оценок координат базовых станций 1, для которых достоверным является событие, состоящее в том, что в пределах дальностей R действия хотя бы одной из них находится подвижный объект 4, определяемое для первой пары опорных станций 21 и 22, включает согласно выражениям (11)-(15) оценки координат базовых станций 114, 124, 134, 144, 154, 115, 115, 135, 145, 155 (на фиг.2 эти базовые станции 1 образуют прямоугольник с вершинами 114, 115, 155, 154). В данном случае k12=2, так как базовая станция 151(опорная станция 21) является пятой (k1=5) базовой станцией 1, а базовая станция 160 (опорная станция 22) - седьмой (k1=7) базовой станцией 1.
оценок координат базовых станций 1, для которых достоверным является событие, состоящее в том, что в пределах дальностей R действия хотя бы одной из них находится подвижный объект 4, определяемое для первой пары опорных станций 21 и 22, включает согласно выражениям (11)-(15) оценки координат базовых станций 114, 124, 134, 144, 154, 115, 115, 135, 145, 155 (на фиг.2 эти базовые станции 1 образуют прямоугольник с вершинами 114, 115, 155, 154). В данном случае k12=2, так как базовая станция 151(опорная станция 21) является пятой (k1=5) базовой станцией 1, а базовая станция 160 (опорная станция 22) - седьмой (k1=7) базовой станцией 1.
Аналогично множество  оценок координат базовых станций 1, для которых достоверным является событие, состоящее в том, что в пределах дальностей R действия хотя бы одной из них находится подвижный объект 4, определяемое для второй пары опорных станций 22 и 23, включает согласно выражениям (11)-(15) оценки координат базовых станций 131-150 (на фиг.2 эти базовые станции 1 образуют прямоугольник с вершинами 131, 140, 150, 141). В данном случае k23=2, так как базовая станция 160 (опорная станция 22) является седьмой (k2=7) базовой станцией 1, а базовая станция 110 (опорная станция 23) - девятой (k1=9) базовой станцией 1.
оценок координат базовых станций 1, для которых достоверным является событие, состоящее в том, что в пределах дальностей R действия хотя бы одной из них находится подвижный объект 4, определяемое для второй пары опорных станций 22 и 23, включает согласно выражениям (11)-(15) оценки координат базовых станций 131-150 (на фиг.2 эти базовые станции 1 образуют прямоугольник с вершинами 131, 140, 150, 141). В данном случае k23=2, так как базовая станция 160 (опорная станция 22) является седьмой (k2=7) базовой станцией 1, а базовая станция 110 (опорная станция 23) - девятой (k1=9) базовой станцией 1.
Множеству  оценок координат базовых станций 1 согласно формуле (16) принадлежат оценки координат базовых станций 134, 135, 144 и 145.
оценок координат базовых станций 1 согласно формуле (16) принадлежат оценки координат базовых станций 134, 135, 144 и 145.
Оценки координат подвижного объекта 4 согласно формуле (17) можно получить из решения системы неравенств:
где  - найденные ранее оценки координат базовых станций 134, 135, 144 и 145.
- найденные ранее оценки координат базовых станций 134, 135, 144 и 145.
Решением системы неравенств (18) является область, выделенная на фиг.2 штриховкой.
При размещении базовых станций 1 со случайным разбросом около вершин условных ячеек, представляющих собой равные правильные треугольники, плотно примыкающие друг к другу своими сторонами, плотно покрывающие обслуживаемую территорию, или около вершин условных ячеек, представляющих собой равные правильные шестиугольники, плотно примыкающие друг к другу своими сторонами, плотно покрывающие обслуживаемую территорию, множества оценок координат базовых станций 1 формируют аналогичным образом с учетом соответствующей модификации выражений (11)-(14).
На фиг.5 приведен пример системы для случая, при котором число базовых станций 1 равно пятнадцати. При этом описание работы системы при осуществлении способа приведено также с учетом фиг.2-4.
Все элементы и блоки, входящие в состав системы, представленной на фиг.5-7, являются известными и описанными в литературе.
Приемная антенна 6, первая передающая антенна 26 и вторая передающая антенна 31 являются ненаправленными.
В качестве микроконтроллера 17 могут использоваться микропроцессорные системы с аналоговыми и цифровыми входами и выходами, в состав которых входят тактовый генератор, запоминающие устройства, аналого-цифровые и цифроаналоговые преобразователи и другие устройства (см., например, П.Хоровиц, У.Хилл. Искусство схемотехники. - М.: Мир, 1993, с.294-295), не изображенные на фиг.5-9.
В качестве блока 18 памяти и блока 19 задания могут использоваться какие-либо известные и описанные в литературе цифровые устройства ввода-вывода данных (см., например, Шевкопляс Б.В. Микропроцессорные структуры. Инженерные решения. - М.: Радио и связь, 1993, с.27).
Время распространения радиосигналов от каждой базовой станции 1 до ближайших базовых станций 1 и интервал времени измерения мощности принимаемых радиосигналов пренебрежимо малы по сравнению с их длительностью; время распространения сигналов в приемопередающих трактах базовых станций 1 пренебрежимо мало.
Рассмотрим осуществление способа с помощью системы, приведенной на фиг.5-7, с учетом фиг.2-4.
Коэффициенты усиления малошумящих усилителей 8 заданы так, чтобы чувствительности приемопередатчиков 3 равнялись Pпр.мин. Коэффициенты усиления первых усилителей 25 мощности и второго усилителя 30 мощности заданы так, чтобы мощности радиосигналов, передаваемых с базовых станций 1 и подвижного объекта 4, равнялись Рпрд. Все используемые в системе радиосигналы являются узкополосными, энергетические спектры которых сосредоточены в области рабочей частоты f. Тогда, с учетом выражения (3), дальности действия приемопередатчиков 3 равны R, причем величина R задана в соответствии с условиями (4)-(6).
В блок 19 задания каждого приемопередатчика 3 вводят неповторяющийся номер n данной базовой станции 1, где n=1, 2,..., N, и число К. В данном случае (фиг.2) N=60, К=14.
В качестве первой пары опорных станций 21 и 22 выбраны соответственно две базовые станции 151 и 160, в качестве второй пары опорных станций 22 и 23 - базовые станции 160 и 110; (фиг.2). В блок 19 задания приемопередатчиков 3 каждой из этих базовых станций 1 вводят также соответствующий номер s (s=1 для опорной станции 21, s=2 для опорной станции 22 и s=3 для опорной станции 23).
В блок 19 задания приемопередатчика 3 одной из базовых станций 1 (например, базовой станции 127), произвольно выбранной в качестве объекта, на котором определяют местоположение подвижного объекта 4 (определяют оценки координат подвижного объекта 4), вводят также координаты (xs, уs) всех опорных станций 2, дальности R действия базовых станций 1, математическое ожидание md и дисперсию Dd расстояния d между ближайшими базовыми станциями 1 и значение заданной длительности Т радиосигналов, передаваемых с базовых станций 1.
Система работает в двух режимах: «Передача радиосигналов с подвижного объекта 4» и «Определение местоположения подвижного объекта 4».
Режим «Передача радиосигналов с подвижного объекта 4». Двоичная последовательность импульсов, содержащая, например, идентификатор подвижного объекта 4, с выхода источника 27 сообщений передатчика 5 подвижного объекта 4 поступает на первый вход третьего преобразователя 28 частоты, на второй вход которого поступает гармонический сигнал частоты ƒr3, вырабатываемый третьим гетеродином 29. Амплитудно-манипулированный сигнал с выхода третьего преобразователя 28 частоты поступает на вход второго усилителя 30 мощности. Сигнал с выхода второго усилителя 30 мощности поступает на вход второй передающей антенны 31, которая излучает в пространство соответствующий радиосигнал заданной длительности Т в заданной полосе частот Δƒ.
Радиосигнал, переданный с подвижного объекта 4, принимают на первых базовых станциях 1, являющихся базовыми станциями 1, в пределах дальностей R действия которого находится подвижный объект 4 (на фиг.2 первыми базовыми станциями 1 являются базовые станции 134, 135, 144 и 145).
В приемопередатчике 3 каждой из первых базовых станций 1 сигнал с выхода приемной антенны 6 поступает на вход первого полосового фильтра 7. Первый полосовой фильтр 7 обеспечивает избирательность по зеркальному каналу. Сигнал с выхода первого полосового фильтра 7 поступает на вход малошумящего усилителя 8, сигнал с выхода которого поступает на первый вход первого преобразователя 9 частоты. На второй его вход поступает гармонический сигнал частоты ƒг1, вырабатываемый первым гетеродином 10. Сигнал, энергетический спектр которого сосредоточен в области промежуточной частоты, с выхода первого преобразователя 9 частоты поступает на входы вторых полосовых фильтров 12 каналов 11 обработки.
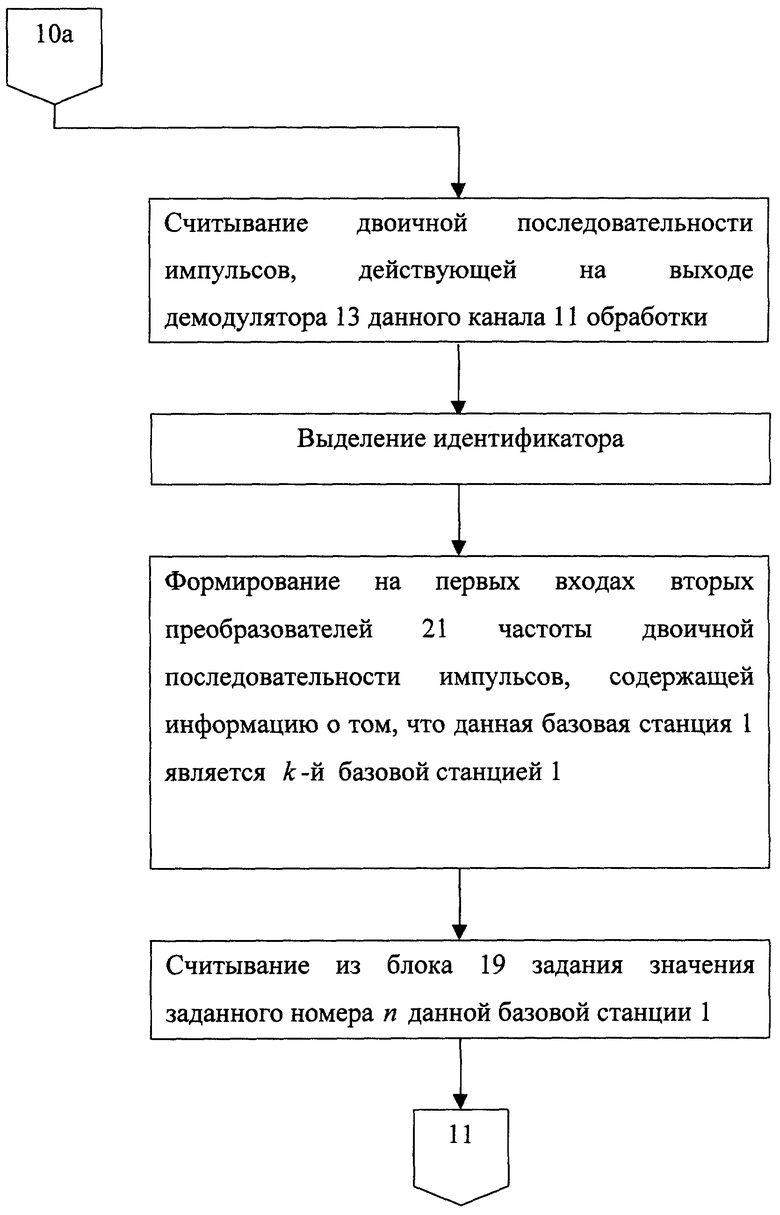
Поскольку с заданной полосой частот передачи подвижного объекта 4 смещенной по оси частот вниз на частоту ƒг1 настройки первого гетеродина 10 совпадает только полоса пропускания второго полосового фильтра 12 одного из М каналов 11 обработки (например, первого), сигнал с выхода только второго полосового фильтра 12 данного канала 11 обработки поступает на вход соответствующего демодулятора 13 и на вход блока 14 возведения в квадрат, сигнал с выхода которого поступает на вход интегратора 15. Сигнал с выхода интегратора 15 поступает на вход аналого-цифрового преобразователя 16, двоичный сигнал с выхода которого, соответствующий мощности принимаемого радиосигнала, поступает на соответствующие входы микроконтроллера 17 (последовательно соединенные блок 14 возведения в квадрат и интегратор 15 образуют измеритель мощности - см., например, Дж.Бендат, А.Пирсол. Прикладной анализ случайных данных. - М.: Мир, 1983, с.143). Микроконтроллер 17 принимает решение о наличии на входе приемопередатчика 3 радиосигнала подвижного объекта 4, считывает двоичную последовательность импульсов, действующую на выходе демодулятора 13 данного канала 11 обработки, выделяет идентификатор подвижного объекта 4 и сохраняет его в блоке 18 памяти.
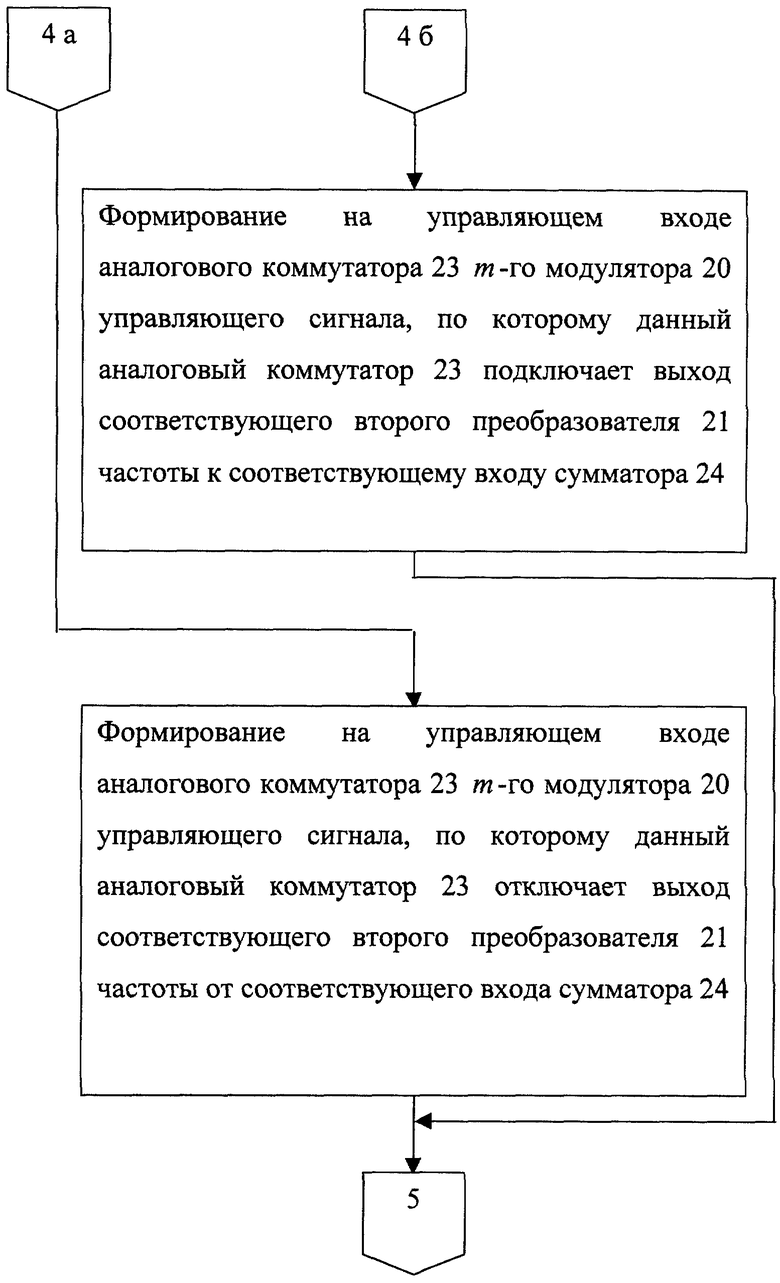
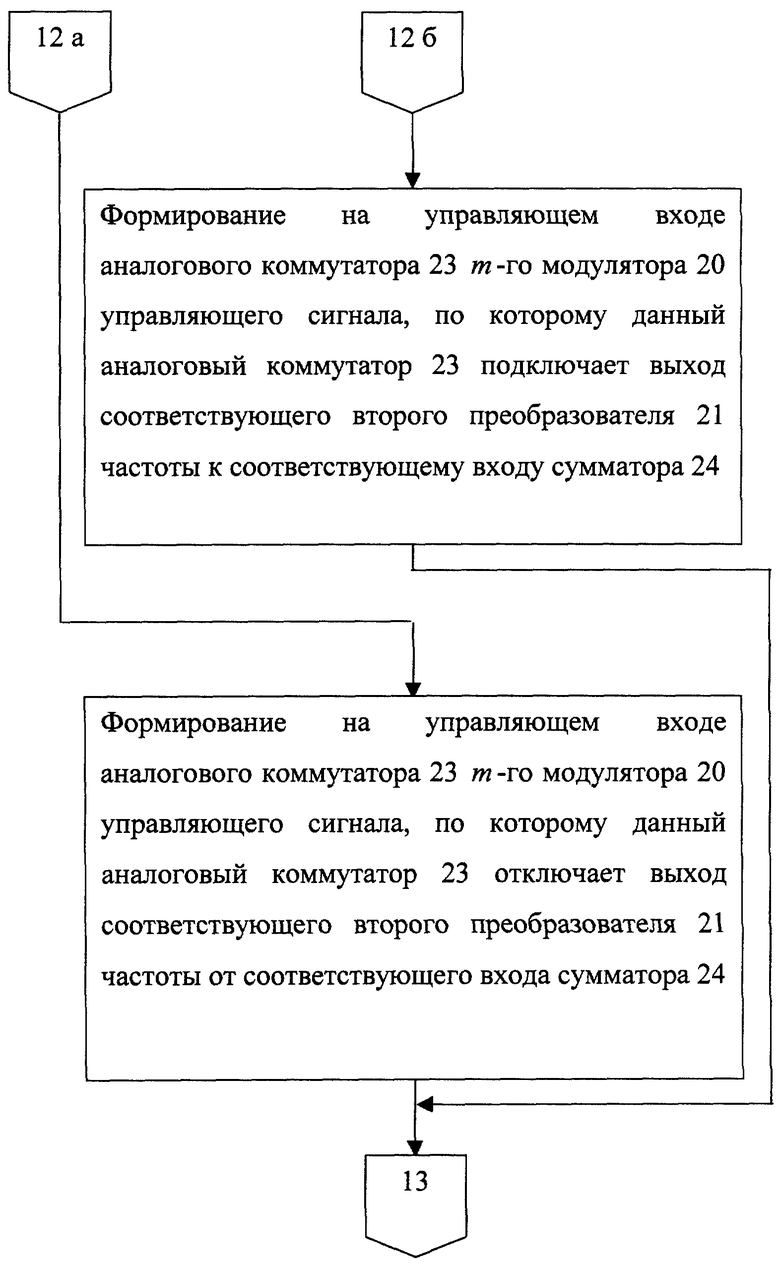
По окончании приема радиосигналов, передаваемых с подвижного объекта 4, микроконтроллер 17 формирует на первых входах вторых преобразователей 21 частоты двоичную последовательность импульсов, содержащую идентификатор подвижного объекта 4. Одновременно микроконтроллер 17 считывает из блока 19 задания заданный номер n данной базовой станции 1 и формирует на управляющих входах аналоговых коммутаторов 23 модуляторов 20 управляющие сигналы, соответствующие двоичному представлению n, определяемому формулой (7). При этом если аm=1, то микроконтроллер 17 формирует на
управляющем входе аналогового коммутатора 23 m-го модулятора 20 управляющий сигнал, по которому данный аналоговый коммутатор 23 подключает выход соответствующего второго преобразователя 21 частоты к соответствующему входу сумматора 24; если аm=0, то микроконтроллер 17 формирует на управляющем входе аналогового коммутатора 23 m-го модулятора 20 управляющий сигнал, по которому данный аналоговый коммутатор 23 отключает выход соответствующего второго преобразователя 21 частоты от соответствующего входа сумматора 24. Сигнал с выхода сумматора 24 поступает на вход первого усилителя 25 мощности, сигнал с выхода которого поступает на вход первой передающей антенны 26. Радиосигнал заданной длительности Т, излучаемый первой передающей антенной 26 в заданной полосе частот Δƒ, представляет собой сумму радиосигналов, передаваемых в М заданных неперекрывающихся полосах частот, где M>log2N, причем мощность радиосигнала, передаваемого в m-й заданной полосе частот, где m=1, 2,..., М - положительные целые числа, определена по n.
Радиосигналы, переданные с первых базовых станций 1, являющихся базовыми станциями 1, в пределах дальностей R действия которого находится подвижный объект 4, принимают на вторых базовых станциях 1, расположенных в пределах дальностей R действия первых базовых станций 1 (на фиг.2 вторыми базовыми станциями 1 являются базовые станции 124, 125, 136, 146, 155, 154, 143, 133).
В приемопередатчике 3 каждой из вторых базовых станций 1 сигнал с выхода приемной антенны 6 поступает на вход первого полосового фильтра 7. Сигнал с выхода первого полосового фильтра 7 поступает на вход малошумящего усилителя 8, сигнал с выхода которого поступает на первый вход первого преобразователя 9 частоты. На второй его вход поступает гармонический сигнал частоты ƒг1, вырабатываемый первым гетеродином 10. Сигнал, энергетический спектр которого сосредоточен в области промежуточной частоты, с выхода первого преобразователя 9 частоты поступает на входы вторых полосовых фильтров 12 каналов 11 обработки.
Сигнал с выхода второго полосового фильтра 12 каждого канала 11 обработки поступает на вход демодулятора 13 и на вход блока 14 возведения в квадрат, сигнал с выхода которого поступает на вход интегратора 15. Сигнал с выхода интегратора 15 поступает на вход аналого-цифрового преобразователя 16, двоичный сигнал с выхода которого, соответствующий мощности принимаемого радиосигнала, поступает на соответствующие входы микроконтроллера 17. В результате анализа сигналов, действующих на соответствующих выходах всех аналого-цифровых преобразователей 16, микроконтроллер 17 принимает решение о наличии на входе приемопередатчика 3 радиосигналов первых базовых станций 1, считывает двоичную последовательность импульсов, действующую на выходе демодулятора 13 одного из каналов 11 обработки, выделяет идентификатор подвижного объекта 4 и сохраняет его в блоке 18 памяти.
Радиосигнал, передаваемый каждой из первых базовых станций 1, представляет собой сумму радиосигналов, передаваемых в М заданных неперекрывающихся полосах частот, где M>log2N, причем мощность радиосигнала, передаваемого в m-й заданной полосе частот, где m=1, 2,..., М - положительные целые числа, определена по n. При выполнении условий (4)-(6) достоверным является событие, состоящее в том, что на входе каждой второй базовой станции 1 (фиг.2) присутствует одновременно не более двух радиосигналов, передаваемых в заданной полосе частот Δƒ с двух первых базовых станций 1, расположенных в пределах дальности R действия данной второй базовой станции 1. В связи с этим, с учетом того, что различным n соответствуют различные двоичные комбинации, достоверным является событие, состоящее в том, что найдется некоторая m-я полоса частот Δƒm, в которой указанные первые базовые станции 1 передают радиосигналы, существенно различающиеся по мощности, а следовательно, замирания в данной m-й полосе частот будут отсутствовать - выражения (7)-(10). Таким образом, достоверным является событие, состоящее в том, что найдется хотя бы один из М каналов 11 обработки, сигнал на выходе демодулятора 13 которого будет иметь достаточную для обработки мощность.
По окончании приема радиосигналов, передаваемых с первых базовых станций 1, микроконтроллер 17 формирует на первых входах вторых преобразователей 21 частоты двоичную последовательность импульсов, содержащую идентификатор подвижного объекта 4. Одновременно микроконтроллер 17 считывает из блока 19 задания заданный номер n данной базовой станции 1 и формирует на управляющих входах аналоговых коммутаторов 23 модуляторов 20 управляющие сигналы, соответствующие двоичному представлению n, определяемому формулой (7). При этом если аm=1, то микроконтроллер 17 формирует на управляющем входе аналогового коммутатора 23 m-го модулятора 20 управляющий сигнал, по которому данный аналоговый коммутатор 23 подключает выход соответствующего второго преобразователя 21 частоты к соответствующему входу сумматора 24; если аm=0, то микроконтроллер 17 формирует на управляющем входе аналогового коммутатора 23 m-го модулятора 20 управляющий сигнал, по которому данный аналоговый коммутатор 23 отключает выход соответствующего второго преобразователя 21 частоты от соответствующего входа сумматора 24. Сигнал с выхода сумматора 24 поступает на вход первого усилителя 25 мощности, сигнал с выхода которого поступает на вход первой передающей антенны 26. Радиосигнал заданной длительности Т, излучаемый первой передающей антенной 26 в заданной полосе частот Δƒ, представляет собой сумму радиосигналов, передаваемых в М заданных неперекрывающихся полосах частот, где M>log2N, причем мощность радиосигнала, передаваемого в m-й заданной полосе частот, где m=1, 2,..., М - положительные целые числа, определена по n.
Затем таким же образом последовательно, по всем направлениям от первых базовых станций 1 принимают радиосигналы, передаваемые с (k-1)-x базовых станций, на всех k-x базовых станциях 1, расположенных в пределах дальностей R действия (k-1)-x базовых станций 1, причем k-e базовые станции 1 не являются (k-2)-ми базовыми станциями 1, где k=3, 4,..., К - положительные целые числа, и по окончании их приема передают радиосигналы с k-х базовых станций 1.
Передача радиосигналов без зацикливания обеспечивается тем, что при заданной длительности радиосигналов, передаваемых со всех базовых станций 1, микроконтроллер 17 каждой первой базовой станции 1 блокирует обработку принимаемых радиосигналов на время передачи радиосигналов с первых базовых станций 1 и со вторых базовых станций 1; микроконтроллер 17 каждой второй базовой станции 1 блокирует обработку принимаемых радиосигналов на время передачи радиосигналов со вторых базовых станций 1 и с третьих базовых станций 1; микроконтроллер 17 каждой k-й базовой станции 1 блокирует обработку принимаемых радиосигналов на время передачи радиосигналов с k-x базовых станций 1 и с (k+1)-х базовых станций 1 (при k<K), где k=3, 4,..., К - положительные целые числа.
Поскольку опорные станции 2 являются выбранными из числа базовых станций 1, они также осуществляют прием и передачу радиосигналов описанным образом. При этом микроконтроллер 17 s-й опорной станции 2 фиксирует момент времени ts приема радиосигналов на данной опорной станции 2 и сохраняет его в блоке 18 памяти.
При условии, что длительности радиосигналов, передаваемых с подвижного объекта 4 и со всех базовых станций 1, равны Т, передача радиосигналов с подвижного объекта 4 и со всех базовых станций 1, определяющая режим «Передача радиосигналов с подвижного объекта 4», занимает время, равное

где τ - время распространения радиосигналов между ближайшими базовыми станциями 1; τd - продолжительность защитного интервала.
Формула (19) не учитывает задержки сигналов в приемопередающих трактах базовых станций 1.
По окончании режима «Передача радиосигналов с подвижного объекта 4» система приходит в режим «Определение местоположения подвижного объекта 4».
В общем случае местоположение подвижного объекта 4 можно определять на любом объекте, на который будет передана информация с опорных станций 2. При этом передачу информации с опорных станций 2 можно осуществлять любым известным способом.
В данном случае рассматривается пример определения местоположения подвижного объекта 4 на одной из базовых станций 1 (например, базовая станция 127), при котором информацию с опорных станций 2 передают на данную базовую станцию 1 последовательно от базовой станции 1 к базовой станции 1 по радиоканалу аналогично передаче радиосигналов с подвижного объекта 4 на все базовые станции 1, описанной для режима «Передача радиосигналов с подвижного объекта 4».
При этом информацию с опорных станций 2 передают поочередно в порядке возрастания их номеров s. При условии, что длительности радиосигналов, передаваемых с базовых станций 1 в режимах «Передача радиосигналов с подвижного объекта 4» и «Определение местоположения подвижного объекта 4», равны T, интервал времени, отделяющий начало передачи информации с опорной станции 22 от начала передачи радиосигналов с опорной станции 21, обеспечивают с учетом формулы (19).
В режиме «Определение местоположения подвижного объекта 4» передачу радиосигналов с подвижного объекта 4 не осуществляют.
При этом передают с опорной станции 21 (s=1), являющейся выбранной из числа базовых станций 1, радиосигналы, содержащие информацию о моменте времени t1 приема радиосигналов на данной опорной станции 2 в течение режима «Передача радиосигналов с подвижного объекта 4». Принимают радиосигналы, передаваемые с данной опорной станции 2, на вторых базовых станциях 1, расположенных в пределах дальности R действия данной опорной станции 2, и передают их. Затем таким же образом последовательно, по всем направлениям от первых базовых станций 1 принимают радиосигналы, передаваемые с (k-1)-x базовых станций 1, на всех k-x базовых станциях 1, расположенных в пределах дальностей R действия (k-1)-х базовых станций 1, причем k-e базовые станции 1 не являются (k-2)-ми базовыми станциями 1, где k=3, 4,..., К - положительные целые числа, и передают их.
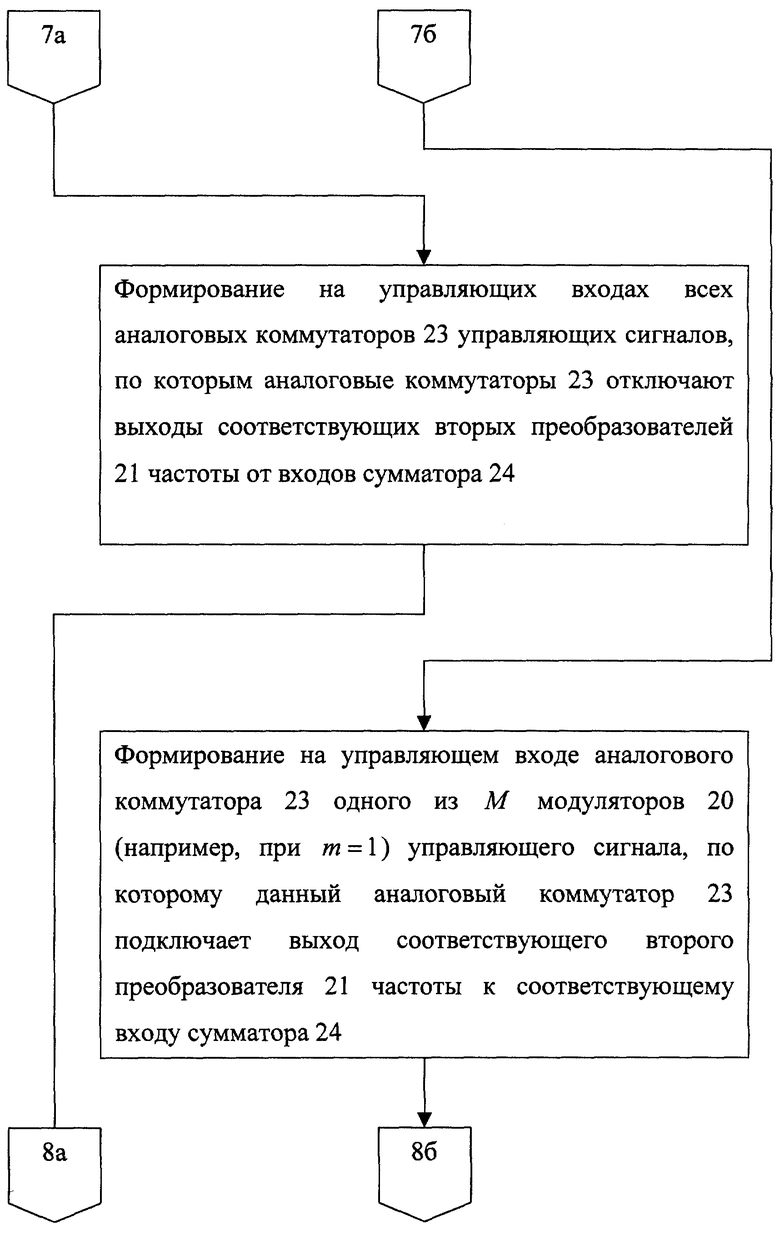
В приемопередатчике каждой опорной станции 2 микроконтроллер 17 считывает из блока 19 задания номер s данной опорной станции 2. Если s≠1, то микроконтроллер 17 формирует управляющие сигналы на управляющих входах всех аналоговых коммутаторов 23 управляющие сигналы, по которым аналоговые коммутаторы 23 отключают выходы соответствующих вторых преобразователей 21 частоты от входов сумматора 24, и данная опорная станция 2 работает так же, как в режиме «Передача радиосигналов с подвижного объекта 4».
Если s=1, то микроконтроллер 17 формирует на первых входах вторых преобразователей 21 частоты двоичную последовательность импульсов, содержащую информацию о моменте времени t1 приема радиосигналов на данной опорной станции 2 в течение режима «Передача радиосигналов с подвижного объекта 4». Одновременно микроконтроллер 17 формирует на управляющем входе аналогового коммутатора 23 одного из М модуляторов 20 (например, при m=1) управляющий сигнал, по которому данный аналоговый коммутатор 23 подключает выход соответствующего второго преобразователя 21 частоты к соответствующему входу сумматора 24. На управляющих входах всех других аналоговых коммутаторов 23 микроконтроллер 17 формирует управляющие сигналы, по которым данные аналоговые коммутаторы 23 отключают выходы соответствующих вторых преобразователей 21 частоты от входов сумматора 24. Сигнал с выхода сумматора 24 поступает на вход первого усилителя 25 мощности, сигнал с выхода которого поступает на вход первой передающей антенны 26. Мощность радиосигнала, излучаемого первой передающей антенной 26 в заданной полосе частот Δƒ, сосредоточена лишь в первой (m=1) из М заданных неперекрывающихся полосах частот, где M>log2N. Поскольку источником передаваемых радиосигналов является только одна базовая станция 1, являющаяся опорной станцией 21, замирания при приеме радиосигналов, сформированных указанным образом, не возникают.
Работа остальных базовых станций 1 происходит аналогично описанному для режима «Передача радиосигналов с подвижного объекта 4». Исключение составляет лишь базовая станция 1 (в данном случае базовая станция 127), на которой определяют местоположение подвижного объекта 4. Микроконтроллер 17 данной базовой станции 1 в результате считывания сигналов, действующих на выходах демодуляторов 13, определяет момент времени t1 приема радиосигналов на опорной станции 21 в течение режима «Передача радиосигналов с подвижного объекта 4», и сохраняет эту информацию в блоке 18 памяти.
Через интервал времени Т0, определяемый формулой (19), аналогичным образом передают с опорной станции 22 (s=2), являющейся выбранной из числа базовых станций 1, радиосигналы, содержащие информацию о моменте времени t2 приема радиосигналов на данной опорной станции 2 в течение режима «Передача радиосигналов с подвижного объекта 4». Принимают радиосигналы, передаваемые с данной опорной станции 2, на вторых базовых станциях 1, расположенных в пределах дальности R действия данной опорной станции 2, и передают их. Затем таким же образом последовательно, по всем направлениям от первых базовых станций 1 принимают радиосигналы, передаваемые с (k-1)-х базовых станций 1, на всех k-x базовых станциях 1, расположенных в пределах дальностей R действия (k-1)-х базовых станций 1, причем k-e базовые станции 1 не являются (k-2)-ми базовыми станциями 1, где k=3, 4,..., К - положительные целые числа, и передают их.
Работа приемопередатчика 3 опорной станции 22 (s=2) аналогична работе приемопередатчика 3 опорной станции 21 (s=1) в данном режиме «Определение местоположения подвижного объекта 4». Работа остальных базовых станций 1 происходит аналогично описанному для режима «Передача радиосигналов с подвижного объекта 4» (проверяется условие s=2). Исключение составляет лишь базовая станция 1 (в данном случае базовая станция 127), на которой определяют местоположение подвижного объекта 4. Микроконтроллер 17 данной базовой станции 1 в результате считывания сигналов, действующих на выходах демодуляторов 13, определяет момент времени t2 приема радиосигналов на опорной станции 22 в течение режима «Передача радиосигналов с подвижного объекта 4», и сохраняет эту информацию в блоке 18 памяти.
Через интервал времени Т0, определяемый формулой (19), аналогичным образом передают с опорной станции 23 (s=3), являющейся выбранной из числа базовых станций 1, радиосигналы, содержащие информацию о моменте времени t3 приема радиосигналов на данной опорной станции 2 в течение режима «Передача радиосигналов с подвижного объекта 4». Принимают радиосигналы, передаваемые с данной опорной станции 2, на вторых базовых станциях 1, расположенных в пределах дальности R действия данной опорной станции 2, и передают их. Затем таким же образом последовательно, по всем направлениям от первых базовых станций 1 принимают радиосигналы, передаваемые с (k-1)-х базовых станций 1, на всех k-x базовых станциях 1, расположенных в пределах дальностей R действия (k-1)-x базовых станций 1, причем k-e базовые станции 1 не являются (k-2)-ми базовыми станциями 1, где k=3, 4,..., K - положительные целые числа, и передают их.
Работа приемопередатчика 3 опорной станции 23 (s=3) аналогична работе приемопередатчиков 3 опорных станций 21 (s=1) и 22 (s=2) в данном режиме «Определение местоположения подвижного объекта 4». Работа остальных базовых станций 1 происходит аналогично описанному для режима «Передача радиосигналов с подвижного объекта 4» (проверяется условие s=3). Исключение составляет лишь базовая станция 1 (в данном случае базовая станция 127), на которой определяют местоположение подвижного объекта 4. Микроконтроллер 17 данной базовой станции 1 в результате считывания сигналов, действующих на выходах демодуляторов 13, определяет момент времени t3 приема радиосигналов на опорной станции 23 в течение режима «Передача радиосигналов с подвижного объекта 4», и сохраняет эту информацию в блоке 18 памяти.
Затем на данной базовой станции 1 осуществляют определение местоположения подвижного объекта 4. При этом микроконтроллер 17 считывает из блока 18 памяти значения моментов времени t1, t2 и t3 приема радиосигналов соответственно на опорных станциях 21, 22 и 23 в течение режима «Передача радиосигналов с подвижного объекта 4» и считывает из блока 19 задания координаты этих опорных станций 2, дальности R действия базовых станций 1 и значение заданной длительности Т радиосигналов, по которым затем с помощью формул (11)-(17) получает оценки координат подвижного объекта 4 и сохраняет результаты вычислений в блоке 18 памяти, из которого они могут быть извлечены известными способами.
В данном случае число опорных станций 2 равно трем. При большем числе опорных станций 2 работа системы происходит аналогичным образом.
Затем система приходит в режим «Передача радиосигналов с подвижного объекта 4». При этом интервал времени, отделяющий начало передачи информации с подвижного объекта 4 от начала передачи радиосигналов с последней опорной станции 2, определяют по формуле (19).
Применяемым в описании формулам могут соответствовать следующие параметры системы: N=60; К=14; md=300 м; Dd=75 м2; R=315 м; Рпрд=10-3 Вт; Рп.мин=10-11 Вт; T=0,02 с; скорость передачи информации с каждой базовой станции 1 и с подвижного объекта 4 не более 512 бит/с; заданная полоса частот радиосигналов, передаваемых с базовых станций 1 и с подвижного объекта 4, составляет Δƒ=900,0...900,1 МГц.
Таким образом, определение местоположения подвижного объекта по заданной длительности радиосигналов, передаваемых с базовых станций, и моментам времени приема радиосигналов на опорных станциях не требует при введении дополнительных базовых станций, осуществляемом, например, с целью уменьшения мощности излучаемых радиосигналов, трудоемкого перезадания полос частот радиосигналов, передаваемых с каждой базовой станции, что упрощает способ. Кроме того, способ не требует задания на каждой базовой станции координат размещения всех базовых станций и соответствующих им идентификационных номеров, что также упрощает способ.








| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2258236C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2258237C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2258235C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2258238C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2258240C2 |
| СПОСОБ РАДИОСВЯЗИ МЕЖДУ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2003 |
|
RU2251807C2 |
| СПОСОБ РАДИОСВЯЗИ МЕЖДУ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2003 |
|
RU2251808C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2001 |
|
RU2195776C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2001 |
|
RU2195777C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2001 |
|
RU2195781C2 |




Изобретение относится к области радионавигации и может использоваться для определения местоположения подвижных объектов. Базовые станции с заданными дальностями действия размещают со случайным разбросом около вершин условных ячеек, представляющих собой равные правильные многоугольники, плотно примыкающие друг к другу сторонами, с заданными математическим ожиданием и дисперсией расстояния между ближайшими базовыми станциями. Радиосигнал, принятый от подвижного объекта, на базовых станциях, которые являются первыми, передают от этих базовых станций вторым базовым станциям и далее эстафетно последующим базовым станциям, находящимся в пределах дальности действия предыдущих базовых станций. Передачу радиосигналов с последующих базовых станций осуществляют по окончании приема с предыдущих базовых станций, при этом местоположение подвижного объекта определяют по заданным дальностям действия базовых станций, по заданным координатам опорных станций, по заданному расстоянию между ближайшими базовыми станциями и по заданной длительности радиосигналов, передаваемых с базовых станций. Технический результат - упрощение. 1 з.п. ф-лы, 7 ил.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2001 |
|
RU2195776C2 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ УСТАНОВКИ И ПЕРЕДВИГАНИЯ У ЗАБОЯ РУЧНОГО ЭЛЕКТРОСВЕРЛА | 1929 |
|
SU19595A1 |
| ВРУБОВАЯ МАШИНА ДЛЯ ВЫЕМКИ УГЛЯ СПЛОШНЫМ СТОЛБОМ | 1929 |
|
SU19594A1 |
| Огнетушитель | 0 |
|
SU91A1 |

