Область техники, к которой относится изобретение
Настоящее изобретение относится к определению местоположения пользовательского оборудования с использованием измерения истинного времени прохождения сигнала в прямом и обратном направлениях в широкополосных сетях третьего поколения с множественным доступом с кодовым разделением каналов.
Уровень техники
Системы мобильной связи третьего поколения (3G) включают в себя службы определения местоположения (СОМ), которые измеряют радиосигналы с целью определения географического положения пользовательского оборудования (ПОб). Информация о местоположении может быть затребована и передана клиенту и/или связанному с ПОб приложению, либо внешнему клиенту базовой сети (БзС) системы мобильной связи 3G. Более того, информация о местоположении также используется Универсальной наземной сетью с радиодоступом (УНСРД) системы мобильной связи 3G с целью обеспечения передач обслуживания с учетом местоположения или поддержки другой функциональности, такой как составление местными операторами счетов за услуги связи.
Службы СОМ систем мобильной связи 3G базируются на способах, используемых для глобальной системы мобильной связи (ГСМС, GSM) и включающих в себя время прихода (ВП) сигнала, наблюдаемую разницу во времени прихода (НРВП) сигнала и глобальную систему определения положения (ГСОП). Эти способы определения местоположения описаны в технической спецификации ГСМС 03.71, версия 7.2.1. Способ ВП включает в себя передачу сигнала от ПОб и измерение времени прихода этого сигнала тремя или более измерительными устройствами. Значения разницы во времени прихода сигнала определяются посредством по парного вычитания измеренных времен прихода сигнала. В результате местоположение мобильного устройства можно вычислить с помощью гиперболической трилатерации. Однако для определения истинных значений разницы во времени необходимо знать или определить фактическую разницу во времени (ФРВ) между тремя измерительными устройствами.
С помощью реализуемого СОМ способа НРВП в ПОб измеряется разница во времени прихода сигналов от нескольких узлов или приемопередающих базовых станций (ППБС). Этот способ также требует определения ФРВ между ППБС. Как для способа ВП, так и для способа НРВП, реализуемых СОМ, определение ФРВ является весьма сложным и, таким образом, снижает эффективность рассматриваемой системы.
Более того, способ определения местоположения с использованием ГСОП требует, чтобы ПОб было оснащено приемником ГСОП. Выполнение этого требования приведет к удорожанию и увеличению размеров ПОб.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание способа определения географического положения пользовательского оборудования (ПОб) посредством вычисления истинного времени прохождения сигнала в прямом и обратном направлениях (ВПСПОН).
В соответствии с вариантом осуществления настоящего изобретения способ определения географического положения ПОб в беспроводной сети 3G включает в себя измерение ВПСПОН между ПОб и, по меньшей мере, тремя радиопередающими узлами рассматриваемой беспроводной сети. ВПСПОН - это время между передачей по нисходящей линии связи (НЛ) от некоего узла в ПОб и приемом в указанном узле передачи по восходящей линии связи (ВЛ) от рассматриваемого ПОб в ответ на передачу по НЛ. ВПСПОН проиллюстрировано на Фиг.4. В момент времени t1 Узел Б беспроводной сети начинает передачу по выделенному физическому каналу (ВФКн) НЛ. ПОб принимает эту передачу по НЛ в момент времени 12, который определяет задержку Тр, связанную с прохождением сигнала в одном направлении, от момента t1. По истечении времени, равного номинальной задержке Т0 времени передачи, рассматриваемое ПОб в момент времени t3 начинает передачу по ВФКн ВЛ в ответ на передачу по НЛ. При повторном истечении задержки, связанной с прохождением сигнала в одном направлении, Узел Б принимает указанную передачу по ВЛ в момент времени t4. Таким образом, ВПСПОН включает в себя первую задержку, связанную с прохождением сигнала в одном направлении, номинальную задержку времени передачи и вторую задержку, связанную с прохождением сигнала в одном направлении, то есть ВПСПОН=Тр+Т0+Тр. Номинальная задержка времени передачи определяется как постоянное значение, равное 1024 чипам (элементарным сигналам).
ВПСПОН, измеряемое в пределах сотовой ячейки в Узле Б (которым может быть приемопередающая базовая станция (ППБС)), относящемся к универсальной наземной сети с радиодоступом (УНСРД) системы мобильной связи 3G, грубо оценивается как разность между t4 и t1. В силу того, что значение номинальной задержки времени передачи или, другими словами, временного сдвига То в ПОб между передачами по НЛ и ВЛ (временного сдвига НЛ-ВЛ) известно (t3-t2), то равную 2Тр задержку, связанную с прохождением сигнала в прямом и обратном направлениях (ЗПСПОН), можно вычислить посредством вычитания Т0 из ВПСПОН. В силу того, что ЗПСПОН связана с расстоянием (как время × скорость), местоположение рассматриваемого ПОб можно определить, если данное ПОб связано с тремя или более узлами УНСРД, местоположения которых известны.
Однако в сети 3G разница во времени в ПОб между передачей и приемом, равная времени, прошедшему между приемом ПОб передачи по НЛ и передачей по ВЛ данным ПОб (то есть t3-t2), не является фиксированным периодом времени и может отличаться от номинальной задержки Т0 времени передачи в случаях, если: (1) ПОб сравнительно быстро перемещается по направлению к ППБС или в противоположном направлении, (2) тракты распространения меняются и (3) имеет место мягкая передача обслуживания ПОб от одной сотовой ячейки в другую. Следовательно, определение географического положения на основе ВПСПОН с использованием номинальной задержки То времени передачи может оказаться несколько неточным.
В соответствии с настоящим изобретением ВПСПОН и разница (t3-t2) во времени в ПОб между передачей и приемом определяются для каждой сотовой ячейки, с которой связано данное ПОб в тот момент, когда сервер СОМ или какой-либо другой сервер вычисляет местоположение рассматриваемого ПОб. Используя эти значения, можно точно определить истинное значение ЗПСПОН.
Настоящее изобретение позволяет избежать присущей измерениями ВПСПОН неточности в определении задержки, связанной с прохождением сигнала, причем данная неточность обусловлена разновидностью между разницей во времени в ПОб между передачей и приемом и номинальной задержкой Т0 времени передачи. В предпочтительном варианте осуществления ВПСПОН измеряется отдельно для каждой сотовой ячейки, с которой рассматриваемое ПОб поддерживает активный сеанс связи. Следовательно, предпочтительный вариант осуществления позволяет обойти требование о необходимости определения фактической разницы во времени (ФРВ) между различными узлами, используемыми для измерений.
Другие задачи и отличительные признаки настоящего изобретения становятся более очевидными при подробном описании, приведенном ниже совместно с сопутствующими чертежами. Тем не менее, следует понимать, что данные чертежи предназначены исключительно для иллюстративных целей, а не в качестве определения ограничений настоящего изобретения, ссылка на которые делается в прилагающейся формуле изобретения. Следует также понимать, что данные чертежи необязательно выдержаны в масштабе и что они предназначены для иллюстрации концепции описываемых в настоящем документе структур и процедур, если не оговаривается обратное.
КРАТКОЕ ОПИСАНИЕ ФИГУР ЧЕРТЕЖЕЙ
На чертежах:
Фиг.1 является блок-схемой системы мобильной связи третьего поколения, имеющей в составе сервер службы определения местоположения.
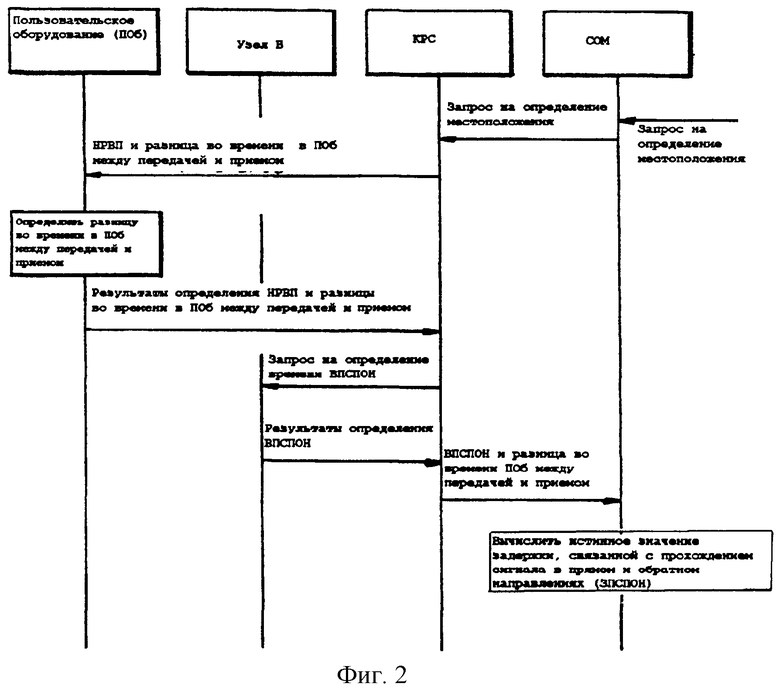
Фиг.2 является блок-схемой обмена сигналами, используемой в способе, соответствующем настоящему изобретению.
Фиг.3 является блок-схемой, отображающей операции определения географического положения ПОб в соответствии с вариантом осуществления настоящего изобретения.
Фиг.4 является временной диаграммой, показывающей задержки, связанные с прохождением сигнала, и задержку времени передачи, являющиеся слагаемыми времени прохождения сигнала в прямом и обратном направлениях.
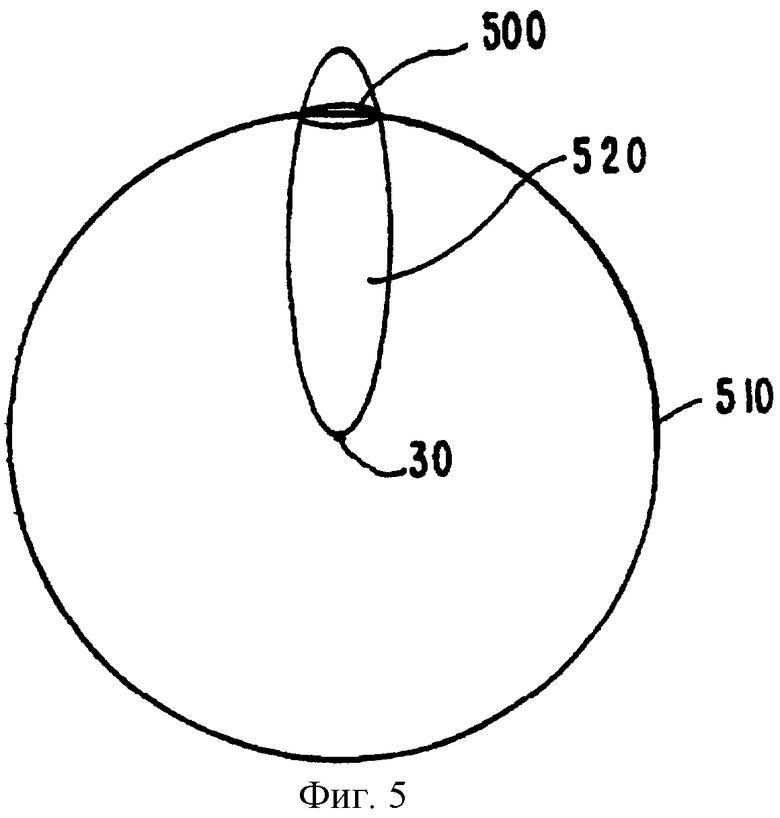
Фиг.5 является схемой, показывающей измерения, используемые для определения местоположения ПОб при помощи одного измерения ВПСПОН и измерения угла прихода (УП) сигнала.
Фиг.6 является схемой, показывающей измерения, используемые для определения местоположения ПОб при помощи двух измерений ВПСПОН и двух измерений УП.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ НА ТЕКУЩИЙ МОМЕНТ ВАРИАНТОВ ИЗОБРЕТЕНИЯ
На Фиг.1 изображена система 100 мобильной связи третьего поколения (3G), предназначенная для реализации способа, соответствующего настоящему изобретению. Система 100 мобильной связи 3G включает в себя базовую сеть 10 (БзС) с сервером 15 службы определения местоположения (СОМ), предназначенным для предоставления информации о местоположении пользовательского оборудования 20 (ПОб) в пределах географической области, покрываемой БзС 10. ПОб 20 представляет собой мобильное устройство с одним или несколькими модулями идентификации абонента (МИА) универсальной системы мобильных телекоммуникаций (УСМТ). ПОб 20 может включать в себя мобильный телефон; персональное информационное устройство (ПИУ); устройство, основанное на технологии протокола мобильной интерактивной связи с Интернет (WAP, МИС), или любое другое мобильное устройство, поддерживающее беспроводную связь. Множество подсистем 40 радиосети (ПРС) функционально связаны с БзС 10. Каждая ПРС 40 включает в себя множество радиопередающих узлов 30. Каждый узел 30 включает в себя Узел Б, то есть логический узел, предназначенный для радиосвязи с ПОб 20 в одной или нескольких сотовых ячейках, находящихся в географической области данного Узла Б. Каждая ПРС 40 также имеет в своем составе один или несколько контроллеров 35 радиосети (КРС). Каждый КРС 35 связан с одним или несколькими узлами 30 для управления использованием радиоресурсов и контроля их целостности. Подсистемы ПРС 40 в совокупности называются универсальной наземной сетью 50 с радиодоступом (УНСРД). БзС 10 также включает в себя узел 60 поддержки общей службы пакетной радиопередачи (УПОСПР) 3G, предназначенный для передачи данных, и центр 70 коммутации мобильной связи (ЦКМС) 3G, предназначенный для передачи речи.
Сервер 15 СОМ определяет местоположение и сообщает информацию о местоположении клиенту или связанному с ПОб 20 приложению либо внешнему клиенту 80, соединенному с БзС 10 системы 100 мобильной связи 3G. Информация о местоположении также может использоваться УНСРД 50 рассматриваемой системы мобильной связи 3G для обеспечения передач обслуживания с учетом местоположения и/или поддержки другой функциональности, такой как составление местными операторами счетов за услуги связи. Более того, информация о местоположении может также потребоваться для обеспечения прямой направленной передачи сигналов связи в ПОб 20.
В предпочтительном варианте осуществления настоящего изобретения сервер 15 СОМ определяет истинное время прохождения сигнала в прямом и обратном направлениях (ВПСПОН) между ПОб 20 и, по меньшей мере, тремя сотовыми ячейками, относящимися к узлам 30. Данную операцию можно выполнить посредством передачи заданного кадра в составе передачи по нисходящей линии связи (НЛ) в рассматриваемое ПОб от, по меньшей мере, трех сотовых ячеек, относящихся к узлам 30, на который данное ПОб отвечает посредством заданного кадра в составе передачи по восходящей линии связи (ВЛ). Согласно временной диаграмме по Фиг.4, сервер 15 СОМ измеряет ВПСПОН от момента t1 начала передачи по НЛ от УНСРД 50 в ПОб 20 до момента t4 начала приема в УНСРД 50 передачи по ВЛ. Слагаемыми ВПСПОН являются задержка Тр, связанная с прохождением сигнала в одном направлении при передаче от ПОб 20 в узел 30, и задержка Тр, связанная с прохождением сигнала в одном направлении при передаче от узла 30 в ПОб 20. Еще одним слагаемым ВПСПОН является разница (t3-t2) во времени в ПОб между передачей и приемом. Эта разница во времени представляет собой время между приемом ПОб 20 передачи по НЛ и передачей по ВЛ, осуществляемой данным ПОб. Номинальное значение разницы во времени в ПОб между передачей и приемом равно 1024 чипам. Номинальное значение разницы во времени в ПОб между передачей и приемом также называется номинальной задержкой времени передачи или временным сдвигом НЛ-ВЛ. Однако существуют определенные ситуации, когда разница (t3-t2) во времени в ПОб между передачей и приемом может отличаться от вышеприведенного номинального значения. Эти ситуации имеют место, когда: (1) ПОб перемещается по направлению к узлу или ППБС или в противоположном направлении, (2) тракты распространения меняются и (3) имеет место мягкая передача обслуживания ПОб от одной сотовой ячейки в другую.
При перемещении ПОб по направлению к ППБС или в противоположном направлении задержка, связанная с прохождением сигнала между моментами t1 и t2, меняется. ПОб 20 меняет t3 в соответствии с данным изменением таким образом, чтобы разность (t3-t2) оказывалась равной номинальной задержке времени передачи, которая, в свою очередь, равна 1024 чипам. Однако значение, на которое можно изменить t3 при каждом его приращении, ограничено. Следовательно, если перемещение происходит слишком быстро, то ПОб 20 не может скорректировать время t3 с достаточной быстротой в силу налагаемого ограничения на приращение.
Похожий тип ошибки имеет место при смене тракта распространения. При смене тракта распространения длина нового тракта распространения обычно отличается от длины предыдущего тракта распространения. Следовательно, при смене трактов распространения изменяется задержка, связанная с прохождением сигнала, тем самым воздействуя на длительность интервала между t2 и t3.
Третья ситуация, в которой разница во времени в ПОб между передачей и приемом может отличаться от номинальной задержки То времени передачи, имеет место после мягкой передачи обслуживания. Во время мягкой передачи обслуживания ПОб от исходной сотовой ячейки в целевую сотовую ячейку последняя адаптирует временные характеристики ПОб с точностью, лежащей в ограниченном 256 чипами интервале. Следовательно, после мягкой передачи обслуживания разница во времени в ПОб между передачей и приемом обычно оказывается некорректной - вероятность события, когда после мягкой передачи обслуживания разность между разницей во времени в ПОб между передачей и приемом и номинальной задержкой Т0 времени передачи равна нулю, оказывается равной 1/255. Эти разности, которые могут иметь место между разницей во времени в ПОб между передачей и приемом и номинальным значением Т0 задержки времени передачи, оказываются неблагоприятными при определении слагаемого измеренного ВПСПОН, связанного с задержкой, которая обусловлена прохождением сигнала. Таким образом, когда сервер 15 СОМ принимает запрос на определение местоположения, данный сервер должен определить разницу во времени в ПОб 20 между передачей и приемом для определения истинного значения задержки, связанной с прохождением сигнала в прямом и обратном направлениях (ЗПСПОН). ПОб 20 может передавать на сервер 15 информацию, касающуюся текущего значения разницы во времени в ПОб между передачей и приемом только по мере необходимости (то есть в ответ на получение запроса на определение местоположения) или через регулярные периодические интервалы времени.
В силу того, что длительность Тр задержек, связанных с прохождением сигнала при передачах по НЛ и ВЛ, связана с расстояниями между ПОб 20 и узлами 30 (то есть расстояние = время × скорость), расстояние между ПОб 20 и конкретным узлом 30 можно определить на основе ВПСПОН, если известна разница во времени в ПОб между передачей и приемом. Когда определены расстояния между ПОб 20 и, по меньшей мере, тремя из узлов 30, а также известны местоположения этих, по меньшей мере, трех из узлов 30, местоположение ПОб 20 можно определить посредством вычисления точки пересечения трех окружностей с центрами в известных местоположениях трех указанных узлов 30, причем радиусы данных окружностей равны расстояниям до соответствующих узлов.
Сервер 15 СОМ может располагаться в любом месте рассматриваемой сети и может быть встроен в другие ее составляющие, такие как контроллеры КРС 35 или подсистемы ПРС 40. Более того, сервер 15а СОМ, располагающийся в другой БзС 10а, также может запрашивать измерения ВПСПОН.
На Фиг.2 изображена блок-схема обмена сигналами, а на Фиг.3 показана блок-схема, иллюстрирующая операции, необходимые для определения местоположения ПОб посредством измерения истинного ВПСПОН. При операции 200 по Фиг.3 инициируется запрос на определение местоположения пользовательского оборудования. Это может быть сделано пользовательским оборудованием, клиентом базовой сети или самой базовой сетью для содействия в выполнении операций над пользовательским оборудованием, таких как, например, передача обслуживания или направленная передача. При операции 210 в ответ на указанный запрос измеряется ВПСПОН между ПОб и активными Узлами Б 30 УНСРД 50, и результаты передаются на сервер 15 СОМ. На Фиг.2 показан порядок обмена сигналами в процессе измерения ВПСПОН. КРС передает в ПОб запрос на измерение НРВП и разницы во времени в ПОб между приемом и передачей для каждого активного Узла Б. Каждый активный Узел Б осуществляет передачу по НЛ на рассматриваемое ПОб, а ПОб в ответ осуществляет передачу по ВЛ, которая принимается каждым активным Узлом Б. Результаты измерений передаются на сервер 15 СОМ. КРС запрашивает у активных Узлов Б результаты измерений ВПСПОН. При операции 210 серверу 15 СОМ также передаются данные о местоположении станций ППБС (сотовых ячеек) активных Узлов Б 30. При операции 220 результаты измерений разницы во времени в ПОб между приемом и передачей и измерений ВПСПОН передаются назад на сервер СОМ. Передача этих результатов от ПОб может осуществляться отдельно от передачи по восходящей линии связи или в ее составе. Результаты всех измерений пересылаются на сервер 15 СОМ. Затем сервер 15 СОМ определяет слагаемое ВПСПОН, соответствующее задержке, связанной с прохождением сигнала. Так как задержка, связанная с прохождением сигнала, связана с расстоянием (то есть расстояние = скорость × время), то можно вычислить расстояние между ПОб и каждым из активных узлов 30, что и выполняется при операции 230. Расстояние до каждого из, по меньшей мере, трех узлов используется для формирования круговых областей вокруг каждого из активных узлов 30, причем радиус каждой такой области равен расстоянию между ПОб и соответствующим активным узлом 30. Затем при операции 240 можно вычислить местоположение ПОб посредством определения точки пересечения данных круговых областей.
Операцию 210 измерения ВПСПОН можно выполнить с помощью кадра, специально передаваемого в составе передачи по НЛ для измерения ВПСПОН. В качестве альтернативы ВПСПОН можно измерить во время передачи по НЛ, выполняющейся в других целях, как, например, при передаче сигналов, связанных с выбором сотовой ячейки, повторным выбором сотовой ячейки и/или мониторингом сотовой ячейки, что служит уменьшению числа необходимых передач. Более того, ВПСПОН можно измерять периодически, причем для определения географического положения рассматриваемого ПОб используются самые последние результаты измерений ВПСПОН.
Если операция 210 включает периодические измерения ВПСПОН, то операция 220 передачи текущего значения разницы во времени в ПОб между приемом и передачей также можно выполнять периодически вместе с каждым измерением. В качестве альтернативы операция 220 передачи текущего значения разницы во времени в ПОб между приемом и передачей можно выполнять всякий раз, когда сервер 15 СОМ запрашивает данные о местоположении. В еще одном варианте осуществления операцию 220 можно выполнять каждый раз, когда ПОб меняет свое значение разницы во времени между приемом и передачей.
Кроме того, если для выполнения измерений ВПСПОН доступны только одна или две станции ППБС, то для определения местоположения ПОб можно использовать информацию об угле прихода (УП) сигнала. Информацию об УП можно получить с помощью измерений согласно описанию, приведенному в технической спецификации 3G TS 25.305, версия 3.1.0. Что касается сбора информации об УП, каждая ППБС обычно имеет несколько секторов, а каждая единица ПОб соединена с одним или несколькими секторами из списка активных секторов, так что ППБС может выполнить грубую оценку УП. Например, если ППБС имеет три сектора, то каждый из этих секторов имеет угол покрытия (охвата), равный 120 градусов, что в сумме составляет 360 градусов вокруг антенны. Использование интеллектуальной антенны может способствовать более точной оценке угла. Согласно Фиг.5 оценку 500 местоположения ПОб 20 можно вычислить с помощью полученного в результате измерений истинного значения ЗПСПОН, которое используется для определения радиуса 510 окружности вокруг ППБС 30, и результатов 520 измерений УП на ППБС 30. Точность оценки 500 местоположения, полученной с применением такого способа, зависит от точности результатов 520 измерений УП. На Фиг.6 показана оценка местоположения с использованием двух ППБС. Если две данных ППБС 30 используют только результаты измерений ЗПСПОН, то ПОб 20 может располагаться в одной из точек 500А и 500Б пересечения двух окружностей 510А и 510Б. Данные 520А и 520Б УП позволяют определить истинное местоположение ПОб. Изображенная на Фиг.6 ситуация, при которой две станции ППБС находятся в контакте с рассматриваемым ПОб, имеет место во время мягкой передачи обслуживания. Более того, в сетях ШМДКР мягкие передачи обслуживания происходят часто. Следовательно, в сетях ШМДКР оценка местоположения с использованием истинного значения ЗПСНОП и данных УП от двух ППБС может легко выполняться без увеличения графика.
Таким образом, невзирая на тот факт, что новые фундаментальные отличительные признаки настоящего изобретения были представлены, описаны и указаны в применении к его предпочтительному варианту осуществления, очевидно, что специалисты в данной области техники способны сделать различные опущения, подстановки и изменения в форме и деталях приведенных здесь устройств, а также в способе их функционирования без какого-либо отступления от сущности настоящего изобретения. Например, явно подразумевается, что все комбинации тех операций способа, которые для достижения одних и тех же результатов выполняют по сути одинаковые функции одним и тем же образом, находятся в рамках предметной области настоящего изобретения. Более того, следует считать, что структуры и/или элементы, и/или операции способа, показанные и/или описанные в связи с любой раскрытой формой или вариантом осуществления настоящего изобретения, могут на основании общего конструкционного решения включаться в любую другую раскрытую, описанную или предложенную форму или вариант осуществления изобретения. Таким образом, подразумевается, что настоящее изобретение ограничивается исключительно содержанием нижеследующей формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ В СИСТЕМЕ ЭЛЕКТРОСВЯЗИ | 2000 |
|
RU2263412C2 |
| Узел доступа для системы связи со сквозным формированием обратных лучей | 2016 |
|
RU2704119C1 |
| Узел доступа для системы связи со сквозным формированием прямых лучей | 2016 |
|
RU2704243C1 |
| Методики применения кластеров узлов доступа при сквозном формировании луча | 2017 |
|
RU2726179C1 |
| Методики применения кластеров узлов доступа при сквозном формировании луча | 2017 |
|
RU2737436C1 |
| СПОСОБЫ И УСТРОЙСТВО ДЛЯ ПОДДЕРЖКИ МЕЖЧАСТОТНЫХ ИЗМЕРЕНИЙ | 2011 |
|
RU2708961C2 |
| СПОСОБЫ И УСТРОЙСТВО ДЛЯ ПОДДЕРЖКИ МЕЖЧАСТОТНЫХ ИЗМЕРЕНИЙ | 2011 |
|
RU2579940C2 |
| МЕТОДИКИ ПРИМЕНЕНИЯ КЛАСТЕРОВ УЗЛОВ ДОСТУПА ПРИ СКВОЗНОМ ФОРМИРОВАНИИ ЛУЧА | 2017 |
|
RU2720492C2 |
| Методики применения кластеров узлов доступа при сквозном формировании луча | 2017 |
|
RU2729884C1 |
| Методики применения кластеров узлов доступа при сквозном формировании луча | 2017 |
|
RU2729604C1 |



Изобретение относится к области радиотехники и может использоваться для определения местоположения подвижных объектов с использованием измерения истинного времени прохождения сигнала в прямом и обратном направлениях в широкополосных сетях третьего поколения с МДКР. Способ вычисления задержки, связанной с прохождением сигнала в прямом и обратном направлениях для пользовательского оборудования в беспроводной сети, заключается в том, что а) измеряют время прохождения сигнала в прямом и обратном направлениях, б) измеряют посредством пользовательского оборудования разницу во времени в пользовательском оборудовании между приемом и передачей, включающую в себя разницу во времени между приемом пользовательским оборудованием сигнала, переданного по нисходящей линии связи, и передачей сигнала от пользовательского оборудования по восходящей линии связи, которая происходит в ответ на прием сигнала передачи по нисходящей линии связи в упомянутой операции а), и в) определяют задержку, связанную с прохождением сигнала в прямом и обратном направлениях между пользовательским оборудованием и узлом, посредством вычитания определенной при операции б) разницы во времени в пользовательском оборудовании между приемом и передачей из измеренного при операции а) времени прохождения сигнала в прямом и обратном направлениях. 3 н. и 30 з.п. ф-лы, 6 ил.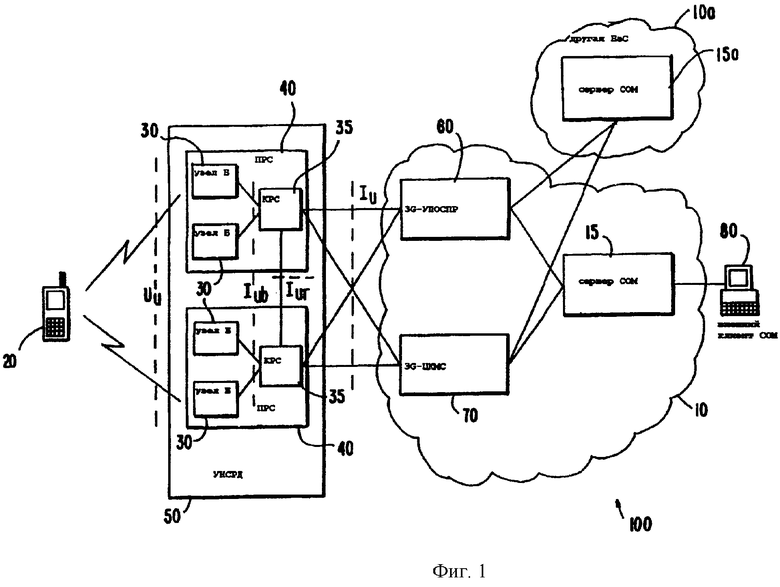
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| US 5945948 A, 31.08.1999 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ В СИСТЕМЕ РАДИОСВЯЗИ С МНОГОСТАНЦИОННЫМ ДОСТУПОМ С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1996 |
|
RU2127963C1 |

