Предлагаемый способ относится к контрольно-измерительной технике и может быть использован для текущего контроля за герметичностью магистральных трубопроводов и определения места течи в них.
Известны способы обнаружения места нарушения герметичности магистральных трубопроводов (авт. свид. СССР №№380909, 411268, 642575, 934269, 1216550, 1283566, 1610347, 1657988, 1672105, 1679232, 1705799, 1733837, 1777018, 1778597, 1812386; патент РФ №2190152; патенты США №№4289019, 4570477; патент Великобритании №1349120; патент Франции №2498325; патенты Японии №№5938533, 6024900; Трубопроводный транспорт нефти и газа. - М., 1988, с. 334, рис. 9.18).
Из известных способов наиболее близким к предлагаемому является "Способ определения местонахождения утечек в магистральных трубопроводах" (патент РФ №2190152, G 01 L 11/00, 2000), который и выбран в качестве прототипа.
Указанный способ основан на регистрации времени прихода двух ударных волн пониженного давления, образующихся в момент местного разрыва или повреждения трубопровода, на концы контролируемого участка трубопровода, нахождении разности времени прихода указанных волн и определении местоположения утечки.
Однако при значительной длине l контролируемого участка магистрального трубопровода нахождение разности времени прихода волн (t2-t1) на концы контролируемого участка за счет использования проводных средств вызывает определенные технические трудности.
Технической задачей изобретения является увеличение длины контролируемых участков магистрального трубопровода путем передачи времени прихода ударной волны пониженного давления, образующейся в момент местного разрыва или повреждения трубопровода, на один из концов контролируемого участка трубопровода по радиоканалу на другой конец контролируемого участка.
Поставленная задача решается тем, что в способе определения местонахождения утечек в магистральных трубопроводах, основанном на регистрации времени прихода двух ударных волн пониженного давления, образующихся в момент местного разрыва или повреждения трубопровода, на концы контролируемого участка трубопровода, генерировании высокочастотного колебания в момент местного разрыва или повреждения трубопровода, манипулировании его по фазе модулирующим кодом, содержащим сведения о номере аварийного участка трубопровода и местоположении участка, формируя тем самым тревожный сигнал с фазовой манипуляцией, усилении сформированного сигнала по мощности, излучении его в эфир, приеме на пункте контроля тревожного фазоманипулированного сигнала на три антенны, расположенные на одной линии, параллельной трубопроводу, в виде отрезка прямой, в центре которого помещают приемную антенну измерительного канала, общую для приемных антенн двух пеленгационных каналов, расположенных в азимутальной плоскости, образуя тем самым в данной плоскости две измерительные базы d и 2d, между которыми устанавливают неравенство
где λ - длина волны,
при этом меньшей базой d образуют грубую, но однозначную шкалу отсчета угла, а большей базой 2d образуют точную, но неоднозначную шкалу отсчета угла, преобразовании принимаемых сигналов по частоте, выделении напряжений первой промежуточной частоты, повторном преобразовании по частоте напряжения первой промежуточной частоты измерительного канала, выделении напряжения второй промежуточной частоты, перемножении его с напряжениями первой промежуточной частоты пеленгационных каналов, выделении из полученных напряжений гармонических колебаний на частоте второго гетеродина с сохранением фазовых соотношений, измерении разности фаз между гармоническими колебаниями и напряжением второго гетеродина и оценивании по ним значения азимута поврежденного участка трубопровода, ударные волны пониженного давления, образующиеся в момент местного разрыва или повреждения трубопровода и приходящиеся на концы контролируемого участка трубопровода, преобразуют в электрические сигналы, которые усиливают, фильтруют по частоте и преобразуют в цифровые коды, в момент местного разрыва или повреждения трубопровода на одном из концов контролируемого участка трубопровода генерируют высокочастотное колебание, манипулируют его по фазе цифровым кодом, формируя тем самым информационный сигнал с фазовой манипуляцией, усиливают сформированный сигнал по мощности, излучают его в эфир, принимают на другом конце контролируемого участка трубопровода информационный фазоманипулируемый сигнал, демодулируют его, выделяют цифровой код, осуществляют корреляционную обработку двух цифровых кодов, определяя тем самым разность времени прихода указанных волн и местоположение утечки, причем информационный и тревожный фазоманипулируемые сигналы формируют на разных несущих частотах.
Предлагаемый способ может быть реализован устройством, структурная схема которого представлена на фиг.1. Схема чувствительного элемента датчиков давления изображена на фиг.2. Временные диаграммы, поясняющие принцип действия способа и устройства, показаны на фиг.3. Принцип пеленгации поврежденного участка магистрального трубопровода фазовым методом иллюстрируется фиг.4. Структурная схема пункта контроля, размещаемого на транспортном средстве, представлена на фиг.5. Структурная схема пункта контроля, размещаемого на борту космического аппарата, представлена на фиг.7. Взаимное расположение приемных антенн на борту космического аппарата, самолета и вертолета показаны на фиг.6, 8, 9. Структурная схема пункта контроля, размещаемого на борту вертолета, представлена на фиг.10.
Устройство содержит место разрыва или повреждения трубопровода 1, две образовавшиеся волны пониженного давления 2.1, 2.2, датчики давления 3.1, 3.2, усилители-преобразователи 4.1, 4.2, управляющие блоки 5.1, 5.2 клапанов, клапаны-отсекатели 6.1, 6.2, ключи 8.1, 8.2, обмотки 7.1, 7.2 и контакты 9.1.1, 9.2.1 реле, источники питания 9.1, 9.2, вычислительный блок 10, передатчики 11, 76, формирователь кода 12, генератор 13 модулируемого кода, сумматор 14, генераторы 15, 77 высокой частоты, фазовые манипуляторы 16, 78, усилители 17, 79 мощности, передающие антенны 18, 80, усилители 73.1, 73.2, фильтры 74.1, 74.2, аналого-цифровые преобразователи 75.1, 75.2, приемную антенну 81, приемник 82, усилитель 83 высокой частоты, линию задержки 84, перемножитель 85, фильтр 86 нижних частот и коррелятор 87. Датчики 3.1, 3.2 давления устанавливаются в начале и конце контролируемого участка трубопровода. К выходу датчика 3.1 (3.2) давления последовательно подключены усилитель-преобразователь 4.1 (4.2), управляющий блок 5.1 (5.2) клапана и клапан-отсекатель 6.1 (6.2). К источнику питания 9.1 (9.2) последовательно подключены обмотка 7.1 (7.2) реле и ключ 8.1 (8.2), управляющий вход которого соединен с выходом усилителя-преобразователя 4.1 (4.2). К выходу датчика 3.1 (3.2) последовательно подключены усилитель 73.1 (73.2), фильтр 74.1 (74.2) и аналого-цифровой преобразователь 75.1 (75.2). К выходу генератора 77 высокой частоты последовательно подключены фазовый манипулятор 78, второй вход которого соединен с выходом аналого-цифрового преобразователя 75.2, усилитель мощности 79 и передающая антенна 80. К выходу приемной антенны 81 последовательно подключены усилитель 83 высокой частоты, линия задержки 84, перемножитель 85, второй вход которого соединен с выходом усилителя 83 высокой частоты, фильтр 86 нижних частот, коррелятор 87, второй вход которого соединен с выходом аналого-цифрового преобразователя 75.1, вычислительный блок 10, формирователь кода 12, сумматор 14, второй вход которого соединен с выходом генератора 13 модулирующего кода, фазовый манипулятор 16, второй вход которого соединен с выходом генератора 15 высокой частоты, усилитель 17 мощности и передающая антенна 18. Питание передатчиков 11, 76 и приемника 82 обеспечивается через контакты 9.1.1 и 9.2.1.
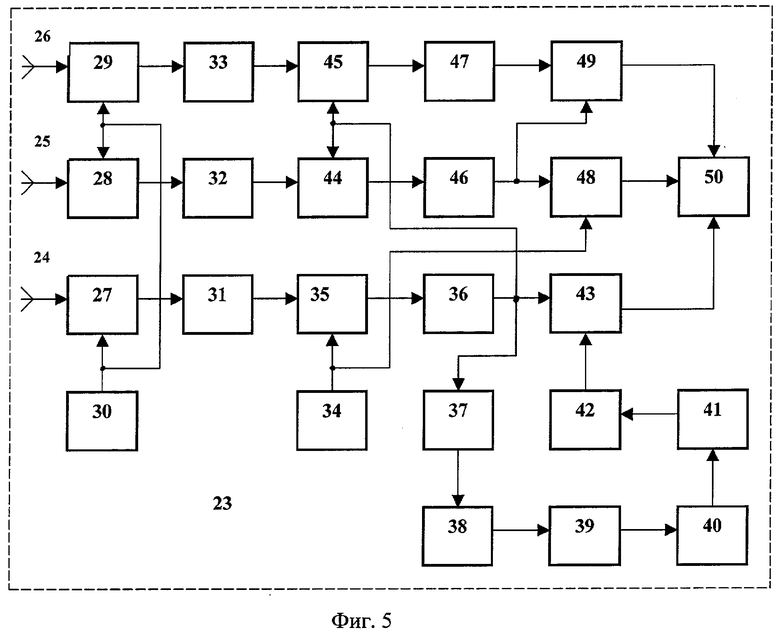
Пункт контроля 23, содержит измерительный канал и два пеленгационных канала. Измерительный канал состоит из последовательно включенных приемной антенны 24, смесителя 27, второй вход которого соединен с выходом гетеродина 30, усилитель 31 первой промежуточной частоты, смеситель 35, второй вход которого соединен с выходом гетеродина 34, усилитель 36 второй промежуточной частоты, удвоитель 37 фазы, узкополосный фильтр 38, делитель 39 фазы на два, частотный детектор 40, триггер 41, балансный переключатель 42, второй вход которого соединен с выходом делителя 39 фазы на два, фазовый детектор и блок 50 регистрации.
Каждый пеленгационный канал состоит из последовательно включенных приемной антенны 25(26), смесителя 28(29), второй вход которого соединен с выходом гетеродина 30, усилителя 32(33) первой промежуточной частоты, перемножителя 44(45), второй вход которого соединен с выходом усилителя 36 второй промежуточной частоты, узкополосного фильтра 46 (47), и фазового детектора 48(49), второй вход которого соединен с выходом гетеродина 34 (узкополосного фильтра 46), выход которого подключен к блоку 50 регистрации.
Устройство, реализующее предлагаемый способ, работает следующим образом.
В момент местного разрыва или повреждения трубопровода образуется ударная волна пониженного давления. От места разрыва l в противоположных направлениях движутся две волны 2 со скоростью С распространения звука в среде. Схема чувствительного элемента датчика давления, измеряющего весьма малые высокочастотные возмущения давления (0,1...0,001 МПа) на фоне значительных, медленно изменяющихся давлений (3...7,5 МПа), изображена на фиг.2, где введены следующие обозначения: 19 - корпус, 20 - входные патрубки, 21 - демпфер, 22 - мембрана.
Сигнал из трубопровода в месте измерения подается одновременно на два входных канала чувствительного элемента, т.е. одно и то же давление действует на мембрану с двух сторон. В одном из каналов имеется многоканальная или резьбовая демпфирующая вставка, которая гасит высокочастотные колебания давления, т.е. является низкочастотным фильтром. При такой схеме включения прибора мембрана будет реагировать только на измеряемую величину, поскольку медленно меняющийся большой фон компенсируется. В усилителе-преобразователе показания прибора преобразуются в электрический сигнал, который интегрируется, и результат сравнивается с известным пороговым значением. В качестве преобразователей используются емкостные или тензометрические датчики.
Виброакустические сигналы, возбуждаемые течью, распространяются вдоль трубопровода в обоих направлениях и воспринимаются датчиками 3.1 и 3.2, с выходов которых электрические сигналы поступают на усилители 73.1 и 73.2 соответственно. С помощью фильтров 74.1 и 74.2 производится выделение рабочей полосы частот, оптимальное значение которой определяется параметрами трубопровода и помеховой обстановкой. Аналого-цифровые преобразователи 75.1 и 75.2 преобразуют входные сигналы в цифровые коды. С выхода первого аналого-цифрового преобразователя 75.1 цифровой код поступает на первый вход коррелятора 87.
При превышении порогового значения в усилителях-преобразователях 4.1 и 4.2 формируются постоянные напряжения, которые поступают на входы управляющих блоков 5.1 и 5.2 клапанов и на управляющие входы ключей 8.1 и 8.2 соответственно. В исходном состоянии ключи 8.1 и 8.2 всегда закрыты. При этом управляющие блоки 5.1 и 5.2 включают клапаны-отсекатели 6.1 и 6.2 соответственно, а обмотки 7.1 и 7.2 реле через открытые ключи 8.1 и 8.2 замыкаются на землю, реле срабатывают и замыкают контакты 9.1.1 и 9.2.1, через которые напряжение питания подается на передатчик 11, приемник 82 и передатчик 76.
После включения передатчика 76 высокочастотное колебание
uи(t)=Uиcos(ωиt+ϕи), 0≤t≤Tи,
где Uи, ωи, ϕи - амплитуда, несущая частота и начальная фаза высокочастотного колебания;
с выхода задающего генератора 77 поступает на первый вход фазового манипулятора 78, на второй вход которого подается цифровой код с выхода аналого-цифрового преобразователя 75.2. В результате фазовой манипуляции на выходе фазового манипулятора 78 образуется фазоманипулированный (ФМн) сигнал
u'и(t)=Uиcos[ωиt+ϕки(t)+ϕи], 0≤t≤Tи,
где ϕки{0, π} - манипулируемая составляющая фазы, который после усиления в усилителе 79 мощности излучается передающей антенной 80 в эфире.
На другом конце контролируемого участка трубопровода данный сигнал улавливается приемной антенной 81 и через усилитель 83 высокой частоты поступает на первый вход перемножителя 85 и на вход линии задержки 84. На выходе линии задержки 84 образуется ФМн-сигнал
u''и(t)=Uиcos[ωи(t-τз)+ϕки(t-τз]+ϕи], 0≤t≤Tи,
где τз=τэ,
который поступает на второй вход перемножителя 85. Перемножитель 85 и фильтр 86 нижних частот образуют фазовый детектор, который вместе с линией задержки 84 образуют демодулятор. Причем для каждой последующей элементарной посылки опорным напряжением служит предыдущая элементарная посылка. Так как время задержки τз выбрано равным длительности элементарных посылок τз(τз=τэ), демодулятор, построенный по такой схеме, свободен от явления "обратной работы". На выходе фильтра 86 нижних частот выделяется цифровой код, который поступает на второй вход коррелятора, 8 7. Последний определяет разность времени прихода ударных волн пониженного давления, образующихся в момент местного разрыва или повреждения трубопровода, на концы контролируемого участка трубопровода (t2-t1).
Определив разность времени прихода волн (t2-t1) на концы контролируемого участка протяженностью 1 (фиг.1), в вычислительном блоке 10 определяется местоположение участка:

где Vcp - средняя скорость движения транспортируемого продукта (вода, нефть, газ и т.п.).
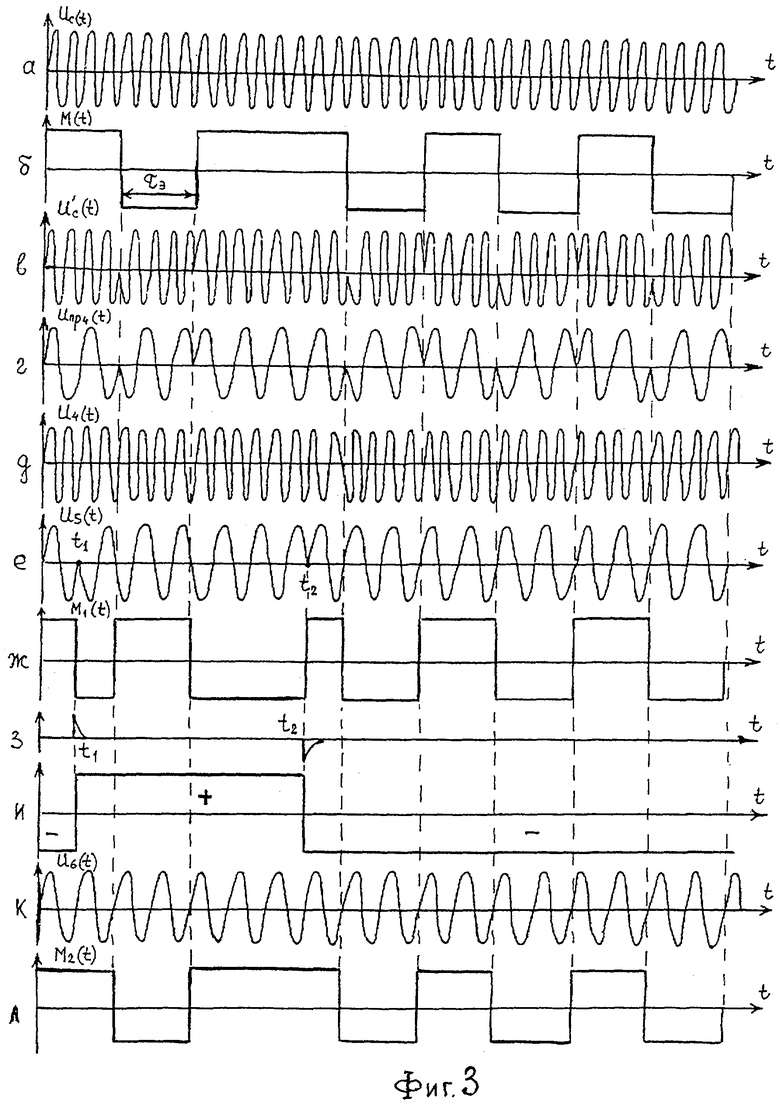
После включения передатчика 11 высокочастотное колебание (фиг.3,а)
uс(t)=Uсcos(ωсt+ϕс), 0≤t≤Tс,
где Uc, ωс, ϕс - амплитуда, несущая частота и начальная фаза высокочастотного колебания;
с выхода задающего генератора 15 поступает на первый вход фазового манипулятора 16.
Место разрыва Хо трубопровода в формирователе 12 кода преобразуется в соответствующий код, состоящий из m элементарных посылок. Генератор 13 формирует код, состоящий из n элементарных посылок, количество которых отражает номер контролируемого участка трубопровода. Указанные элементарные посылки суммируются в сумматоре 14(N=n+m)и образуют модулирующий код M(t) (фиг.3,б), который поступает на второй вход фазового манипулятора 16. В результате фазовой манипуляции на выходе фазового манипулятора 16 образуется фазоманипулированный (ФМн) сигнал (фиг.3,в)
uс'(t)=Uccos[ωct+ϕk(t)+ϕc], 0≤t≤Tc,
где ϕk(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t), причем ϕк(t)=const при kτэ<t<(k+1)τэ и может изменяться скачком при t=kτэ, т.е. на границах между элементарными посылками (k=0, 1, 2,..., N-1);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тc(Тc=N τэ).
Этот сигнал после усиления в усилителе 17 мощности излучается передающей антенной 18 в эфир.
На пункте контроля 23, размещенном на транспортном средстве, принимают ФМн-сигналы с нестабильной несущей частотой на три приемные антенны 24-26:
u1(t)=U1cos[(ωc±Δω)t+ϕk(t)+ϕ1];
u2(t)=U1cos[(ωc±Δω)t+ϕk(t)+ϕ2];
u3(t)=U3cos[(ωc±Δω)t+ϕk(t)+ϕ3], 0≤t≤Tc,
где ±Δω - нестабильность несущей частоты, вызванная различными дестабилизирующими факторами;
которые поступают на первые входы смесителей 27-29, на вторые входы которых подается напряжение гетеродина 30
uг1(t)=Uг1 cos(ωг1t + ϕг1).
На выходе смесителей 27-29 образуются напряжения комбинационных частот. Усилителями 31-33 выделяются напряжения первой промежуточной частоты:
uпр1(t)=Uпр1cos[(ωпр1±Δω)t+ϕk(t)+ϕпр1];
uпр2(t)=Uпр2cos[(ωпр1±Δω)t+ϕk(t)+ϕпр2];
uпр3(t)=Uпр3cos[(ωпр1±Δω)t+ϕk(t)+ϕпр3]; 0≤t≤T,
где  ; ϕпр1=ϕ1-ϕг1; ωпр1=ωс-ωг1 - первая промежуточная частота;
; ϕпр1=ϕ1-ϕг1; ωпр1=ωс-ωг1 - первая промежуточная частота;
 ; ϕпр2=ϕ2-ϕг1;
; ϕпр2=ϕ2-ϕг1;
 ϕпр3=ϕ3-ϕг1;
ϕпр3=ϕ3-ϕг1;
К1 - коэффициент передачи смесителей.
В измерительном канале напряжение uпр1(t) с выхода усилителя 31 первой промежуточной частоты поступает на первый вход смесителя 35, на второй вход которого подается напряжение гетеродина 34
uг2(t)=Uг2cos(ωг2t+ϕг2).
На выходе смесителя 35 образуются напряжения комбинационных частот. Усилителем 36 выделяется напряжение второй промежуточной частоты (фиг.3,г)
uпр4(t)=Uпр4cos[(ωпр2±ω)t+ϕk(t)+ϕпр4]; 0≤t≤Tс,
где  ωпр2=ωпр1-ωг2 - вторая промежуточная частота; ϕпр4=ϕпр1-ϕг1.
ωпр2=ωпр1-ωг2 - вторая промежуточная частота; ϕпр4=ϕпр1-ϕг1.
Это напряжение поступает на первый вход фазового детектора 43 и на вход удвоителя 37 фазы. Так как 2ϕк(t)={0,2π}, то в выходном напряжении удвоителя 37 фазы (фиг.3,д)
u4(t)=Uпр4cos2[(ωпр2±Δω)t+ϕпр4]
манипуляция фазы уже отсутствует. Это напряжение выделяется узкополосным фильтром 38, а затем делится по фазе на два в делителе фазы 39 (фиг.3,е)
u5(t)=Uпр4cos[(ωпр2±Δω)t+ϕпр4].
Начальная фаза полученного напряжения может иметь два устойчивых значения ϕпр4 и ϕпр4 +π. Это легко показать аналитически. Если произвести деление, аналогичное предыдущему, но предварительно добавив к аргументу угол 2π, что не изменяет исходного напряжения, то после деления на два получится напряжение, сдвинутое по фазе на π:

Следовательно, двузначность фазы полученного напряжения вытекает из самого процесса деления. Физически указанная двузначность фазы объясняется неустойчивой работой делителя 39 фазы на два. Это явление "обратной работы" присуще всем устройствам (Пистолькорса А.А., Сифорова В.И., Костаса Д.Ф., Травина Г.А.), которые выделяют опорное напряжение, необходимое для синхронного детектирования ФМн-сигналов, непосредственно из принимаемого ФМн-сигнала.
Явление "обратной работы" обусловлено скачкообразными переходами фазы опорного напряжения из одного состояния ϕпр4 в другое ϕпр4+π под действием помех, кратковременного прекращения приема и других факторов. Эти переходы за время приема ФМн-сигнала происходят в случайные моменты времени (например, t1, t2) (фиг.3,е). При этом на выходе фазового детектора 43 выделяется искаженный аналог модулирующего кода M1(t) (фиг.3,ж), что значительно снижает достоверность приема информации, содержащейся в модулирующем коде M(t) (фиг.3,б).
Для стабилизации фазы опорного напряжения и устранения явления "обратной работы" используются частотный детектор 40, триггер 41 и балансный переключатель 42.
При скачкообразном изменении фазы опорного напряжения на +180° в момент времени t1 (фиг.3,е) на выходе частотного детектора 40 появляется положительный короткий импульс, а при скачке фазы на -180° в момент времени t2 (возвращение фазы опорного напряжения в первоначальное состояние) - отрицательный импульс (фиг.3,з). Знакочередующие импульсы с выхода частотного детектора 40 управляют работой триггера 41, выходное напряжение которого (фиг.3,и), в свою очередь, управляет работой балансного переключателя 42.
В устойчивом состоянии, когда фаза опорного напряжения совпадает, например, с нулевой фазой принимаемого ФМн-сигнала, на выходе триггера 41 образуется отрицательное напряжение и балансный переключатель находится в своем первоначальном положении, при котором опорное напряжение поступает с выхода делителя 39 фазы на опорный вход фазового детектора 43 без изменения.
При скачкообразном изменении фазы опорного напряжения на +180°, обусловленным, например, неустойчивой работой делителя 39 фазы под действием помех, триггер 41 положительным импульсом с выхода частотного детектора 40 переводится в другое устойчивое состояние. При этом выходное напряжение триггера 40 в момент времени t1 становится и остается положительным до очередного скачка фазы в момент времени t2, который возвращает фазу опорного напряжения в первоначальное состояние. Положительное выходное напряжение триггера 40 переводит балансный переключатель 42 в другое устойчивое состояние, при котором опорное напряжение с выхода делителя 39 фазы поступает на опорный вход фазового детектора 43 с изменением фазы на -180°. Это позволяет устранить нестабильность фазы опорного напряжения и связанную с ней "обратную работу".
Следовательно, частотный детектор 40 обеспечивает обнаружение момента возникновения "обратной работы", а триггер 41 и балансный переключатель 42 устраняют ее.
При этом на опорный вход фазового детектора 43 поступает опорное напряжение со стабильной фазой (фиг.3,к)
u6(t)=Uпр4cos[(ωпр2±Δω)t+ϕпр4].
На выходе фазового детектора 43 образуется низкочастотное напряжение (фиг.3, л)
uн(t)=Uн cos ϕk (t),
где 
К2 - коэффициент передачи фазового детектора;
пропорциональное модулирующему коду M2(t).
Одновременно напряжение второй промежуточной частоты Uпр4(t) с выхода усилителя 36 второй промежуточной частоты поступает на вторые входы перемножителей 44 и 45, на первые входы которых подаются напряжения Uпр2(t) и Uпр3(t) с выходов усилителей 32 и 33 первой промежуточной частоты соответственно. На выходах перемножителей 44 и 45 образуются гармонические колебания:
u7(t)=U7cos(ωг2t+ϕг2+Δϕ1),
u8(t)=U8cos(ωг2t+ϕг2-Δϕ2),
где 
К3 - коэффициент передачи перемножителей;


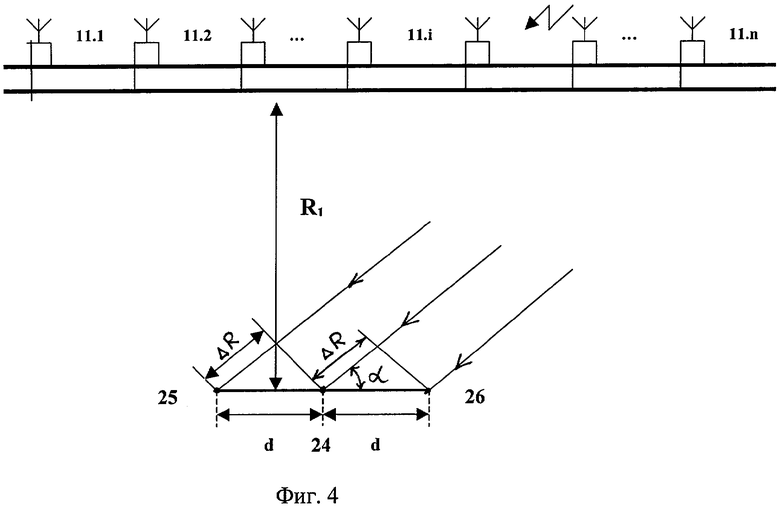
α - азимут поврежденного участка магистрального трубопровода (фиг.4);
которые выделяются узкополосными фильтрами 46, 47 и поступают на первые входы фазовых детекторов 48, 49 соответственно. На второй вход фазового детектора 48 подается напряжение uг2(t) гетеродина 34, на второй вход фазового детектора49 подается гармоническое колебание u8(t) с выхода узкополосного фильтра 46.
Знаки "+" и "-" перед фазовыми сдвигами Δϕ1 и Δϕ2 соответствуют диаметрально противоположным положениям приемных антенн 25 и 26 относительно антенны 24. На выходах фазовых детекторов 48 и 49 образуются постоянные напряжения:
uн1(α)=Uн1 cos Δϕ1,
uн2(α)=Uн2 cos Δϕ3,
где 

которые фиксируются блоком 50 регистрации.
Приемные антенны 24...26 размещают таким образом, что измерительные базы образуют отрезок прямой, в центре которого помещают приемную антенну 24 измерительного канала (фиг.4). При этом меньшей базой d образуют грубую, но однозначную шкалу пеленгации, а большей базой 2d - точную, но неоднозначную шкалу пеленгации:

Так предлагается использовать фазовый метод пеленгации поврежденного участка магистрального трубопровода с помощью трех приемных антенн, расположенных на пункте приема, в виде отрезка прямой, параллельной магистральному трубопроводу на некотором расстоянии R1 от него.
Зная расстояние R1 и измерив угловую координату α, можно точно и однозначно определить координаты поврежденного участка магистрального трубопровода. Данные сведения уточняются модулирующим кодом M(t), который выделяется из принимаемого ФМн-сигнала путем его синхронного детектирования. В модулирующем коде M(t) содержится информация о номере поврежденного участка магистрального трубопровода и местоположении повреждения участка.
Предлагаемое устройство инвариантно к нестабильности несущей частоты и виду модуляции (манипуляции) принимаемых сигналов, так как пеленгацию поврежденного участка магистрального трубопровода осуществляют на стабильной частоте ωг2 второго гетеродина 34. Предлагаемое устройство позволяет регистрировать аварийные участки транспортируемого продукта весьма малой величины (менее 1%) вдоль участков магистральных трубопроводов протяженностью от нескольких сот метров до нескольких километров с точностью не ниже 0,1% (неопределенность Δх<30 м).
Описанная выше работа предлагаемого устройства соответствует случаю размещения пункта приема на транспортном средстве, например на автомобиле, находящемся на некотором расстоянии от магистрального трубопровода.
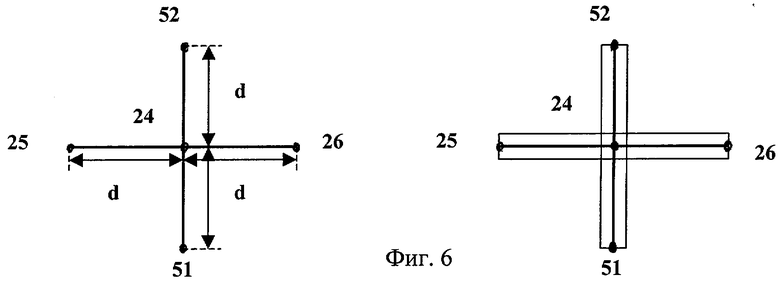
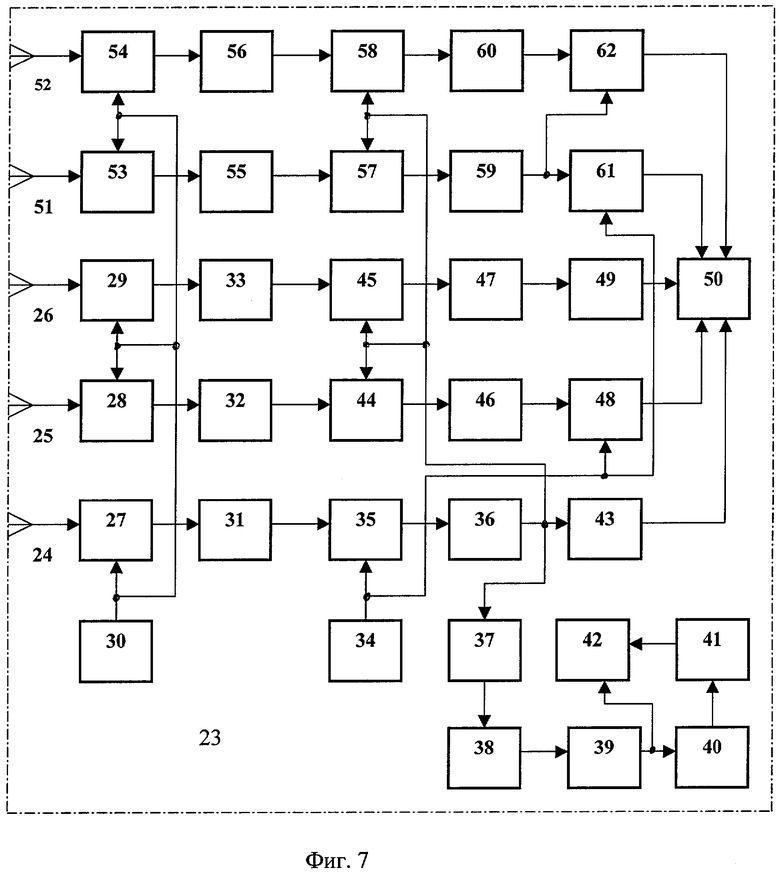
Для контроля протяженных магистральных трубопроводов пункт контроля размещают на борту космического аппарата, проекцию траектории полета которого располагают вблизи магистрального трубопровода параллельно ему. Причем приемные антенны располагают на концах специальных панелей в виде геометрического креста, в пересечении которого помещают приемную антенну 24 измерительного канала, общую для приемных антенн 25 и 26, 51 и 52 пеленгационных каналов, расположенных в азимутальной (горизонтальной) и угломестной (вертикальной) плоскостях, по два на каждую плоскость, образуя тем самым в каждой плоскости две измерительные базы d и 2d, между которыми устанавливают неравенство

где λ - длина волны,
при этом меньшие базы d образуют грубые, но однозначные шкалы отсчета углов α и β, а большие базы 2d образуют точные, но неоднозначные шкалы отсчета углов α и β,
где α - азимут места повреждения магистрального трубопровода,
β - угол места повреждения магистрального трубопровода (фиг.6).
При этом дополнительные два пеленгационных канала, каждый из которых состоит из последовательно включенных приемной антенны 51 (52), смесителя 53(54), второй вход которого соединен с выходом гетеродина 30, усилителя 55(56) первой промежуточной частоты, перемножителя 57(58), второй вход которого соединен с выходом усилителя 36 второй промежуточной частоты, узкополосного фильтра 59(60) и фазового детектора 61(62), второй вход которого соединен с выходом гетеродина 34 (узкополосного фильтра 59), а выход подключен к блоку 50 регистрации, обеспечивают точное и однозначное определение угла места β поврежденного участка магистрального трубопровода и работают также как два пеленгационных канала в азимутальной плоскости (фиг.7). В этом случае блоком 50 регистрации фиксируются манипулирующий код M(t), азимут α и угол места β поврежденного участка магистрального трубопровода.
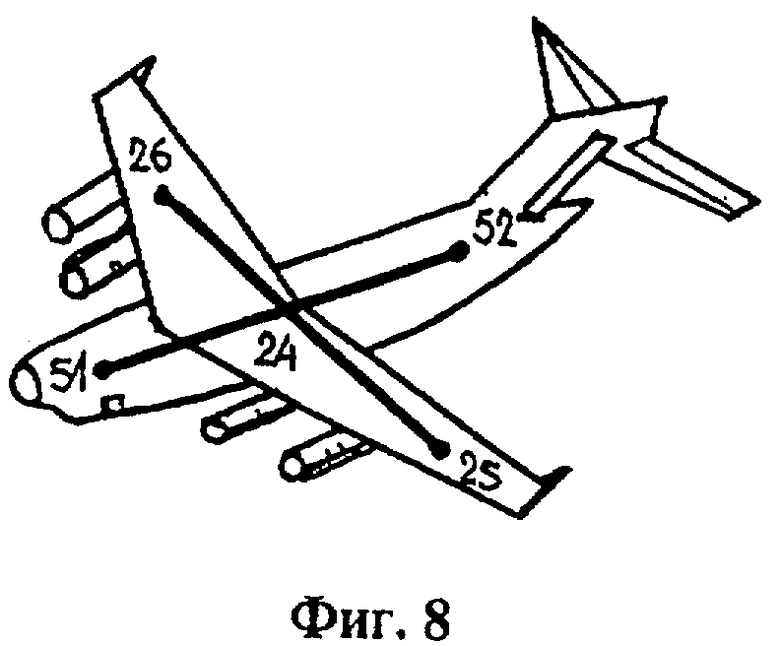
Для контроля протяженных магистральных трубопроводов пункт контроля размещают на борту самолета, пролетающего над магистральным трубопроводом. Причем четыре приемные антенны 25 и 26, 51 и 52 располагают на концах фюзеляжа и крыльев в виде геометрического креста, в пересечении которого помещают приемную антенну 24 измерительного канала (фиг.8). Состав и работа, измерительного и четырех пеленгационных каналов те же, что и для космического аппарата (фиг.7).
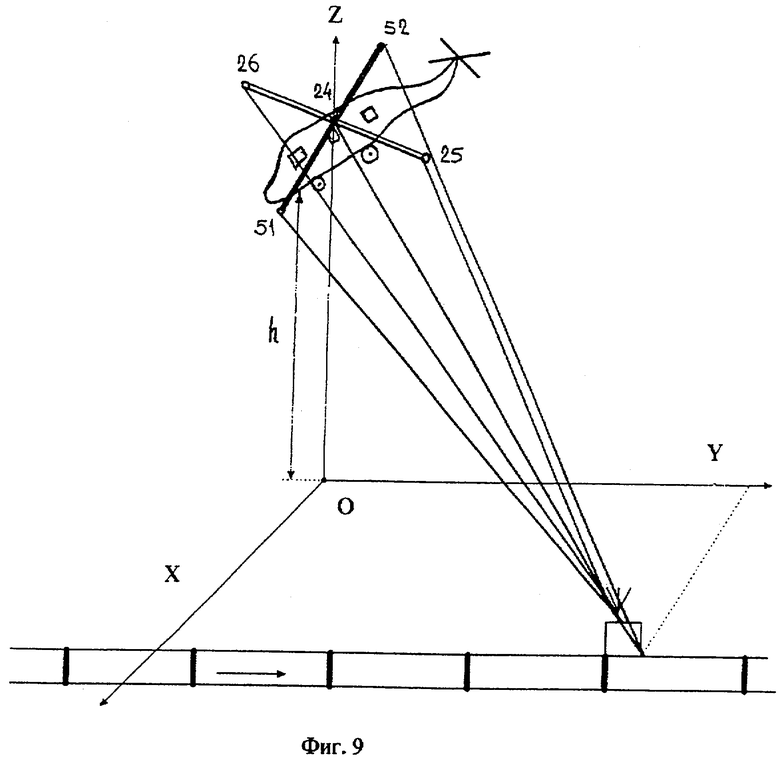
Для контроля протяженных магистральных трубопроводов пункт контроля располагают на борту вертолета, пролетающего над магистральным трубопроводом. Решение данной задачи требует высокоточной координатометрии, что применительно к вертолету имеет свои особенности. Наличие вращающихся винтов может быть использовано как положительный фактор для определения направления на источник излучения ФМн-сигнала (поврежденный участок магистрального трубопровода) с помощью пеленгационного устройства, четыре приемные антенны 25 и 26, 51 и 52 которого расположены на концах четырех лопастей несущего винта, а приемная антенна 24 измерительного канала размещена над втулкой винта (фиг.9).
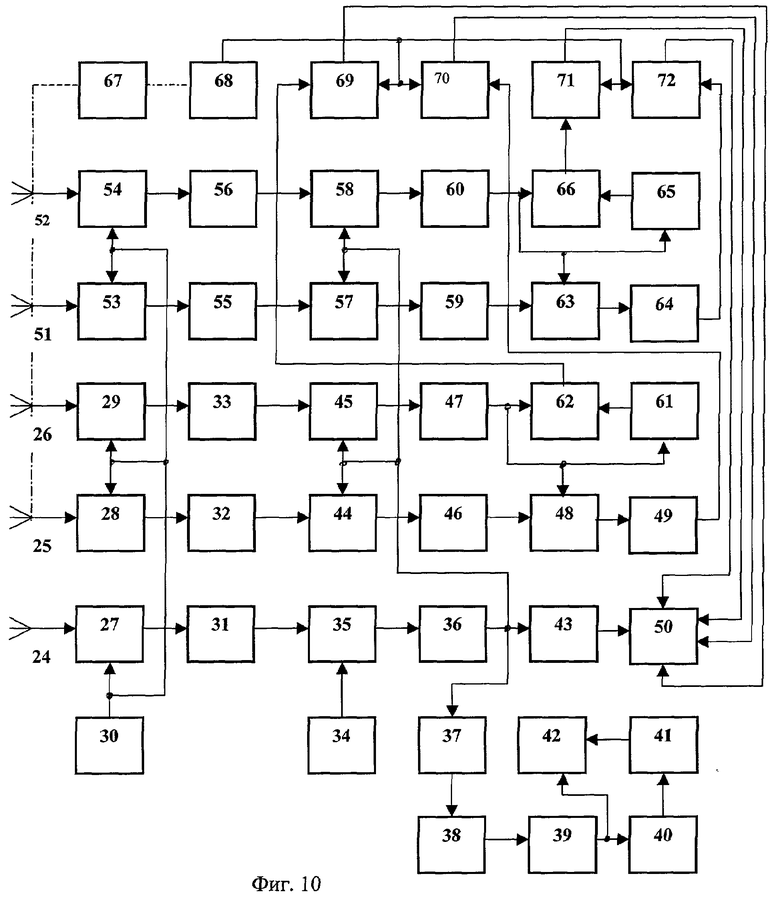
Пеленгационные каналы в этом случае имеют следующие отличия: к выходу узкополосного фильтра 46(59) последовательно подключены перемножитель 48(63), второй вход которого соединен с выходом узкополосного фильтра 47(60), узкополосный фильтр 49(64) и фазометр 70(72), второй вход которого соединен с выходом опорного генератора 68, а выход подключен к блоку 50 регистрации. К выходу узкополосного фильтра 47(60) последовательно подключены линия задержки 61(65), фазовый детектор 62(66) и фазометр 69(71), второй вход которого соединен с выходом опорного генератора 68, а выход подключен к блоку 50 регистрации. Двигатель 67 кинетически связан с винтом вертолета и опорным генератором 68 (фиг.10).
Пеленгацию источника излучения ФМн-сигнала (поврежденного участка магистрального трубопровода) в двух плоскостях осуществляют дифференциально-фазовым методом с использованием обусловленной эффектом Доплера фазовой модуляцией, возникающей при круговом вращении приемных антенн 25 и 26, 51 и 52 вокруг приемной антенны 24.
В этом случае принимаемые антеннами 24, 25, 26, 51 и 52 ФМн-сигналы:
u9(t)=U9cos[(ωс±Δω)t+ϕk(t)+ϕ1];




где R - радиус окружности, на которой расположены приемные антенны 25, 26, 51 и 52 (длина лопастей винта вертолета); Ω - скорость вращения винта вертолета;
преобразуются по частоте, перемножаются и узкополосными фильтрами 46, 47, 59 и 60 выделяются следующие напряжения:




Эти напряжения обрабатываются двумя автокорреляторами, каждый из которых состоит из фазового детектора 62(66) и линии задержки 61(65), что способствует уменьшению индекса фазовой модуляции  и устранению неоднозначности отсчета углов α и β.
и устранению неоднозначности отсчета углов α и β.
На выходе автокорреляторов образуются напряжения:
u18 (t)=U18 cos( Ωt-α);
u19 (t)=U19 cos( Ωt-β);
которые поступают на первые входы фазометров 69 и 70, на вторые входы которых подается напряжение опорного генератора 68
Uo(t)=Uo cos Ωt.
Измеренные фазометрами 69 и 70 угловые координаты фиксируются блоком 50 регистрации.
Таким образом, предлагаемый способ по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает не только расширение функциональных возможностей за счет передачи по радиоканалу тревожного сигнала о месте возникновения утечек в магистральных трубопроводах на пункт контроля, но и увеличение длины контролируемых участков магистральных трубопроводов путем передачи времени прихода ударных волн пониженного давления, образующихся в момент местного разрыва или повреждения трубопровода, на один из концов контролируемого участка трубопровода по радиоканалу на другой конец контролируемого участка. При этом в качестве тревожного и информационного сигналов используются сложные сигналы с фазовой манипуляцией, что позволяет применять новый вид селекции - структурную селекцию. Это значит, что появляется новая возможность разделять сигналы, действующие в одной и той же полосе частот и в одни и те же промежутки времени. Принципиально можно отказаться от традиционного метода разделения рабочих частот используемого диапазона между работающими радиоканалами и селекцией их на приемной стороне с помощью частотных фильтров. Его можно заменить новым методом, основанным на одновременной работе каждого радиоканала во всем диапазоне частот сигналами с фазовой манипуляцией с выделением приемником сигнала необходимого радиоканала посредством его структурной селекции. Использование радиоканалов на базе сложных ФМн-сигналов позволяет осуществлять уверенный прием информации при наличии весьма мощных местных узкополосных сигналов и помех в полосе пропускания приемников. Таким путем решается задача, с которой метод частотной селекции принципиально не может справиться.
С точки зрения обнаружения сложные сигналы с фазовой манипуляцией обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого ФМн-сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия ФМн-сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку ФМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемников.
Для выделения модулирующего кода M(t) из принимаемого ФМн-сигнала используется его синхронное детектирование на пункте контроля. Причем опорное напряжение, необходимое для синхронного детектирования ФМн-сигнала, выделяется непосредственно из принимаемого ФМн-сигнала, а возникающее при этом явление "обратной работы" устраняется методом стабилизации начальной фазы опорного напряжения.
Для синхронного детектирования принимаемого ФМн-сигнала на концах контролируемого участка магистрального трубопровода используется метод относительной фазовой манипуляции, который свободен от явления "обратной работы".
Для контроля протяженных магистральных трубопроводов пункт контроля размещают на летательном аппарате (космическом аппарате, самолете или вертолете).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УТЕЧЕК В МАГИСТРАЛЬНЫХ ТРУБОПРОВОДАХ | 2002 |
|
RU2233402C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УТЕЧЕК В МАГИСТРАЛЬНЫХ ТРУБОПРОВОДАХ | 2000 |
|
RU2190152C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УТЕЧЕК В МАГИСТРАЛЬНЫХ ТРУБОПРОВОДАХ, ПРЕИМУЩЕСТВЕННО НЕФТЕПРОВОДАХ | 2002 |
|
RU2234637C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ПРОТИВОТРАНСПОРТНЫХ МИН | 2004 |
|
RU2273885C1 |
| СПАСАТЕЛЬНАЯ СИСТЕМА | 2007 |
|
RU2339972C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2007 |
|
RU2346290C1 |
| АКУСТООПТИЧЕСКИЙ ПРИЕМНИК | 2005 |
|
RU2291575C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2012 |
|
RU2514131C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ТЕЧИ В НАПОРНОМ ТРУБОПРОВОДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263887C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УТЕЧЕК В МАГИСТРАЛЬНЫХ ТРУБОПРОВОДАХ | 2006 |
|
RU2302584C1 |

Способ относится к контрольно-измерительной технике и может быть использован для текущего контроля за герметичностью магистральных трубопроводов и определения места течи в них. Техническим результатом изобретения является увеличение длины контролируемых участков магистрального трубопровода путем передачи времени прихода ударных волн пониженного давления, образующихся в момент местного разрыва или повреждения трубопровода, на один из концов контролируемого участка трубопровода по радиоканалу на другой конец контролируемого участка. В способе ударные волны пониженного давления, образующиеся в момент местного разрыва или повреждения трубопровода и приходящиеся на концы контролируемого участка трубопровода, преобразуют в электрические сигналы, которые усиливают, фильтруют и преобразуют в цифровые коды, в момент местного разрыва или повреждения трубопровода на одном из концов контролируемого участка трубопровода генерируют высокочастотное колебание, манипулируют его по фазе цифровым кодом, формируя тем самым информационный сигнал с фазовой манипуляцией, усиливают сформулированный сигнал по мощности, излучают его в эфир, принимают на другом конце контролируемого участка трубопровода информационный фазоманипулируемый сигнал, демодулируют его, выделяя цифровой код, осуществляют корреляционную обработку двух цифровых кодов, определяя тем самым разность времени прихода указанных волн и местоположение утечки, причем информационный и тревожный фазоманипулируемые сигналы формируют на разных несущих частотах. 10 ил.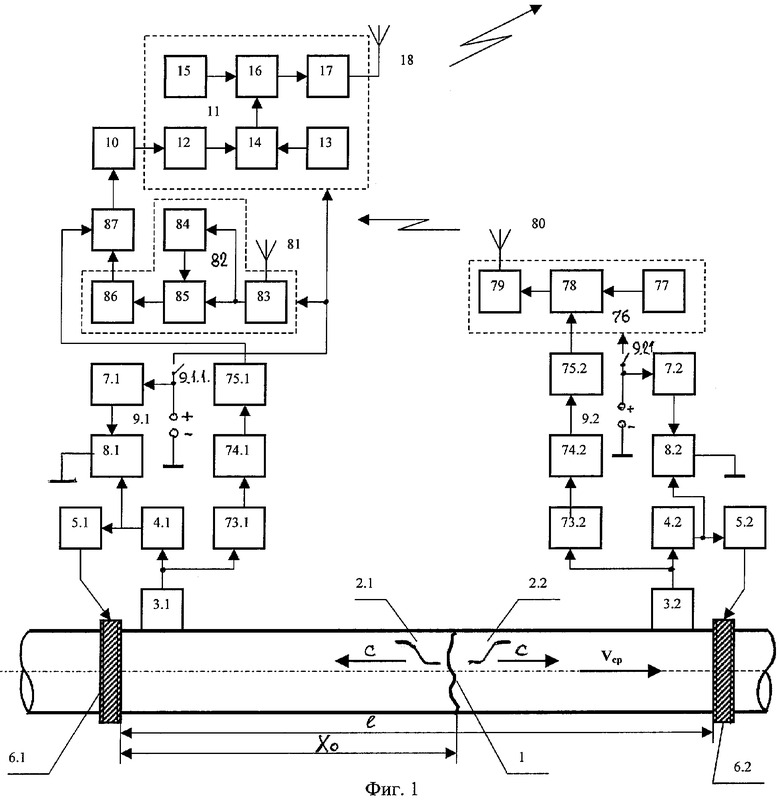
Способ определения местонахождения утечек в магистральных трубопроводах, основанный на регистрации времени прихода двух ударных волн пониженного давления, образующихся в момент местного разрыва или повреждения трубопровода, на концы контролируемого участка трубопровода, генерировании высокочастотного колебания в момент местного разрыва или повреждения трубопровода, манипулировании его по фазе модулирующим кодом, содержащим сведения о номере аварийного участка трубопровода и местонахождении утечки, формируя тем самым тревожный сигнал с фазовой манипуляцией, усилении сформированного сигнала по мощности, излучении его в эфир, приеме на пункте контроля тревожного фазоманипулированного сигнала на три антенны, расположенные на одной линии, параллельной трубопроводу, в виде отрезка прямой, в центре которого помещают приемную антенну измерительного канала, общую для приемных антенн двух пеленгационных каналов, расположенных в азимутальной плоскости, образуя тем самым в данной плоскости две измерительные базы d и 2d, между которыми устанавливают неравенство

где λ - длина волны,
при этом меньшей базой d образуют грубую, но однозначную шкалу отсчета угла, а большей базой 2d образуют точную, но неоднозначную шкалу отсчета угла, преобразовании принимаемых сигналов по частоте, выделении напряжений первой промежуточной частоты, повторном преобразовании по частоте напряжения первой промежуточной частоты измерительного канала, выделении напряжения второй промежуточной частоты, перемножении его с напряжениями первой промежуточной частоты пеленгационных каналов, выделении из полученных напряжений гармонических колебаний на частоте второго гетеродина с сохранением фазовых соотношений, измерении разности фаз между гармоническими колебаниями и напряжением второго гетеродина и оценивании по ним значения азимута поврежденного участка трубопровода, отличающийся тем, что ударные волны пониженного давления, образующиеся в момент местного разрыва или повреждения трубопровода и приходящиеся на концы контролируемого участка трубопровода, преобразуют в электрические сигналы, которые усиливают, фильтруют и преобразуют в цифровые коды, в момент местного разрыва или повреждения трубопровода на одном из концов контролируемого участка трубопровода генерируют высокочастотное колебание, манипулируют его по фазе цифровым кодом, формируя тем самым информационный сигнал с фазовой манипуляцией, усиливают сформулированный сигнал по мощности, излучают его в эфир, принимают на другом конце контролируемого участка трубопровода информационный фазоманипулируемый сигнал, демодулируют его, выделяя цифровой код, осуществляют корреляционную обработку двух цифровых кодов, определяя тем самым разность времени прихода указанных волн и местоположение утечки, причем информационный и тревожный фазоманипулируемые сигналы формируют на разных несущих частотах.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УТЕЧЕК В МАГИСТРАЛЬНЫХ ТРУБОПРОВОДАХ | 2000 |
|
RU2190152C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТ ПОВРЕЖДЕНИЯ НАПОРНОГО ТРУБОПРОВОДА | 1992 |
|
RU2046251C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ТЕЧИ В ПОДЗЕМНЫХ ТРУБОПРОВОДАХ | 1990 |
|
RU2018965C1 |
| Реле | 1934 |
|
SU42212A1 |
| Способ гранулирования шлаков водой | 1935 |
|
SU50590A1 |
| US 5987900 A, 23.11.1999. | |||

