Предлагаемая система является модифицированной системой КОСПАС-САРСАТ и предназначена для определения местоположения аварийных радиобуев (АРБ), передающих радиосигналы бедствия на частоте 121,5 МГц и в диапазоне частот 406-406,1 МГц.
Известны следующие спутниковые системы:
- спутниковая система ИНМАРСАТ, предоставляющая для использования в Глобальной морской системе связи различные виды услуг, включая оповещение о бедствии и связь с использованием телефонии, буквопечатания, передачи данных факсимиле;
- спутниковая система связи ИНТЕЛСАТ-VI, состоящая из десяти независимых ретрансляторов - по одному на каждый луч антенны связи;
- система ГЛОМАР - перспективная система спутниковой связи с подвижными объектами в диапазоне частот 1,5-1,6 МГц;
- система ЛОКСТАР, предназначенная для местоопределения подвижных объектов и ретрансляции радиосообщений;
- система глобального автоматического контроля за транспортными средствами при нормальных и экстремальных условиях (патент РФ №2.158.003, G 01 S 7/00, 2000);
- спутниковые системы для определения местоположения судов и самолетов, попавших в аварию (патенты РФ №2.027.195, G 01 S 5/12, 1992; №2.201.601, G 01 S 5/04, 2001; Глобальная морская система связи при бедствии и для обеспечения безопасности. М.: Транспорт, 1989, с.30, рис.12) и другие.
Из известных спутниковых систем в количестве базовой выбрана «Спутниковая система для определения местоположения судов и самолетов, потерпевших аварию» (патент РФ №2.201.601, G 01 S 5/04, 2001), которая является модифицированной системой КОСПАС-САРСАТ. Последняя является совместной международной спутниковой системой поиска и спасения потерпевших бедствий, разработанной и в настоящее время управляемой организациями Канады, Франции, США, России, Австралии и Японии. Система КОСПАС-САРСАТ в период проведения испытаний и практического применения уверенно продемонстрировала возможности использования низкоорбитальных спутников, запущенных на околополярные орбиты, для глобального обнаружения и определения местоположения аварийных радиобуев (АРБ).
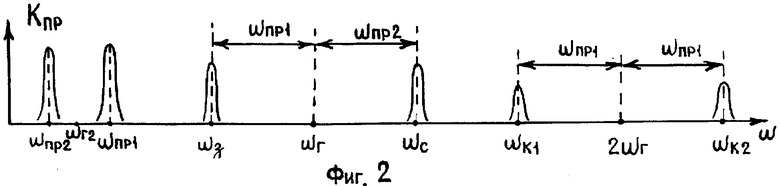
Однако в известной системе одно и то же значение первой промежуточной частоты wup может быть получено в результате приема сигналов на двух частотах wс и wз, т.е.
wup1=wс-wГ1 и wup1=wГ1-wз.
Следовательно, если частоту wс принять за основной канал приема, то, наряду с ним, будет иметь место зеркальный канал приема, частота wз которого отличается от частоты wс на 2wup1 и расположена симметрично (зеркально) относительно частоты wГ1 первого гетеродина.
Преобразование по зеркальному каналу приема происходит с тем же коэффициентом преобразования Кпр, что и по основному каналу. Поэтому он наиболее существенно влияет на избирательность и помехоустойчивость третьего приемного устройства (фиг.2).
Кроме зеркального существуют и другие дополнительные (комбинационные и интермодуляционные) каналы приема.
В общем виде любой комбинационный канал приема имеет место при выполнении следующего условия
 ,
,
где wki - частота i-го комбинационного канала приема;
m, n, i - целые положительные числа.
Наиболее вредными комбинационными каналами приема являются каналы, образующиеся при взаимодействии несущей частоты принимаемого сигнала, с гармониками частоты гетеродина малого порядка (второй, третьей и т.д.), так как чувствительность третьего приемного устройства по этим каналам близка к чувствительности основного канала. Так, два комбинационных канала при m=1 и n=2 соответствуют частотам
wk1=2wГ1-wup1 и wk2=2wГ1+wup1.
Если частота помехи близка или равна первой промежуточной частоте (wП=wup1), то образуется канал прямого прохождения. Для данной помехи элементы преобразователя частоты выполняют функцию простых передаточных звеньев.
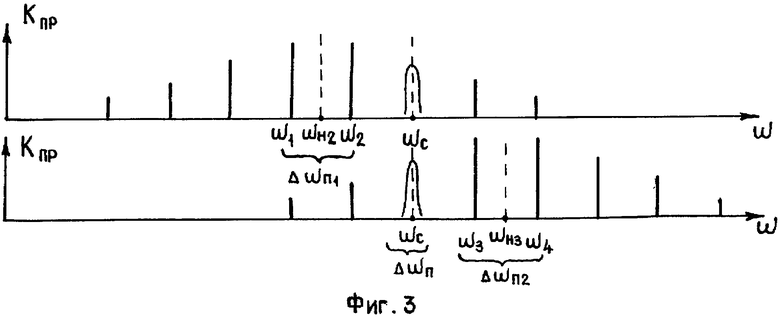
Интермодуляционные каналы проявляются при одновременном появлении в свободном канале сразу двух сигналов, взаимодействующих друг с другом. Природа интермодуляционных помех такова.
Если на вход третьего приемного устройства одновременно попадают два сигнала большой амплитуды с частотами w1 и w2 (фиг.3), то образуют на любых нелинейных элементах ряд интермодуляционных частот, определяемых выражением:
mw1±nw2=wmn.
Сумма (разность) коэффициентов m и n называется порядком, т.е. интермодуляционная частота wmn называется частотой порядка m±n. С повышением порядка амплитуды помех быстро спадают.
Если частота помехи попала в полосу пропускания ΔwП приемного устройства, она принимается на правах полезного сигнала.
Наличие ложных сигналов (помех), принимаемых по зеркальному, комбинационным, интермодуляционным каналам и каналу прямого прохождения, приводит к снижению помехоустойчивости и точности пеленгации судов и самолетов, потерпевших аварию.
Технической задачей изобретения является повышение помехоустойчивости и точности пеленгации радиобуев, установленных на судах и самолетах, потерпевших аварию, путем подавления ложных сигналов (помех), принимаемых по дополнительным каналам.
Поставленная задача достигается тем, что спутниковая система для определения местоположения судов и самолетов, потерпевших аварию, содержащая на судах и самолетах аварийные радиобуи, на пунктах приема информации последовательно включенные приемное устройство с антенной, первое устройство обработки информации, устройство сопряжения с сетями связи, второй вход которого через второе устройство обработки информации соединен с выходом приемного устройства, устройство контроля и управления и устройство связи поисково-спасательных организаций, на искусственных спутниках Земли последовательно включенные второе приемное устройство с второй антенной, первое запоминающее устройство и передатчик с антенной, второй вход которого соединен с выходом первого приемного устройства с первой антенной, а третий вход - с выходом второго приемного устройства, последовательно включенные третье приемное устройство с третьей, четвертой и пятой антеннами и второе запоминающееустройство, выход которого соединен с четвертым входом передатчика, пятый вход которого соединен с выходом третьего приемного устройства, при этом первая и вторая антенны подключены также и к третьему приемному устройству, для передачи тревожной информации с аварийных радиобуев использованы сложные сигналы с фазовой манипуляцией, третье приемное устройство содержит измерительный и четыре пеленгационных каналов, измерительный канал состоит из первой антенны и последовательно включенных первого смесителя, второй вход которого через первый гетеродин соединен с выходом блока поиска, и первого усилителя первой промежуточной частоты, последовательно включенных удвоителя фазы, второго измерителя ширины спектра, блока сравнения, второй вход которого соединен с выходом первого измерителя ширины спектра, порового блока, второй вход которого через линию задержки соединен с его выходом, первого ключа, второго смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя второй промежуточной частоты, первого перемножителя, второй вход которого соединен с выходом фильтра нижних частот, узкополосного фильтра, второго перемножителя, второй вход которого соединен с выходом усилителя второй промежуточной частоты, фильтра нижних частот и первого сумматора, выход которого является выходом третьего приемного устройства, при этом управляющий вход блока, каждый пеленгационный канал состоит из последовательно включенных антенны, смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, перемножителя, второй вход которого соединен с выходом усилителя второй промежуточной частоты, узкополосного фильтра и фазового детектора, выход которого соединен с соответствующим входом первого сумматора, при этом вторые входы фазовых детекторов первого и третьего пеленгационных каналов соединены с выходами узкополосных фильтров первого и третьего пеленгационных каналов соответственно, приемные антенны измерительного и пеленгационных каналов размещены в виде симметричного геометрического креста, в пересечении которого помещена приемная антенна измерительного канала, измерительный канал снабжен вторым, третьим, четвертым и пятым сумматорами, четырьмя полосовыми фильтрами, тремя фазоинверторами, двумя фазовращателями на 90°, вторым ключом, третьим перемножителем, вторым усилителем первой промежуточной частоты, третьим смесителем и амплитудным детектором, причем к выходу первой приемной антенны последовательно подключены первый полосовой фильтр, первый фазоинвертор, второй сумматор, второй вход которого соединен с выходом первой приемной антенны, второй полосовой фильтр, второй фазоинвертор, третий сумматор, второй вход которого соединен с выходом второго сумматора, третий полосовой фильтр, третий фазоинвертор и четвертый сумматор, второй вход которого соединен с выходом третьего сумматора, а выход подключен к первому входу первого смесителя, к второму выходу первого гетеродина, последовательно подключены первый фазовращатель на 90°, третий смеситель, второй вход которого соединен с выходом четвертого сумматора, второй усилитель первой промежуточной частоты, второй фазовращатель на 90°, пятый сумматор, второй вход которого соединен с выходом первого усилителя первой промежуточной частоты, третий перемножитель, второй вход которого соединен с выходом четвертого сумматора, четвертый полосовой фильтр, амплитудный детектор и второй ключ, второй вход которого соединен с выходом пятого сумматора, а выход подключен к входам удвоителя фазы, первого измерителя ширины спектра и первого ключа.
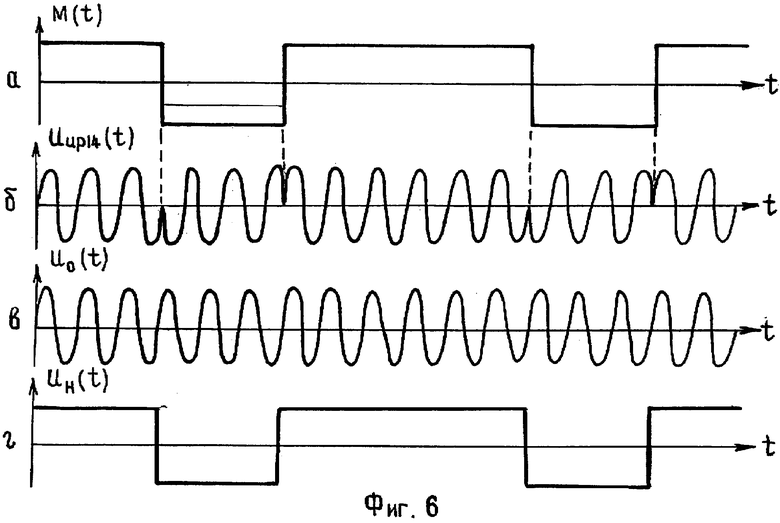
Структурная схема спутниковой системы для определения местоположения судов и самолетов, потерпевших аварию, представлена на фиг.1. Частотные диаграммы, поясняющие принцип образования дополнительных каналов приема, изображены на фиг.2 и 3. Структурная схема третьего, второго приемного устройства изображена на фиг.4. Взаимное расположение бортовых приемных антенн показано на фиг.5. Временные диаграммы, поясняющие принцип работы системы, изображены на фиг.6.
Система содержит первый 1 и второй 2 аварийные радиобуи, искусственный спутник Земли (ИСЗ) 3 и пункт 16 приема информации.
Бортовая аппаратура ИСЗ 3 содержит последовательно включенные первую приемную антенну 4, первое приемное устройство 9 и передатчик 14 с антенной 15, последовательно включенные вторую приемную антенну 5, второе приемное устройство 10 и первое запоминающее устройство 12, выход которого соединен с вторым входом передатчика 14, третий вход которого соединен с выходом второго приемного устройства 10, последовательно подключенные к приемным антеннам 4-8 третье приемное устройство 11 и второе запоминающее устройство 13, выход которого соединен с четвертым входом передатчика 14, пятый вход которого соединен с выходом третьего приемного устройства 11.
Пункт 16 приема информации содержит последовательно включенные приемную антенну 17, приемное устройство 18, первое устройство 19 обработки информации, устройство 21 сопряжения с сетями связи, второй вход которого через второе устройство 20 обработки информации соединен с выходом приемного устройства 18, устройство 22 контроля и управления и устройство 23 связи поисково-спасательных организаций.
Третье приемное устройство 11 состоит из измерительного и четырех пеленгационных каналов.
Измерительный канал содержит последовательно включенные первую приемную антенну 4, первый полосовой фильтр 65, первый фазоинвертор 66, второй сумматор 67, второй вход которого соединен с выходом антенны 4, второй полосовой фильтр 68, второй фазоинвертор 69, третий сумматор 70, второй вход которого соединен с выходом второго сумматора 67, третий полосовой фильтр 71, третий фазоинвертор 72 и четвертый сумматор 73, второй вход которого соединен с выходом сумматора 70, первый смеситель 24, второй вход которого соединен с первым выходом первого гетеродина 30, и первый усилитель 31 первой промежуточной частоты, последовательно подключенные к второму выходу гетеродина 30 первый фазообразователь 74 на 90°, третий смеситель 75, второй вход которого соединен с выходом сумматора 73, второй усилитель 76 первой промежуточной частоты, второй фазовращатель 77 на 90°, пятый сумматор 78, второй вход которого соединен с выходом усилителя 31 первой промежуточной частоты, третий перемножитель 79, второй вход которого соединен с выходом сумматора 73, четвертый полосовой фильтр 80, амплитудный детектор 81, второй ключ 82, второй вход которого соединен с выходом сумматора 78, удвоитель 37 фазы, второй измеритель 39 ширины спектра, блок 40 сравнения, второй вход которого через первый измеритель 38 ширины спектра соединен с выходом ключа 82, пороговый блок 41, второй вход которого через линию 42 задержки соединен с его выходом, первый ключ 43, второй вход которого соединен с выходом ключа 82, второй смеситель 45, второй вход которого соединен с выходом второго гетеродина 44, усилитель 46 второй промежуточной частоты, первый перемножитель 48, второй вход которого соединен с выходом фильтра 51 нижних частот, узкополосный фильтр 50, второй перемножитель 49, второй вход которого соединен с выходом усилителя 46 второй промежуточной частоты, фильтр 51 нижних частот и первый сумматор 64, при этом управляющий вход первого гетеродина 30 через блок 29 поиска соединен с выходом порового блока 41, удвоитель 37 фазы, измерители 38 и 39 ширины спектра, блок 40 сравнения, пороговый блок 41, линия 42 задержки и первый ключ 43 образуют блок 36 обнаружения фазоманипулированного сигнала. Перемножители 48 и 49, узкополосный фильтр 50 и фильтр 51 нижних частот образуют демодулятор 47 фазоманипулированного сигнала.
Каждый пеленгационный канал состоит из последовательно включенных и приемной антенны 5 (6, 7, 8), смесителя 25 (26, 27, 28), второй вход которого соединен с первым выходом первого гетеродина 30, усилителя 32 (33, 34, 35) первой промежуточной частоты, перемножителя 52 (53, 54, 55), второй вход которого соединен с выходом усилителя 46 второй промежуточной частоты, узкополосного фильтра 56 (57, 58, 59) и фазового детектора 60 (61, 62, 63), выход которого соединен с соответствующим входом первого сумматора 64, причем вторые входы фазовых детекторов 60 и 62 первого и третьего пеленгационных каналов соединены с выходом второго гетеродина 44, вторые входы фазовых детекторов 61 и 63 третьего и четвертого пеленгационных каналов соединены с выходами узкополосных фильтров 56 и 58 первого и третьего пеленгационных каналов соответственно.
Подавление ложных сигналов (помех), принимаемых по Зеркальному каналу на частоте wз, обеспечивается "внешним кольцом", состоящим из смесителей 24 и 75, гетеродина 30, фазовращателей 74 и 79 на 90°, усилителей 31 и 76 первой промежуточной частоты и сумматора 78 и реализующим фазокомпенсационный метод.
Подавление ложных сигналов (помех), принимаемых по комбинационным каналам на частотах wк1 и wк2, обеспечивается "внутренним кольцом", состоящим из перемножителя 79, полосового фильтра 80, амплитудного детектора 81, ключа 82 и реализующим методом узкополосной фильтрации.
Подавление ложных сигналов (помех), принимаемых по каналу прямого прохождения на частоте wup, обеспечивается фильтром-пробкой, состоящим из полосового фильтра 65, фазоинвертора 66, сумматора 67 и реализующий фазокомпенсационный метод.
Подавление ложных сигналов (помех), принимаемых по интермодуляционным каналам в полосе частот ΔwП1 и ΔwП2, обеспечивается фильтрами-пробками, состоящими из полосовых фильтров 68 и 71, фазоинверторов 69 и 72, сумматоров 70 и 73 и реализующий фазокомпенсационный метод.
Система работает следующим образом.
В состав модифицированной системы (нормальная конфигурация) входят четыре спутника, два из которых представляются и поддерживаются стороной КОМПАС и два - стороной САРСАТ. В настоящее время имеются три типа АРБ: авиационные, морские и переносные (для использования на суше), которые излучают сигналы бедствия, обнаруживаемые и принимаемые спутниками модифицированной системы КАСПАС-САРСАТ с целью последующей ретрансляции на наземные станции - пункты приема информации (ППИ) для обработки и определения местоположения аварийных радиобуев. Зона обслуживания системы в режиме реального масштаба времени определяется количеством и географическим расположением ППИ. Каждый ППИ обслуживает район с радиусом примерно 2500 км. В систему входят 15 ППИ, дислоцированных в семи странах. В России ППИ расположены в Москве, Архангельске, Новосибирске и Владивостоке.
Сообщения о бедствии и координаты аварийного объекта передаются через центр управления системой (ЦУС) либо в национальный спасательно-координационный центр, либо в другой ЦУС или соответствующую поисково-спасательную службу с целью развертывания поисково-спасательной операции.
В составе системы используются АРБ 1, работающие на частоте 121,5 МГЦ - международная авиационная аварийная частота - и в диапазоне частот 406-406,1 МГц, где используются АРБ 2, технически более сложные, чем АРБ 1.
Важной особенностью нового положения АРБ является включение в состав его излучения цифрового сообщения, которое несет информацию о принадлежности АРБ (страна), идентификационном номере судна или самолета и виде бедствия. В состав сообщения АРБ, установленных на судах, может быть также включена информация о местоположении судна, введенная вручную или автоматически от судовых радионавигационных приборов.
Для обнаружения сигналов АРБ и определения их местоположения используются два режима работы: режим приема и передачи информации в реальном масштабе времени и режим приема с запоминанием информации на борту ИСЗ и ее последующей передачи на пункт приема информации при нахождении ИСЗ в зоне радиовидимости ППИ. АРБ 1 могут использоваться только в режиме непосредственной передачи, в то время как АРБ 2 могут использоваться в обоих режимах работы.
Частота настройки приемного устройства 9 равна 121,5 МГц, частота настройки приемных устройств 10 и 11 находится в диапазоне частот 406-406,1 МГц.
Приемные устройства 9 и 10 выполняют следующие функции:
- демодуляцию цифровых сообщений, приемных от АРБ 1 и АРБ 2;
- измерение частоты принятого сигнала;
- привязку меток времени к приведенным измерениям.
Приемное устройство 11 выполняет следующие функции:
- подавление ложных сигналов (помех), принимаемых по дополнительным каналам;
- обнаружение и селекцию фазоманипулированных (ФМн) сигналов в заданном диапазоне частот;
- синхронное детектирование ФМн-сигналов;
- точную и однозначную пеленгацию АРБ 2 фазовым методом;
- привязку результатов проведенных измерений к меткам времени.
Для определения координат АРБ 2 в предлагаемой системе используется фазовый метод пеленгации, которому свойственно противоречие между требованиями точности и однозначности определения угловых координат АРБ 2.
С целью устранения этого противоречия в каждой плоскости используются две шкалы отсчета: большая - точная, но неоднозначная и малая - грубая, но однозначная:
 .
.
При этом меньшая измерительная база d образует грубую, но однозначную шкалу пеленгации, а большая измерительная база 2d - тонкую, но неоднозначную шкалу пеленгации.
Просмотр данного диапазона частот Дf и поиск ФМн-сигналов АРБ 2 осуществляется с помощью блока 29 поиска, который периодически с периодом ТП по пилообразному закону изменяет частоту первого гетеродина 30. В качестве блока 29 поиска может быть использован генератор пилообразного напряжения.
Принимаемые ФМн-сигналы:
u1(t)=υc·cos[(wс±Δw)t+ϕк(t)+ϕ1],
u2(t)=υc·cos[(wс±Δw)t+ϕк(t)+ϕ2],
u3(t)=υc·cos[(wс±Δw)t+ϕк(t)+ϕ3],
u4(t)=υc·cos[(wс±Δw)t+ϕк(t)+ϕ4],
u5(t)=υc·cos[(wс±Δw)t+ϕк(t)+ϕ5], 0≤t≤Tc,
где υc, wс, Тс, ϕ1-ϕ5 - амплитуда, несущая частота, длительность и начальные фазы сигналов;
±Δw - нестабильность несущей частоты, обусловленная эффектом Доплера и другими дестабилизирующими факторами;
ϕк(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t), причем ϕк(t)=const при kτэ<t<(k+1)τэ и может изменяться скачком при t=kτэ, т.е. на границах между элементарными посылками (k=1, 2,..., N-1);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тс(Тс=N·τэ), с выходов приемных антенн 4-8 непосредственно и через сумматоры 67, 70 и 73, у которых работает только одно плечо, поступают на первые входы смесителей 25-28, 24 и 75, на вторые входы которых подаются напряжения первого гетеродина 30 линейно изменяющейся частоты:
uГ1(t)=υГ1·cos(wГ1+πγt2+ϕГ1),
uГ1'(t)=υГ1·cos(wГ1+πγt2+ϕГ1+90°), 0≤t≤ТП,
где υГ1, wГ1, ϕГ1 - амплитуда, начальная частота и начальная фаза напряжения гетеродина 30;
скорость изменения частоты гетеродина (скорость перестройки):
 ;
;
ТП - период перестройки.
На выходах смесителей 24, 75, 25-28 образуются напряжения комбинационных частот. Усилителями 31, 76, 32-35 выделяются напряжения первой промежуточной (разностной) частоты:
uup1(t)=υпр·cos[(wup1±Δw)t+ϕк(t)-πγt2+ϕup1],
uup2(t)=υпр·cos[(wup1±Δw)t+ϕк(t)-πγt2+ϕup1-90°],
uup3(t)=υпр·cos[(wup1±Δw)t+ϕк(t)-πγt2+ϕup2],
uup4(t)=υпр·cos[(wup1±Δw)t+ϕк(t)-πγt2+ϕup3],
uup5(t)=υпр·cos[(wup1±Δw)t+ϕк(t)-πγt2+ϕup4],
uup6(t)=υпр·cos[(wup1±Δw)t+ϕк(t)-πγt2+ϕup5], 0≤t≤Tc,
где υпр= К1·υс·υГ1;
К1·υс·υГ1;
wup1=wc-wГ1 - первая промежуточная частота;
ϕup1=ϕ1-ϕГ1; ϕup2=ϕ2-ϕГ1;
ϕup3=ϕ3-ϕГ1; ϕup4=ϕ4-ϕГ1;
ϕup5=ϕ5-ϕГ1;
которые представляют собой сложные сигналы с комбинированной фазовой манипуляцией и линейной частотной модуляцией (ФМн-ЛУМ) на промежуточной частоте.
Напряжения uup3(t)-uup6(t) поступают на первые входы перемножителей 52-55.
Напряжение uup2(t) с выходом усилителя 76 первой промежуточной частоты поступает на вход фазовращателя 77 на 90°, на выходе которого образуется напряжение
uup7(t)=υпр·cos[(wup1±Δw)t+ϕк(t)-πγt2+ϕup1+90°-90°]=
υпр·cos[(wup1±Δw)t+ϕк(t)-πγt2+ϕup1].
Напряжения uup2(t) и uup7(t) поступают на два входа сумматора 78, на выходе которого образуется суммарное напряжение
uΣ1(t)=υΣ1·cos[(wup1±Δw)t+ϕк(t)-πγt2+ϕup1], 0≤t≤Tc,
где υΣ1=2υпр,
которое поступает на первый вход перемножителя 79, на второй вход которого подается принимаемый ФМн-сигнал u1(t) с выхода сумматора 73. На выходе перемножителя 79 образуется гармоническое напряжение
u6(t)=υ6·cos(wГ1t+πγt2+ϕГ1], 0≤t≤Tc,
где  ;
;
K2 - коэффициент передачи перемножителя.
Частота настройки wН1 полосового фильтра 65 выбирается равной
 .
.
Частота настройки wН2 полосового фильтра 68 выбирается равной
 .
.
Частота настройки wН3 полосового фильтра 71 выбирается равной
 .
.
Частота настройки wН4 полосового фильтра 80 выбирается равной
wH4=wГ1.
Гармоническое напряжение u6(t) выделяется полосовым фильтром 80, детектируется амплитудным детектором 81 и поступает на управляющий вход ключа 82, открывая его. В исходном состоянии ключи 43 и 82 всегда закрыты. Напряжение uΣ1(t) с выхода сумматора 78 через открытый ключ 82 поступает на вход обнаружителя 36, состоящего из удвоителя 37 фазы, первого 38 и второго 39 измерителей ширины спектра, блока 40 сравнения, порогового блока 41, линии 42 задержки и ключа 43.
На выходе удвоителя 37 фазы, в качестве которого может быть использован перемножитель, на два входа которого поступает один и тот же сигнал, образуется напряжение
u7(t)=υ7·cos[2(wup1±Δw)t-2πγt2+ϕup1], 0≤t≤Tc,
где 
Так как 2ϕK(t)={0,2π}, то в указанном напряжении манипуляция фазы уже отсутствует.
Ширина спектра Δƒ2 второй гармоники сигнала определяется длительностью сигнала Tc(Δƒ2=1/Tc), тогда как ширина спектра ФМн-сигнала определяется длительностью τэ его элементарных посылок (Δƒс=1/τэ), т.е. ширина спектра второй гармоники сигнала в N раз меньше ширины спектра входного сигнала:

Следовательно, при удвоении фазы ФМн-сигнала его спектр сворачивается в N раз. Это обстоятельство и позволяет обнаружить ФМн-сигнал даже тогда, когда его мощность на входе приемного устройства 11 меньше мощности шумов и помех.
Ширина спектра Δƒс входного сигнала измеряется с помощью измерителя 38, а ширина спектра Δƒ2 второй его гармоники измеряется с помощью измерителя 39. Напряжения υ1 и υ2, пропорциональные Δƒс и Δƒ2, с выходов измерителей 38 и 39 ширины спектра сигналов поступают на два входа блока 40 сравнения. Так как υ1≫υ2, то на выходе блока 40 сравнения образуется положительное напряжение, которое превышает пороговый уровень υпор в пороговом блоке 41. Последний выбирается таким, чтобы его превышали случайные помехи. Пороговый уровень υпор превышается только при обнаружении ФМн-сигнала. При превышении порогового напряжения υпор в пороговом блоке 41 формируется постоянное напряжение, которое поступает на вход линии 42 задержки, на управляющий вход ключа 43, открывая его, и на управляющий вход блока 29 поиска, переводя его в режим остановки.
С этого момента времени просмотр заданного частотного диапазона Дƒ и поиск ФМн-сигналов прекращается на время обработки обнаруженного ФМн-сигнала, которое определяется временем задержки τз линии 42 задержки.
При прекращении перестройки гетеродина 30 усилителями 34, 76, 32-35 выделяются следующие напряжения:
uup8(t)=υпр·cos[(wup1±Δw)t+ϕк(t)+ϕup1],
uup9(t)=υпр·cos[(wup1±Δw)t+ϕк(t)+ϕup1-90°],
uup10(t)=υпр·cos[(wup1±Δw)t+ϕк(t)+ϕup2],
uup11(t)=υпр·cos[(wup1±Δw)t+ϕк(t)+ϕup3],
uup12(t)=υпр·cos[(wup1±Δw)t+ϕк(t)+ϕup4],
uup13(t)=υпр·cos[(wup1±Δw)t+ϕк(t)+ϕup5], 0≤t≤Tc.
На выходе сумматора 78 в этом случае образуется суммарное напряжение
uΣ2(t)=υΣ1·cos[(wup1±Δw)t+ϕк(t)+ϕup1], 0≤t≤Tc,
которое через открытый ключ 43 поступает на вход смесителя 45, на второй вход которого поступает напряжение второго гетеродина 44
uГ2(t)=uГ2·cos(wГ2t+ϕГ2)
с стабильной частотой wГ2.
На входе смесителя 45 образуются напряжения комбинационных частот. Усилителем 46 выделяется напряжение второй промежуточной частоты (фиг.6, б)
uup14(t)=υпр1·cos[(wup2±Δw)t+ϕк(t)+ϕup6], 0≤t≤Tc,
где 
wup2=wup1-wГ2 - вторая промежуточная частота;
ϕup6=ϕup1-ϕГ2.
Это напряжение поступает на вход демодулятора 47 ФМн-сигнала, состоящего из первого 48 и второго 49 перемножителей, узкополосного фильтра 50 и фильтра 51 нижних частот.
На второй вход перемножителя 49 подается с выхода узкополосного фильтра 50 опорное напряжение (фиг.6, в)
u0(t)=υ0·cos[(wup2±Δw)t+ϕup6].
В результате перемножения образуется результирующее напряжение
uΣ(t)=υΣ·cosϕк(t)+υΣ·cos[2(wup2±Δw)t+ϕк(t)+2ϕup6],
где 
Аналог модулирующего кода (фиг.6, г)
uH(t)=υΣ·cosϕК(t)
выделяется фильтром 51 нижних частот и поступает на первый вход сумматора 64 и на второй вход перемножителя 48. На выходе последнего образуется гармоническое напряжение
u0(t)=υ0·cos[(wup2±Δw)t+ϕup6], 0≤t≤Tc,
где 
Описанная выше работа фазового демодулятора 47 соответствует стационарному (устойчивому) режиму работы. Ему предшествует переходной режим работы в момент включения устройства, когда в полосе пропускания узкополосного фильтра 50 появляется гармоническое напряжение u6(t). Это обусловлено переходными процессами, сопровождающимися появлением большого количества спектральных составляющих, среди которых будет присутствовать и гармоническое колебание с частотой (wup2±Δw).
Фазовый демодулятор 47 свободен от явления «обратной работы».
Напряжение uup14(t) с выхода усилителя 46 второй промежуточной частоты одновременно подается на вторые входы перемножителей 52-55 пеленгационных каналов. На выходах перемножителей 52-55 образуются следующие гармонические напряжения:
u8(t)=υ8·cos(wГ2t+ϕГ2+Δϕ1),
u9(t)=υ8·cos(wГ2t+ϕГ2-Δϕ2),
u10(t)=υ8·cos(wГ2t+ϕГ2+Δϕ3),
u11(t)=υ8·cos(wГ2t+ϕГ2-Δϕ4), 0≤t≤Tc,
где 




α, β - угловые координаты АРБ 2 (азимут и угол места),
которые выделяются узкополосными фильтрами 56-59 и поступают на первые входы фазовых детекторов 60-63 соответственно. На вторые входы фазовых детекторов 60 и 62 подается напряжение uГ2(t) второго гетеродина 44, на вторые входы фазовых детекторов 61 и 63 подаются гармонические напряжения u8(t) и u10(t) с выходов узкополосных фильтров 60 и 62 соответственно.
Знаки «+» и «-» перед фазовыми сдвигами соответствуют диаметрально противоположным положениям приемных антенн 5 и 6, 7 и 8 относительно приемной антенны 4.
На выходах фазовых детекторах 60-63 образуются постоянные напряжения:
uH1(α)=υH1·cosΔϕ1,
uH2(α)=υH2·cosΔϕ5,
uH3(β)=υH1·cosΔϕ3,
uH4(β)=υH2·cosΔϕ6,
где 

K3 - коэффициент передачи фазовых детекторов;


которые подаются на соответствующие входы сумматора 64. Выход сумматора 64 является выходом третьего приемного устройства 11.
Зная высоту полета h ИСЗ и измерив с высокой точностью и однозначностью азимут α и угол места β, можно определить местоположение аварийного радиобуя, а следовательно, и судна или самолета, потерпевшего аварию. В аналоге модулирующего кода uH(t) (фиг.6, г), выделяемого из принимаемого ФМн-сигнала, содержится вся необходимая информация о потерпевшем объекте (тип объекта, класс объекта, страна, авиакомпания, фирма, владелец и т.п.).
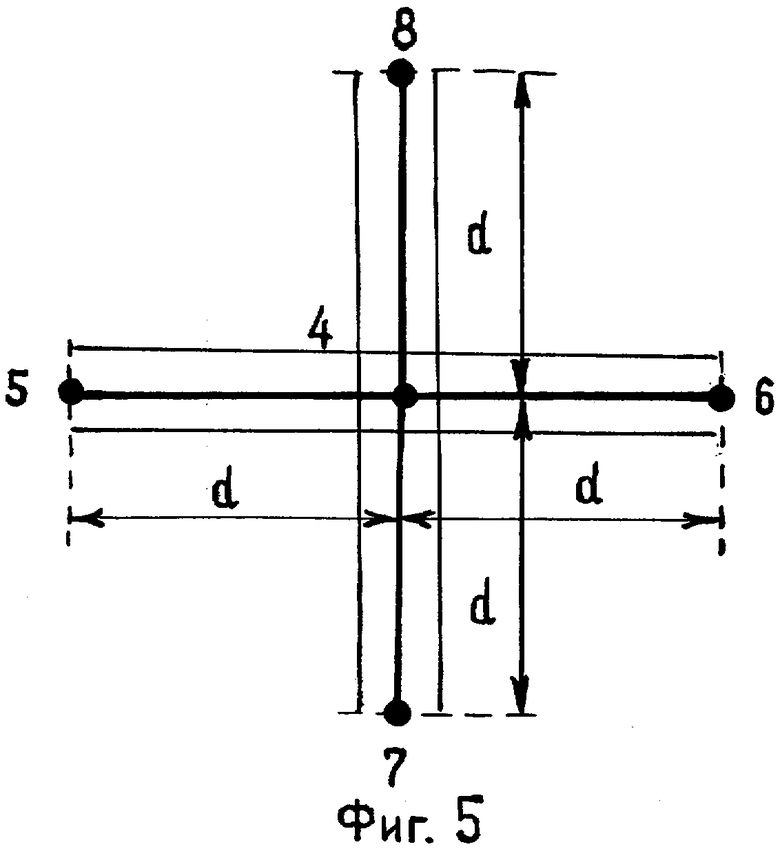
Приемные антенны 4-8 размещаются таким образом, что измерительные базы образуют симметрический геометрический крест, в пересечении которого помещается приемная антенна 4 измерительного канала, общая для антенн 5-8 пеленгационных каналов, размещенных в азимутальной и угломестной плоскостях (фиг.5). При этом в каждой плоскости меньшие базы d образуют грубые, но однозначные шкалы пеленгации, а большие базы 2d - точные, но неоднозначные шкалы пеленгации, между которыми выполняется следующее неравенство:
 .
.
Так, предполагается использовать фазовый метод пеленгации аварийных радиобуев с помощью пяти приемных антенн, расположенных в виде симметричного геометрического креста. При этом приемные антенны 4-8 располагаются на специальных панелях, аналогичным солнечным панелям, которые после вывода космического аппарата на орбиту раскрываются и располагаются по направлению к поверхности Земли (фиг.5).
Время задержки τз линии 42 задержки выбирается таким, чтобы можно было произвести обработку обнаруженного ФМн-сигнала. По истечении этого времени напряжение с выхода линии 42 задержки поступает на вход сброса порогового блока 41 и сбрасывает его в начальное (нулевое) состояние. При этом блок 29 поиска переводится в режим перестройки, а ключ 43 закрывается, т.е. переводится в исходное состояние.
В случае обнаружения следующего ФМн-сигнала на другой несущей частоте, излучаемого аварийным радиобуем другого объекта, потерпевшего аварию, система работает аналогичным образом.
Вся полученная на борту ИСЗ 3 информация от аварийных радиобуев включается в состав формата цифрового сообщения, передаваемого на ППИ 16. Сформированное цифровое сообщение передается со скоростью 2400 бит/с в реальном масштабе времени после предварительной обработки и одновременно записывается в запоминающие устройства 12 и 13. Передача информации из запоминающих устройств 12 и 13 производится в том же формате и с той же скоростью, что и в реальном масштабе времени, в результате чего ППИ 16 принимает хранящиеся в бортовых запоминающихся устройствах 12 и 13 сообщения АРБ 2, накопленные за время полного витка спутника вокруг Земли.
Если в момент передачи информации из запоминающихся устройств 12 и 13 на вход приемных устройств 10 или 11 спутника поступает сигнал от АРБ 2, то передача прерывается для обработки сигнала, информация о котором после обработки включается в формат сообщения для передачи на ППИ 16.
В сообщение включается соответствующее число в двоичном виде, показывающее вид передачи: реальный масштаб времени или из запоминающих устройств, кроме того, идентифицируется время передачи последнего сообщения из запоминающих устройств.
На вход бортового передатчика 14 подается информация от приемных устройств 9, 10, 11 и запоминающих устройств 12, 13. Мощность излучения передатчика 14 может регулироваться с наземного комплекса управления системой. В передатчике 14 также используется фазовая манипуляция колебания несущей частоты композиционным кодом в каскадах ее формирования (до умножения). Затем колебание переводится на частоту 1544,5 МГц, усиливается до необходимого уровня и излучается антенной 15 в направлении ППИ 16.
На ППИ 16 принятый сигнал с выхода приемного устройства 18 поступает на устройства обработки информации 19 и 20. Причем устройство 19 обеспечивает обработку информации, поступающей от АРБ 1, а устройство 20 обеспечивает обработку информации, поступающей от АРБ 2. Обработанная информация сопрягается с сетями связи, по которым необходимая информация доводится до поисково-спасательных организаций.
Система использует в качестве тревожных сигналов сложные сигналы с фазовой манипуляцией.
С точки зрения обнаружения сложные сигналы с фазовой манипуляцией обладают энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМн-сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного ФМн-сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку ФМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемных устройств.
Кроме того, сложные ФМн-сигналы позволяют применять новый вид селекции - структурную селекцию. Это значит, что появляется новая возможность разделять сигналы, действующие в одной и той же полосе частот и в одни и те же промежутки времени. Принципиально можно отказаться от традиционного метода разделения рабочих частот используемого диапазона между работающими аварийными радиобуями и селекцией их на борту ИСЗ с помощью частотных фильтров. Его можно заменить новым методом, основанным на одновременной работе каждым АРБ во всем диапазоне частот сигналами с фазовой манипуляцией с выделением приемными устройствами 10 и 11 сигнала необходимого АРБ посредством его структурной селекции.
Система инвариантна к виду модуляции и нестабильности несущей частоты принимаемых сигналов, так как пеленгация аварийных радиобуев осуществляется на стабильной частоте wГ2 второго гетеродина 44. Поэтому указанные факторы и оказывают влияния на фазовые измерения.
Кроме того, за счет использования панелей, на которых размещаются приемные антенны 4-8, значительно упрощается техническая реализация фазового метода пеленгации на борту летательного аппарата.
Описанная выше работа третьего бортового приемного устройства 11 системы соответствует случаю приема полезных ФМн-сигналов по основному каналу на частоте wс (фиг.2).
Если сложный сигнал (помеха) принимается по зеркальному каналу на частоте wз
u3(t)=υз·cos(wзt+ϕз), 0≤t≤Tз,
то усилителями 31 и 76 первой промежуточной частоты выделяются следующие напряжения:
uup15(t)=υпр15·cos(wup1t+ϕup15),
uup16(t)=υпр15·cos(wup1t+ϕup15+90°), 0≤t≤Тз,
где 
wup1=wГ1-wз - первая промежуточная частота;
ϕup15=ϕГ1-ϕз.
Напряжение uup16(t) с выхода усилителя 76 поступает на вход фазовращателя 77 на 90°, на выходе которого образуется напряжение
uup17(t)=υпр15·cos(wup1t+ϕup15+90°+90°)=-υпр15·cos(wup1t+ϕup15), 0≤t≤Тз,
Напряжения uup15(t) и uup17(t), поступающие на два входа сумматора 78, на его выходе компенсируются.
Следовательно, ложный сигнал (помеха), принимаемый по зеркальному каналу на частоте wз, подавляется.
По аналогичной причине подавляется фазокомпенсационным методом и сложный сигнал (помеха), принимаемый по первому комбинационному каналу на частоте wК1.
Если ложный сигнал (помеха) принимается по второму комбинационному каналу на частоте wК2
uК2(t)=υк2·cos(wК2t+ϕК2), 0≤t≤ТК2,
то усилителями 31 и 76 первой промежуточной частоты выделяются следующие напряжения:
uup18(t)=υпр18·cos(wup1t+ϕup18),
uup19(t)=υпр18·cos(wup1t+ϕup18-90°), 0≤t≤ТК2,
где 
wup1=wК2-2wГ1 - первая промежуточная частота;
ϕup18=ϕК2-ϕГ1.
Напряжение uup19(t) с выхода усилителя 76 первой промежуточной частоты поступает на вход фазообразователя 77 на 90°, на выходе которого образуется напряжение
uup20(t)=υпр18·cos(wup1t+ϕup18), 0≤t≤ТК2,
Напряжения uup18(t) и uup20(t) поступают на два входа сумматора 78, на выходе которого образуется суммарное напряжение
uΣз(t)=υΣз·cos(wup1t+ϕup18), 0≤t≤TК2,
где υΣз=2υпр18.
Напряжение uΣз(t) с выхода сумматора 78 поступает на первый вход перемножителя 79, на второй вход которого с выхода сумматора 73 поступает принимаемый ложный сигнал (помеха) uК2(t). На выходе последнего образуется гармоническое напряжение
u12(t)=υ12·cos(2wГ1t+ϕГ1), 0≤t≤ТК2,
где 
которое не попадает в полосу пропускания полосового фильтра 80.
Ключ 82 не открывается и ложный сигнал (помеха), принимаемый по второму комбинационному каналу на частоте wК2, подавляется.
Если ложный сигнал (помеха) принимается по каналу прямого прохождения на частоте wup1
uup(t)=υпр·cos(wup1t+ϕup), 0≤t≤Тup,
то он выделяется полосовым фильтром 65 и поступает на вход фазоинвертора 66, где образуется следующее напряжение
uup'(t)=-υпр·cos(wup1t+ϕup), 0≤t≤Тup.
Напряжения uup(t) и uup'(t), поступающие на два входа сумматора 67, на его выходе компенсируются.
Следовательно, ложный сигнал (помеха), принимаемый по каналу прямого прохождения на частоте wup, подавляется.
Подавление ложных интермодуляционных сигналов (помех), принимаемых в полосе частот ΔwП1, обеспечивается фильтром-пробкой, состоящим из полосового фильтра 68, фазоинвертора 69 и сумматора 70 и реализующим фазокомпенсационный метод. Подавление ложных интермодуляционных сигналов (помех), принимаемых в полосе частот ΔwП2, обеспечивается фильтром-пробкой, состоящим из полосового фильтра 71, фазоинвертора 72 и сумматора 73 и реализующим фазокомпенсационный метод.
Выше описаны случаи, когда на вход третьего приемного устройства поступают ложные сигналы (помех) в виде гармонических колебаний. Это сделано для упрощения записи.
Если на вход третьего приемного устройства поступают ложные сигналы (помехи), например с фазовой манипуляцией, то устройство работает аналогичным образом.
Таким образом, предлагаемая система по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение помехоустойчивости и точности пеленгации радиобуев, установленных на судах и самолетах, потерпевших аварию. Это достигается подавлением ложных сигналов (помех), принимаемых по зеркальному, комбинационным и интермодуляционным каналам, а также по каналу прямого прохождения. Причем для подавления ложных сигналов (помех), принимаемых по зеркальному, первому комбинационному и интермодуляционным каналам, а также по каналу прямого прохождения используется фазокомпенсационный метод. А для подавления ложных сигналов (помех), принимаемых по второму комбинационному каналу, используется метод узкополосной фильтрации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЁТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 2001 |
|
RU2201601C2 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2011 |
|
RU2458815C1 |
| Спутниковая система для определения местоположения судов и самолетов, потерпевших аварию | 2019 |
|
RU2723443C1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 2016 |
|
RU2629000C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2004 |
|
RU2254262C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА АВАРИЙНОГО И ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ РЕГИОНА | 2004 |
|
RU2257598C1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 1992 |
|
RU2027195C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2002 |
|
RU2226479C2 |
| УСТРОЙСТВО ДЛЯ ОПОВЕЩЕНИЯ О ПАВОДКЕ ИЛИ СЕЛЕ | 1999 |
|
RU2150751C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ПРОТИВОТРАНСПОРТНЫХ МИН | 2001 |
|
RU2213999C2 |

Изобретение является модифицируемой системой КОСПАС-САРСАТ и предназначена для определения местоположения аварийных радиобуев (АРБ). Технический результат заключается в повышении помехоустойчивости и точности пеленгации АРБ. Система содержит два АРБ, искусственный спутник Земли (ИСЗ) и пункт приема информации (ППИ). ИСЗ содержит четыре антенны, три приемных устройства, два запоминающих устройства и передатчик с антенной. ППИ содержит антенну, приемное устройство, два устройства обработки информации, устройство сопряжения с сетями связи, устройство контроля и управления и устройство связи поисково-спасательных организаций. Третье приемное устройство ИСЗ содержит пять приемных антенн, семь смесителей, шесть усилителей первой промежуточной частоты, два гетеродина, усилитель второй промежуточной частоты, блок обнаружения фазоманипулированного сигнала (ФМн-сигнала), удвоитель фазы, два измерителя ширины спектра, блок сравнения, пороговый блок, линию задержки, два ключа, демодулятор ФМн-сигнала, десять перемножителей, пять узкополосных фильтров, фильтр нижних частот, четыре фазовых детектора, пять сумматоров, четыре полосовых фильтра, три фазоинвертора, два фазовращателя на 90° и амплитудный детектор. 6 ил.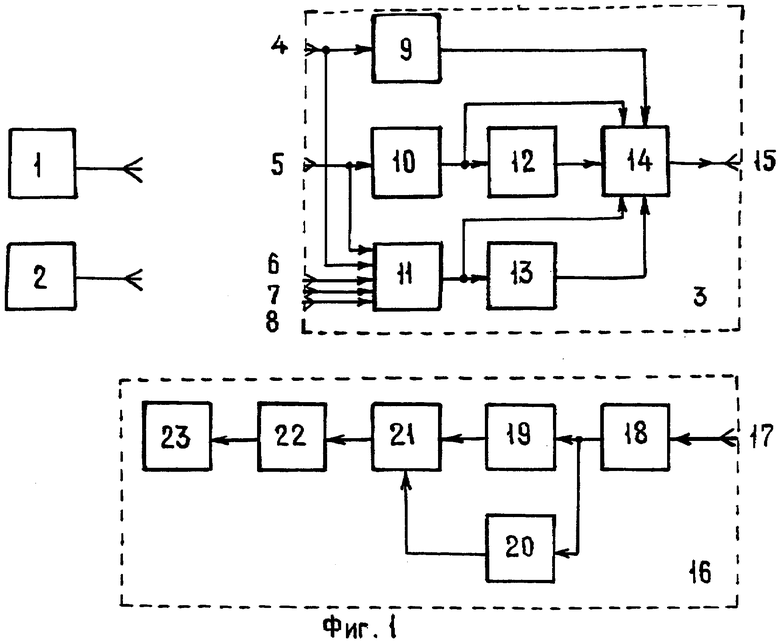
Спутниковая система для определения местоположения судов и самолетов, потерпевших аварию, содержащая на судах и самолетах аварийные радиобуи, для передачи тревожной информации с которых использованы сложные сигналы с фазовой манипуляцией, на пунктах приема информации последовательно включенные приемное устройство с антенной, первое устройство обработки информации, устройство сопряжения с сетями связи, второй вход которого через второе устройство обработки информации соединен с выходом приемного устройства, устройство контроля и управления и устройство связи поисково-спасательных организаций, на искусственных спутниках Земли последовательно включенные второе приемное устройство с второй антенной, первое запоминающее устройство и передатчик с антенной, второй вход которого соединен с выходом первого приемного устройства с первой антенной, а третий вход - с выходом второго приемного устройства, последовательно включенные третье приемное устройство с третьей, четвертой и пятой антеннами и второе запоминающее устройство, выход которого соединен с четвертым входом передатчика, пятый вход которого соединен с выходом третьего приемного устройства, при этом первая и вторая антенны подключены также и к третьему приемному устройству, третье приемное устройство содержит измерительный и четыре пеленгационных канала, измерительный канал состоит из последовательно включенных первого смесителя, первый вход которого подключен к первой антенне, а второй вход которого через первый гетеродин соединен с выходом блока поиска, и первого усилителя первой промежуточной частоты, последовательно включенных удвоителя фазы, второго измерителя ширины спектра, блока сравнения, второй вход которого соединен с выходом первого измерителя ширины спектра, порогового блока, второй вход которого через линию задержки соединен с его выходом, первого ключа, второго смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя второй промежуточной частоты, первого перемножителя, второй вход которого соединен с выходом фильтра нижних частот, узкополосного фильтра, второго перемножителя, второй вход которого соединен с выходом усилителя второй промежуточной частоты, фильтра нижних частот и первого сумматора, вход которого является выходом третьего приемного устройства, при этом управляющий вход блока поиска соединен с выходом порогового блока, каждый пеленгационный канал состоит из последовательно включенных смесителя, первый вход которого подключен к соответствующей антенне, а второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, перемножителя, второй вход которого соединен с выходом усилителя второй промежуточной частоты, узкополосного фильтра и фазового детектора, выход которого соединен с соответствующим входом первого сумматора, при этом вторые входы фазовых детекторов первого и третьего пеленгационных каналов соединены с выходом второго гетеродина, вторые входы фазовых детекторов второго и четвертого пеленгационных каналов соединены с выходами узкополосных фильтров первого и третьего пеленгационных каналов соответственно, приемные антенны пеленгационных каналов размещены в виде симметричного геометрического креста, в пересечении которого помещена приемная антенна измерительного канала, отличающаяся тем, что измерительный канал снабжен сумматорами, четырьмя полосовыми фильтрами, тремя фазоинверторами, вторым ключом, третьим перемножителем, вторым усилителем промежуточной частоты, третьим смесителем, двумя фазовращателями на 90° и амплитудным детектором, причем к выходу первой приемной антенны последовательно подключены первый полосовой фильтр, первый фазоинвертор, второй сумматор, второй вход которого соединен с выходом первой приемной антенны, второй полосовой фильтр, второй фазоинвертор, третий сумматор, второй вход которого соединен с выходом второго сумматора, третий полосовой фильтр, третий фазоинвертор и четвертый сумматор, второй вход которого соединен с выходом третьего сумматора, а выход подключен к первому входу первого смесителя, к второму выходу первого гетеродина последовательно подключены первый фазовращатель на 90°, третий смеситель, второй вход которого соединен с выходом четвертого сумматора, второй усилитель первой промежуточной частоты, второй фазовращатель на 90°, пятый сумматор, второй вход которого соединен с выходом первого усилителя первой промежуточной частоты, третий перемножитель, второй вход которого соединен с выходом четвертого сумматора, четвертый полосовой фильтр, амплитудный детектор и второй ключ, второй вход которого соединен с выходом пятого сумматора, а выход подключен к входам удвоителя фазы, первого измерителя ширины спектра и первого ключа.
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЁТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 2001 |
|
RU2201601C2 |
| Кузнечный горн | 1921 |
|
SU215A1 |
| АВАРИЙНЫЙ РАДИОБУЙ | 1993 |
|
RU2060512C1 |
| WO 03089953 А1, 30.10.2003 | |||
| US 5392052 A, 21.02.1995 | |||
| Кресло крановщика | 1981 |
|
SU1020360A1 |

