Изобретение относится к области сельскохозяйственного машиностроения, в частности к тракторным агрегатам.
Известен пахотный агрегат, включающий в себя трактор и плуг с приспособлением для регулировки направления тягового сопротивления плуга, выполненного в виде закрепленной на тракторе пружины, связанной с плугом регулируемым по длине звеном (а.с. СССР 457439, кл. А 01 В 59/04, опубл. 25.01.75).
Недостатком данного агрегата является наличие устройства с закрепленной на тракторе пружиной, связанной с плугом регулируемым по длине звеном в виде гидроцилиндра, направленного на регулирование направления линии действия тягового сопротивления плуга. Указанное регулирование направления тягового сопротивления плуга не обеспечивает возможности воздействия на управляемость тракторного агрегата при выводе его на заданную траекторию и не обеспечивает возможности регулирования траектории.
Известен сельскохозяйственный агрегат, включающий трактор с механизмом навески, содержащей нижние и верхнюю тяги, подъемные рычаги, вертикальные раскосы, цепные растяжки, который с целью повышения устойчивости прямолинейного движения агрегата, обеспечения управления поворотом и исключения переналадок механизма соединения трактора с плугом, снабжен продольной и поперечной балками, причем продольная балка своим передним концом соединена с остовом трактора посредством вертикального шарнира, расположенного в продольной плоскости симметрии трактора, а другим своим концом связана с поперечной балкой, которая жестко закреплена на остове трактора (а.с. СССР 755230, кл. А 01 В 59/04, опубл. 15.01.80).
Недостатком данного агрегата является наличие устройства в виде продольной балки, соединенной передним по ходу движения пахотного агрегата своим концом с остовом трактора посредством вертикального шарнира, расположенного в продольной плоскости симметрии трактора и связанной своим задним концом с поперечной балкой, которая жестко закреплена на остове трактора, направленного на повышение устойчивости прямолинейного движения агрегата, обеспечение управления поворотом и исключение переналадок механизма соединения трактора с плугом, но не обеспечивающего возможности воздействия на управляемость тракторного агрегата при выводе его на заданную траекторию и не обеспечивающего возможности регулирования траектории.
Известен пахотный агрегат, содержащий на остове трактора горизонтальную П-образную раму и гибкие элементы, один конец каждого из которых закреплен на плуге, а другой закреплен на П-образной раме. Целью изобретения является повышение курсовой устойчивости агрегата (а.с. СССР 1243643, кл. А 01 В 59/04, опубл. 15.07.86).
Недостатком данного агрегата является наличие на остове трактора устройства с горизонтальной П-образной рамой и гибкими элементами, связывающими упомянутую раму с плугом, направленного на повышение курсовой устойчивости агрегата, но не обеспечивающего возможности воздействия на управляемость тракторного агрегата при выводе его на заданную траекторию и не обеспечивающего возможности регулирования траектории.
Наиболее близким из известных технических решений является тракторный агрегат, состоящий из гусеничного трактора, снабженного планетарным механизмом поворота с режимом дифференциальной связи гусениц, агрегатируемого орудия и прицепного устройства, установленного с возможностью перемещения с помощью гидроцилиндра на оси, закрепленной на раме трактора (а.с. СССР 1009598, кл. А 01 В 59/04, опубл. 02.07.83).
Недостатком данного агрегата является наличие на остове трактора прицепного устройства, установленного с возможностью перемещения на оси, закрепленной на раме трактора при дифференциальной связи гусениц, сохраняющего траекторию однонаправленного перемещения тракторного агрегата, не обеспечивающего возможности непосредственного, разнонаправленного регулирования траектории тракторного агрегата.
Данный тракторный агрегат имеет сравнительно низкий технический уровень по конструкции прицепного устройства, не обеспечивающего прямой возможности разнонаправленного управления траекторией рабочего движения тракторного агрегата, что ухудшает управляемость тракторного агрегата и его надежность в целом.
В этой связи важнейшей задачей является создание новой надежной конструкции тракторного агрегата, содержащей новый, эффективный механизм разнонаправленного управления траекторией рабочего движения тракторного агрегата в загоне, позволяющий быстро и точно выходить на заданную траекторию рабочего движения агрегата на гоне вследствие смены направления рабочего движения после разворота в конце загона с целью перехода на новый гон, а также позволяющей поддерживать технологически заданную (прямолинейную) траекторию установившегося рабочего движения на новом гоне.
Техническим результатом заявленного изобретения является создание принципиально новой конструкции тракторного агрегата с оригинальной горизонтально-поворотной системой управления траекторией его рабочего движения, элементы которой функционируют при управляющем воздействии, формируемом с помощью гидроцилиндра, на направление движения трактора и агрегатируемого с ним сельскохозяйственное орудие в режиме вывода тракторного агрегата на траекторию установившегося (прямолинейного) рабочего движения, что улучшает управляемость тракторного агрегата, повышает его производительность и, следовательно, надежность в целом.
Указанный технический результат достигается тем, что в тракторном агрегате, состоящем из гусеничного трактора, снабженного механизмом поворота с режимом дифференциальной связи гусениц, агрегатируемого орудия и прицепного устройства, снабженного управляющим гидроцилиндром, прицепное устройство, выполнено в виде поворотной рамы, шарнирно установленной своим передним концом на остове трактора симметрично относительно левой и правой гусениц и шарнирно соединенной своим задним концом с агрегатируемым орудием с возможностью перемещений орудия в вертикальной плоскости, взаимодействующей с остовом трактора посредством шарнирно установленного управляющего гидроцилиндра и взаимодействующей с поперечной опорной рамкой, закрепленной на остове трактора, создавая адаптивное (зависящее от агрофона) управление кривизной траектории тракторного агрегата.
Вследствие того, что поворотная рама установлена своим передним концом на остове трактора симметрично относительно левой и правой гусениц, обеспечивается равенство составляющих тягового усилия, создаваемого агрегатируемым орудием, действующих на левую и правую гусеницы трактора.
Вследствие того, что поворотная рама соединена своим задним концом с агрегатируемым орудием и одновременно посредством гидроцилиндра связана с остовом трактора, обеспечивается возможность разнонаправленного изменения взаимного углового положения трактора и агрегатируемого с ним орудия, что приводит к появлению отклоняющего момента, уравновешивающего разворачивающий момент, возникающий за счет разности сил тяги левой и правой гусениц имеющих при неуправляемом движении жесткую связь и разные коэффициенты сцепления по той причине, что при рабочем движении тракторного агрегата на гоне гусеницы перемещаются на разном расстоянии от кромки борозды, оставленной при предыдущем рабочем движении тракторного агрегата на гоне: левая - на расстоянии, превышающем колею трактора в условиях хорошо связанного грунта, и правая - на расстоянии, не превышающем ширину гусеницы в условиях менее связанного грунта из-за близости указанного участка к стенке борозды предыдущего технологического прохода тракторного агрегата, а вследствие того, что поворотная рама соединена своим задним концом с агрегатируемым орудием с возможностью перемещения орудия в вертикальной плоскости обеспечивается возможность копирования орудием неровностей поверхности обрабатываемого поля, и исключается влияние вертикальных колебаний остова трактора, возникающих при его движении по неровностям поверхности поля, на рабочие параметры агрегатируемого орудия, что в совокупности является необходимым и достаточным условием для обеспечения возможности поддержания технологически заданной (прямолинейной) траектории рабочего движения тракторного агрегата на гоне.
Благодаря принципиально новой схеме тракторного агрегата с прицепным устройством, выполненным в виде продольной поворотной рамы, двух продольных тяг и управляющего гидроцилиндра, возникает возможность быстрого и точного вывода на технологически заданную (прямолинейную) траекторию рабочего движения тракторного агрегата после его разворота в конце загона с целью перехода на новый, технологически заданный гон, что улучшает управляемость тракторного агрегата, повышает его производительность и, следовательно, надежность в целом.
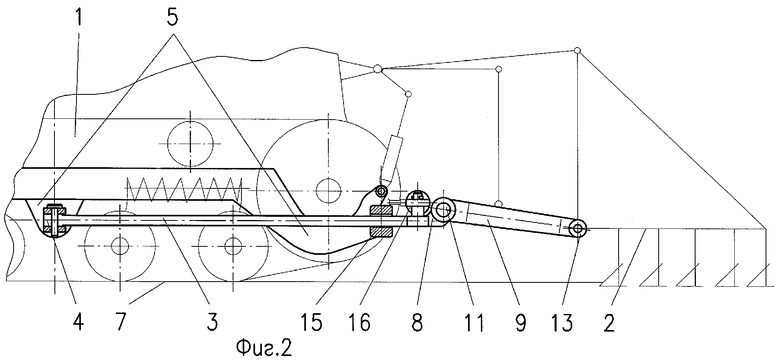
На фиг.1 изображена кинематическая схема заявляемого тракторного агрегата (вид сверху); на фиг.2 - вид А на фиг 1.
Тракторный агрегат состоит из гусеничного трактора 1, являющегося ведущим звеном и источником кинетической энергии тракторного агрегата, агрегатируемого орудия 2, являющегося техническим средством для выполнения сельскохозяйственной технологической операции и основным источником сил сопротивления передвижению тракторного агрегата, прицепного устройства, служащего для соединения трактора и сельхозорудия. Прицепное устройство выполнено в виде поворотной рамы 3, шарнирно установленной своим передним концом 4 на остове 5 трактора 1 симметрично относительно левой 6 и правой 7 гусениц трактора, а своим задним концом 8 шарнирно соединенной с агрегатируемым орудием 2 посредством левой 9 и правой 10 тяг, шарнирно связанных своими передними концами 11 и 12 с поворотной рамой 3, а своими задними концами 13 и 14 - с агрегатируемым орудием 2. Передние и задние концы левой 9 и правой 10 тяг выполнены с возможностью угловых перемещений только в вертикальной плоскости.
Для исключения возможности падения заднего конца 8 поворотной рамы 3 при отсоединении агрегатируемого орудия 2 от трактора, поворотная рама 3 своим задним концом 8 взаимодействует с опорной рамкой 15, закрепленной на остове 5 трактора 1.
Для обеспечения возможности разнонаправленного управления траекторией движения тракторного агрегата путем изменения угла, образуемого между продольными осями трактора 1 и агрегатируемого орудия 2, на заднем конце поворотной рамы 3 установлен гидроцилиндр 16, один конец которого шарнирно связан с корпусом поворотной рамы 3, а второй - с остовом 5 трактора 1.
Для снижения усилий, возникающих в шарнирных соединениях прицепного устройства тракторного агрегата в процессе управления траекторией его рабочего движения, в момент начала управляющих воздействий включается дифференциальная связь левой 6 и правой 7 гусениц.
Для обеспечения дифференциальной связи гусениц 6 и 7 на тракторе 1 предусмотрен планетарный механизм поворота с режимом дифференциальной связи ведущих звездочек гусениц.
В результате взаимодействия перечисленных выше узлов предлагаемого варианта конструктивного исполнения тракторного агрегата улучшается его управляемость, производительность и повышается надежность.
Работа предлагаемого тракторного агрегата
При неподвижном положении тракторного агрегата система управления работает следующим образом.
Остов 5 трактора 1 соединен с агрегатируемым орудия 2 с помощью прицепного устройства, состоящего из поворотной рамы 3, левой 9 и правой 10 тяг таким образом, что при неподвижном положении тракторного агрегата нет источника энергии, вызывающего перемещение тракторного агрегата вдоль его продольной оси, но есть возможность взаимного углового перемещения трактора и агрегатируемого орудия 2 посредством гидроцилиндра 16, один конец которого соединен с поворотной рамой 3, а второй - с остовом 5 трактора 1.
После подачи управляющего сигнала на гидроцилиндр 16 его шток начинает перемещаться, что приводит к изменению угла, образуемого продольными осями поворотной рамы 3 и остова 5 трактора 1. Поворотная рама 3 посредством продольных тяг 9 и 10 передает угловое перемещение на корпус агрегатируемого орудия 2 и тем самым вызывает изменение угла, образуемого между продольными осями трактора 1 и агрегатируемого с ним орудия 2. При этом, как правило, более податливо к угловому перемещению орудие 2, так как имеет меньшую по сравнению с трактором массу и при неподвижном положении тракторного агрегата (до начала рабочего движения, связанного с выполнением технологической сельскохозяйственной операции по механической обработке почвы) практически не связано с почвой.
В процессе подачи управляющего сигнала на гидроцилиндр 16 происходит взаимное угловое перемещение остова 5 трактора 1 и агрегатируемого с ним орудия 2, приводящее к изменению угла, образуемого их продольными осями. При этом, поворотная рама 3 своим передним концом 4 поворачивается относительно оси шарнира, а своим задним концом 8 скользит по основанию поперечной опорной рамки 15, а посредством тяг 9 и 10 вызывает угловое перемещение агрегатируемого орудия 2 относительно продольной оси остова 5 трактора 1, а левая 6 и правая 7 гусеницы трактора остаются в неподвижном положении.
При рабочем движении тракторного агрегата на гоне агрегатируемое орудие 2 заглублено в почву, что способствует большей податливости трактора 1 к угловому перемещению.
В процессе выполнения технологической операции на гоне левая гусеница 6 трактора 1 движется на достаточно большом расстоянии (больше колеи гусениц) от кромки борозды предыдущего прохода тракторного агрегата, а правая 7 - на расстоянии, не превышающем ширины гусеницы. Последнее приводит к неравномерности тягово-сцепных свойств упомянутых гусениц и, как следствие, к уводу трактора 1, а затем и всего агрегата в сторону борозды предыдущего прохода. После подачи управляющего сигнала на гидроцилиндр 16, происходит принудительное (возникающее вследствие перемещения штока гидроцилиндра) изменение угла, образуемого между продольными осями остова 5 трактора 1 и агрегатируемого орудия 2 в следующей последовательности: поворотная рама 3 прицепного устройства совершает угловое перемещение относительно переднего, шарнирно установленного конца 4, а своим задним концом 8 скользит по направляющим поперечной опорной рамки 15, что приводит к изменению взаимного углового положения поворотной рамы 3 и связанных с ней своими передними концами тяг 9 и 10, а с учетом того, что задние концы тяг 9 и 10 связаны с агрегатируемым орудием 2, в конечном итоге приводит к появлению разворачивающего момента, образуемого силами реакций агрегатируемого орудия на его принудительное угловое перемещение относительно оси возможных угловых перемещений переднего конца 4 поворотной рамы 3 прицепного устройства, и постепенному достижению равенства величины разворачивающего момента величине момента увода агрегата с технологически заданной прямолинейной траектории рабочего движения, приводящее в конечном итоге к стабилизации технологически заданного направления рабочего движения тракторного агрегата.
В процессе рабочего движения тракторного агрегата на гоне происходит изменения взаимного углового положения трактора 1 и агрегатируемого орудия 2 в вертикальной плоскости, вызванное неровностями поля. При этом тяги 9 и 10, связывающие агрегатируемое орудие 2 с поворотной рамой 3 совершают угловые перемещения в вертикальной плоскости, благодаря чему исключается возможность передачи вертикальных колебаний остова 5 трактора 1 на корпус прицепного орудия 2 и в связи с этим повышается качество выполняемой технологической операции.
Возможны два режима управления траекторией агрегата: а - поддержание заданного направления движения, б - вывод на технологически заданную (прямолинейную) траекторию рабочего движения тракторного агрегата.
При работе в режиме поддержания технологически заданного (прямолинейного) движения тракторного агрегата на гоне ведущие звездочки левой 6 и правой 7 гусениц трактора 1 жестко связаны. При этом, механизм поворота трактора 1 работает в режиме жесткой связи левой 6 и правой 7 гусениц.
При отклонении агрегата от технологически заданного (прямолинейного) направления рабочего движения на гоне производится текущая корректировка заданного направления в следующей последовательности: в - устанавливается дифференциальная кинематическая связь ведущих звездочек левой 6 и правой 7 гусениц трактора; г - подается управляющий сигнал на гидроцилиндр 16, что приводит к перемещению штока гидроцилиндра и, как следствие, изменению взаимного положения поворотной рамы 3 прицепного устройства и остова 5 трактора 1, а с учетом связи прицепного устройства с рамой агрегатируемого орудия 2 в конечном итоге изменяется взаимное угловое положение остова 5 трактора 1 и агрегатируемого орудия 2. Изменение взаимного углового положения остова 5 трактора 1 и агрегатируемого орудия 2 приводит к появлению стабилизирующего момента, способствующего выводу тракторного агрегата на первоначальную (прямолинейную) траекторию, после достижения указанного эффекта механизм поворота трактора переводится из режима дифференциальной связи гусениц в режим планетарного механизма поворота, обеспечивающего режим жесткой связи гусениц.
Появление жесткой связи гусениц приводит к появлению разворачивающего момента, направленного в сторону правой 7 гусеницы из-за ее худших, по сравнению с левой 6 гусеницей, сцепных свойств, объясняемых худшей связанностью грунта под правой 7 гусеницей, идущей близко от кромки борозды. При наступлении уравновешивания разворачивающего момента от изменения взаимного углового положения трактора 1 и агрегатируемого орудия 2 и разворачивающего момента из-за разности сцепных свойств левой 6 и правой 7 гусениц трактора прямолинейное движение тракторного агрегата восстанавливается.
Для вывода на технологически заданную (прямолинейную) траекторию рабочего движения тракторного агрегата потребуется многократное изменение направления описанным выше способом, что обеспечивает управляемость тракторного агрегата при выводе его на заданную траекторию и возможность регулирования траектории.
В результате взаимодействия перечисленных выше узлов в процессе рабочего движения предлагаемого тракторного агрегата улучшается его управляемость, производительность и в конечном итоге повышается надежность.
Таким образом, из приведенного описания работы предлагаемого тракторного агрегата видно, что при его использовании для выполнения сельскохозяйственных технологических операций по предпосевной механической обработке почвы в загоне заметно улучшается управляемость, существенно повышается производительность выполнения сельскохозяйственной технологической операции, особенно важные при производстве наиболее энергонасыщенной сельскохозяйственной технологической операции - пахоты, и в конечном счете повышается надежность.
Таким образом, вышеизложенное свидетельствует о выполнении при использовании заявленного изобретения следующей совокупности условий:
- тракторный агрегат, воплощающий заявленное изобретение, при его осуществлении, предназначен для выполнения сельскохозяйственных технологических операций по предпосевной обработке почвы, требующих прямолинейности движения для гарантии отсутствия непропаханных клиньев, обеспеченной только при прямолинейности борозд, оставляемых после технологических проходов;
- для заявленного изобретения, в том виде как оно охарактеризовано в формуле изобретения, подтверждена возможность его осуществления в соответствии с описанием и прилагаемыми чертежами;
- тракторный агрегат, воплощающий заявленное изобретение при его осуществлении, способен обеспечить достижение усматриваемого заявителем технического результата. Следовательно, заявленное изобретение соответствует требованию "промышленная применимость".
| название | год | авторы | номер документа |
|---|---|---|---|
| Тракторный агрегат | 1980 |
|
SU1009298A1 |
| СТАБИЛИЗИРУЮЩЕЕ УСТРОЙСТВО ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ ПРИЦЕПНОЙ АСИММЕТРИЧНОЙ МАШИНЫ | 2024 |
|
RU2835131C1 |
| НАВЕСНОЕ УСТРОЙСТВО ТРАКТОРА | 2015 |
|
RU2611837C1 |
| Механизм навески трактора | 1986 |
|
SU1355145A1 |
| ПОСЕВНОЙ КОМБАЙН | 2010 |
|
RU2430498C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ (ВАРИАНТЫ) | 2008 |
|
RU2387119C1 |
| ОБОРОТНЫЙ ПЛУГ ДЛЯ ГЛАДКОЙ ПАХОТЫ | 1992 |
|
RU2084089C1 |
| ОБОРОТНЫЙ ПЛУГ ДЛЯ ОБРАБОТКИ СКЛОНОВ | 1999 |
|
RU2152699C1 |
| РЫЧАЖНО-ШАРНИРНЫЙ ЧЕТЫРЁХЗВЕННЫЙ МЕХАНИЗМ НАВЕСКИ ДЛЯ СОЕДИНЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ОРУДИЙ И МАШИН С РАМОЙ АГРЕГАТИРУЕМОГО ТРАКТОРА | 2003 |
|
RU2246810C1 |
| ТРАНСПОРТНОЕ МОДУЛЬНОЕ СРЕДСТВО | 1992 |
|
RU2038250C1 |
Изобретение относится к сельскохозяйственным тракторным агрегатам, предназначенным для предпосевной механической обработки почвы с целью ее рыхления. Тракторный агрегат состоит из гусеничного трактора, агрегатируемого орудия, прицепного устройства, выполненного в виде поворотной рамы, шарнирно установленной своим передним концом на остове трактора симметрично относительно левой и правой гусениц и шарнирно соединенной своим задним концом с агрегатируемым орудием посредством левой и правой тяг, шарнирно соединенных своими передними концами с поворотной рамой прицепного устройства, а задними концами - с рамой агрегатируемого орудия. Шарнирные соединения выполнены с возможностью угловых перемещений только в вертикальной плоскости. Для исключения возможности падения прицепного устройства при отсоединении агрегатируемого орудия от трактора поворотная рама прицепного устройства своим задним концом взаимодействует с поперечной опорной рамкой, закрепленной на остове трактора. Для обеспечения возможности создания адаптивного управления кривизной траектории тракторного агрегата прицепное устройство снабжено управляющим гидроцилиндром, один конец которого шарнирно связан с поворотной рамой прицепного устройства, а второй - с остовом трактора. Технический результат - возможность изменять угол между продольными осями плуга и остова трактора, поддерживая тем самым устойчивое прямолинейное рабочее движение тракторного агрегата при выполнении сельскохозяйственной технологической операции на гоне. 2 ил.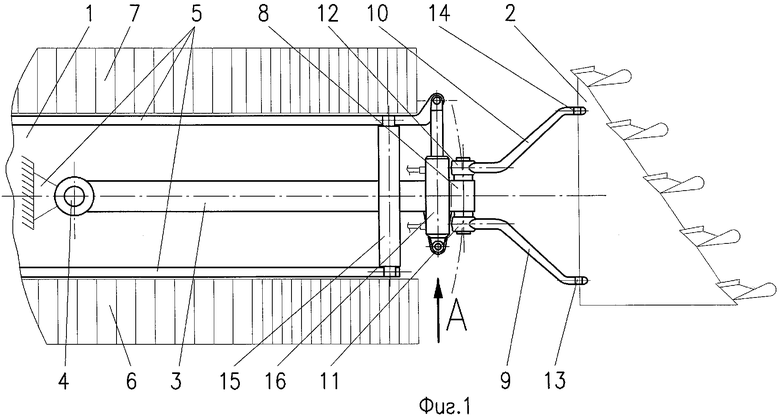
Тракторный агрегат, состоящий из гусеничного трактора, снабженного механизмом поворота с режимом дифференциальной связи гусениц, агрегатируемого орудия и прицепного устройства, снабженного управляющим гидроцилиндром, отличающийся тем, что прицепное устройство выполнено в виде поворотной рамы, шарнирно установленной своим передним концом на остове трактора симметрично относительно левой и правой гусениц и шарнирно соединенной своим задним концом с агрегатируемым орудием с возможностью угловых перемещений орудия в вертикальной плоскости, причем рама взаимодействует с остовом трактора посредством шарнирно установленного управляющего гидроцилиндра и взаимодействует с поперечной опорной рамкой, закрепленной на остове трактора, создавая адаптивное управление кривизной траектории тракторного агрегата.
| Пахотный агрегат | 1984 |
|
SU1243643A1 |

