Изобретение относится к геофизическим исследованиям скважин.
Известен способ определения отклонения буровых скважин [1], по которому производится измерение зенитного угла буровой штанги с помощью чувствительных элементов датчика, расположенных в трех взаимно перпендикулярных плоскостях. Зенитный угол скважины моделируется на поверхности.
Недостатками способа являются высокая трудоемкость из-за необходимости моделирования скважинного расположения штанги на поверхности по измеренным составляющим зенитного угла и малая точность из-за нестабильности параметров датчика.
Известен способ определения зенитного и визирного углов [2] с помощью датчика маятникового типа с индукционными преобразователями, измеряющего ортогональные составляющие β1 и β2 зенитного угла θ визирного угла ϕ, связанные следующими тригонометрическими соотношениями:
tgθ =  ; (1)
; (1)
tgϕ =  ; (2)
; (2)
tg β1=cosϕ ˙ tgθ; (3)
tgβ2 =sinϕ ˙ tgθ. (4)
К преимуществу способа относится возможность автоматизации определений зенитного и визирного углов скважины, к недостаткам - невысокая точность вычисления этих углов при изменении температуры окружающей среды.
Известен способ определения зенитного и визирного углов объекта в скважине [3] , принятый в качестве прототипа. Он включает измерение электролитическим датчиком ортогональных составляющих зенитного угла в функции преобразования:
βj=f(Kj, Uj), где j - оси чувствительности датчика;
Uj - выходной сигнал датчика, при этом коэффициент преобразования Kj датчика определяется путем установки его на известный (с высокой точностью) угол наклона, прямое измерение или вычисление зенитного и визирного углов по тригонометрическим формулам (1) и (2).
Блок-схема измерителя наклона с электролитическим датчиком цилиндрического типа включает формирователь квадратурных сигналов из опорного напряжения, которым запитаны электроды датчика. Выходные напряжения с дифференциально включенных пар электродов датчика описываются выражениями
Ux=-Uax ˙ sinω t; (5)
Uy=-Uay ˙cos ω t, (6) где Uax, Uay - амплитудные значения сигналов;
ω - круговая частота;
t - время.
Сигналы суммируются на общем сопротивлении нагрузки, и через согласующий усилитель суммарный сигнал подается на амплитудно-фазовый дискриминатор (АФД) в виде
Uин=Umин ˙ sin(ω t+ ϕин); (7)
Uоп= Umоп ˙ sin ω t, (8) где Umин и Umоп - амплитудные значения напряжения измерителя наклона и опорного генератора;
ϕин - фазовый сдвиг измерителя наклона (пропорциональный визирному углу).
АФД формирует напряжение, несущее информацию об амплитуде и фазе сигнала измерителя величины и направления наклона. Выходные напряжения АФД подаются на отклоняющие пластины х и у осциллографа через коммутатор:
Uxин=KUmин ˙ sin ϕин; (9)
Uyин=KUmин ˙ cos ϕин, (10) где K - коэффициент пропорциональности.
На экране осциллографа радиус R отклонения светового пятна от центра трубки характеризует величину угла наклона
α = R =  , (11) а угол отклонения радиуса - вектора R от вертикали - угол
, (11) а угол отклонения радиуса - вектора R от вертикали - угол
ϕин= arctg , (12) т.е. определяются по формулам, аналогичным (1) и (2), если принять, что
, (12) т.е. определяются по формулам, аналогичным (1) и (2), если принять, что
Uхин=K1tg β1; (13)
Uуин= K2tg β2, (14) где K1 и K2 - коэффициенты преобразования (или передачи) по соответствующим осям j чувствительности датчиках. Обычно они равны или немного отличаются друг от друга.
Коэффициенты К, К1, К2 определяются известным способом [4] при поверке основных погрешностей прибора, например, в поверочной установке УПН-1. С помощью поворотного стола и оптического квадранта задают действительное (точное) значение составляющей зенитного угла при нормальных по температуре (20± 5оС) условиях измерения и снимают соответствующие показания выходного сигнала вольтметром. Измеренную составляющую зенитного угла в случае датчика прототипа определяют по формуле = arctgKj·U
= arctgKj·U , (15) где θ - индекс, соответствующий определенному значению зенитного угла; Kj - коэффициенты преобразования по осям j, определяемые как отношение величины тангенса верхнего предела измерения угла βаj в градусах к соответствующему напряжению в вольтах Uaj:
, (15) где θ - индекс, соответствующий определенному значению зенитного угла; Kj - коэффициенты преобразования по осям j, определяемые как отношение величины тангенса верхнего предела измерения угла βаj в градусах к соответствующему напряжению в вольтах Uaj:
Kj=  , (16)
, (16)
При поверке с высокой точностью задается физическая величина угла наклона βаj датчика в плоскости каждой из его осей чувствительности, по которой определяются коэффициент передачи датчика, а также систематическая и случайная составляющие его основной погрешности. К преимуществам способа-прототипа следует отнести высокую точность измерения угла наклона, к недостатку - значительную зависимость выходного сигнала от изменения температуры среды, окружающей датчик.
Относительное изменение напряжения на выходе датчика дифференциальной ортогональной пары электродов от изменения его температуры может быть описано формулой
ΔU(t) =  =
=  , (17) где η - температурный коэффициент объемного расширения электролита;
, (17) где η - температурный коэффициент объемного расширения электролита;
Δ t - разность температур,
to - начальная температура.
Для реальных датчиков с электролитами различного химического состава изменение выходного сигнала за счет изменения коэффициента передачи датчика при повышении температуры от 20 до 200оС составляет до 30% от верхнего предела измерения. Поэтому обеспечить необходимую точность измерения кривизны скважины таким датчиком невозможно.
Целью изобретения является повышение точности определения зенитного и визирного углов скважины при изменении температуры среды, окружающей датчик.
Цель достигается тем, что по способу определения зенитного и визирного углов скважины электролитическим датчиком, включающему измерение выходного сигнала Uj дифференциально включенными ортогональными парами электродов датчика по осям j его чувствительности, определение коэффициентов передачи Kj датчика путем его установки на известный угол наклона αj, измерение (вычисление) ортогональных составляющих зенитного угла в функции преобразования β αj=f(Kj, U αj) для определения основной погрешности датчика при его наклоне на угол αj,, измерение зенитного и визирного углов или их вычисление по тригонометрическим формулам, после установки датчика под углом ajпроизводится его нагревание (охлаждение) в рабочем диапазоне температур и измерение одновременно с сигналом Uij дифференциальных пар выходного сигнала Uiz, пропорционального электрическому сопротивлению ziпараллельно включенной ортогональной пары электродов датчика, вычисляется действительное (текущее) значение коэффициентов передачи Kijдифференциально включенных ортогональных пар электродов, составляется непрерывная зависимость
Kij= f(Uiz), (18) которая используется для вычисления ортогональных составляющих зенитного угла в функции преобразования:
βij= f(Kij(Uiz), Uij, (19) где i - момент времени измерения, при этом выходной сигнал может быть пропорционален только активной или только реактивной составляющей параллельно включенных ортогональных пар электродов.
В результате способ приобретает качественно новое содержание и позволяет расширить область его применения для геофизических исследований высокотемпературных скважин, при этом обеспечивается высокая точность измерения ортогональных составляющих зенитного угла и конечного результата - зенитного и визирного углов независимо от температурной нестабильности и инерционности датчика.
Известны технические решения, в которых имеются признаки, сходные с заявленными в предлагаемом способе. Так, например, известен способ контроля температуры геофизических датчиков при помощи дистанционных термометров [5] . Термодатчик устанавливается на корпус геофизического датчика, при этом устанавливается зависимость изменения коэффициента передачи геофизического датчика от изменения его температуры. Установленная зависимость служит для внесения поправок в показания датчика на температуру окружающей среды. Однако осуществить такой контроль температуры электролитического датчика зенитного угла сложно. Кроме того, он не обеспечивает заданной точности измерения в динамике, т.е. при изменении температуры окружающей среды при перемещении прибора по скважине. Основным препятствием здесь является тепловая инерция датчика, обусловленная высокой теплостойкостью электролита и его малой теплопроводностью.
В способе [2] для датчика зенитного угла маятникового типа определение основной погрешности измерения и вычисление ортогональных составляющих при проверке производится в функции преобразования:
β αj=KjU αj.
Паспортное значение коэффициента Kj определяется в поверочной установке при нормальных условиях измерения (20± 5оС), при этом измеряется еще один выходной сигнал от датчика, представляющего собой такой же (идентичный) измерительный элемент, что и служащий для измерения составляющих зенитного угла по осям j. Однако ось вращения этого дополнительного элемента жестко зафиксирована под углом по величине близким к верхнему пределу измерения зенитного угла. Выходной сигнал дополнительного элемента используется в качестве стандарт-сигнала, значение физической величины которого в градусах аjст.с, определяется (вычисляется) по каждой из осей чувствительности датчика во время поверки.
Рассчитанная физическая величина стандарт-сигнала используется для уточнения величины коэффициентов преобразования Kjt датчика, которые изменяются под воздействием изменяющейся температуры t окружающей среды при перемещении датчика в скважине:
Kjt =  , (20) поскольку аjст.с. величина постоянная,
, (20) поскольку аjст.с. величина постоянная,
Kjt=f(Uijст.с.), (21) а значение составляющей рассчитывается как
βij=Kjt U*ij=f(Kjt(Uijст.с.), U*ij... (22)
Как видно, формулы (19) и (22) схожи. Отличие предлагаемого способа заключается в том, что коэффициент Kij определяется выходным сигналом, пропорциональным изменяющемуся импедансу параллельно включенной пары электродов по соответствующей оси чувствительности, т.е. по той же паре электродов, по которой выполняется измерение самой составляющей βij.
В техническом решении аналога коэффициент Kjt определяется выходным сигналом элемента, слабо отражающим состояние основных (рабочих) элементов-маятников, связанных с преобразователями угла поворота. Общим для них можно рассматривать только степень идентичности тройки индукционных преобразователей угла поворота. Однако сделать совершенно идентичными индукционные преобразователи практически невозможно. Поэтому предложенное техническое решение имеет значительные преимущества по точности, а также упрощает техническое исполнение (не нужен дополнительный элемент для организации стандарт-сигнала).
Таким образом, ни одно из решений прототипа или аналогов не позволяет осуществить точное измерение зенитного и визирного углов скважины при изменении температуры среды, окружающей датчик.
Только установка электрического датчика на известный угол βaj, его нагревание (охлаждение) в рабочем диапазоне температур и дополнительное измерение выходного сигнала Uiz, пропорционального электрическому сопротивлению параллельно включенной пары ортогональных электродов датчика, вычисление действительных значений коэффициентов передачи Kijдифференциально включенных ортогональных пар электродов, составление непрерывной зависимости Kij= f(Uiz) и ее использование для вычисления ортогональных составляющих зенитного угла скважины в функции преобразования
βij= f(Kij(Uiz), Uij) позволяют достичь принципиально нового эффекта и цели. Поэтому предложенное решение обладает существенными отличиями.
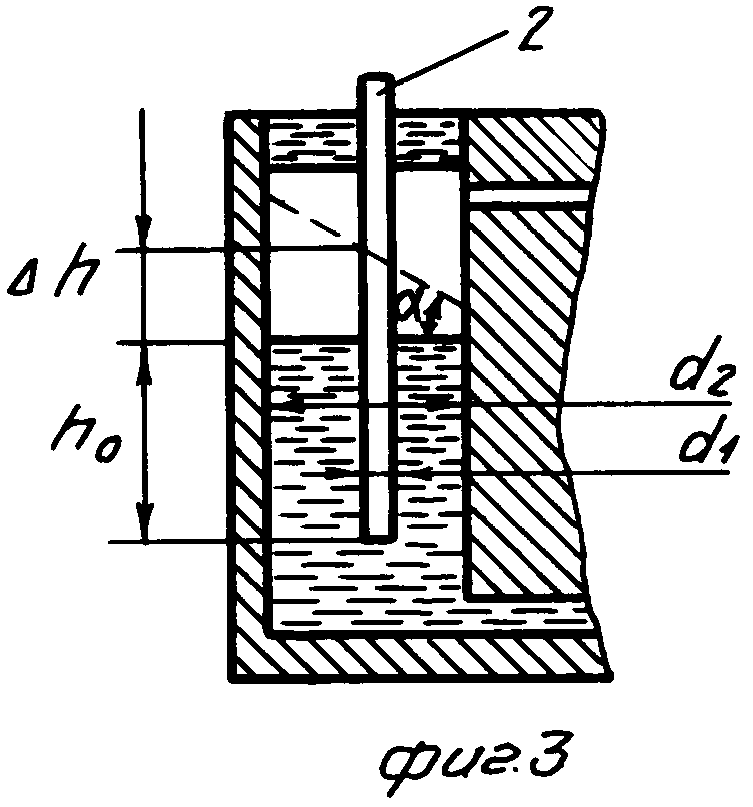
Предложенный способ реализуется с помощью электролитического датчика с электролитическими ячейками цилиндрической формы (фиг.1-3) и электрической схемы (фиг.4). Датчик содержит корпус 1 с двумя парами ортогональных электролитических ячеек А, В и М, N, расположенных симметрично относительно центра на расстоянии r. Ячейки образованы корпусом 1 из проводящего материала и электродами 2 на изоляторах 3. Ячейки связаны между собой отверстиями 4, образуя сообщающиеся сосуды. Полость ячеек заполнена электролитом 5.
В вертикальном положении датчика площади So электродов 2 ячеек, смачиваемые электролитом 5, равны между собой. Площади наружного (корпуса) и внутреннего (центрального) электродов ячейки различны, поэтому определяющей для работы является площадь меньшего электрода, т.е. So.
Расстояние между электродами (фиг.3) d=(d1-d2)/2, где d1 - диаметр центрального электрода; d2 - диаметр ячейки в корпусе. Электрическое сопротивление столба электролита высотой ho (вертикальное положение датчика) имеет величину
Ro=  , (23) где ρ - удельное электрическое сопротивление электролита.
, (23) где ρ - удельное электрическое сопротивление электролита.
При наклоне датчика уровень электролита занимает новое положение ho + Δh, т. е. изменяется на величину Δh, при этом площадь электрода, смоченная электролитом, равно So +Δ S, и сопротивление столба электролита становится равным =
=  , (24) где γ - проводимость электролита.
, (24) где γ - проводимость электролита.
Запишем значение этого сопротивления для каждой электролитической ячейки датчика при наклоне его на угол α (фиг.5) и повороте вокруг оси 001 на угол ϕ относительно направления АВ, проведенного через центры электродов ячеек А и В. На фиг.5 показано расположение четырех электролитических ячеек А, В, М, N по направлениям соответственно АD, ВF, MK, NL, где r - радиус цилиндра, проведенного через центры ячеек.
Если пренебречь поперечными размерами центральных электродов, то при наклоне на угол α цилиндра изменение смачиваемой поверхности электродов А и В определяется отрезками АА'=rtg α и ВВ'=,rtg α и
Δ SA( ϕ =0) =πd1rtg α ; (25)
Δ SB( ϕ =180o)=- πd1rtg α. (26)
При наклоне цилиндра на угол α и одновременном повороте его на угол ϕ электроды занимают новое положение, а изменение площадей их смачивания определится как
Δ SA= πd1rtg α ˙cos ϕ ; (27)
Δ SB=- πd1rtgα ˙cos ϕ ; (28)
Δ SM=- πd1rtgα ˙sin ϕ (29)
Δ SN= πd1rtg α ˙sin ϕ . (30)
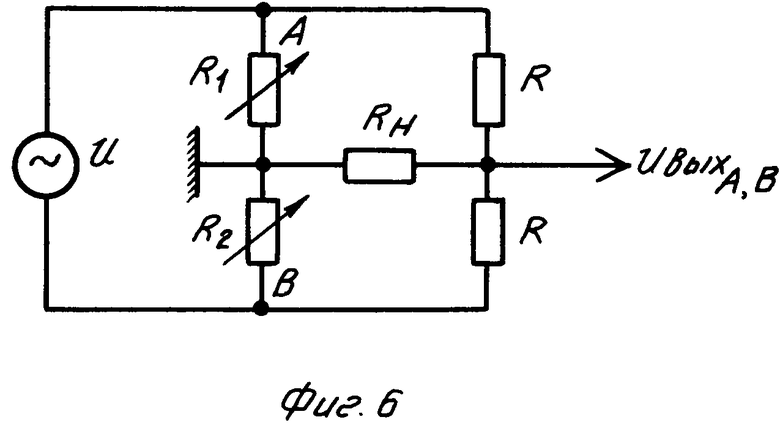
На фиг.6 приведена дифференциальная схема включения датчика наклона для пары измерительных ячеек А и В. Здесь U - переменное напряжение генератора для питания мостовой схемы, R1 и R2 - сопротивления электролитических ячеек датчика наклона, которые в общем случае могут иметь комплексный характер, R - дополнительные сопротивления моста, Rн - сопротивление нагрузки. Корпус датчика заземлен.
Для получения выражения выходного сигнала дифференциальной пары электродов можно воспользоваться методом холостого хода и короткого замыкания:
Uвыхxx=  -
-  =
=  ; (31)
; (31)
Rвхк3=  +
+  . (32)
. (32)
Ток на сопротивлении нагрузки
J =  . (33)
. (33)
Выходное напряжение
UвыхA,B= -JRн=  . (34)
. (34)
Так как
R1=  и R2=
и R2=  и обозначив через
и обозначив через
С= πd1r/2 постоянный коэффициент, зависящий от геометрических размеров датчика, и полагая, что
Rн> > R1, R2 и R, получают следующее выражение для выходного сигнала дифференциальной пары:

 .
.
Из него видно, что выходной сигнал дифференциальной пары не зависит от электропроводности электролита. Однако сохраняется зависимость выходного напряжения от параметра So, т.е. уровня электролита, который с изменением температуры окружающей среды не остается постоянным.
Если обеспечить стабильным напряжение U генератора и обозначить через K(t) = -  , т.е. So=f(t), то получают
, т.е. So=f(t), то получают =
= K
K

(35)
Решение системы уравнений (35) в отношении α и ϕ возможно при известном K(t).
Следовательно, выходной сигнал дифференциальной пары электродов является функцией угла наклона α , апсидального (визирного) угла ϕ и температуры, так как K(t)=f(t).
Зависимость K(t) может быть описана выражением
K(t)= a1-b1ec1t, (36) где а1, b1, c1 - положительные числа аппроксимации.
Для оценки выходного сигнала параллельно включенной ортогональной пары электродов обращаются к формуле (23).
Можно записать, что =
=  +
+  , (37) где RA||B - сопротивление параллельно включенной ортогональной пары электродов ячеек А и В.
, (37) где RA||B - сопротивление параллельно включенной ортогональной пары электродов ячеек А и В.
При идентичности геометрических размеров электродов 2 (фиг.1) ячеек А и B SoA = SoB=So; ΔSA = ΔSB, следовательно, из выражения (37) можной найти
RA∥B=  . (38)
. (38)
Как видно из уравнения (38), сопротивление RA||B параллельно включенной идеальной ортогональной пары электродов не зависит от углов α и ϕ .
В общем случае можно записать
RA∥B=  ; RM∥N=
; RM∥N=  , (39) где <N>rhot - электрическое удельное сопротивление электролита при фиксированной температуре t; St - уровень смоченной поверхности электродов при вертикальном датчике и фиксированной температуре t электролита.
, (39) где <N>rhot - электрическое удельное сопротивление электролита при фиксированной температуре t; St - уровень смоченной поверхности электродов при вертикальном датчике и фиксированной температуре t электролита.
При параллельном включении ячеек А, В, М, N
RA∥B∥M∥N=  . (40)
. (40)
Таким образом, сопротивление параллельно включенных ортогональных пар электродов определяется электрическим и удельным сопротивлением электролита <N>rhot и параметром St. Оба эти параметра зависят от температуры электролита. Причем с увеличением температуры параметр <N>rhot уменьшается по величине, а параметр St увеличивается, воздействуя таким образом, что RA||B уменьшается, т. е. воздействуют оба в одну и ту же сторону, увеличивая эффект от влияния температуры окружающей среды.
Измерение RA||B может быть выполнено также по мостовой измерительной схеме на переменном токе питания:
RA∥B- Ro= C = K1UA∥B, (41) где UA||B - напряжение с выхода измерительной диагонали моста; I - ток питания; С1 - константа; R - сопротивление пассивного плеча, равное по величине такому сопротивлению активного плеча, при котором UA||B=0. Коэффициент K1 численно равен разности RA||B-Ro, bOM, при напряжении на выходе моста 1 В.
= K1UA∥B, (41) где UA||B - напряжение с выхода измерительной диагонали моста; I - ток питания; С1 - константа; R - сопротивление пассивного плеча, равное по величине такому сопротивлению активного плеча, при котором UA||B=0. Коэффициент K1 численно равен разности RA||B-Ro, bOM, при напряжении на выходе моста 1 В.
В общем случае, учитывая реактивный (емкостный) характер сопротивления электролитической ячейки, можно записать
UZ=UA∥B=K1Z=f(t), (42) где Z =  .
.
Если установить датчик под известным углом наклона βa и развернуть его вокруг собственной оси так, чтобы угол ϕ оказался равным нулю, т.е. установить в апсидальную плоскость ячейки А, В под углом βa=α, и, нагревая (охлаждая) датчик в рабочем диапазоне температур, одновременно измерить сигналы UAB и UA||B, то получают следующую зависимость для дифференциального выхода AB:
UABi= K1(ti)tgβa; K1(ti) =  . (43)
. (43)
Аналогичная операция с установкой в апсидальную плоскость ячеек MN( ϕ= 90o) дает
UMNi= K2(ti)tgβa; K2(ti) =  . (44)
. (44)
Или в общем виде уравнения (43) и (44) имеют вид
Kij(ti) =  . (45)
. (45)
Если β aj =45o, то Kij(ti)=Uij.
Для параллельного выхода имеют
UA||Bi=Uiz=K3zi. (46)
По результатам вычисления по формуле (45) и с учетом выражения (46) строится непрерывная зависимость
Kij = f(Uiz). (47)
Эта зависимость имеет вид графика (фиг.7).
Вычисление ортогональных составляющих зенитного угла скважины проводится по формуле
βij= f(Kij(Uiz), Uij), значение Kij в которой определяется по измеренному в скважине значению Uiz с использованием зависимости (47).
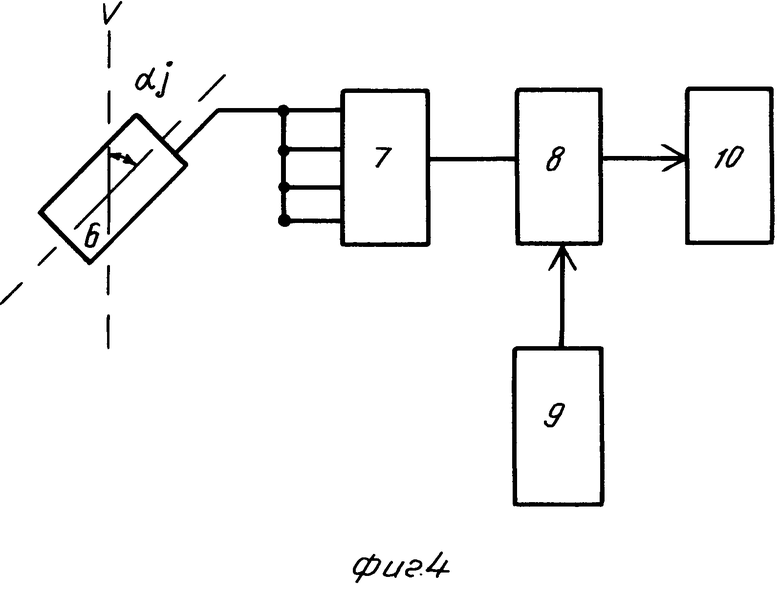
Электрическая схема (фиг.4) включает электролитический датчик 6, электроды которого через коммутатор 7 и мостовую цепь 8 подключены к генератору 9. Выход мостовой цепи подключен к цифровому вольтметру 10. Все элементы схемы или часть из них могут быть размещены в скважинном приборе. Мостовая цепь 8 и коммутатор 7 позволяют измерить с помощью вольтметра 10 сигналы датчика 6, пропорциональные импедансам дифференциального и параллельного включения ортогональных пар электродов. Для снятия зависимости Kij=f(zi) может быть использована камера тепла и холода, в которой датчик устанавливается под известным с высокой точностью углом наклона аj.
Предложенный способ реализуется следующей последовательностью операций.
Датчик устанавливается в камере тепла и холода на известный угол наклона аj=45o (или близкий к верхнему пределу измерения) в плоскости чувствительности j любой пары. Температура в камере устанавливается нормальной в пределах 20± 5о. Определяется коэффициент передачи датчика по дифференциальному выходу j при нормальной температуре. При aj=45 Kj =  αj датчика в рабочем диапазоне углов, при этом определяется основная погрешность датчика
αj датчика в рабочем диапазоне углов, при этом определяется основная погрешность датчика =αj-
=αj- , где βαj=f(Kj, Uαj ).
, где βαj=f(Kj, Uαj ).
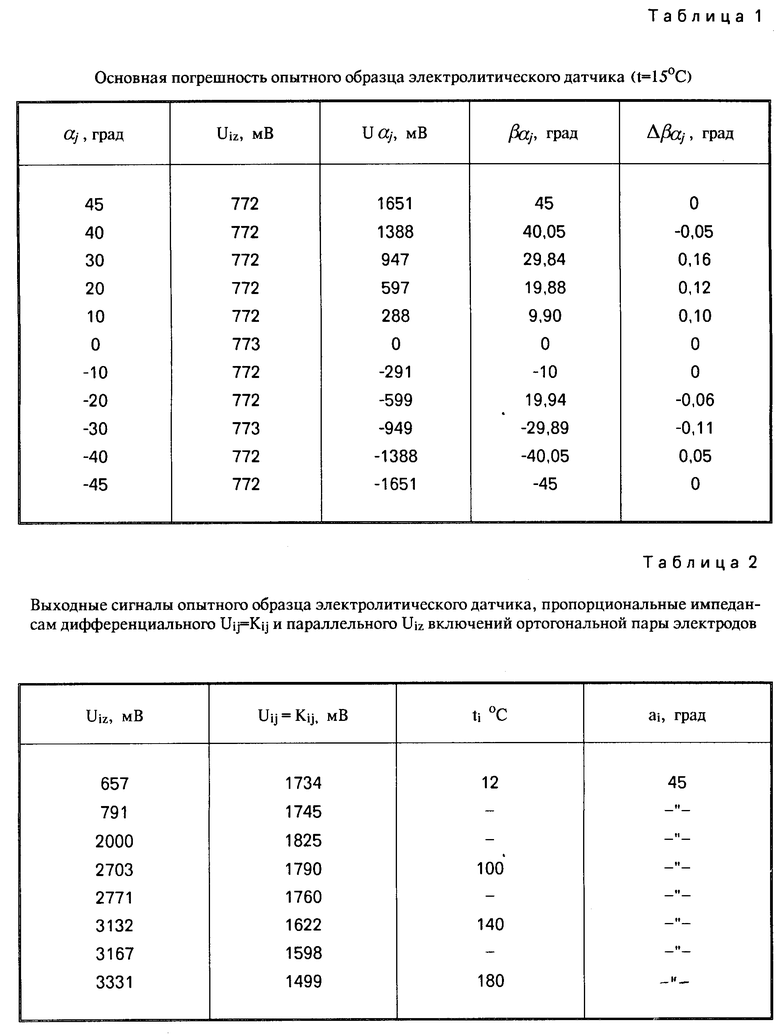
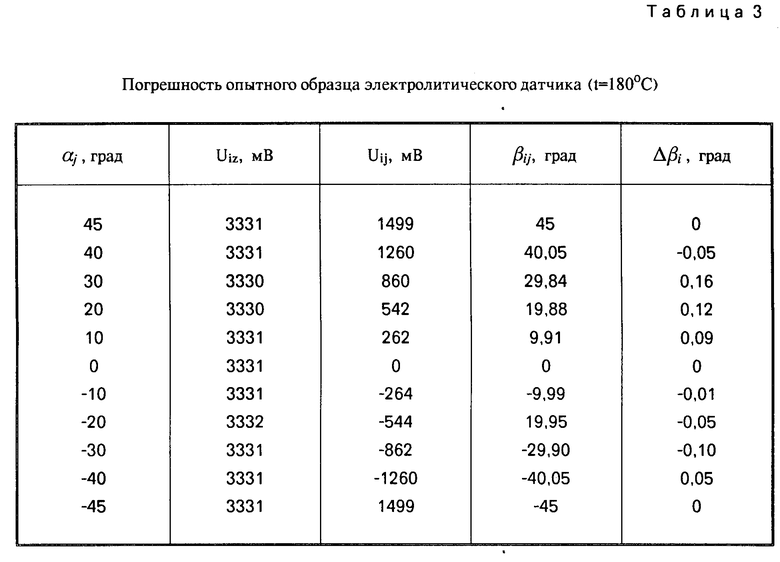
Результаты определения параметров для опытного образца датчика сведены в табл.1.
Датчик снова устанавливается под углом наклона aj=45o, и производится его нагревание (охлаждение) в рабочем диапазоне температур датчика с одновременным (в пределах быстродействия коммутатора) измерением выходных сигналов Uij и Uiz, пропорциональных импедансам дифференциально и параллельно включенных ортогональных пар электродов. Данные измерения для опытного образца датчика сведены в табл.2. По данным измерения составляется непрерывная зависимость Kij= f(Uiz). Для опытного образца датчика она представлена на фиг.7.
Прибор опускается в скважину, и производится во время подъема или спуска непрерывное измерение сигналов Uiz и Uij датчика.
Составляющая угла наклона скважины определяется по формуле
βij=f(Ki)(Uiz), Uij, или для электрического датчика цилиндрической формы по формуле
βij= arctg .
.
Результаты измерения, аналогичные скважинным, при температуре среды 180оС, окружающей опытный образец датчика, при различных углах его наклона сведены в табл.3. Моделирование скважинных условий выполнено в камере тепла и холода, при этом значение угла наклона аj задано с точностью до одной угловой минуты. Оценка точности и работоспособности способа проведена по сопоставлению погрешности измерения датчиком при t=180oC с основной погрешностью при t=15oC.
Из сопоставления данных табл.1 и 3 видно, что основная погрешность датчика Δ βαj при нормальной температуре (t=15oC) и погрешность Δ βij при рабочей температуре 180оС небольшие по величине. Они не превышают величины 0,16о. Из основной погрешности может быть выделена систематическая составляющая для учета в результатах измерения. В данном примере случайная погрешность не превысила величины 0,01о.
Вычисление зенитного и визирного углов для любого момента времени производится по формулам, аналогичным формулам (1) и (2).




Использование: геофизические исследования скважин для определения зенитного и визирного углов скважины. Сущность изобретения: электролитический датчик с двумя парами ортогональных электродов устанавливают на известный угол  вдоль одной из осей чувствительности. Нагревают (охлаждают) его в рабочем диапазоне температур. Измеряют одновременно сигналы Uij дифференцированно включенных ортогональных пар электродов, пропорциональные коэффициентам передачи Kij , и выходной сигнал Uiz , пропорциональный электрическому сопротивлению параллельно включенной пары ортогональных электродов. Составляют непрерывную зависимость Kij= f Uiz , которую используют для вычисления ортогональных составляющих зенитного угла скважины в функции преобразования: βij = f(Kij(Uiz), Uij) . Выходной сигнал Uiz используют как пропорциональный только активной или только реактивной составляющей параллельно включенной ортогональной пары электродов. 1 з. п. ф-лы, 3 табл., 7 ил.
вдоль одной из осей чувствительности. Нагревают (охлаждают) его в рабочем диапазоне температур. Измеряют одновременно сигналы Uij дифференцированно включенных ортогональных пар электродов, пропорциональные коэффициентам передачи Kij , и выходной сигнал Uiz , пропорциональный электрическому сопротивлению параллельно включенной пары ортогональных электродов. Составляют непрерывную зависимость Kij= f Uiz , которую используют для вычисления ортогональных составляющих зенитного угла скважины в функции преобразования: βij = f(Kij(Uiz), Uij) . Выходной сигнал Uiz используют как пропорциональный только активной или только реактивной составляющей параллельно включенной ортогональной пары электродов. 1 з. п. ф-лы, 3 табл., 7 ил.
βij = f (Kij(Uiz) , Uij) ,
где i - момент времени измерения.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кривко Н.Н | |||
| и др | |||
| Промыслово-геофизическая аппаратура и оборудование | |||
| М.: Недра, 1981, с.32-38. | |||
