ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к системам управления ядерными реакторами.
УРОВЕНЬ ТЕХНИКИ
Опасность ядерного реактора выражается в возможности вредного воздействия на население, окружающую среду и обслуживающий ядерный реактор персонал. Государственное регулирование деятельности в области ядерных реакторов устанавливает в технических регламентах допустимые и недопустимые уровни вредного воздействия ядерных реакторов. Этим уровням соответствуют допустимые и недопустимые значения параметров, определяющих опасность ядерного реактора. Границей между допустимыми и недопустимыми значениями этих параметров являются пределы безопасной эксплуатации. В соответствии с техническими регламентами в проектах ядерных реакторов установлены эксплуатационные пределы и условия, соответствующие нормальной эксплуатации, и предусмотрены технические средства, обеспечивающие недостижение пределов безопасной эксплуатации при нарушениях нормальной эксплуатации, в том числе средства автоматической остановки реактора.
Основой управления ядерным реактором является управление реактивностью, определяющей изменение мощности ядерного реактора: положительная реактивность обеспечивает увеличение мощности, отрицательная - снижение мощности. Увеличение положительной реактивности выше определенного значения ведет к потере управляемости ядерного реактора, поэтому технические регламенты требуют не превышать допустимый уровень реактивности и допустимую скорость увеличения реактивности. Эти требования технических регламентов обеспечиваются техническими средствами, предусмотренными в проектах ядерных реакторов. Для обеспечения недостижения пределов безопасной эксплуатации при нарушениях нормальной эксплуатации средства автоматической остановки ядерного реактора обеспечивают скорость уменьшения реактивности, намного более высокую по сравнению с допустимой скоростью увеличения реактивности. Управляемое изменение реактивности осуществляется перемещением рабочих органов воздействия на реактивность. Наиболее распространены рабочие органы в виде продольно перемещаемых стержней. В корпусном ядерном реакторе рабочие органы расположены внутри корпуса реактора.
Известна система защиты ядерного реактора, содержащая верхний и нижний регулирующие стержни, связанные между собой гибким элементом, перекинутым через узел вращения, для обеспечения их встречного движения, и фиксатор, причем масса верхнего стержня больше массы нижнего стержня (см. авторское свидетельство SU №1657020, кл. G 21 С 7/08, 20.05.1996).
Данная система позволяет в аварийных ситуациях расфиксировать верхний стержень, который под действием силы тяжести опускается в активную зону, а нижний стержень при этом поднимается навстречу верхнему стержню. Однако данная система не позволяет провести остановку работы ядерного реактора в случае неправильных действий персонала, управляющего работой ядерного реактора, что сужает область использования данной системы.
Наиболее близкой к изобретению по технической сущности и достигаемому результату является система управления ядерным реактором, содержащая устройство выбора, устройство контроля и устройство управления рабочими органами - управляющими стержнями, причем устройство выбора предусматривает выбираемую последовательность перемещения рабочих органов для каждого заданного управляющего воздействия, и соединено с устройством управления рабочими органами для передачи сигналов выбора, приданных в каждом случае выбранной последовательности действий, при этом устройство контроля контролирует с учетом приданных соответствующей последовательности действий структурных признаков активной зоны реактора и управляющих рабочих органов - управляющих стержней, в частности, соседних связей управляющих стержней, сигналы выбора на допустимость и в случае допустимости передает сигнал разрешения на устройство управления стержнями, а устройство управления стержнями вызывает перемещение управляющих стержней согласно сигналам выбора (см. патент US №5818892 A, кл. G 21 C 7/12, 06.10.1998).
Данная система дает возможность предотвратить аварию на ядерном реакторе при случайной ошибке в действии обслуживающего реактор персонала. Однако данная система не дает возможности предотвратить сознательные действия персонала по переводу работы реактора в сторону увеличения реактивности, что может иметь место, например при захвате семей персонала террористической группой, которая сознательно заставляет управляющий ядерным реактором персонал перевести его работу в режим увеличения реактивности с последующей потерей управляемости ядерного реактора.
Под диверсионным управлением ядерным реактором, например в результате проникновения террористической группы в места проживания персонала, понимается квалифицированное воздействие (например, персонала, принуждаемого террористами путем захвата семей персонала) на средства управления ядерным реактором, имеющее целью достижение недопустимых значений параметров, определяющих опасность ядерного реактора (нарушение пределов безопасной эксплуатации). В условиях охраняемого объекта, на котором эксплуатируется ядерный реактор, охрана объекта воспрепятствует диверсионному управлению при наличии явных для охраны признаков такого управления. Поэтому продолжительность диверсионного управления ядерным реактором ограничена временем появления таких признаков. При участии в диверсии допускающих лиц из смены явными для охраны признаками могут быть сообщения персонала и признаки, которые отмечаются средствами охранного наблюдения: взлом стен, дверей, окон, люков, наличие огня, дыма, пара или повышенной радиации в помещениях, недопустимое изменение температуры или влажности атмосферы помещений, повреждение охранных систем.
Наиболее вероятно обнаружение диверсионного управления ядерным реактором по сообщению персонала при заступлении на дежурство новой смены персонала. Террористическое принуждение всего персонала к диверсионному управлению ядерным реактором по сути является нападением на места проживания персонала и пресекается внешней охраной объекта. Террористическое принуждение какой-либо одной смены персонала к диверсионному управлению ядерным реактором следует рассматривать как единичный отказ системы внешней охраны объекта. По принятой в технических регламентах логике безопасность ядерного реактора должна быть обеспечена при исходном событии и при независимом от исходного события единичном отказе. Следуя этой логике, возможно принуждение к диверсионному управлению ядерным реактором двух смен персонала подряд (принуждение одной смены - исходное событие, принуждение второй смены - дополнительный единичный отказ системы охраны). При общепринятой 8-часовой продолжительности рабочей смены это означает 16-часовую продолжительность диверсионного управления ядерным реактором.
Наиболее уязвимыми для диверсионного управления ядерным реактором являются расположенные вне корпуса ядерного реактора элементы системы управления, поскольку их расположение допускает возможность быстрой (по сравнению с продолжительностью рабочей смены) замены. В то же время именно расположенные вне корпуса ядерного реактора элементы системы управления обеспечивают в аналогах ограничение уровня реактивности и скорости увеличения реактивности при одновременном обеспечении высокой скорости уменьшения реактивности.
Известны устройства прямодействующей (пассивной) аварийной защиты (остановки) ядерного реактора, в которых не используется внешняя цепь контроля и управления, а рабочие органы приводятся в движение в сторону уменьшения реактивности после срабатывания устройств типа двухпозиционного переключателя, имеющего два фиксированных состояния в зависимости от положения управляющего элемента переключателя относительно критического положения, соответствующего достижению критического значения одним из параметров, определяющих пределы безопасной эксплуатации реактора: нейтронного потока и/или температуры теплоносителя реактора и/или давления теплоносителя реактора и/или расхода теплоносителя реактора (см. журнал "Атомная техника за рубежом", 1988, №1, с.10-16). Эти устройства не выполняют функцию ограничения скорости увеличения реактивности при одновременном обеспечении высокой скорости уменьшения реактивности, поэтому в случае диверсионного управления ядерным реактором они должны срабатывать при большой скорости увеличения реактивности. В то же время в этих устройствах управляющие элементы двухпозиционных переключателей не связаны напрямую с тепловыделяющими элементами (ТВЭЛ) реактора, известны лишь варианты со связью управляющих элементов с включенными в состав устройств дополнительными ТВЭЛ, отличающимися от ТВЭЛ реактора размерами и конструкцией. Поскольку технические регламенты определяют пределы безопасной эксплуатации ядерного реактора по количеству и величине дефектов ТВЭЛ реактора, то основным путем диверсионного нарушения пределов безопасной эксплуатации является разрушение ТВЭЛ реактора в результате превышения допустимой температуры ТВЭЛ. Быстродействие и чувствительность при определении температуры ТВЭЛ реактора управляющими элементами двухпозиционных переключателей, не связанных напрямую с ТВЭЛ реактора, недостаточны для обеспечения недостижения пределов безопасной эксплуатации при большой скорости увеличения реактивности, когда имеет место большой перепад температуры между ТВЭЛ и теплоносителем. Недостатками устройств, срабатывающих по расходу теплоносителя реактора, также являются возможность вскипания теплоносителя до начала движения рабочих органов и возможность ложного срабатывания при кратковременном прекращении течения теплоносителя.
Таким образом, автоматический перевод работы ядерного реактора в режим уменьшения реактивности с последующей остановкой ядерного реактора без нарушения пределов безопасной эксплуатации при нарушениях нормальной эксплуатации в случае ограниченного во времени продолжительностью двух рабочих смен, то есть 16 часами, диверсионного управления ядерным реактором является крайне важной задачей, не решенной в известных устройствах.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Техническим результатом, на достижение которого направлено настоящее изобретение, является повышение надежности работы ядерного реактора в безопасном режиме его эксплуатации путем предотвращения возможности перевода работы ядерного реактора в режим с нарушением пределов безопасной эксплуатации при 16-часовой продолжительности диверсионного управления ядерным реактором.
Технический результат достигается за счет того, что система управления корпусным ядерным реактором содержит комплект технических средств для ограничения скорости увеличения реактивности рабочими органами и для автоматической остановки ядерного реактора, включающий приводы с двигателями, связи, передающие движение от двигателей приводов к рабочим органам, причем последние расположены внутри корпуса реактора, при этом внутри корпуса реактора установлены неподвижные элементы для сцепления и расцепления с рабочими органами с возможностью перемещения рабочих органов результирующей постоянно действующих на рабочие органы сил после расцепления только в сторону уменьшения реактивности, каждый рабочий орган снабжен по крайней мере двумя приводами, один из которых общий для всех рабочих органов либо общий для группы рабочих органов и перемещающий рабочие органы в сторону увеличения реактивности до сцепления с неподвижными элементами только поочередно по одному после сцепления связи своего двигателя с выбранным рабочим органом, а другой - индивидуальный для каждого рабочего органа и расцепляющий рабочий орган с указанным неподвижным элементом в любом порядке по отношению к другим рабочим органам путем расцепления связи своего двигателя с элементом сцепления рабочего органа с указанным неподвижным элементом, комплект технических средств снабжен расположенными внутри корпуса реактора двухпозиционными переключателями с двумя фиксированными состояниями в зависимости от положения управляющего элемента переключателя относительно критического положения, соответствующего достижению критического значения одним из параметров, определяющих пределы безопасной эксплуатации реактора, связи двигателей индивидуальных приводов с элементами сцепления снабжены расположенными внутри корпуса реактора управляемыми элементами разрыва, например в виде муфты, с возможностью разрыва связей для движения рабочих органов в сторону уменьшения реактивности при состоянии двухпозиционных переключателей, соответствующем достижению критических значений параметрами, определяющими пределы безопасной эксплуатации реактора.
В этой системе непревышение допустимой скорости увеличения реактивности обеспечивается ограниченным количеством общих приводов и ограниченной эффективностью одновременно перемещаемых ими рабочих органов.
При диверсионном управлении ядерным реактором воздействия на приводы извне корпуса реактора могут быть направлены на нарушение пределов безопасной эксплуатации, в том числе на перемещение рабочих органов с максимальной скоростью в сторону увеличения реактивности и на исключение перемещения рабочих органов в сторону уменьшения реактивности. В настоящем изобретении управляемый двухпозиционными переключателями разрыв связей двигателей индивидуальных приводов с элементами сцепления рабочих органов с неподвижными элементами реактора обеспечивает приоритет действия на индивидуальные приводы параметров, определяющих пределы безопасной эксплуатации, по отношению к приходящим извне корпуса ядерного реактора воздействиям. Высокая скорость уменьшения реактивности при этом обеспечивается намного большим (по сравнению с общими приводами) количеством индивидуальных приводов и намного большей эффективностью всех рабочих органов по сравнению с эффективностью рабочих органов, которые могут быть одновременно перемещены общими приводами в сторону увеличения реактивности. Вследствие общего уменьшения реактивности происходит автоматическая остановка ядерного реактора без нарушения пределов безопасной эксплуатации при нарушениях нормальной эксплуатации в случае диверсионного управления ядерным реактором.
Таким образом, новые по сравнению с аналогами распределение функций приводов, устройство и работа связей рабочих органов с двигателями приводов, использование параметров внутри корпуса реактора обеспечивают ограничение скорости увеличения реактивности рабочими органами и автоматическую остановку ядерного реактора только с помощью элементов, расположенных внутри корпуса реактора. Поэтому для достижения цели диверсионного управления необходимо вскрыть корпус реактора, чтобы вывести из строя указанные элементы. Чтобы избежать вмешательства охраны, перед вскрытием реактор придется остановить и охладить с рабочей температуры (у большинства корпусных реакторов около 320°С) до температуры, не приводящей к недопустимым параметрам состояния помещений (около 70°С). Непревышение нормальной скорости охлаждения корпусных реакторов (15°С в час) обеспечивается ограничением числа и производительности насосов и теплообменников нормального расхолаживания. Охлаждение с 320°С до 70°С с нормальной скоростью (15°С в час) потребует более 16 часов, то есть при 16-часовой продолжительности диверсионного управления ядерным реактором расположенные внутри корпуса реактора элементы останутся недоступными для персонала, и цель диверсионного управления не будет достигнута.
Физические процессы, сопровождающие охлаждение корпусных ядерных реакторов с повышенной скоростью (выход горячего пара в атмосферу или в технологические емкости, резкое повышение температуры и/или влажности атмосферы помещений, недопустимые деформации трубопроводов) представляют собой явные для охраны признаки, требующие вмешательства. Поэтому ускоренное охлаждение ядерного реактора приведет к вмешательству охраны и прекращению диверсионного управления ядерным реактором до вскрытия корпуса реактора.
Для исключения возможности диверсионного управления ядерным реактором в период ремонта связи двигателей общих приводов с рабочими органами снабжены расположенными внутри корпуса реактора вблизи разъема корпуса элементами разрыва, например в виде муфты, с возможностью разрыва связей при размыкании разъема корпуса реактора. Расположение элемента разрыва в непосредственной близости от разъема позволяет технически просто контролировать состояние элемента разрыва средствами охранного наблюдения.
Для исключения использования при диверсионном управлении ядерным реактором, возможного в период ремонта, вывода из строя расположенных внутри корпуса реактора элементов, обеспечивающих автоматическую остановку реактора, управляющие элементы двухпозиционных переключателей выполнены с возможностью перемещения управляющих элементов общим приводом после сцепления связи своего двигателя с выбранным управляющим элементом только в сторону, соответствующую побуждению движения рабочих органов в сторону уменьшения реактивности. Путем такого поочередного перемещения управляющих элементов можно периодически в процессе нормальной эксплуатации (в том числе и после окончания ремонта) поочередно проверять способность двухпозиционных переключателей побудить движение связанных с ними рабочих органов в сторону уменьшения реактивности при достижении критических значений параметрами, определяющими пределы безопасной эксплуатации реактора.
Таким образом достигается технический результат: повышение надежности работы ядерного реактора в безопасном режиме его эксплуатации путем предотвращения возможности перевода работы ядерного реактора в режим с нарушением пределов безопасной эксплуатации при 16-часовой продолжительности диверсионного управления ядерным реактором.
Рабочие органы могут быть выполнены в виде влияющих на реактивность стержней с возможностью продольного перемещения из одного крайнего положения в другое без остановки в промежуточных положениях и без контроля промежуточных положений рабочих органов при малом влиянии каждого отдельного рабочего органа на реактивность. Малое влияние каждого отдельного рабочего органа на реактивность означает, что одновременное перемещение на полный ход рабочих органов всеми общими приводами, имеющимися в одном ядерном реакторе, не приведет к превышению допустимого техническими регламентами шага увеличения реактивности за минимально возможное для общих приводов время перемещения рабочих органов на полный ход. При этом за счет большого количества стержней малой эффективности любой из них длительно находится в одном из крайних положений. В аналогах это сделать затруднительно, поскольку каждый рабочий орган имеет свой достаточно сложный привод, и требуемое количество приводов не размещается в реальных конструкциях. В настоящем изобретении это осуществимо, поскольку количество общих приводов невелико, а простые функции индивидуального привода позволяют использовать в качестве его двигателя, например, электромагнит малых габаритов и за счет этого разместить все приводы в реальной конструкции. Так достигается дополнительный технический результат - исключение длительных продольных возмущений нейтронного поля, вносимых в промежуточных положениях рабочими органами в виде продольно перемещаемых стержней. Стабильность формы нейтронного поля в процессе эксплуатации повышает безопасность и экономичность ядерного реактора.
Безотказность перемещения рабочего органа, являющаяся одной из составляющих надежности ядерного реактора, повышается с уменьшением количества механических элементов, связанных с рабочим органом во время перемещения. С этой целью рабочие органы могут быть расположены относительно указанных неподвижных элементов реактора с возможностью перемещения рабочих органов силой тяжести либо архимедовой силой только в сторону уменьшения реактивности после расцепления с указанными неподвижными элементами реактора при отсутствии сцепления рабочих органов со связью двигателя общего привода. Также с этой целью элемент сцепления связи двигателя общего привода с рабочим органом может быть выполнен в виде теплоносителя реактора с возможностью приведения этого теплоносителя в управляющее движение общим приводом для перемещения рабочего органа в сторону увеличения реактивности до сцепления с неподвижным элементом реактора.
Технические регламенты определяют пределы безопасной эксплуатации ядерного реактора по количеству и величине дефектов ТВЭЛ. На целостность ТВЭЛ влияют температура ТВЭЛ, коррозионная активность теплоносителя ядерного реактора и механические нагрузки. Поскольку проектные механические нагрузки не повреждают ТВЭЛ, а расположение ТВЭЛ внутри корпуса реактора делает практически невозможным диверсионное увеличение механических нагрузок на ТВЭЛ, то реальными путями диверсионного разрушения ТВЭЛ остаются повышение температуры ТВЭЛ и повышение коррозионной активности теплоносителя реактора. Для исключения возможности диверсионного разрушения ТВЭЛ управляющий элемент двухпозиционного переключателя выполнен с возможностью перевода двухпозиционного переключателя из одного фиксированного состояния в другое (срабатывания) при достижении критического значения следующими параметрами: температурным удлинением ТВЭЛ и/или плотностью теплоносителя реактора и/или коррозионной активностью теплоносителя реактора. Температурное удлинение ТВЭЛ характеризует температуру ТВЭЛ, а плотность теплоносителя реактора характеризует интенсивность теплоотвода от ТВЭЛ, то есть зависимость температуры ТВЭЛ от мощности тепловыделения в нем. Такое исполнение двухпозиционного переключателя обеспечивает его высокое быстродействие и чувствительность при достижении критического значения температурой ТВЭЛ, позволяет начать снижение реактивности при потере теплоносителя, то есть предупредить перегрев ТВЭЛ, а также позволяет достичь нового технического результата: повышение безопасности ядерного реактора при увеличении коррозионной активности теплоносителя реактора.
Поскольку в ТВЭЛ выделяется тепло, передаваемое затем в теплоноситель, то температура ТВЭЛ выше температуры теплоносителя, причем разница температур тем более, чем выше скорость разогрева ТВЭЛ. Поэтому управляющий элемент двухпозиционного переключателя для срабатывания при достижении критического температурного удлинения ТВЭЛ может быть выполнен с возможностью изменения своего положения в зависимости от разницы между длиной ТВЭЛ и длиной элемента реактора, имеющего температуру теплоносителя реактора и выполненного либо из материала оболочки ТВЭЛ, либо из материала с меньшим, чем у оболочки ТВЭЛ, коэффициентом температурного удлинения. В этом случае разница температурного удлинения ТВЭЛ и элемента ядерного реактора, имеющего температуру теплоносителя, характеризует как температуру, так и скорость разогрева ТВЭЛ. Если указанная разница превысит установленную величину, срабатывание соответствующих двухпозиционных переключателей приведет к перемещению рабочих органов в сторону уменьшения реактивности.
Управляющий элемент двухпозиционного переключателя для срабатывания при достижении критической плотности теплоносителя реактора может быть связан с поплавком, расположенным в камере, заполненной теплоносителем реактора с температурой и давлением, соответствующими выходу теплоносителя из активной зоны реактора. Если плотность теплоносителя реактора упадет ниже установленной величины, поплавок в камере опустится, и срабатывание соответствующих двухпозиционных переключателей приведет к перемещению рабочих органов в сторону уменьшения реактивности.
Управляющий элемент двухпозиционного переключателя для срабатывания при достижении критической коррозионной активности теплоносителя реактора может быть связан с расположенным в теплоносителе реактора выполненным из материала оболочки ТВЭЛ элементом с возможностью разрушения последнего под заданной нагрузкой из-за коррозионного износа. Если коррозионная активность теплоносителя превысит установленную величину в течение установленного времени, разрушение выполненных из материала оболочки ТВЭЛ элементов переместит управляющие элементы, и срабатывание соответствующих двухпозиционных переключателей приведет к перемещению рабочих органов в сторону уменьшения реактивности.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖА
На чертеже представлена схематически система управления корпусным ядерным реактором. Цифрами обозначены:
1 - общий привод (ограничен цепью точек);
2 - индивидуальный привод (ограничен цепью точек);
3 - двигатель общего привода;
4 - двигатель индивидуального привода;
5 - связь между двигателем общего привода и РО;
6 - связь между двигателем индивидуального привода и РО;
7 - рабочий орган;
8 - корпус реактора;
9 - неподвижный элемент;
10 - двухпозиционный переключатель;
11 - элемент разрыва связи индивидуального привода;
12 - разъем корпуса реактора;
13 - элемент разрыва связи общего привода;
14 - пульт управления.
Пунктиром показано положение рабочего органа после перемещения. Цепью жирных точек показано положение части связи 5 после перемещения рабочего органа 7.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Система управления корпусным ядерным реактором содержит комплект технических средств для ограничения скорости увеличения реактивности рабочими органами и для автоматической остановки ядерного реактора, включающий приводы 1, 2 с двигателями 3, 4, связи 5, 6, передающие движение от двигателей 3, 4 приводов 1, 2 к рабочим органам 7, причем последние расположены внутри корпуса 8 реактора, а двигатели 3 и 4 расположены снаружи верхней части корпуса 8 реактора.
Внутри корпуса 8 реактора установлены неподвижные элементы 9 для сцепления и расцепления с рабочими органами 7, например с помощью защелки, с возможностью перемещения рабочих органов 7 результирующей постоянно действующих на рабочие органы сил, например сил тяжести рабочих органов 7, после расцепления только в сторону уменьшения реактивности. Каждый рабочий орган 7 снабжен по крайней мере двумя приводами 1 и 2, один из которых 1 общий для всех рабочих органов 7 либо общий для группы рабочих органов 7 и перемещающий рабочие органы 7 в сторону увеличения реактивности до сцепления с неподвижными элементами 9 только поочередно по одному после сцепления связи 5 своего двигателя 3 с выбранным рабочим органом 7, а другой 2 - индивидуальный для каждого рабочего органа 7 и расцепляющий рабочий орган 7 с указанным неподвижным элементом 9 в любом порядке по отношению к другим рабочим органам 7 путем расцепления связи 6 своего двигателя 4 с элементом сцепления рабочего органа 7 с указанным неподвижным элементом 9. Конструкция механических элементов связи 5 аналогична конструкции механических элементов известных манипуляторов "горячих" камер атомных станций.
Комплект технических средств снабжен расположенными внутри корпуса 8 реактора двухпозиционными переключателями 10 с двумя фиксированными состояниями в зависимости от положения управляющего элемента переключателя 10 относительно критического положения, соответствующего достижению критического значения одним из параметров, определяющих пределы безопасной эксплуатации реактора. Конструкция двухпозиционных переключателей 10 аналогична механизмам известных пружинных двухпозиционных выключателей освещения. Перемещение управляющих элементов двухпозиционных переключателей 10 производится устройствами, аналогичными механической части известных датчиков параметров, например, манометров, расходомеров, уровнемеров.
Связи 6 двигателей 4 индивидуальных приводов 2 с элементами сцепления снабжены расположенными внутри корпуса 8 реактора управляемыми элементами разрыва 11, например в виде муфты, с возможностью разрыва связей 6 для движения рабочих органов 7 в сторону уменьшения реактивности при положении двухпозиционных переключателей 10, соответствующем достижению критических значений параметрами, определяющими пределы безопасной эксплуатации реактора.
Корпус 8 реактора имеет верхнюю и нижнюю части, состыкованные по разъему 12. Связи 5 двигателей 3 общих приводов 1 с рабочими органами 7 снабжены расположенными внутри корпуса 8 реактора вблизи разъема 12 корпуса 8 элементами разрыва 13, например в виде муфты, с возможностью разрыва связей 5 при размыкании разъема 12 корпуса 8 реактора.
Управляющие элементы двухпозиционных переключателей 10 выполнены с возможностью перемещения управляющих элементов общим приводом 1 после сцепления связи 5 своего двигателя 3 с выбранным управляющим элементом только в сторону перевода двухпозиционных переключателей 10 в состояние остановки, соответствующее побуждению движения рабочих органов 7 в сторону уменьшения реактивности.
Рабочие органы 7 могут быть выполнены в виде стержней, содержащих изотопы с большим сечением поглощения нейтронов, с возможностью продольного перемещения в направляющих каналах из одного крайнего положения в другое без остановки в промежуточных положениях и без контроля промежуточных положений рабочих органов 7 при малом влиянии каждого отдельного рабочего органа 7 на реактивность. Каждый рабочий орган 7 может быть снабжен электромагнитными датчиками крайнего верхнего и крайнего нижнего положения в направляющем канале, аналогичными известным электромагнитным датчикам положения стальных элементов в теплоносителе.
Рабочие органы 7 могут быть расположены относительно указанных неподвижных элементов 9 реактора с возможностью перемещения рабочих органов 7 силой тяжести либо архимедовой силой только в сторону уменьшения реактивности после расцепления с указанными неподвижными элементами 9 реактора при отсутствии сцепления рабочих органов 7 со связью 5 двигателя 3 общего привода 1.
Элемент сцепления связи 5 двигателя 3 общего привода 1 с рабочим органом 7 может быть выполнен в виде теплоносителя реактора с возможностью приведения этого теплоносителя в управляющее движение общим приводом 1 для перемещения рабочего органа 7 в сторону увеличения реактивности до сцепления с неподвижным элементом 9 реактора.
Двухпозиционные переключатели 10 с управляющими элементами выполнены с возможностью побуждения перемещения рабочих органов 7 в сторону уменьшения реактивности при достижении критических значений следующими параметрами:
температурным удлинением ТВЭЛ реактора и/или плотностью теплоносителя реактора и/или коррозионной активностью теплоносителя реактора.
Управляющий элемент двухпозиционного переключателя 10 для срабатывания при достижении критического температурного удлинения ТВЭЛ может быть выполнен с возможностью изменения своего положения в зависимости от разницы между длиной ТВЭЛ и длиной элемента реактора, имеющего температуру теплоносителя реактора и выполненного либо из материала оболочки ТВЭЛ, либо из материала с меньшим, чем у оболочки ТВЭЛ, коэффициентом температурного удлинения.
Управляющий элемент двухпозиционного переключателя 10 для срабатывания при достижении критической плотности теплоносителя реактора может быть связан с поплавком, расположенным в камере, заполненной теплоносителем реактора с температурой и давлением, соответствующими выходу теплоносителя из активной зоны реактора.
Управляющий элемент двухпозиционного переключателя 10 для срабатывания при достижении критической коррозионной активности теплоносителя реактора может быть связан с расположенным в теплоносителе реактора выполненным из материала оболочки ТВЭЛ элементом с возможностью разрушения последнего под заданной нагрузкой из-за коррозионного износа.
Двигатели 3 и 4 связаны электрическими связями с пультом управления 14 системы управления.
Для увеличения реактивности по сигналу от пульта управления 14 двигатель 3 общего привода 1 приводит в движение связь 5, которая сцепляется с одним из находящихся в нижнем положении рабочих органов 7 и перемещает этот рабочий орган 7 вверх по направляющему каналу до точки сцепления рабочего органа 7 с неподвижным элементом 9. По сигналу от пульта управления 14 двигатель 4 индивидуального привода 2 через связь 6 приводит в движение защелку, которая сцепляет рабочий орган 7 с неподвижным элементом 9. После этого связь 5 расцепляется с поднятым рабочим органом 7 и может сцепиться со следующим находящимся в нижнем положении рабочим органом 7.
Для уменьшения реактивности по сигналу от пульта управления 14 двигатель 4 индивидуального привода 2 через связь 6 приводит в движение защелку, которая расцепляет рабочий орган 7 с неподвижным элементом 9, после чего рабочий орган 7 под действием силы тяжести движется вниз до упора.
При диверсионном управлении сигналы управления от пульта управления 14 к двигателям 3 и 4 приводов могут быть направлены на нарушение пределов безопасной эксплуатации, в том числе на перемещение всех рабочих органов 7 в сторону увеличения реактивности с запретом обратного перемещения рабочих органов 7. В этом случае при достижении критических значений параметрами, определяющими безопасность ядерного реактора, происходит следующее:
- в двухпозиционных переключателях 10 с управляющим элементом, изменяющим свое положение в зависимости от разницы между длиной ТВЭЛ и длиной контрольного элемента ядерного реактора, критическое температурное удлинение ТВЭЛ перемещает этот элемент настолько, что переводит двухпозиционный переключатель 10 в состояние остановки;
- в двухпозиционных переключателях 10 с управляющим элементом, изменяющим свое положение в зависимости от положения поплавка в камере, заполненной теплоносителем, из-за критического уменьшения плотности теплоносителя поплавок опускается и переводит двухпозиционный переключатель 10 в состояние остановки;
- в двухпозиционных переключателях 10 с элементом, разрушающимся из-за критического коррозионного износа, управляющий элемент после разрушения этого элемента переводит двухпозиционный переключатель 10 в состояние остановки.
Перевод двухпозиционных переключателей 10 в состояние остановки вызывает расцепление муфтовых соединений 11. В результате рабочие органы 7 расцепляются с неподвижными элементами 9 и движутся под действием силы тяжести вниз до упора, то есть в сторону уменьшения реактивности. При одновременном перемещении вниз всех не сцепленных с общим приводом 1 рабочих органов 7 скорость уменьшения реактивности намного превысит скорость увеличения реактивности общим приводом 1, который может перемещать рабочие органы 7 вверх только поочередно, причем в верхнем положении рабочие органы 7 не сцепятся с неподвижными элементами 9, а после расцепления со связью 5 также переместятся вниз до упора. Вследствие общего уменьшения реактивности происходит автоматическая остановка ядерного реактора без нарушения пределов безопасной эксплуатации при нарушениях нормальной эксплуатации в случае диверсионного управления ядерным реактором с работоспособными элементами указанного комплекта технических средств, расположенными внутри корпуса реактора.
Возврат двухпозиционных переключателей 10 в нормальное состояние происходит:
- в управляющих элементах двухпозиционных переключателей 10 с элементом, изменяющим свое положение в зависимости от разницы между длиной ТВЭЛ и длиной контрольного элемента после охлаждения ТВЭЛ до установленной температуры;
- в управляющих элементах двухпозиционных переключателей 10 с элементом, изменяющим свое положение в зависимости от положения поплавка в камере, заполненной теплоносителем - после всплытия поплавка в результате повышения плотности теплоносителя до установленной величины;
- в управляющих элементах двухпозиционных переключателей 10 с элементом, разрушившимся из-за критического коррозионного износа - после замены разрушившегося элемента.
Для проверки работоспособности элементов указанного комплекта технических средств, расположенных внутри корпуса реактора, общий привод 1 поочередно сцепляет связь 5 с управляющими элементами двухпозиционных переключателей 10. При перемещении связью 5 управляющего элемента в сторону перевода двухпозиционного переключателя 10 в состояние остановки те рабочие органы 7, индивидуальные приводы 2 которых связаны с этим двухпозиционным переключателем 10, должны переместиться вниз до упора, что контролируется датчиками положения рабочих органов 7. При достаточном количестве двухпозиционных переключателей 10 снижение мощности ядерного реактора, вызванное перемещением рабочих органов 7 в результате опробования одного двухпозиционного переключателя 10, не нарушит нормальную эксплуатацию реактора.
Настоящее изобретение может быть использовано в атомной энергетике для повышения безопасности эксплуатации ядерных энергетических установок.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЗАЩИТЫ ЯДЕРНОГО РЕАКТОРА | 2021 |
|
RU2762377C1 |
| ЯДЕРНЫЙ РЕАКТОР | 2015 |
|
RU2594889C1 |
| ВОДООХЛАЖДАЕМЫЙ ЯДЕРНЫЙ РЕАКТОР | 1992 |
|
RU2032946C1 |
| ЯДЕРНЫЙ РЕАКТОР И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 2006 |
|
RU2317597C1 |
| ВЫСОКОТЕМПЕРАТУРНЫЙ ЯДЕРНЫЙ РЕАКТОР | 1983 |
|
RU1127446C |
| Ядерный реактор для космического аппарата | 2020 |
|
RU2743117C1 |
| ТЕПЛОВЫДЕЛЯЮЩИЙ ЭЛЕМЕНТ ЯДЕРНОГО ЭНЕРГЕТИЧЕСКОГО РЕАКТОРА НА БЫСТРЫХ НЕЙТРОНАХ | 2018 |
|
RU2680252C1 |
| ЯДЕРНАЯ УСТАНОВКА И СПОСОБ ЕЕ ЭКСПЛУАТАЦИИ | 2013 |
|
RU2549182C1 |
| СПОСОБ ОТЖИГА АКТИВНОЙ ЗОНЫ ЯДЕРНОГО РЕАКТОРА И ЯДЕРНЫЙ РЕАКТОР | 2014 |
|
RU2596163C2 |
| Ядерный реактор с тяжелым жидкометаллическим теплоносителем | 2021 |
|
RU2756230C1 |
Изобретение относится к системам управления ядерными реакторами (ЯР). Система управления корпусным ЯР содержит комплект технических средств для ограничения скорости увеличения реактивности рабочими органами (РО) и для автоматической остановки ЯР, включающий приводы с двигателями и связями, передающими движение от двигателей приводов к РО, причем последние расположены внутри корпуса ЯР, при этом внутри корпуса ЯР установлены неподвижные элементы для сцепления и расцепления с РО с возможностью перемещения РО результирующей постоянно действующих на РО сил после расцепления только в сторону уменьшения реактивности, каждый РО снабжен, по крайней мере, двумя приводами, один из которых общий для всех РО либо общий для группы РО и перемещающий РО в сторону увеличения реактивности до сцепления с неподвижными элементами только поочередно по одному после сцепления связи своего двигателя с выбранным РО, а другой - индивидуальный для каждого РО и расцепляющий РО с указанным неподвижным элементом в любом порядке по отношению к другим РО путем расцепления связи своего двигателя с элементом сцепления РО с указанным неподвижным элементом, комплект технических средств снабжен расположенными внутри корпуса ЯР двухпозиционными переключателями с двумя фиксированными состояниями в зависимости от положения управляющего элемента переключателя относительно критического положения, соответствующего достижению критического значения одним из параметров, определяющих пределы безопасной эксплуатации ЯР, связи двигателей индивидуальных приводов с элементами сцепления снабжены расположенными внутри корпуса ЯР управляемыми элементами разрыва, например в виде муфты, с возможностью разрыва связей для движения РО в сторону уменьшения реактивности при состоянии двухпозиционных переключателей, соответствующем достижению критических значений параметрами, определяющими пределы безопасной эксплуатации ЯР, связи двигателей общих приводов с РО снабжены расположенными внутри корпуса ЯР вблизи разъема корпуса ЯР элементами разрыва, например в виде муфты, с возможностью разрыва связей при размыкании разъема корпуса ЯР, управляющие элементы двухпозиционных переключателей выполнены с возможностью перемещения управляющих элементов общим приводом после сцепления связи своего двигателя с выбранным управляющим элементом только в сторону, соответствующую побуждению движения РО в сторону уменьшения реактивности. В результате предотвращается возможность перевода работы ЯР в режим с нарушением пределов безопасной эксплуатации в случае ограниченного во времени 16 часами диверсионного управления ЯР, при этом возможно исключение длительных продольных возмущений нейтронного поля, вносимых в промежуточных положениях рабочими органами в виде продольно перемещаемых стержней. Двухпозиционный переключатель пассивной защиты ЯР имеет два фиксированных состояния в зависимости от положения управляющего элемента переключателя относительно критического положения, соответствующего достижению критического значения одним из параметров, определяющих пределы безопасной эксплуатации ЯР, при этом управляющий элемент выполнен с возможностью перехода двухпозиционного переключателя из одного фиксированного состояния в другое (срабатывания) при достижении критического значения следующими параметрами: температурным удлинением тепловыделяющих элементов (ТВЭЛ) ЯР и/или плотностью теплоносителя ЯР и/или коррозионной активностью теплоносителя ЯР. В результате повышается быстродействие и чувствительность двухпозиционного переключателя при достижении критического значения температурой ТВЭЛ, предупреждается перегрев ТВЭЛ при потере теплоносителя ЯР, а также повышается безопасность ЯР при увеличении коррозионной активности теплоносителя ЯР. 2 н. и 6 з.п. ф-лы, 1 ил.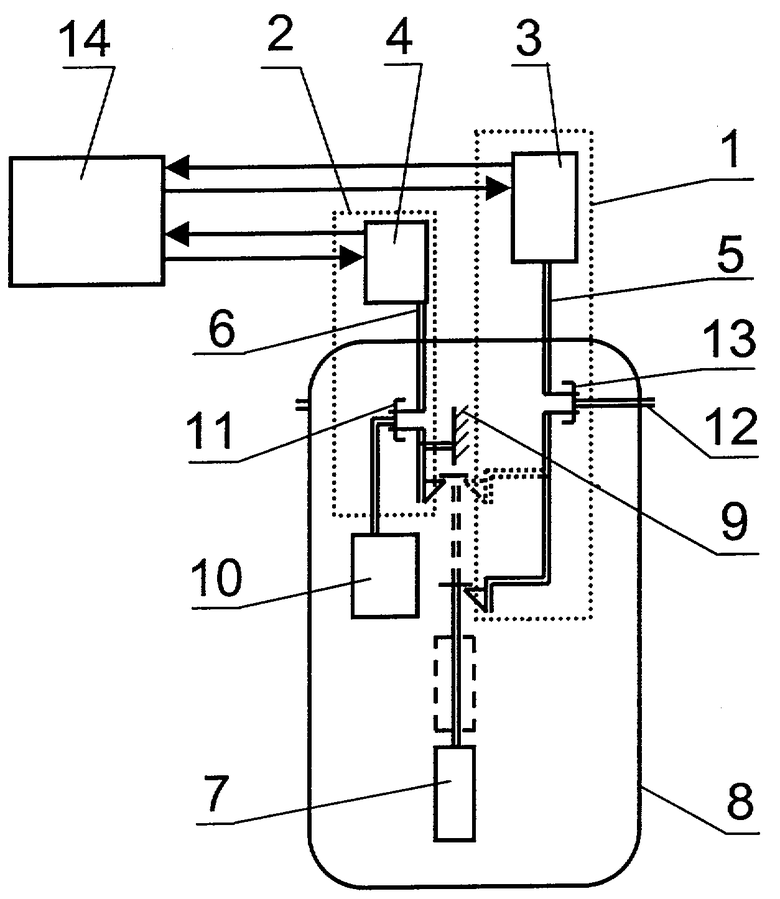
| US 5818892 А, 06.10.1998 | |||
| УСТРОЙСТВО АВАРИЙНОЙ ЗАЩИТЫ ЯДЕРНОГО РЕАКТОРА | 1993 |
|
RU2086010C1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН СИСТЕМЫ УПРАВЛЕНИЯ И ЗАЩИТЫ ЯДЕРНОГО РЕАКТОРА | 2000 |
|
RU2190264C2 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН СИСТЕМЫ УПРАВЛЕНИЯ И ЗАЩИТЫ ЯДЕРНОГО РЕАКТОРА | 2002 |
|
RU2231143C2 |
| US 4717528 A, 05.01.1988 | |||
| US 4173511 А, 06.11.1979. | |||

