Изобретение относится к исполнительным органам систем управления и защиты (СУЗ) ядерных реакторов. Предполагаемая область применения - средства быстродействующей аварийной защиты (БАЗ) реакторов типа РБМК.
Логика работы исполнительных органов СУЗ группы БАЗ такова: в отсутствие аварийных отклонений контролируемых параметров управляемые поглотители нейтронов находятся вне активной зоны; при появлении аварийного сигнала поглотители названных исполнительных органов с максимально возможной скоростью вводятся в активную зону (одновременно с меньшей скоростью в активную зону вводятся поглотители и других исполнительных органов СУЗ); практически сразу же после останова реактора поглотители исполнительных органов группы БАЗ из активной зоны удаляются (реактор остается в подкритическом состоянии).
Известен исполнительный орган СУЗ [1], содержащий в вертикально устанавливаемом сухом пенале многозвенный стержень-поглотитель нейтронов, перемещаемый по высоте при помощи гибкой тяги сервоприводом. Охлаждение пенала в канале СУЗ реактора осуществляется водой, протекающей через тонкий кольцевой зазор между внутренней поверхностью канала и внешней пенала. Охлаждение стержня осуществляется главным образом за счет теплового излучения к внутренней поверхности стенок пенала, частично за счет конвекции газовой среды (воздуха) в пенале и теплообмена через точки касания "стержень-пенал".
Достоинством такого исполнительного органа является обеспечение минимума количества охлаждающей воды в пределах активной зоны реактора, точнее минимума нежелательного ввода положительной реактивности при возможном обезвоживании контура охлаждения каналов СУЗ. Кроме того, в воздушной среде пенала возможно достижение высокой скорости ввода в активную зону стержня-поглотителя, что особенно важно для исполнительных органов СУЗ группы БАЗ.
Недостатком описанного исполнительного органа является одноцелевой характер применения: только для управления реактивностью (мощностью) реактора.
Исполнительный орган СУЗ [2], принимаемый за прототип к изобретению, содержит вертикально устанавливаемый сухой пенал с центральной и периферийными гильзами, стержневые поглотители нейтронов в периферийных гильзах и средства для удержания поглотителей в положении выше активной зоны, ввода в нее и вывода в исходное положение. Названные средства выполнены в виде перемещаемой сервоприводом подвески, объединяющей стержни-поглотители в пучок (кластер). Центральная гильза пенала используется для размещения элементов подвески и так называемого вытеснителя-замедлителя, несколько повышающего эффективность поглотителей. Связь подвески со стержнями-поглотителями осуществляется через вертикальные прорези между центральной и периферийными гильзами. Охлаждение элементов исполнительного органа осуществляется аналогично выше описанному.
Отметим, что центральная гильза пенала исполнительного органа по источнику [2] содержит еще так называемый вытеснитель-замедлитель, несколько повышающий эффективность поглотителей. Однако в других известных вариантах такого исполнительного органа вытеснитель-замедлитель (ввиду относительно малого влияния на эффективность поглотителей при существенном усложнении конструкции в целом) в центральную гильзу не устанавливается (см., например, [2], рис.17а) и в дальнейшем изложении принимается отсутствующим.
Достоинством исполнительного органа-прототипа (в дополнение к достоинствам аналога по [1]) является существенно меньший вес подвижных частей (как следствие - существенно меньшая нагрузка на сервопривод) и улучшенные условия охлаждения поглотителей.
Недостатком исполнительного органа-прототипа является необходимость изготовления поглотителей нейтронов из сравнительно более дефицитных материалов (чтобы обеспечить поглощающую способность кластера стержней малого диаметра не ниже таковой одного стержня большого диаметра). Но в данном случае важнее то, что исполнительный орган-прототип, как и аналог по [1], может использоваться тоже только для управления реактивностью (мощностью) реактора.
Задачей изобретения является расширение функциональных возможностей исполнительного органа-прототипа.
Технический результат, достигаемый при использовании изобретения, заключается в совмещении в единой конструкции двух функций: управления реактивностью и контроля за энерговыделением в активной зоне преимущественно подкритического реактора. (Акцент на обеспечение возможности контроля именно подкритического реактора объясняется тем, что потребность в средствах для такого контроля, как гораздо более сложного для реализации, чем контроль за энерговыделением в активной зоне реактора при работе на мощности, обычно более актуальна).
Заявленный технический результат достигается тем, что исполнительный орган-прототип дополнен датчиком ионизирующих излучений с возможностью дистанционно-управляемого ввода в активную зону - вывода из нее.
Функция управления в предложенном устройстве реализуется путем ввода поглотителей в активную зону по сигналу аварийной защиты реактора при работе его как в энергетическом режиме, так и после останова, а функция контроля - путем ввода в активную зону и измерения сигнала датчика ионизирующих излучений после останова реактора и "взвода" поглотителей в верхнее положение (реактор при этом остается в подкритическом состоянии). Вывод датчика за пределы активной зоны, необходимый для предотвращения выгорания его токообразующих электродов с повышенной чувствительностью к нейтронам, осуществляется после достижения реактором критсостояния при новом (очередном) подъеме мощности.
В одном из ниже описанных вариантов предложенного устройства заявленный технический результат достигается тем, что средства для удержания поглотителей в верхнем положении выполнены в виде сборки дистанционно-управляемых защелок подвесок поглотителей, а средства для подъема поглотителей из нижнего положения в верхнее образованы перемещаемым в центральной гильзе датчиком, нижний хвостовик которого выполнен с возможностью сцепления через цангу связи с размещенными в периферийных гильзах поршнями-толкателями поглотителей в их нижнем положении и расцепления - в верхнем, причем элементы взаимосвязи поршней с цангой размещены в вертикальных прорезях между периферийными и центральной гильзами.
В другом ниже описанном варианте предложенного устройства заявленный технический результат достигается тем, что средства для удержания поглотителей в верхнем положении выполнены в виде управляемого электромагнита с полюсами для удержания автономных магнитопроводящих поршней-толкателей, размещенных в периферийных гильзах и являющихся опорами поглотителей, а средства для подъема поглотителей из нижнего положения в верхнее выполнены в виде пневмопривода, образованного теми же поршнями-толкателями и периферийными гильзами, нижняя часть каждой из которых через центральную гильзу соединена с газовой магистралью управляемого давления, а верхняя - с магистралью низкого (атмосферного) давления.
Как видим, в основе этих конструкций лежит идея реализации максимально возможного сдвига элементов, обеспечивающих перемещение поглотителей, к периферии пенала с тем, чтобы центральную гильзу пенала освободить для размещения подвижного датчика.
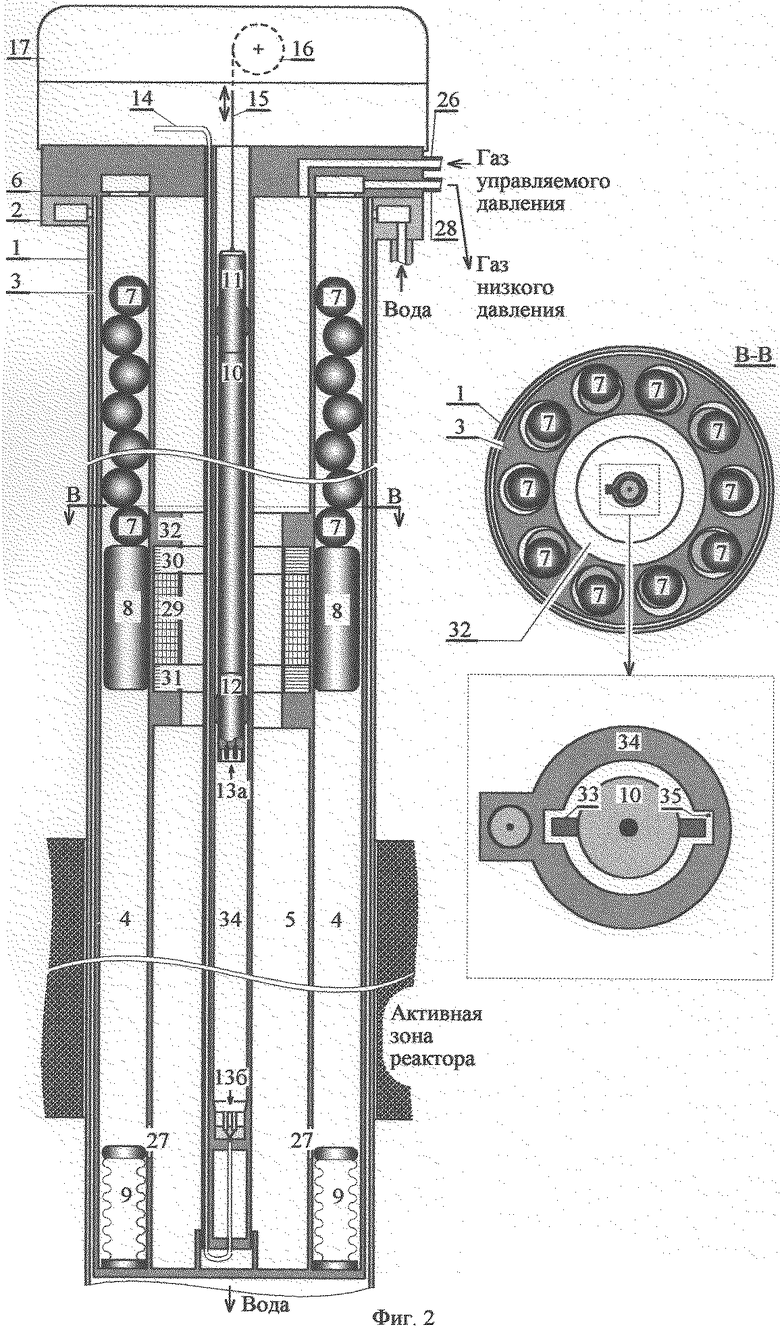
Изобретение поясняется по представленным на фиг.1, 2 эскизам исполнительного органа СУЗ группы БАЗ реактора типа РБМК в вариантах соответственно со стержневыми и шариковыми поглотителями нейтронов и неподвижными кабелями связи датчиков с вторичной аппаратурой (возможность реализации датчиков с подвижными кабелями связи в виде спиральных пружин после изложенного ниже станет очевидной).
Общими для фиг.1, 2 элементами являются: 1 - канал СУЗ с фланцем 2 для подвода охлаждающей воды и крепления к металлоконструкциям реактора (не показан); 3 - сухой пенал исполнительного органа с периферийными гильзами 4, центральной гильзой 5 и фланцем 6 для соединения с фланцем 2 канала 1; 7 - поглотители нейтронов; 8 - поршни-толкатели поглотителей; 9 - опорные демпферы для смягчения ударной нагрузки на элементы конструкции при сбросе поглотителей из верхнего положения в нижнее; 10 - датчик ионизирующих излучений; 11, 12 - верхний и нижний хвостовики датчика; 13а, 13б - элементы разъема для подключения (после ввода в активную зону) датчика к кабелю 14 связи с вторичной измерительной аппаратурой (не показана); 15 - гибкие подвески датчика к барабану 16 сервопривода 17; активная зона реактора выделена штриховкой.
Дополнительно на фиг. 1 обозначено: 18 - электромагнитные защелки, удерживающие стержни-поглотители 7 за головки 19 подвесок 20 с шарнирами 21 в верхнем положении; 22 - цанга для сцепления поршней-толкателей 8 с головкой нижнего хвостовика 12 датчика 10 (элементы взаимосвязи поршней-толкателей с цангой проходят через вертикальные прорези 23 между периферийными и центральной гильзами пенала 3); 24 - перемычка центральной гильзы 5, в которую встроена часть 13б разъема датчика 10 для подключения к кабелю 14 (часть 13а разъема встроена в хвостовик 11 датчика); 25 - выступы хвостовика 11 для азимутальной ориентации датчика в обеспечение взаимосовпадения частей разъема 13а, 13б.
Дополнительно на фиг.2 обозначено: 26 - патрубок связи центральной гильзы пенала 3 с газовой магистралью управляемого давления (предполагается использование слабоактивируемого нейтронами газа, например атмосферного воздуха); 27 - отверстия между нижними участками периферийных и центральной гильз для подачи под поршни-толкатели 8 газа высокого давления; 28 - патрубок связи верхних торцов периферийных гильз с газовой магистралью низкого давления; 29 - обмотка электромагнита с парой полюсов 30, 31 для удержания магнитопроводящих поршней-толкателей 8 в верхнем положении, соответствующем верхнему положению поглотителей (кабель питания обмотки 29 не показан); 32 - корпус электромагнита; 33 - радиальные выступы в хвостовиках 11, 12 датчика для азимутальной ориентации его в направляющей трубке 34 с продольными пазами 35 в обеспечение взаимосовпадения частей 13а, 13б разъема для подключения к кабелю 14 (части 13а, 13б встроены соответственно в хвостовик 12 и в нижнюю часть трубки 34).
Предполагается, что исполнительный орган СУЗ по фиг.1, 2 содержит также элементы (не показаны), обеспечивающие возможность индикации положения поглотителей, поршней-толкателей и подвижных датчиков.
В исходном состоянии исполнительного органа по фиг.1 (реактор - на мощности) поглотители нейтронов 7 и датчик 10 находятся выше активной зоны, а поршни-толкатели 8, опирающиеся на демпферы 9, - ниже ее.
С появлением сигнала на аварийный останов реактора электромагнитные защелки 18 обесточиваются и перестают удерживать головки 19 подвесок 20 стержневых поглотителей; происходит "сброс" этих поглотителей под действием собственного веса в активную зону до нижнего положения с последующей опорой на поршни-толкатели 8 и демпферы 9. Поскольку одновременно с этим (в соответствии с логикой работы СУЗ) в активную зону вводятся и все остальные поглотители СУЗ, реактор переходит в подкритическое состояние (останавливается).
В соответствии с описанной ранее логикой работы средств БАЗ поглотители рассматриваемого исполнительного органа после останова реактора вновь из активной зоны удаляются. Происходит это следующим образом. По командному сигналу оператора барабан 16 сервопривода 17 приводится во вращение на удлинение подвески 15 и датчик 10 опускается до нижнего положения, при котором головка хвостовика 11 ложится на перемычку 24 центральной гильзы, части 13а, 13б разъема для подключения датчика к кабелю 14 связи с вторичной аппаратурой взаимно соединяются, а головка хвостовика 12, пройдя через цангу 22, оказывается несколько ниже ее. Пружинящие лепестки цанги 22 выполнены так, что усилие, необходимое для прохождения через них головки хвостовика 12 при движении вниз, меньше веса датчика 10 с хвостовиками 11, 12, а при движении вверх - больше веса всех поглотителей 7 и их подвесок 20. Поэтому после формирования командного сигнала оператора на вращение барабана 16 в обратном направлении начинается подъем не только датчика 10 с элементами 11, 12, 13а, но и цанги 22, поршней-толкателей 8, поглотителей 7 и подвесок 20. Движение названных элементов вверх продолжается до уровня, при котором головки 19 подвесок 20 входят в зацепление с электромагнитными защелками 18, а цанга 22 входит в контакт с перемычкой 24. Тяговые усилия со стороны барабана 16 (сервопривода 17) к дальнейшему продвижению датчика 10 вверх приводят к ступенчатому увеличению давления перемычки 24 на цангу 22, проскальзыванию головки хвостовика 12 через лепестки этой цанги и сбросу последней в нижнее положение.
После возврата поглотителей в верхнее положение формируется вновь командный сигнал на перемещение датчика 10 вниз, в результате чего хвостовик 11 этого датчика вновь ложится на перемычку 24, части 13а, 13б разъема для подключения к кабелю 14 взаимно соединяются, а головка хвостовика 12 оказывается ниже цанги 22. Указанное состояние элементов, при котором сигналы датчика 10 остаются пропорциональными интегральному по высоте энерговыделению в активной зоне, сохраняется до вывода реактора на мощность, как правило, не выше 1% от номинальной.
Процедура извлечения датчика 10 из активной зоны для предотвращения интенсивного выгорания токообразующих электродов повышенной чувствительности к нейтронам аналогична описанной выше с тем лишь отличием, что поршни-толкатели 8 с цангой 22 перемещаются вверх до контакта последней с перемычкой 24 без поглотителей 7 и подвесок 20. Тяговые усилия со стороны барабана 16 (сервопривода 17) к дальнейшему продвижению датчика 10 вверх вновь приводят к ступенчатому увеличению давления перемычки 24 на цангу 22, проскальзыванию головки хвостовика 12 через лепестки этой цанги и сбросу последней в нижнее положение. Устройство вновь оказывается в исходном положении.
Характерной особенностью исполнительного органа в варианте по фиг.2 является полная независимость средств управления датчиком от средств управления поглотителями. Управление датчиком 10 сводится к перемещению его в нижнее положение до взаимного сочленения элементов 13а, 13б разъема для подключения к кабелю 14 после останова реактора и к возврату в исходное положение после вывода реактора на мощность не более 1% от номинальной. Управление же поглотителями 7 осуществляется следующим образом.
В исходном состоянии исполнительного органа обмотка 29 электромагнита находится под током (напряжением) и поршни-толкатели 8, подпирающие снизу столбы поглотителей 7, удерживаются между парой магнитных полюсов 30, 31 в верхнем положении (выше активной зоны), давление газа, подаваемого к патрубкам 26, 28, одинаково низкое.
С появлением сигнала на аварийный останов реактора обмотка 29 электромагнита обесточивается и поршни-толкатели 8 вместе с поглотителями 7 под действием собственного веса сбрасываются в активную зону до нижнего положения с последующей опорой на демпферы 9. Одновременно с этим в активную зону вводятся и все остальные поглотители СУЗ, реактор переходит в подкритическое состояние.
После останова реактора по командному сигналу оператора в патрубок 26 подается газ высокого давления, который, проходя через центральную гильзу 5, отверстия 27, гильзы 4 и патрубок 28 к магистрали низкого давления, увлекает поршни-толкатели 8 с поглотителями 7 в исходное (верхнее) положение. После подачи тока (напряжения) к обмотке 29 электромагнита и последующего уменьшения давления газа в патрубке 26 до исходного (низкого) поршни-толкатели 8 удерживаются между парой магнитных полюсов 30, 31, а поглотители 7 - вне активной зоны.
Источники информации
1. Емельянов И.Я. и др. Конструирование ядерных реакторов. - М.: Энергоиздат, 1982, с. 199-200.
2. Ионайтис Р.Р. Нетрадиционные средства управления ядерными реакторами. - М.: Издательство МГТУ им. Н.Э.Баумана, 1992, с. 63-66, рис.17д.
Изобретение относится к исполнительным органам системы управления и защиты ядерного реактора. Исполнительный орган содержит вертикально устанавливаемый сухой пенал с центральной и периферийными гильзами, поглотители нейтронов в периферийных гильзах и средства для удержания поглотителей в положении выше активной зоны, ввода в нее и вывода в исходное положение, усовершенствован тем, что дополнен датчиком ионизирующих излучений с возможностью дистанционно-управляемого ввода в активную зону - вывода из нее. Средства для удержания поглотителей в верхнем положении выполнены в виде сборки дистанционно-управляемых защелок подвесок поглотителей, а средства для подъема поглотителей из нижнего положения в верхнее образованы перемещаемым в центральной гильзе датчиком, нижний хвостовик которого выполнен с возможностью сцепления через цангу связи с размещенными в периферийных гильзах поршнями-толкателями поглотителей в их нижнем положении и расцепления - в верхнем, причем элементы взаимосвязи поршней с цангой размещены в вертикальных прорезях между периферийными и центральной гильзами. Средства для удержания поглотителей в верхнем положении могут быть выполнены в виде управляемого электромагнита с полюсами для удержания автономных магнитопроводящих поршней-толкателей, размещенных в периферийных гильзах и являющихся опорами поглотителей, а средства для подъема поглотителей из нижнего положения в верхнее выполнены в виде пневмопривода, образованного теми же поршнями-толкателями и периферийными гильзами, нижняя часть каждой из которых через центральную гильзу соединена с газовой магистралью управляемого давления, а верхняя - с магистралью низкого (атмосферного) давления. Технический результат: обеспечивается совмещение функций управления реактивностью и контроля за энерговыделением реактора. Функция управления реализуется путем "сброса" поглотителей в активную зону по сигналу аварийной защиты реактора при работе его как в энергетическом режиме, так и после останова. Функция контроля реализуется главным образом после останова реактора (и "взвода" поглотителей в верхнее положение) путем ввода в активную зону и измерения сигнала датчика ионизирующих излучений. 2 з.п.ф-лы, 2 ил.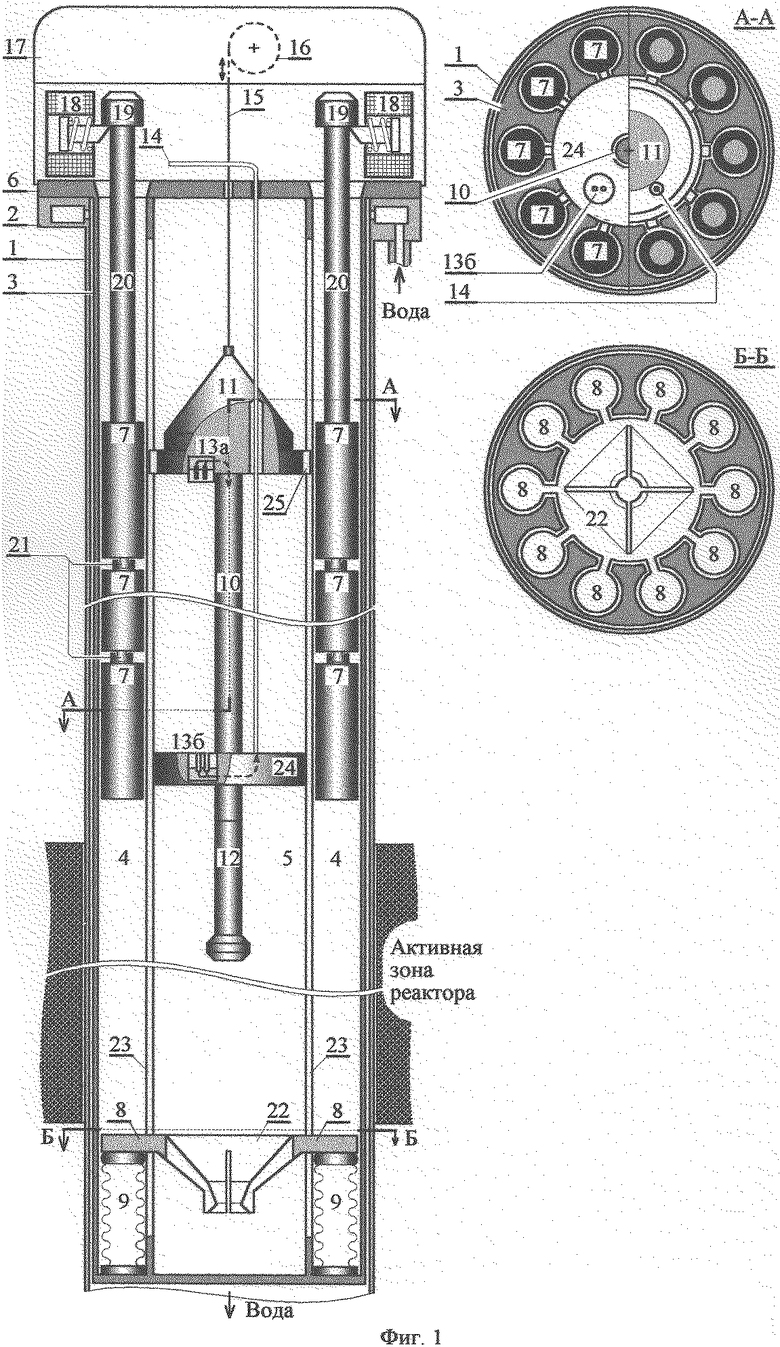
| ИОНАЙТИС Р.Р | |||
| Нетрадиционные средства управления ядерными реакторами | |||
| - М.: МГТУ им | |||
| Н.Э | |||
| Баумана, 1992, с | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Тормозная рычажная передача тележки железнодорожного транспортного средства | 1987 |
|
SU1463599A1 |
| СИСТЕМА УПРАВЛЕНИЯ И ЗАЩИТЫ ЯДЕРНОГО КАНАЛЬНОГО РЕАКТОРА | 1992 |
|
RU2046407C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ УПРАВЛЕНИЯ И ЗАЩИТЫ ЯДЕРНОГО РЕАКТОРА | 1989 |
|
SU1723919A1 |
| SU 1489467 A1, 20.03.1996 | |||
| Устройство для управления ядерным реактором | 1974 |
|
SU602030A1 |
| СИСТЕМА И СПОСОБ ДЛЯ УПРАВЛЕНИЯ УПРАВЛЯЮЩИХ СТЕРЖНЕЙ АТОМНОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 1995 |
|
RU2140104C1 |
| СПОСОБ СУШКИ КАПИЛЛЯРНО-ПОРИСТЫХ МАТЕРИАЛОВ | 2005 |
|
RU2287750C1 |
| СПОСОБ РЕКЛАМИРОВАНИЯ | 2004 |
|
RU2283515C2 |

