Изобретение относится к способу и устройству для укладки трехфазной обмотки переменного тока в пазы растянутой по длине индукционной катушки или в пакеты индукционных катушек электродвигателя с прямолинейным полем, которые выполнены с открытыми вниз пазами на нижней стороне плиты перекрытия пути движения.
В патенте DE 3737719 А1 описано передвижное по плите перекрытия пути движения единицы подвижного состава для прокладки провода и принцип его действия. Рабочий цикл по существу состоит из следующих операций:
- ветви обмотки снимаются с установленного на единице подвижного состава запаса и подаются на установленное на единице подвижного состава гибочное приспособление,
- в гибочном приспособлении каждая ветвь обмотки сгибается в виде меандра и в изогнутом состоянии вводится в зажимы,
- зажимы соединены между собой на ленточном транспортере с постоянным интервалом, соответствующим расстоянию между пазами, и
- находящаяся в зажимах ленточного транспортера обмотка проводится через консоль к нижней стороне плиты перекрытия и прижимается там инструментом в пазы индукционной катушки.
В данном способе посредством применения зажимов размеры промежутков между пазами и геометрия обмотки (меандр) заданы постоянными. Этот способ не позволяет учитывать допуски или отклонения в размерах меандра.
Но допуски и отклонения почти всегда возникают. Имеются как технологические допуски, так и допуски в стыках пакетов индукционных катушек или пути движения. Кроме того, на участках закругления пути пазы не имеют постоянных промежутков, так как, с одной стороны, расстояние между пазами на наружной траектории несколько больше, чем на внутренней траектории. С другой стороны, расстояние между пазами при применении пакетов индукционных катушек внутри них постоянные, но, например, для уравнивания разности пути на наружной траектории, создаются большие промежутки между пакетами индукционных катушек по сравнению с внутренней траекторией. Кроме того, имеются зависящие от погодных условий (температурные) изменения материала, ведущие к отклонениям. Допуски могут суммироваться на значительных расстояниях в заметные разности размеров.
В основе изобретения лежит техническая задача создания устройства и способа, позволяющих автоматическую прокладку провода также и при отклонениях размеров промежутка между пазами.
Задача решается в виде устройства в признаках основного пункта формулы изобретения и в виде способа в дополнительном пункте формулы изобретения. Другие варианты выполнения указаны в подпунктах формулы изобретения.
Устройство для укладки, по меньшей мере, одного провода электродвигателя с прямолинейным полем в пазы индукционной катушки имеет, по меньшей мере, одну единицу подвижного состава, перемещающуюся на плите перекрытия. Как дополнительно будет показано, устройство для прокладки провода охватывает разнообразные технические конструкции, поэтому можно сделать так, чтобы распределить модули устройства для прокладки проводов на несколько единиц подвижного состава, которые перемещаются в виде поезда по плите перекрытия. Из-за большого веса технического оборудования может быть выгодно снабдить устройство для прокладки провода, в частности, в части запаса провода устройством выравнивания поперечного наклона пути плиты перекрытия. В качестве примера индукционной катушки можно привести, например, описание из патента DE 19620222 C1.
Устройство для укладки имеет предпочтительно на запасе проводов, как правило, на катушке кабеля, устройство для съема провода и подачи провода в формовочное устройство, в котором провод изгибается в форме меандра; инструмент для ввода меандров в пазы; монтажные салазки, на которых установлены формовочное устройство, инструмент и устройство для измерения промежутка между пазами, причем монтажные салазки, по меньшей мере, частично установлены под путем движения и могут смещаться относительно пути движения в продольном и поперечном направлениях; вычислительное устройство или блок обработки данных и управления для обработки измеренных данных и управления положением формовочного устройства, монтажными салазками и/или инструментом.
Основные операции процесса укладки для одной фазы индукционной катушки заключаются в следующем: устройство для укладки провода - далее называется как единица подвижного состава - перемещается предпочтительно с постоянной скоростью по плите перекрытия, провод непрерывно снимается с катушки кабеля и передается на монтажные салазки, на монтажных салазках расстояния между пазами измеряются измерительным устройством и размеры передаются в формовочное устройство, гибочное приспособление ритмично формует два изгиба меандра по заданным размерам, оба изгиба принимаются изгибающим устройством и изгибаются в зависимости от фазы или от положения паза, из изгибающего устройства меандры принимаются вдавливающим инструментом и вдавливаются в пазы.
Процесс движения монтажных салазок состоит из состояния покоя относительно пазов и плиты перекрытия и из опережающего относительно единицы подвижного состава движения в следующую позицию вдавливания. Во время состояния покоя меандры вдавливаются в пазы.
Процесс укладки проводов повторяется три раза для каждой фазы индукционной катушки на каждой стороне плиты перекрытия. Для этого устройство для укладки провода для каждой фазы может иметь монтажные салазки с соответствующим оборудованием так, что при одном проходе могут быть уложены провода для всех трех фаз. В более простом варианте устройство имеет только одни монтажные салазки так, что за один проход может укладываться только одна фаза.
Единица подвижного состава содержит устройство (предпочтительно лазерную измерительную систему в качестве оптоэлектронного устройства) для измерения и передачи расстояния между пазами индукционной катушки для каждой фазы; измерение может производиться в состоянии покоя или во время движения монтажных салазок. Измеренные расстояния между пазами передаются в гибочное приспособление так, что меандры провода линейного электродвигателя формируются в соответствии с данными измерений.
Кроме того, на единице подвижного состава предпочтительно имеется устройство измерения температуры. Фактическая температура передается в блок обработки данных и управления, который тем самым управляет гибочным приспособлением и/или положением салазок так, что отклонения измеренной температуры от заданной температуры пересчитываются в величины изменения (добавление или убавление) длин изгиба меандров и передаются.
Вдавливающий инструмент по усилию контролируется устройством измерения усилие-путь и сравнивается с заложенной в вычислительном устройстве заданной кривой (огибающей). Во время вдавливания в паз первоначальное сопротивление вдавливания должно быть преодолено, после полного вдавливания создается увеличивающееся сопротивление. Отклонения от характера изменения усилия позволяют сделать заключение о неправильном монтаже. Поэтому на этом критическом месте особенно контролируется автоматический процесс монтажа и прерывается, когда устройство контроля усилия сигнализирует о неправильных процессах, которые могут привести к недопустимой деформации провода.
Пример выполнения изобретения изображен на чертежах, где показано:
Фиг.1 - два примера выполнения устройств для укладки кабелей,
Фиг.2 - вид сбоку монтажных салазок,
Фиг.3 - вид сбоку лобовых частей обмотки,
Фиг.4 - гибочное приспособление,
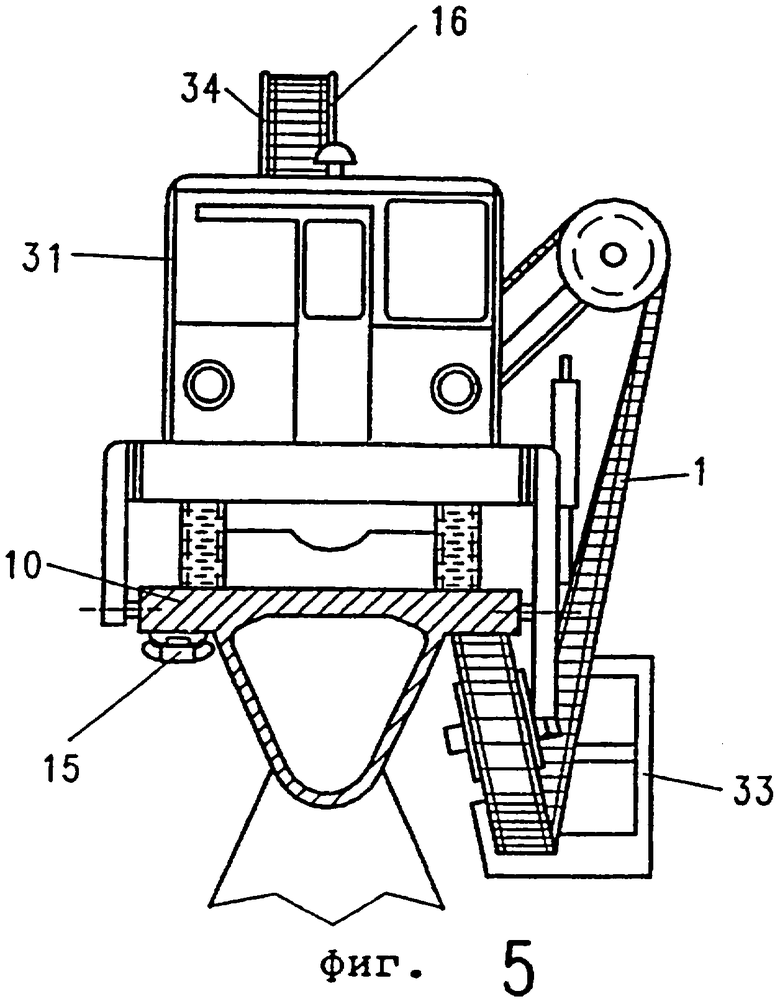
Фиг.5 - устройство согласно известному уровню техники.
На фиг.5 изображено устройство для укладки в соответствии с уровнем техники. Видно единицу подвижного состава 31 для укладки на плите 10 перекрытия пути движения. Провод снимается с катушки 34 кабеля и формируется в единице подвижного состава в меандры и вводится в зажимы. Зажимы соединены на ленточном транспортере 1 другу с другом и проведены через консоль 33 к нижней стороне плиты перекрытия и инструментом установлены в индукционной катушке 15.
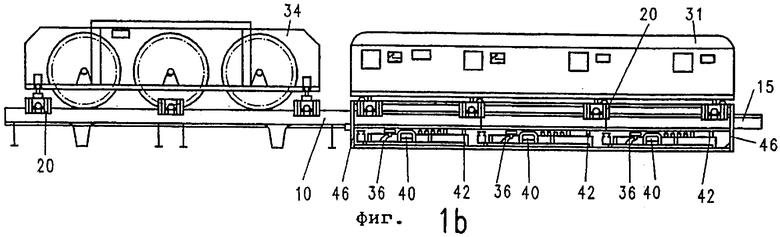
В настоящем изобретении не используются закрепленные на ленточном транспортере зажимы. На фиг.1а и 1b в общих чертах в виде сбоку изображены устройства в соответствии с изобретением. Разница между обоими устройствами 1а и 1b состоит в том, что изображенное на фиг.1а устройство пригодно для укладки провода только одной фазы, а изображенное на фиг.1b устройство может уложить за один проход провода трех фаз. Не считая этого отличия, оба устройства имеют соответствующие признаки.
В первую очередь устройство имеет единицу 31 подвижного состава, перемещаемую по плите 10 перекрытия. Кроме того, предусмотрен запас 34 для одного и соответственно трех проводов 16, причем запас 34 выполнен как отдельная единица подвижного состава. Единица 31 подвижного состава и запас 34 имеют для перемещения вдоль плиты 10 перекрытия соответствующим образом выполненные направляющие элементы 20. Тем самым единица 31 подвижного состава и запас 34 образуют поезд, перемещающийся во время укладки вдоль плиты 10 перекрытия.
С единицей 31 подвижного состава соединены монтажные салазки 46, которые охватывают плиту 10 перекрытия и частично установлены под плитой 10 перекрытия. На монтажных салазках 46 предусмотрено для каждого провода 16 фазы устройство 36, 40 для формирования меандра провода 16, содержащее гибочное приспособление 36 и изгибающее устройство 40, и инструмент 42 для вдавливания провода 16 в пазы 14. Кроме того, на монтажных салазках 46 установлено устройство 35 для снятия провода 16 с запаса 34 и подвода провода 16 в устройство 35.
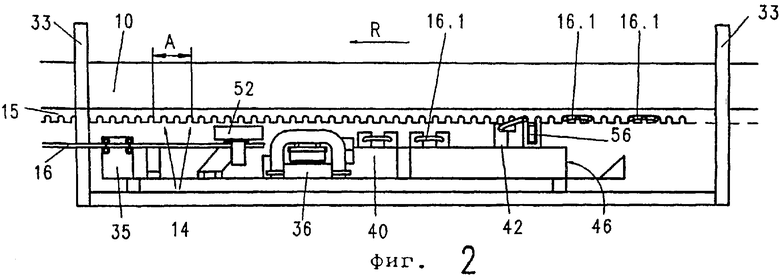
Данное положение изображено подробно на фиг.2 на виде сбоку. Под путем 10 видна индукционная катушка 15 с пазами 14. Провод 16 идет слева и вводится через съемное устройство 35 в монтажный модуль. Монтажный модуль находится в раме 33, закрепленной в виде консоли на единице подвижного состава и охватывающей плиту 10 перекрытия пути движения сбоку. В монтажном модуле установлены подвижно относительно 30 единицы подвижного состава или рамы 33 монтажные салазки 46. Единица 31 подвижного состава перемещается при монтаже в направлении стрелки R. Относящиеся к фазе пазы 14 имеют промежуток А, который оптически сканируется лазерным измерительным устройством 52. В соответствии с данными измерений промежутков между пазами, обработанными в вычислительном устройстве, в гибочном приспособлении 36 (см. фиг.4) изгибаются два изгиба меандра. Пошагово оба изгиба меандра передаются в изгибающее устройство 40, в котором изгибаются лобовые части 16.1 обмотки меандров. Изгибание поясняется подробнее в описании фиг.3. В конце монтажных салазок 46 находится вдавливающий инструмент 42, с помощью которого провод 16 вдавливается в пазы 14. Вдавливающий инструмент 42 контролируется измерительным устройством 56 усилие-путь. Кроме того, имеются устройство для измерения температуры и вычислительное устройство; они на фигурах не изображены.
С помощью изображенного монтажного блока проводниковыми меандрами одной фазы оснащается одна сторона индукционной катушки 15. Для полной укладки индукционной катушки необходимо разместить на обеих сторонах плиты перекрытия три фазы проводов.
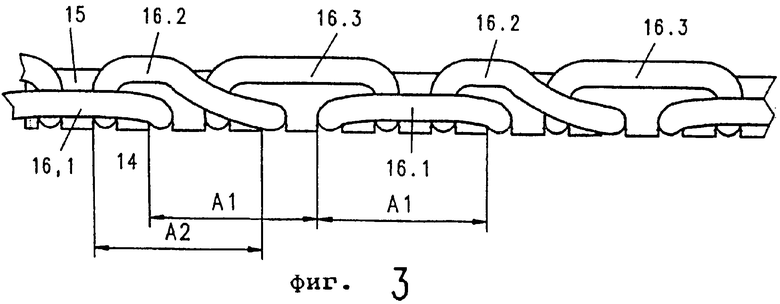
На фиг.3 видны изгибы меандров. Изгибы необходимы потому, что лобовые части 16.1, 16.2, 16.3 обмотки перекрещиваются. Посредством размещения лобовых частей обмотки друг над другом можно оптимально заполнить имеющееся пространство. Меандр (в данном случае 16.1) первой фазы индукционной катушки не имеет изгиба, во второй фазе отогнута с одной стороны вверх только лобовая часть (16.2) обмотки и в третьей фазе обе лобовые части обмотки изогнуты вверх. Промежутки между пазами двух фаз обозначены позициями А1 и А2, причем А1 и А2 являются промежутками для видимых лобовых частей 16.1 и 16.2 обмотки, а позиция А1' является промежутком соответствующей лобовой части обмотки на обратной стороне индукционной катушки (установлена в сторону внутренней части плиты перекрытия).
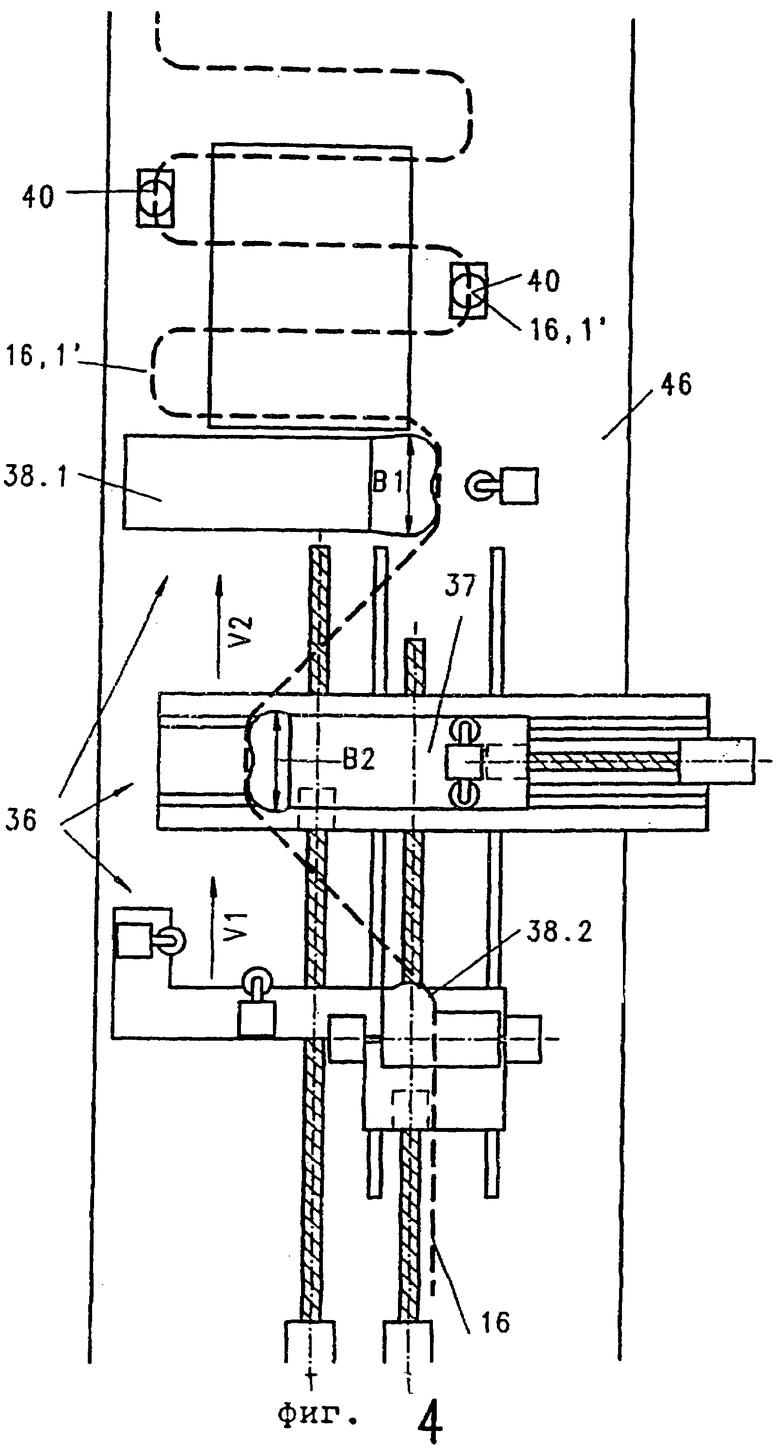
Фиг.4 схематично показывает гибочное приспособление 36 в монтажных салазках 46, вид сверху. Ось провода 16 изображена штрихпунктирной линией. Провод идет слева и принимается в гибочное приспособление 36, которое состоит из гибочного толкателя 37 и двух контропор 38.1, 38.2. Перед процессом изгиба устанавливаются размеры ширины B1, B2 гибочного толкателя 37 и первой контропоры 38.1 по данным вычислительного устройства. Размеры ширины B1, B2 соответствуют данным измерений промежутков A1, А2 между пазами, уточненным с поправкой на связанные с температурой увеличение или уменьшение. В соответствии с размерами ширины позиционируются монтажные салазки по данным вычислительного устройства так, что при вдавливании в пазы отсутствует боковое отклонение. Во время процесса гибки, при котором провод закрепляется на неподвижной контропоре 38.1, гибочный толкатель 37 производит два движения. Он перемещается вертикально относительно пути движения и на первую контропору 38.1 с первой скоростью v1. Вторая контропора 38.2 одновременно перемещается с удвоенной скоростью v2 с выбиранием длины провода на первую контропору 38.1. Затем изогнутые меандры пошагово принимаются изгибающим устройством 40, где изгибаются внутренняя и внешняя лобовые части обмотки.
Изобретение относится к способу и устройству для укладки трехфазной обмотки переменного тока в пазы растянутой по длине индукционной катушки. Устройство для укладки, по меньшей мере, одного провода электродвигателя с линейным полем в пазы размещенной под плитой перекрытия индукционной катушки содержит перемещаемую на плите перекрытия единицу подвижного состава, запас провода, устройство формирования меандров провода, устройство для съема провода с запаса и прохождения провода через это устройство, инструмент для вдавливания провода в пазы. В устройстве предусмотрены перемещающиеся относительно единицы подвижного состава монтажные салазки, которые расположены, по меньшей мере, частично под плитой перекрытия и на которых расположено устройство формирования меандров провода и инструмент. Предусмотрены также устройство для измерения положения пазов и промежутков между ними и вычислительное устройство для обработки данных измерений и управления положением монтажных салазок, устройством формирования меандров провода и инструментом. Способ укладки, по меньшей мере, одного провода электродвигателя с прямолинейным полем в пазы расположенной под плитой перекрытия индукционной катушки, при котором единицу подвижного состава приводят в движение над плитой перекрытия, провод снимают с запаса, с помощью устройства формирования меандров провода формуют в меандры и вдавливают в пазы инструментом, характеризуется тем, что монтажные салазки приводят в движение относительно единицы подвижного состава, на котором установлены устройство формирования меандров провода и инструмент. Положение пазов и расстояние между ними определяют измерительным устройством и передают в вычислительное устройство. Положением монтажных салазок, работой устройства формирования меандров провода и инструмента управляют вычислительным устройством в соответствии с данными измерения положений пазов и расстояний между ними. В результате созданы устройство и способ, которые делают возможным производить автоматическую прокладку провода даже при отклонениях размеров промежутка между пазами. 2 н и 13 з.п. ф-лы, 5 ил.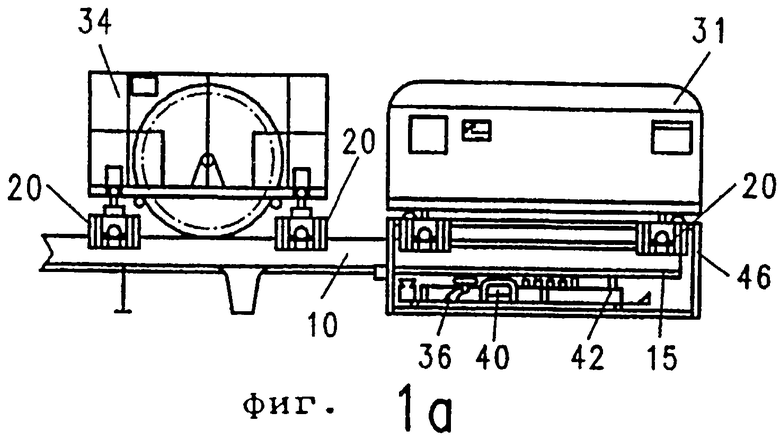
| US 4860430 А, 29.08.1989 | |||
| Устройство для укладки трехфазной обмотки переменного тока в пазы протяженного индуктора электродвигателя с прямолинейным полем | 1984 |
|
SU1321381A3 |
| Трехфазная обмотка переменного тока индуктора линейного электродвигателя | 1980 |
|
SU1109076A3 |
| Индуктор линейного электродвигателя и способ его изготовления | 1982 |
|
SU1073854A1 |

