Изобретение относится к судостроению и касается конструирования плавучих судов, предназначенных для морского подводного строительства и подъема затонувших, в том числе крупнотоннажных, судов.
Известны морские самоходные и буксируемые плавучие платформы, предназначенные для подводного строительства и добычи полезных ископаемых (1, 2). Некоторые из них могут применяться и для подъема затонувших судов. Например, использование норвежской платформы "Регалия" для подъема частей подводной лодки "Курск".
Такие платформы имеют плавающий корпус в виде понтона или сдвоенный, по типу катамарана; палубные надстройки и технологическое оборудование. К недостаткам таких устройств можно отнести малую скорость передвижения к месту работ, зависимость от действия ветра и волнения моря, ненадежность стабилизации канатно-якорными устройствами, ограничение глубины производства работ, невозможность регулирования грузоподъемности.
Известны плавающие морские платформы с опорами на дно. К ним относится передвижная двухкорпусная платформа с монтажными устройствами (3). Эта платформа состоит из надводного строения, плавающего подводного основания и трубчатой опорной колонны, перемещающейся сквозь подводное основание до упора на грунт. Эта платформа и подобные ей обеспечивают устойчивость и позволяют поднимать большие тяжести за счет опоры на грунт. Их недостатки: плохие мореходные качества, сложность монтажа опор и ограниченная глубина моря, так как длина опор любой конструкции имеет прочностные пределы.
Известны плавающие суда с малой площадью ватерлинии (4). Такие суда состоят из подповерхностных плавучих сигарообразных конструкций и опирающихся на них посредством колонн верхних надводных строений. Это устройство обеспечивает высокие мореходные качества (за счет исключения трения верхней части о воду), снижает зависимость от состояния погоды и позволяет решать определенные технологические задачи (например, возможность передвижения во льдах (5)).
Вместе с тем, применительно к требованиям производства грузоподъемных подводных работ, данное устройство имеет следующие недостатки:
- запасы плавучести и устойчивости такого судна весьма ограниченны, поскольку зависят только от возможностей балластировки его подводной части, учитывая, что силы подъема добавятся к весу надводного строения и могут действовать эксцентрично;
- соединение верхней и нижней частей судна при помощи колонн с шарнирными узлами создает нежесткие конструкции с громадными напряжениями в узлах.
Все это не отвечает требованиям прочности и надежности грузоподъемной плавающей платформы.
Известно устройство для подъема тяжеловесных крупногабаритных объектов (6), представляющие собой арочный мост, установленный на двух понтонах. При этом полые стойки моста используются для размещения грузоподъемных механизмов. Такое устройство позволяет решать задачи, связанные с упрощением конструкции привода грузоподъемных механизмов, но не решает проблему прочности, поскольку арочная конструкция на плавающих опорах не обладает большой жесткостью.
Наиболее близким к предлагаемому техническому решению является устройство плавающей платформы для разработки нефтегазовых месторождений (7). Корпус этой платформы выполнен в виде подводной лодки, находящейся в полуподводном состоянии. Внутри ее корпуса и на внешней (незатопляемой) поверхности располагается технологическое оборудование, а по бокам корпуса предусматриваются швартовочные устройства для транспортных судов. При этом платформа посредством гибких трубопроводов связана с оборудованием, расположенным на морском дне. Допускается в качестве такого устройства использовать подводные лодки, снятые с вооружения.
Подобная конструкция плавающей платформы имеет ряд преимуществ по сравнению с существующими, а именно: снижение капиталовложений в сооружение, удобство перебазирования, повышение безопасности, возможность использования готового ходового оборудования и энергоустановок (в случае применения существующих подводных лодок) и др.
Однако использование такого устройства для грузоподъемных работ с большими тяжестями не представляется возможным. Это связано с тем, что подводная лодка не обладает поперечной устойчивостью от действия боковых моментов сил, которые могут возникать при грузоподъемных работах. Предусматриваемое в данной конструкции швартовочное устройство для судов, осуществляемое известными средствами, не устранит колебания соединяемых судов и, следовательно, не позволит выполнить требования прочности и устойчивости всей системы.
Таким образом прослеживается общая тенденция в развитии морских плавающих платформ - это решение частных задач с потерей каких-либо других качественных или функциональных показателей. Например, улучшение мореходных качеств приводит к снижению или технологических возможностей или устойчивости и надежности и наоборот. При этом во всех известных направлениях отсутствует перспектива универсализации, типажности и создания на этой основе платформ многоцелевого назначения. И совсем неясным является направление создания платформ для глубоководных работ и с большими грузоподъемными возможностями.
Цель изобретения - повышение эффективности и функциональных возможностей плавающей платформы при обеспечении надежности ее конструкции.
Указанная цель достигается тем, что плавающая платформа состоит из двух самостоятельных судоходных частей: нижней и верхней, жестко связанных между собой в единую плавающую платформу. Нижняя часть включает один или несколько модулей в виде подводных лодок, оборудованных жесткими узлами крепления к верхней части, а верхняя часть представляет собой плавающий корпус, усиленный сверху арочными конструкциями, а также снабженный стыковочным комплексом для модулей.
В сборе с модулями платформа обладает суммарной и вместе с тем регулируемой грузоподъемностью (например, за счет балластировки модулей) и повышенной устойчивостью. А при одновременном использовании движителей модулей и плавающего корпуса решаются задачи получения достаточно больших транспортных скоростей и хорошего маневрирования. В зависимости от требуемой грузоподъемности и назначения платформа может создаваться на основе одного или нескольких модулей.
Широкие перспективы для данного устройства открываются в случае использования в качестве модулей существующих (например, конверсируемых) подводных лодок, учитывая совершенство их оборудования (управления, навигации, энергообеспечения и пр.).
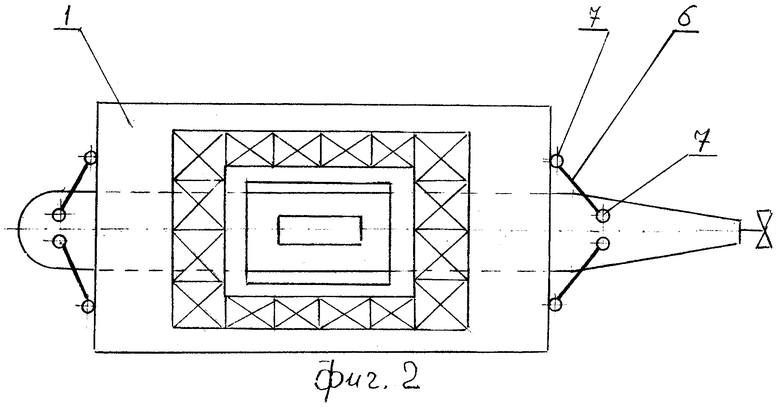
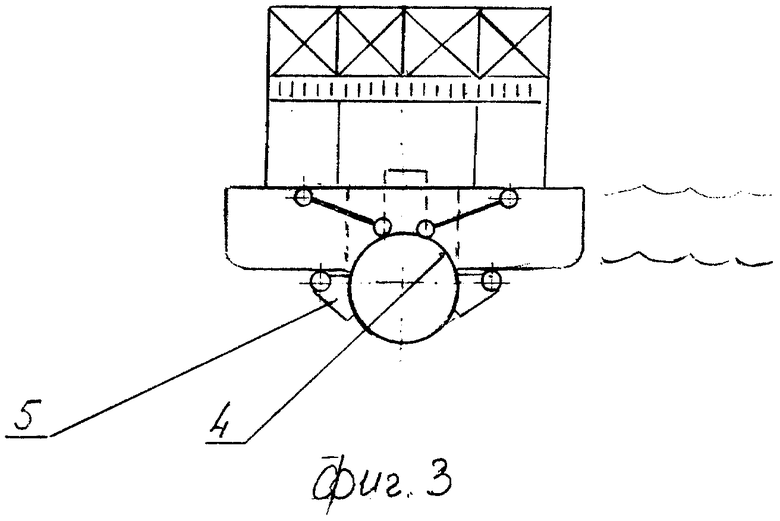
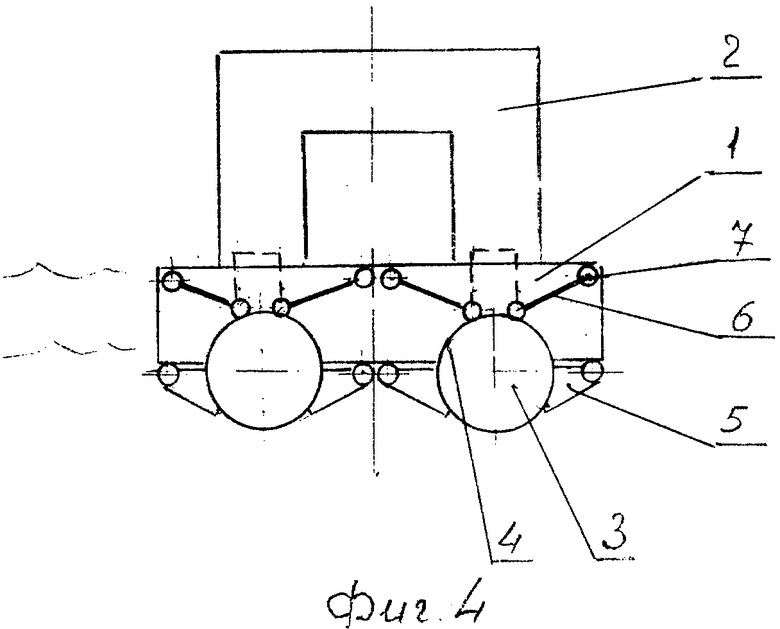
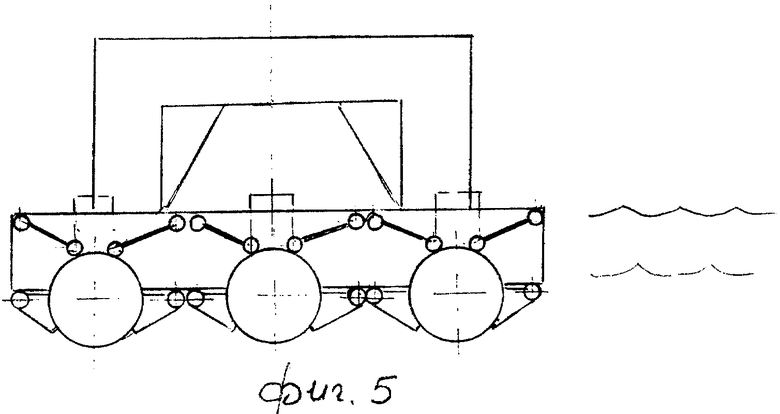
Устройство плавающей платформы с одним модулем показано на фиг.1 - вид сбоку, фиг.2 - вид сверху, фиг.3 - вид спереди, фиг.4, 5 - вид спереди с двумя и тремя модулями.
Платформа состоит из плавающего корпуса 1, усиленного сверху конструкциями 2 и жестко соединяемых с ним модулей 3 в виде подводных лодок. Для соединения модулей с корпусом служит стыковочный комплекс, включающий продольные пазы 4, расположенные в донных частях плавающего корпуса и соединительных механизмов: боковых шарнирных захватов 5, диагональных тяг 6 с узлами крепления 7. Грузоподъемное оборудование 8, 9 размещается как на палубе плавающего корпуса, так и на верхнем поясе силовых конструкций, а для удобства проведения подъемных и строительных работ в корпусе 1 могут быть предусмотрены открытые окна и клюзы.
С целью повышения прочности плавающего корпуса 1 его верхние конструкции 2 выполнены в виде продольных и поперечных арок, верхний пояс которых (для уменьшения парусности) может представлять собой мостовые фермы. При этом стойки ферм имеют водонепроницаемую конструкцию, что позволяет увеличивать глубину погружения плавающего корпуса: а) при неблагоприятных погодных условиях; б) при необходимости повышения подъемной силы путем балластировки (например, при отрыве затонувшего судна от дна).
Для выполнения маневровых работ и автономного использования плавающий корпус оборудуется движителем и двигательной установкой, обеспечивающей также и работу технологического оборудования.
При стыковке с плавающим корпусом модули 3 заводятся снизу в соответствующие пазы 4 и крепятся неподвижно механизмами 5, 6, 7. Для выполнения этих работ могут быть использованы как грузоподъемные средства платформы, так и специальные приводы.
В качестве модулей 3 могут применяться или специальные подводные лодки или существующие (например, конверсируемые), но способные работать на малых глубинах. Такие подводные лодки должны быть освобождены от боевого снаряжения и оборудованы узлами крепления 7. При этом должны быть сохранены движители, системы управления, навигации, балластировки и энергообеспечения, которые могут быть использованы при работе платформы.
В соединении с модулями плавающий корпус образует единую плавающую платформу с управлением из общего центра. В зависимости от требуемой грузоподъемности и назначения такая платформа может быть выполнена в разных вариантах с различным количеством модулей - фиг.4, 5.
К преимуществам предлагаемого устройства плавающей платформы можно отнести:
- возможность создания платформ разных классов (типажа) по грузоподъемности и назначению, используя различное количество модулей;
- увеличение транспортных скоростей и сокращение сроков доставки к месту работ;
- улучшение маневровых качеств и возможности производства работ без канатно-якорных устройств;
- меньшая зависимость от погодных условий;
- снижение сроков создания и финансовых затрат в случае использования существующих подводных лодок. Этот вариант является предпочтительным, поскольку позволяет использовать высокоэффективное оборудование современных подводных лодок.
Источники информации
1. Ж. "Строительные и дорожные машины", №5, 2002.
2. Гольдин Э.Р. Подводно-технические работы, технология и средства механизации. М.: Транспорт, 1987.
3. А.с. СССР №1749374, кл. Е 02 В 17/00, БИ №27, 1992.
4. Кузменко А.В. Суда с малой площадью ватерлинии /Судостроение, №8, 1993.
5. Патент СССР, №917690, кл. В 63 В 35/12, БИ №12, 1982.
6. А.с. СССР №1615043, кл. В 63 В 35/00, В 66 С 23/50, БИ №47, 1990.
7. Патент РФ №2016169, кл. Е 02 В 17/00, БИ №13, 1994.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДОПОДЪЕМНИК-СПАСАТЕЛЬ | 2003 |
|
RU2261819C2 |
| ПЛАВУЧАЯ ПОЛУПОГРУЖНАЯ МОРСКАЯ ПЛАТФОРМА | 1999 |
|
RU2163874C1 |
| СПОСОБ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ ОБЪЕКТОВ | 2009 |
|
RU2417921C2 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2009 |
|
RU2390460C1 |
| ПОДВОДНО-СПАСАТЕЛЬНЫЙ КОМПЛЕКС С ВЛОЖЕННЫМИ МНОГОФУНКЦИОНАЛЬНЫМИ КАПСУЛАМИ | 2012 |
|
RU2474511C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШИХ ОБЪЕКТОВ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2230002C2 |
| СИСТЕМА ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК | 2018 |
|
RU2707472C1 |
| ПОДВОДНЫЙ ТРАСПОРТНЫЙ КОМПЛЕКС | 2007 |
|
RU2356779C2 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА | 2001 |
|
RU2246421C2 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 2005 |
|
RU2359861C2 |
Плавающая платформа для морского строительства и подъема затонувших судов содержит плавающий корпус с двигательно-дижительной установкой и грузоподъемным оборудованием, а также, по меньшей мере, один самостоятельный нижний модуль. Этот модуль выполнен в виде подводной лодки и жестко соединен с плавающим корпусом посредством стыковочного комплекса, включающего в себя выполненный в днище плавающего корпуса продольный паз, в который заведен нижний модуль, боковые шарнирные захваты и диагональные тяги с узлами крепления к плавающему корпусу и корпусу этого модуля. Плавающий корпус усилен расположенными на его палубе продольными и поперечными арочными конструкциями с водонепроницаемыми опорными стойками. Такое выполнение платформы обеспечивает расширение ее функциональных возможностей и повышение эффективности ее использования. 5 ил.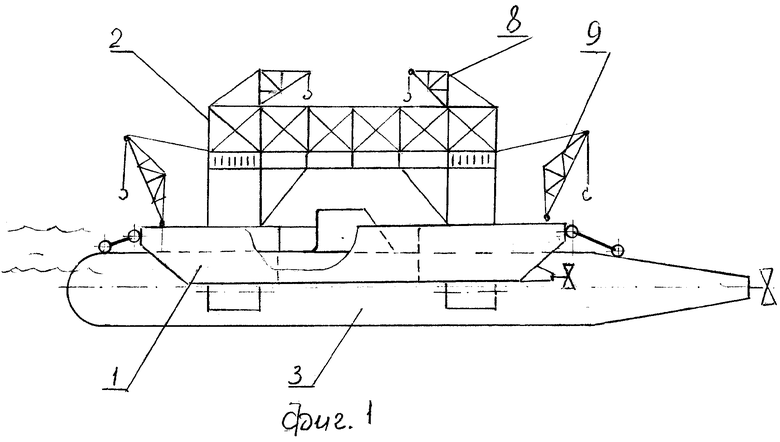
Плавающая платформа для морского строительства и подъема затонувших судов, содержащая плавающий корпус с двигательно-движительной установкой и грузоподъемным оборудованием, отличающаяся тем, что она снабжена, по меньшей мере, одним самостоятельным нижним модулем, выполненным в виде подводной лодки и жестко соединенным с плавающим корпусом посредством стыковочного комплекса, включающего в себя выполненный в днище плавающего корпуса продольный паз, в который заведен нижний модуль, боковые шарнирные захваты и диагональные тяги с узлами крепления к плавающему корпусу и корпусу этого модуля, при этом плавающий корпус усилен расположенными на его палубе продольными и поперечными арочными конструкциями с водонепроницаемыми опорными стойками.
| US 1933269 А, 31.10.1933 | |||
| Устройство дистанционного управления объективом | 1988 |
|
SU1659647A1 |
| Устройство для щелевой съемки волнения моря | 1986 |
|
SU1381333A1 |
| ПЛАВУЧАЯ ПОЛУПОГРУЖНАЯ МОРСКАЯ ПЛАТФОРМА | 1999 |
|
RU2163874C1 |

