Изобретение относится к морскому транспорту, а именно к подводному транспортному комплексу, создающему возможность перевозки грузов в любое время года и при любой ледовой обстановке в экстремальных условиях Северного Ледовитого океана.
Известна транспортная система, включающая: морские порты надводного базирования (журнал «Военный парад» №1, 2007 г., стр.60, 61), морские суда ледокольного типа (Военный Парад, №5, 2005 г., стр.32), спутниковую навигационную систему. В экстремально суровых условиях севера морские порты покрываются льдом, что затрудняет швартовку и усложняет обработку грузов. Ледоколы решают проблему перевозки грузов, но в условиях прохождения тяжелых льдов имеют малую крейсерскую скорость.
Известны транспортные системы, включающие подводные лодки военного назначения, базирующиеся в надводных портах (журнал «Военный парад», №1, 2006 г.) и способные перемещаться подо льдом на большие расстояния (Журнал «Военный парад», №6, 2006 г., стр.36) и имеющие навигационную гидроакустическую систему (Подводные лодки. Шунков В.Н. М., изд. Попурри, 2005. с. - 608, журнал «Военный парад», №5, 2005 г., с.30). Достоинством подводных лодок является высокая крейсерская скорость и способность перемещаться в подводном положении подо льдом. Но навигационная гидроакустическая система не обеспечивает безопасность подводного плавания подводных лодок. Например, подводные лодки ВМС США с 1983 по 1987 гг. участвовали в 56 столкновениях в т.ч. с зарубежными морскими судами (журнал «Военный парад», №4, 2006 г., стр.50). Причиной, снижающей качество навигационной гидроакустической системы, служат «зеркала», «подводные линзы» и «пузырьковые экраны», а также снижение в 4-5 раз дальности действия гидроакустических сигналов на мелководье.
Известны конструкции подводных лодок (изобретение 2078709 С1, 6 63В 3/13, B63G 8/00; 2116926 С1. 6, В63В 3/00, 3/13). В предлагаемых конструкциях решаются проблемы прочности. Но технологические возможности по перевозке грузов очень ограничены, как из-за сложности погрузки, так и разгрузки.
Наиболее близкими аналогами могут служить изобретения (2223887 С1 7, В63В 3/13, B63G 8/00, 2051064 С1 В 3/13, D63G 8/00). Заслуживает внимания модульное построение корпуса ПЛ. Однако преимуществами модульной конструкции является то, что ее, можно использовать только на ремонтных заводах при глубокой модификации ПЛ. В патенте 2051064 представлена удачная компоновка поперечного сечения корпуса ПЛ. Но нет конструктивного решения по загрузке груза в отсеки.
Известны системы подводной навигации В63С 7/26, В63В 22/22, патент РФ 2155699 28.08.1996. Сигнальный буй выпускается из корпуса затонувшего судна. Такой буй, снабженный световым и радиосигнальным устройством, эффективен только для маркировки мест аварии подводных лодок (ПЛ).
Задача, решаемая изобретением, состоит в разработке подводного транспортного комплекса, включающего 1) морские порты, способные принимать грузовые подводные лодки (ГПЛ) в подводном положении, поднимать их в надводное положение для разгрузочно-погрузочных работ и отправлять лодки из порта в подводном положении, 2) в разработке грузовых подводных лодок модульного типа, каждый модуль которых имеет функциональное назначение, а именно силовой буксировочный модуль, сменный грузовой модуль со сквозными продольными отсеками, обеспечивающими быструю в т.ч. автоматическую разгрузку и загрузку грузов, и хвостовой модуль-обтекатель, 3) в разработке двухрядной подводной трассы с профилированным фарватером на мелководных участках и с закрепленным по оси трассы специальным сигнальным подводным кабелем и 4) в разработке стационарной подводной навигационной системы нового поколения.
Техническим результатом изобретения является использование морской воды подо льдом в качестве рабочей среды для прохождения грузовых подводных лодок в любое время года и при любых погодных условиях, высокую маневренность ГПЛ при автоматической швартовке на грузовой поворотно-подъемной платформе морского порта, что в полной мере обеспечивает решение транспортной и энергетической безопасности в зоне побережья Северного Ледовитого океана (СЛО) и восточного побережья страны.
Технический результат достигается тем, что морские порты 1) имеют внутреннее, свободное ото льда водное пространство; 2) оснащены подьемно-поворотными платформами, обеспечивающими швартовку ГПЛ в подводном положении, подъем ее для разгрузки в надводное положение, 3) высокой скоростью перемещения ГПЛ подо льдом, широкими технологическими возможностями и малыми затратами времени на обработку грузов, 4) соединены между собой подводными трассами; 4) подводные трассы оснащены подводной навигационной системой с трех кратным резервированием.
Кроме того, технический результат, проявляющийся в расширении технологических возможностей в перевозке грузов, состоит в том, что ГПЛ конструктивно выполнена из трех функциональных модулей, при этом головной модуль выполнен в виде силового буксировочного модуля, средний сменный модуль выполнен грузовым с возможностью размещения минимум в два яруса стандартных грузовых контейнеров, или пассажирских модулей, или стандартных цистерн перевозки жидких или газообразных грузов, а концевой функциональный модуль конструктивно выполнен как модуль-обтекатель и выполняет задачу балластных цистерн. При этом в силовом буксировочном модуле и хвостовом модуле-обтекателе размещены выдвижные подруливающие устройства, обеспечивающие необходимую маневренность ГПЛ при швартовке на грузовую платформу.
Технический результат, проявляющийся в безопасности движения ГПЛ с большой крейсерской скоростью, достигается тем, что силовой буксировочный модуль снабжен комбинированной подводной навигационной системой, позволяющей как иметь без всплытия постоянную связь с центром управления движением, так и иметь информацию о водной, ледовой обстановке по всей трассе, а также иметь информацию о положении ГПЛ на трассе посредством связи с приемо-передающими устройствами, закрепленными на кабеле, который проложен по оси подводной трассы.
Предлагаемая конструкция подводного транспортного комплекса в целом может стать универсальным типом конструкции морских портов, грузовых подводных лодок и подводных трасс, оснащенных трех кратно резервированной подводной навигационной системой, что является новым универсальным решением в перемещении грузов в экстремальных условиях северных широт и восточного побережья Охотского моря.
Сущность изобретения поясняется фиг.1-22, на которых представлены: на фиг.1 - вид в плане общей схемы подводного транспортного комплекса, на фиг.2 - то же, сеч. А-А, на фиг.3 - то же, сеч. по В-В, на фиг.4 - вид в плане на поверхность пола морского порта, на фиг.5 - то же, сеч. Г-Г, с подъемно-поворотной платформой в нижнем подводном положении, на фиг.6 то же, с платформой в верхнем надводном положении, на фиг.7 - вид в плане на пол морского порта с платформой в надводном положении после поворота на 90 градусов, на фиг.8 - сеч. Г-Г с ГПЛ, повернутой с платформой на 90 градусов, на фиг 9 - вид в плане на пол морского порта с отстыкованным грузовым модулем, на фиг.10 - вид в плане на пол морского порта с платформой, повернутой на 180 градусов с пристыкованным загруженным грузовым модулем, на фиг.11 - морской порт с платформой в нижнем подводном положении и уходящей ГПЛ по трассе, на фиг.12 - вид спереди на платформу с пришвартованной ГПЛ, а на фиг.13 - устройство фиксации ГПЛ при швартовке на подъемно-поворотной платформе, на фиг.14 - опорные танкетки при виде сбоку, на фиг.15 - вид в плане на ГПЛ, на фиг.16 - то же, с расстыкованными функциональными модулями, на фиг.17 - вид спереди на ГПЛ, на фиг.18 - вид спереди на сменный грузовой отсек с загруженными стандартными контейнерами, на фиг.19 - то же, в варианте перевозки жидких или газообразных грузов в стандартных цистернах, на фиг.20 - то же, в варианте перевозки пассажирских кабин, на фиг.21 - типовой стык по силовым обшивкам, на фиг.22 - стык силовых элементов вертикальных стенок модулей.
Подводный транспортный комплекс содержит (фиг.1): морские порты 1, грузовые подводные лодки 2, подводную трассу 3, осевой кабель 4, осевые сигнальные устройства 5, габаритные сигнальные устройства 6, (фиг.2) морскую воду (рабочая среда) 7, ледовое покрытие океана 8, донный грунт 9, (фиг.3) профилированные участки трассы 3, (фиг 4) постамент 11, подъемное устройство 12, поворотную платформу 13, центрирующие ложементы 14, опорные танкетки 15, швартовочные устройства 16, разгрузочную площадку 17, погрузочную площадку 18, боковые откосы и пандус 19, защитный козырек 20, тоннель 21, (фиг.15) грузовую подводную лодку в сборе 2, (фиг.16) силовой буксировочный модуль 22, грузовой модуль 23, хвостовой модуль-обтекатель 24 с выдвижным подруливающим устройством 38, (фиг.17) гондолы 25 с ходовыми винтами 39 и пилоны 26, кабину экипажа 27, силовую обшивку ГПЛ 28, нижние силовые бимсы 29, устройство приема и передачи информации подводной навигационной системы 30, верхние силовые бимсы 31 с отверстиями и выдвижное подруливающее устройство 38, (фиг.18) узлы подъема ГПЛ при аварийной ситуации 31, силовую обшивку 34 боковых отсеков и контейнеры 40, (фиг.19) боковые отсеки 35 и стандартные цистерны 36, (фиг.20) силовые лонжероны-стенки 32 и 33, пассажирские кабины 42, (фиг.21) стык силовых обшивок с помощью устройства 37, (фиг.22) стык силовых лонжеронов с помощью устройства 36.
Подводный транспортный комплекс работает следующим образом.
Грузовая подводная лодка 2 в подводном положении, следуя по трассе 3 в среде морской воды 7 и подо льдом 8, через тоннель 21 входит в рабочую зону морского порта 1, свободную ото льда, и швартуется с помощью центрирующих ложементов 14, опорных танкеток 15 и фиксирующих устройств 16, входящих в пазы нижних силовых бимсов 29, на подъемно-поворотную платформу 13. При необходимости, в начальный момент швартовки, положение ГПЛ относительно платформы 13 корректируется с помощью подруливающих устройств 38, расположенных в носовой части буксировочного модуля 22 и хвостовой части модуля-обтекателя 24. В этом положении ГПЛ 2 вместе с платформой 13 с помощью подъемного устройства 12, опирающегося на постамент 11, поднимается в надводное положение. Ложементы 14 отводятся в исходное положение. Платформа 13 поворачивается на 90 градусов. Сменный грузовой модуль 23, вместе с хвостовым модулем-обтекателем 24 отстыковывается от головного силового буксировочного модуля 22 и по роликам 10 танкеток 15 отводится на разгрузочную площадку 17, после чего платформа 13 поворачивается еще на 90 градусов. С погрузочной площадки 18 на платформу 13 подается снаряженный грузовой модуль 23 с пристыкованным модулем 24. Проводится стыковка грузового модуля 24 к буксировочному модулю 23. После посадки экипажа в кабину 27 платформа 13 опускается в нижнее подводное положение. Производится освобождение швартовочных устройств 16, и ГПЛ 2 своим ходом, ориентируясь на осевой кабель 4 и датчики 5 и 6 подводный трассы 3, покидает морской порт 1. ГПЛ уходит в следующий порт назначения строго по фарватеру подводной трассы 3 и, в частности, ориентируясь своим приемо-передающим устройством 30 на приемо-передающие устройства 5 и 6. В зонах критического мелководья дно 9 трассы 3 профилируется до достижения заданной глубины. Устройства 5 обозначают ось трассы, принимают и передают информацию о состоянии трассы на всем ее протяжении, принимают и передают информацию в центр управления движением. Датчики 5 закреплены на осевом кабеле 4. Боковые сигнальные устройства 6 дают информацию на командный пункт ГПЛ о температуре и плотности морской воды 7, направлению и скорости подводных течений, глубины дна 9 и состоянии ледового покрытия 8. По кабелю 4 передается информация на ГПЛ через приемо-передающее устройство 30, на командный пункт о состоянии подводной трассы 3, как непосредственно перед ГПЛ, так и на всем ее протяжении до порта назначения. По кабелю 4 передается информация о движении ГПЛ по подводной трассе и осуществляется оперативная связь с Центром управления движением. Козырек 20 морского порта 1 защищает внутренний водный бассейн от проникновения внешнего льда. Силовую схему ГПЛ 2 образуют радиусные внешние обшивки 28 и 34, а также вертикальные стенки-лонжероны 32 и 33, при этом лонжероны 33 в своей нижней части переходят в силовой бимс 29 с отверстиями для входа фиксирующих элементов швартовочного устройства 16. Верхняя часть лонжерона 33 переходит в силовой бимс 31, с такелажными отверстиями для транспортировки или быстрого подъема ГПЛ 2 в случае аварии. Лонжероны 32 и 33 при стыковке модулей соединяются в единую силовую схему посредством стыковочных узлов 36, а силовые обшивки автоматически стыкуются с помощью устройств 37. Боковые отсеки 34 выполняют роль балластных цистерн.
Высокая маневренность ГПЛ 2 в процессе подводного плавания обеспечивается управлением вектора тяги поворотных гондол 25, а в процессе швартовки еще и носовым и хвостовым подруливающим устройством 38.
В сменном грузовом модуле 23 в зависимости от назначения рейса могут быть размещены стандартные грузовые контейнеры 39, стандартные цистерны для перевозки жидких грузов 40 или кабины 41 с пассажирами, в т.ч. стандартные пассажирские вагоны. При перевозке крупногабаритных нестандартных грузов могут быть сняты некоторые вертикальные и горизонтальные разделительные перегородки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАТРУЛЬНЫЙ КОМПЛЕКС | 2007 |
|
RU2389639C2 |
| СПОСОБ ПОДВОДНОГО ПЕРЕМЕЩЕНИЯ ГРУЗОВ | 2024 |
|
RU2829977C1 |
| СПОСОБ ДОБЫЧИ И ТРАНСПОРТИРОВКИ ГАЗОВЫХ ГИДРАТОВ ДОННЫХ ОТЛОЖЕНИЙ И ПОДВОДНАЯ ЛОДКА ДЛЯ ДОБЫЧИ И ТРАНСПОРТИРОВКИ ГАЗОВЫХ ГИДРАТОВ | 2014 |
|
RU2554374C1 |
| СПОСОБ ПРОВОДКИ, ШВАРТОВКИ И ОТШВАРТОВКИ МОРСКОГО ГРУЗОВОГО СУДНА В АВТОНОМНОМ РЕЖИМЕ И СПОСОБ РАБОТЫ ЦИФРОВОЙ ИНСТРУМЕНТАЛЬНОЙ ПЛАТФОРМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГРУППЫ АВТОНОМНЫХ СУДОВ-БУКСИРОВ В ПОРТОВОЙ АКВАТОРИИ | 2023 |
|
RU2809129C1 |
| Устройство для доставки углеводородов в арктическом бассейне | 2018 |
|
RU2700518C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИЕЙ ПОТРЕБИТЕЛЕЙ В ЗАКРЫВАЕМЫХ ЛЬДАМИ АКВАТОРИЯХ ШЕЛЬФА И ПОДВОДНАЯ АТОМНАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2399104C2 |
| КОМПЛЕКС ДЛЯ РАЗРАБОТКИ ПОДВОДНЫХ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2006 |
|
RU2349489C2 |
| СПОСОБ ПРОТИВОТОРПЕДНОЙ ЗАЩИТЫ КОРАБЛЯ ИЛИ ПОДВОДНОЙ ЛОДКИ | 2015 |
|
RU2639298C2 |
| КОМПЛЕКС ПЛАВСРЕДСТВ ДЛЯ МОРСКОЙ ТРАНСПОРТИРОВКИ ОБЛУЧЕННОГО ЯДЕРНОГО ТОПЛИВА АТОМНЫХ ЭНЕРГЕТИЧЕСКИХ УСТАНОВОК ПОДВОДНЫХ ЛОДОК, КОРАБЛЕЙ И СУДОВ | 2002 |
|
RU2218288C1 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
Изобретение относится к морскому транспорту, а именно к подводному транспортному комплексу, создающему возможность перевозки грузов в экстремальных условиях Северного Ледовитого океана. Подводный транспортный комплекс содержит морские оснащенные порты надводного базирования, надводные ледокольного типа морские суда или подводные лодки с силовыми радиусными обшивками и необходимым комплексом систем, морские порты, подводные соединяющие их трассы, подводную стационарную навигационную систему и состав грузовых подводных лодок. Вдоль оси трассы неподвижно закреплен сигнальный кабель. При этом каждый морской порт конструктивно выполнен с внутренним водоемом и размещенной в водоеме платформой с подъемным устройством, с возможностью принимать и отправлять грузовые подводные лодки в подводном положении. Повышается безопасность движения грузовых подводных лодок с большой скоростью. 3 з.п. ф-лы, 22 ил.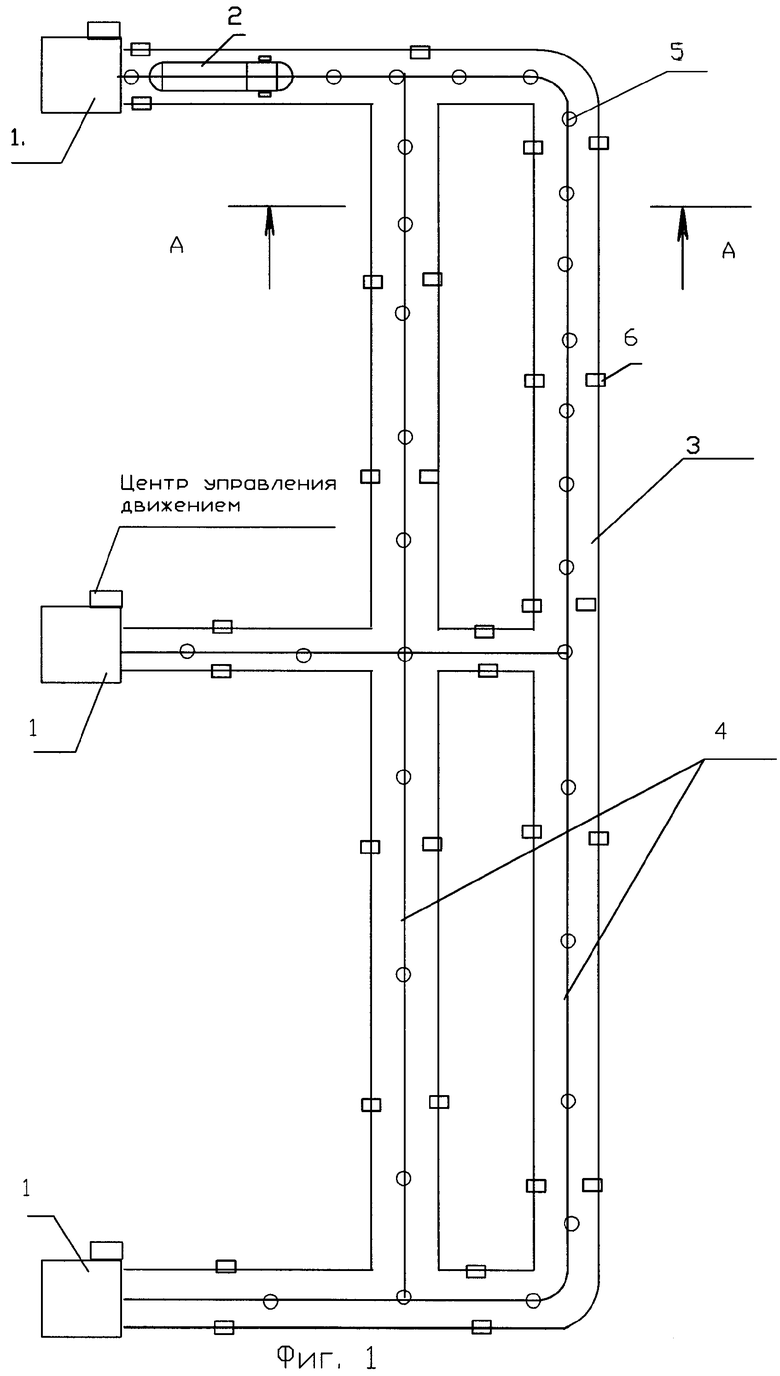
1. Подводный транспортный комплекс, содержащий морские оснащенные порты надводного базирования, надводные ледокольного типа морские суда или подводные лодки с силовыми радиусными обшивками и необходимым комплексом систем, в том числе с навигационной системой спутникового или гидроакустического типа, отличающийся тем, что, с целью обеспечения перевозки грузов под водой с находящимся на поверхности воды ледовым покрытием в любое время года и при любой погоде, комплекс содержит морские порты, подводные соединяющие их трассы, сигнальный кабель, неподвижно закрепленный вдоль оси трассы, подводную стационарную навигационную систему и состав грузовых подводных лодок, при этом каждый морской порт конструктивно выполнен с внутренним водоемом, свободным ото льда, и размещенной в водоеме платформой с подъемным устройством, опирающейся на постамент, с возможностью принимать и отправлять грузовые подводные лодки в подводном положении, причем грузовая платформа с пришвартованным в подводном положении судном имеет возможность подъема в надводное положение с поворотом на заданные углы и опускания платформы в подводное положение, соответствующее началу подводной трассы, имеющей в зонах критического мелководья профилированные участки и неподвижно закрепленный вдоль оси всей трассы сигнальный кабель, к которому присоединены приемопередающие устройства связи с грузовыми подводными лодками, конструктивно состоящими из функциональных модулей: буксировочного, сменного грузового и хвостового обтекателя, первый из которых снабжен вынесенными на борта пилонами с подвижно закрепленными гондолами с размещенными внутри ходовыми винтами, сменный грузовой модуль выполнен со сквозными грузовыми отсеками и в состыкованном виде все модули составляют единую силовую конструкцию и внешний обвод с расположенными в носовой и хвостовой частях выдвижными подруливающими устройствами.
2. Подводный транспортный комплекс по п.1, отличающийся тем, что возможна автоматическая швартовка грузовых подводных лодок на приемно-поворотную грузовую платформу в подводном положении, при этом грузовая платформа содержит устройства центрирования и устройства фиксации силовых бимсов грузовой подводной лодки при швартовке.
3. Подводный транспортный комплекс по п.1, отличающийся тем, что, с целью надежного ориентирования грузовых подводных лодок в водном пространстве относительно оси и поверхности трассы, ледового покрытия на поверхности воды и для постоянной связи, без всплытия, с центром управления движением, его подводная навигационная система содержит приемопередающие устройства, выполненные с возможностью передачи сигналов на приборы грузовых подводных лодок и центр управления движением о величине смещения от оси трассы в режиме реального времени, положения на дистанции трассы, а боковые приемопередающие устройства выполнены с возможностью передачи информации о плотности морской воды, скорости течений и состоянии поверхности трассы и ледового покрытия, причем расстояние между приемопередающими устройствами определяется зоной устойчивого сигнала каждой из трех резервных сигнальных систем.
4. Подводный транспортный комплекс по п.1, отличающийся тем, что, с целью обеспечения высокой надежности, выступающие на нижней поверхности бимсы, участвуя в силовой схеме лонжеронов, обеспечивают своими пазами автоматическую швартовку, а выступающие на верхней поверхности части лонжеронов выполнены с возможностью автоматического присоединения конструктивных элементов спасательных средств в аварийной ситуации и как силовые элементы при касании ледового покрытия, а в носовой части корпуса лодки размещены приемопередающие устройства связи с подводной навигационной системой, внешняя форма лодки конструктивно выполнена в два яруса грузовых отсеков по высоте, а ширина грузовых подводных лодок определяется возможностью размещения не менее, например, четырех контейнеров, причем вертикальные стенки между секциями сменного грузового модуля выполнены как силовые лонжероны.
| ДИОМИДОВ М.Н., ДМИТРИЕВ А.Н | |||
| ПОКОРЕНИЕ ГЛУБИН | |||
| - Л.: СУДОСТРОЕНИЕ, 1974, стр.268-271 | |||
| СУДА И СУДОХОДСТВО БУДУЩЕГО | |||
| - Л.: СУДОСТРОЕНИЕ, 1981, стр.98 рис.72, стр.189 рис.169 | |||
| Устройство для передачи и приема дискретной информации по оптическому каналу с импульсно-кодовой модуляцией | 1983 |
|
SU1218904A1 |

