Изобретение относится к судоподъемным и аварийно-спасательным работам по подъему затонувших объектов.
Известен способ подъема затонувшего объекта с помощью тросовых захватов, опускаемых с надводного судна катамаранного типа, заводимых под затонувший объект самоходным подводным аппаратом (патент RU 2043257 С1). Известен также способ подъема затонувшего объекта, заключающийся в соединении этого объекта посредством гибких связей с подъемными устройствами спасательного судна катамаранного типа, распределенными равномерно вдоль корпуса катамарана (патент RU 2269448 С2).
Существенными недостатками известных способов подъема затонувших объектов являются: необходимость выполнения сложных и трудоемких подводно-технических работ с участием водолазов, связанных с соединением тросовых захватов с корпусом поднимаемого объекта, весьма сложная конструкция спасательного судна катамаранного типа с жесткими поперечными связями между корпусами, с учетом обеспечения прочности при работе в морских условиях и с множеством грузовых лебедок с ограниченной канатоемкостью барабанов и, соответственно, глубиной опускания захватов.
Известно также грузоподъемное судно катамаранного типа с механическим захватным устройством, подвешиваемым на выдвижных колоннах (авторское свидетельство №885101, М.кл. В63С 7/02). Его недостатком является, помимо сложности конструкции катамаранного судна, также весьма ограниченная глубина погружения захвата.
Общим недостатком названных решений является узкая функциональная возможность применения только для подъема затонувших объектов в конкретных ограниченных условиях, а также проблематичность оперативного морского перехода к месту аварии громоздкого плавучего сооружения катамаранного типа и безопасного транспортирования в морских условиях поднятого затонувшего судна в подвешенном состоянии между корпусами катамаранов.
Указанные недостатки отсутствуют в патентуемом способе подъема и транспортирования затонувших подводных лодок и других объектов.
Целью изобретения является осуществление подъема затонувших подводных лодок и других объектов с различных, в том числе больших, глубин без применения подводно-технических работ по застропке поднимаемого объекта и последующего безопасного транспортирования поднятого судна в морских условиях.
Осуществление изобретения позволит устранить недостатки существующих способов подъема затонувших судов и расширить эксплуатационно-технические возможности применяемых средств не только для подъема затонувших судов с различных глубин, но и для их безопасного транспортирования в морских условиях к месту их ремонта или утилизации.
Этот технический результат достигается тем, что для подъема и транспортирования затопленных объектов применяется комплекс специальных устройств в виде отдельных модулей с большими функциональными возможностями, объединяемых в единый судоподъемный модульный комплекс-док.
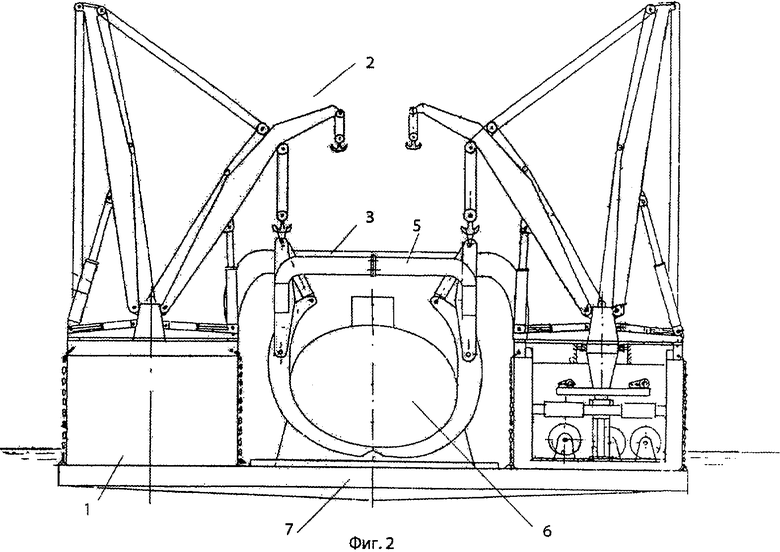
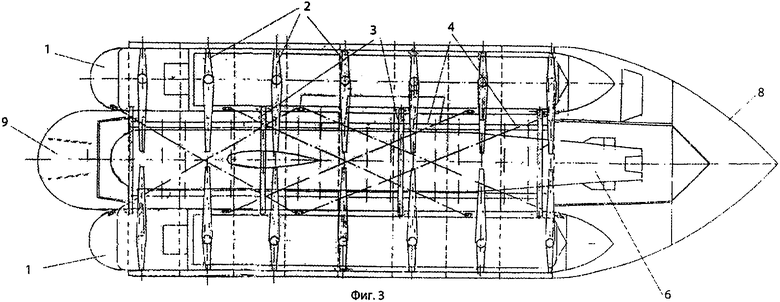
Отличительной особенностью изобретения является то, что подъем и последующее транспортирование затонувшего судна осуществляется двумя автономными плавучими подъемными средствами, оперативно прибывающими к месту катастрофы, объединяемыми с помощью специальных устройств в единый судоподъемный комплекс-док, осуществляющий подъем затонувшего судна с различных, в том числе больших, глубин без выполнения подводных работ по застропке судна и последующее безопасное транспортирование в самоходном доке с необходимыми мореходными качествами (показано на чертежах: фиг.1 - захват и начало подъема затонувшей подводной лодки, фиг.2 - подводная лодка в транспортном положении в доке, поперечный разрез, фиг.3 - вид сверху на судоподъемный модульный комплекс-док с транспортируемой подводной лодкой).
Работа по подъему и транспортированию затонувших подводных лодок и других объектов патентуемым способом осуществляется следующим образом. К месту нахождения затонувшего объекта оперативно прибывают два самоходных подъемных средства 1 с грузоподъемными устройствами 2 и доставляются несамоходные дополнительные модули. Корпусы подъемных средств соединяются поперечными шарнирными балками 3 и продольными канатными растяжками 4 в единый судоподъемный комплекс. На канаты грузоподъемных устройств навешивается автоматическое дистанционно управляемое захватное устройство 5, с помощью которого осуществляется охват затонувшего судна 6 без его обжатия и подъем с предварительным устранением «присоса корпуса» к грунту путем изменения угла наклона захвата на первой стадии подъема. По окончании подъема судна 6 под днища корпусов подъемных средств 2 подводятся балластирующиеся понтоны 7, присоединяются носовая 8 и кормовая 9 плавучие приставки, образующие вместе с корпусами подъемных средств 1 плавучий самоходный осушаемый док (фиг.3), в котором размещается и безопасно транспортируется поднятое судно 6 к месту его ремонта или утилизации.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2009 |
|
RU2390460C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА И КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2012 |
|
RU2479460C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА И КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2014 |
|
RU2564271C1 |
| МОБИЛЬНЫЙ СУДОПОДЪЕМНЫЙ МОДУЛЬНЫЙ КОМПЛЕКС ДЛЯ ПОДЪЕМА С БОЛЬШИХ ГЛУБИН | 2019 |
|
RU2718494C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 2002 |
|
RU2229418C2 |
| Модульный судоподъемный комплекс-док | 2020 |
|
RU2747062C1 |
| Мобильный судоподъемный модульный комплекс-док | 2019 |
|
RU2714831C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 2003 |
|
RU2269448C2 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ОБЪЕКТОВ | 2020 |
|
RU2755358C1 |
| Способ подъема со дна судов и подводных лодок | 2023 |
|
RU2821376C1 |
Изобретение относится к судоподъемным и аварийно-спасательным работам по подъему затонувших объектов. Способ подъема и транспортирования затонувших подводных лодок и других объектов включает в себя оперативное прибытие к месту нахождения затонувшего объекта двух самоходных подъемных средств (1) с захватными устройствами (2). Корпусы подъемных средств объединяют в единый судоподъемный комплекс-док. С помощью дистанционно управляемого устройства (5), навешиваемого на грузоподъемные устройства плавучих подъемных средств, осуществляют охват затонувшего судна (6) без его обжатия, его подъем и транспортирование в закрытом самоходном доке. Достигается расширение эксплуатационно-технических возможностей применяемых средств. 3 ил.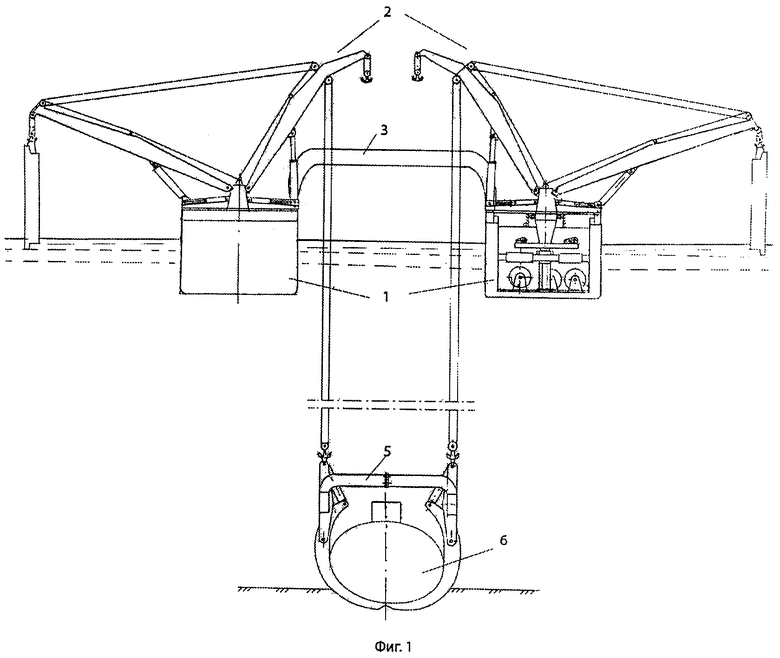
Способ подъема и транспортирования затонувших подводных лодок и других объектов с помощью плавучего подъемного средства с захватными устройствами, отличающийся тем, что процесс подъема и последующего транспортирования затонувшей подводной лодки осуществляется двумя плавучими самоходными подъемными средствами с грузоподъемными устройствами, оперативно прибывающими к месту катастрофы автономно и объединяемыми в единый судоподъемный комплекс-док, который осуществляет подъем затонувшей подводной лодки с различных, в том числе больших, глубин, без сложных подводных работ по ее застропке с помощью автоматического, дистанционно управляемого захватного устройства, навешиваемого на грузоподъемные устройства плавучих подъемных средств, охватывающего корпус поднимаемой подводной лодки без его обжатия, и последующее безопасное транспортирование затонувшей лодки после ее подъема в закрытом самоходном модульном комплексе-доке.
| КОМПЛЕКС ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ СУДОВ | 2000 |
|
RU2205769C2 |
| СУДНО ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ОБЪЕКТОВ | 2004 |
|
RU2284277C2 |
| ПЛАВУЧЕЕ ПОДЪЕМНОЕ СРЕДСТВО БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ | 2006 |
|
RU2320529C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 1992 |
|
RU2042569C1 |

