Изобретение относится к области морского оружия, а также может быть использовано в самодвижущихся подводных аппаратах.
Аналогом изобретения является система самонаведения (ССН) торпеды GB 1347462 A, F 42 В 19/00, 1974 г.
Антенное устройство ССН состоит из двух частей. Первая часть (14) состоит из восьми преобразователей, размещенных по периметру сечения торпеды плоскостью, перпендикулярной ее продольной оси. Каждый преобразователь имеет широкую диаграмму направленности в плоскости сечения, обеспечивающей обзор порядка 45 градусов и узкую в другой плоскости. Каждый из восьми преобразователей запитывается частотой, отличающейся от соседнего на 5 к Гц, общий диапазон 60-100 кГц, длительность зондирующего импульса 5 м/сек.
Вторая часть антенного устройства расположена в вертикальной плоскости носовой части обтекателя торпеды и состоит из двух преобразователей 59а, 59б, размещенных один над другим. Один имеет острую диаграмму направленности в горизонтальной плоскости, другой в вертикальной. При этом формируется «крест», в центр которого или его окрестности должен попасть эхо-сигнал при наведении торпеды.
Торпеда спускается на парашюте, может запускаться с водной поверхности. При движении вертикально вниз первым локатором осуществляется поиск сектора, в котором находится цель. Антенное устройство включается при этом на глубине 30 футов. После обнаружения сектора, в котором находится цель, вертикальная часть траектории торпеды заканчивается «каверной» и начинается наведение торпеды на цель с помощью траекторных методов. Сближение торпеды с целью осуществляется по кривой погони. Кроме того, система самонаведения реагирует только на цель, которая может оказаться ложной, при наличии средств противодействия, предпринимаемых противоборствующей стороной (антиторпеды, имитатора сигналов и т.д.).
Данная торпеда не может быть запущена с подводной лодки.
В режиме наведения ССН является одноплоскостной. При потере контакта с целью необходимо осуществить вторичный поиск, который также осуществляется с помощью траекторных эволюции. Взаимодействие обеих систем осуществляется логическим блоком 35.
Недостатки известного технического решения - относительно большое время поиска цели, большое время от выстрела до поражения цели.
Технический результат от использования изобретения - уменьшение времени поиска цели и сокращение времени от момента производства выстрела до поражения цели.
Технический результат достигается за счет того, что торпеда с многоканальной системой наведения, содержащая приемоизлучающую антенну, импульсный генератор ультразвуковых колебаний, приемные устройства, блок управления исполнительными цепями, снабжена 2n наборами биполярных электронных ключей, 2n сдвигающими регистрами, коммутатором режима, коммутатором тактовых импульсов на 2n выходов, коммутатором установочных комбинаций на 2n выходов, бортовым компьютером, в качестве приемоизлучающей антенны использована поверхностная акустическая антенна мозаичного типа, состоящая из однотипных антенных элементов, расположенных на поверхности обтекателя торпеды порядно в ортогональных направлениях, при этом все первые клеммы антенных элементов соединены первыми соединительными шинами, а вторые - со вторыми соединительными шинами, при этом входы n наборов электронных биполярных ключей соединены с первыми соединительными шинами, причем к каждой первой соединительной шине подключено по одному входу набора электронных биполярных ключей, другие n входов аналогичным образом подключены ко вторым соединительным шинам, выходы каждого из 2n наборов электронных биполярных ключей соединены в 2n общих точках, которые соединены с n выходами коммутатора тактовых импульсов и входами n приемных устройств по две точки на каждый вход, при этом управляющие клеммы 2n наборов биполярных электронных ключей подсоединены к выходам 2n сдвигающих регистров, по n на каждую группу набора электронных биполярных ключей, соответствующих первым и вторым соединительным шинам, 2n тактовых входа сдвигающих регистров подсоединены к 2n выходам коммутатора тактовых импульсов, 2n установочных входов сдвигающих регистров подсоединены к 2n выходам коммутатора установочных комбинаций, при этом выходы n приемных устройств соединены со входами бортового компьютера, а входы коммутаторов тактовых импульсов и установочных комбинаций соединены с выходами бортового компьютера, выходы бортового компьютера соединены также со входами блока управления исполнительными цепями и коммутатором режима, а входы бортового компьютера подсоединены к n приемным устройствам, где n - число каналов системы самонаведения.
Сущность предлагаемого изобретения поясняется фигурами 1-9, где
Фиг.1 - примерная схема расположения антенных элементов на корпусе обтекателя.
Фиг.2 - иллюстрация связи пространственной угловой координаты Θ с координатами границ парциального преобразователя на корпусе обтекателя Θм1, Θм2 в одной из плоскостей симметрии торпеды.
Фиг.3 - схема подключения подвижного парциального преобразователя к источникам возбуждения (к импульсному генератору ультразвуковых колебаний или входу приемного устройства).
Фиг.4 - два парциальных преобразователя, перекрывающих друг друга.
Фиг.5 - блок-схема формирования n парциальных преобразователей и подключения их в общую схему устройства. Каждый из n парциальных преобразователей имеет выходные клеммы аi, bi, на фигуре задействованы клеммы аi, для bi схема аналогична.
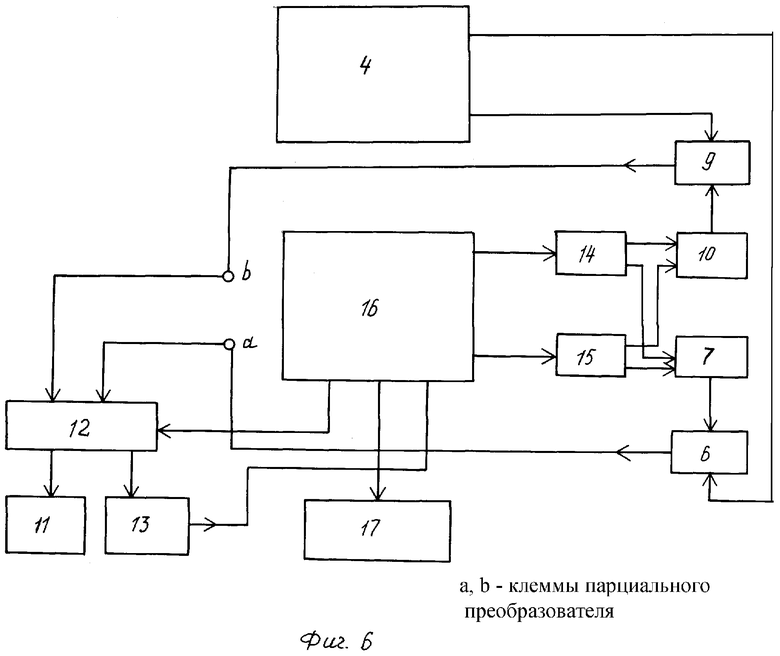
Фиг.6 - блок-схема формирования канала одного парциального преобразователя.
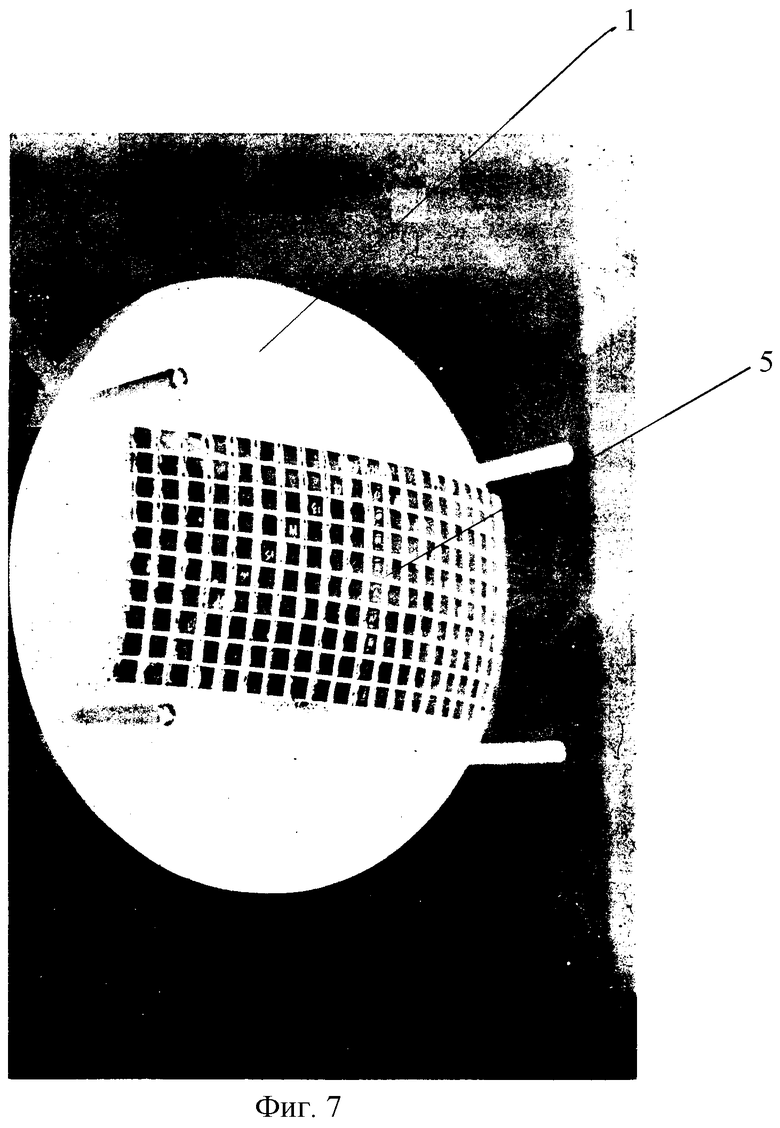
Фиг.7 - экспериментальный макет поверхностной акустической антенны на промежуточной стадии изготовления, на котором проводились исследования характеристик парциальных преобразователей.
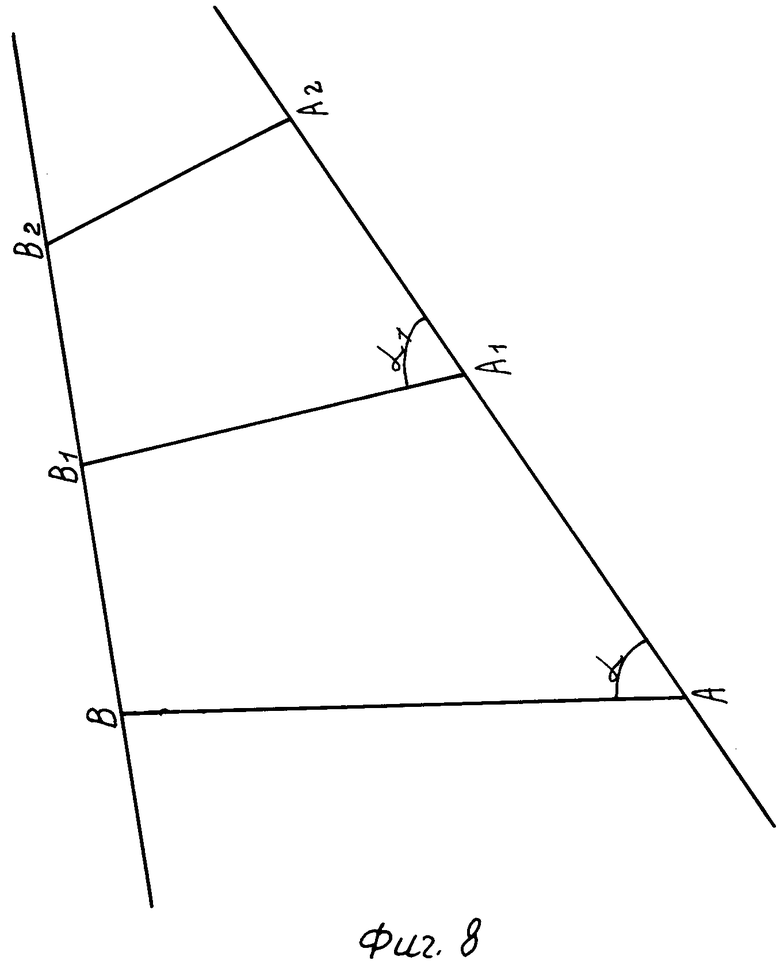
Фиг.8 - схема для вычисления скорости цели по взаимному положению цели и торпеды на основании данных, полученных системой самонаведения.
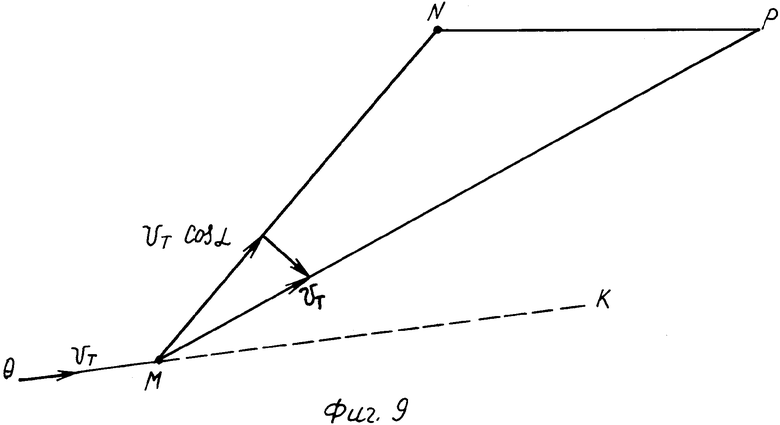
Фиг.9 - Упреждающий треугольник.
Где
1 Корпус обтекателя торпеды
2 Поверхностная акустическая антенна
3 Антенное поле поверхностной акустической антенны, на котором расположены антенные элементы по взаимно ортогональным первому и второму направлениям
4-1, 4-2, ..., 4n парциальных преобразователей
5 Первые соединительные шины
6-1, 6-2, 6-n n наборов первых биполярных электронных ключей
7-1, 7-2, 7-n n первых реверсивных сдвигающих регистров с тактовыми и установочными входами
8 Вторые соединительные шины
9-1, 9-2, 9-n n наборов вторых биполярных ключей
10-1, 10-2, 10-n n вторых реверсивных сдвигающих регистров с тактовыми и установочными входами
11 Импульсный генератор ультразвуковых колебаний
12 Коммутатор выходов парциальных преобразователей
13.1-13.2, ..., 13-n n приемных устройств
14 Коммутатор продвигающих тактовых импульсов
15 Коммутатор установочных комбинаций для формирования величины базы парциального преобразователя
16 Бортовой компьютер
17 Блок управления исполнительными цепями
Целью предлагаемого изобретения является отказ от траекторных методов поиска цели, функционирования ССН в условиях применения противоборствующей стороной средств противодействия, повышение производительности поиска, реализация в режиме наведения траектории параллельного сближения. Поставленная цель достигается тем, что торпеда с многоканальной системой наведения, содержащая приемоизлучающую антенну, импульсный генератор ультразвуковых колебаний, приемные устройства, блок управления исполнительными цепями, отличающаяся тем, что она снабжена 2n наборами биполярных электронных ключей, 2n сдвигающими регистрами, коммутатором режима, коммутатором тактовых импульсов на 2n выходов, коммутатором установочных комбинаций на 2n выходов, бортовым компьютером, в качестве приемоизлучающей антенны использована поверхностная акустическая антенна мозаичного типа, состоящая из однотипных антенных элементов, расположенных на поверхности обтекателя торпеды порядно в ортогональных направлениях, при этом все первые клеммы антенных элементов соединены первыми соединительными шинами, а вторые - вторыми соединительными шинами, при этом входы n наборов электронных биполярных ключей соединены с первыми соединительными шинами, причем к каждой первой соединительной шине подключено по одному входу набора электронных биполярных ключей, другие n входов аналогичным образом подключены ко вторым соединительным шинам, выходы каждого из 2n наборов электронных биполярных ключей соединены в 2n общих точках, которые соединены с n выходами коммутатора тактовых импульсов и входами n приемных устройств по две точки на каждый вход, при этом управляющие клеммы 2n наборов биполярных электронных ключей подсоединены к выходам 2n сдвигающих регистров по n на каждую группу набора электронных биполярных ключей, соответствующих первым и вторым соединительным шинам, 2n тактовых входа сдвигающих регистров подсоединены к 2n выходам коммутатора тактовых импульсов, 2n установочных входов сдвигающих регистров подсоединены к 2n выходам коммутатора установочных комбинаций, при этом выходы n приемных устройств соединены со входами бортового компьютера, а входы коммутаторов тактовых импульсов и установочных комбинаций соединены с выходами бортового компьютера, выходы бортового компьютера соединены также со входами блока управления исполнительными цепями и коммутатором режима, а входы бортового компьютера подсоединены к n приемным устройствам, где n - число каналов системы самонаведения. N парциальных преобразователей образуют n независимых идентичных каналов системы самонаведения торпеды. Каждый канал включает в себя первый набор n биполярных электронных ключей 6, второй набор биполярных электронных ключей 9, первый реверсивный сдвигающий регистр 7, второй реверсивный сдвигающий регистр 10, приемные устройства 13, импульсный генератор ультразвуковых колебаний 11, коммутатор выходов парциальных преобразователей 12, коммутатор тактовых импульсов 14, коммутатор установочных комбинаций 15, бортовой компьютер 16, причем позиции 11-16 являются общими для всех каналов
Предварительно все первые клеммы антенных элементов соединены первыми шинами 5 в первом направлении, а вторые - вторыми шинами 8 во втором направлении. Шины 5 подключены ко входам биполярных электронных ключей 6, а шины 8 - ко входам биполярных электронных ключей 9. Управляющие клеммы ключей 6, 9 подключены к выходам сдвигающих регистров 7 и 10 соответственно, а выходы соединены в общие точки а и b, которые являются клеммами подвижного парциального преобразователя. Клеммы а и b подсоединены к n входам коммутатора 12, который соединяет их либо со входами n приемных устройств 13, либо с выходом импульсного генератора ультразвуковых колебаний 11. Выходы приемных устройств 13 соединены со входами компьютера 16, а выходы компьютера 16 соединены с входами коммутаторов тактовых импульсов 14, коммутатора установочных комбинаций 15, коммутатора выходов парциальных преобразователей 12, при этом выходы коммутатора 14 соединены с тактовыми входами реверсивных сдвигающих регистров 7, а выходы коммутатора 15 - с установочными входами реверсивных сдвигающих регистров 7-10. Выходы с коммутатора 12 соединены с выходом импульсного генератора ультразвуковых колебаний, с выходами приемных устройств 13-1,...,13n.
Система самонаведения функционирует в двух режимах: 1 - поиска и обнаружения цели, задача которого - исследование полупространства и выявление в нем источников сигналов, в том числе и эхо-сигнала от цели, 2 - после обнаружения последнего - наведение на цель по упреждающей траектории.
Предварительная подготовка
1 - установка базы парциальных преобразователей путем записи на установочные входы первых 7-1, ..., 7-n и вторых 10-1,...,10n реверсивных сдвигающих регистров числовых комбинаций вида 11, 111, 1111.
Координаты Θм1, Θм2 парциального преобразователя на поверхности обтекателя 3 позволяют определить пространственную координату Θ в движущейся системе координат. Автором полученного аналитического выражения проверена экспериментально диаграмма направленности парциального преобразователя 4, расположенного на поверхности обтекателя 1. Для образующей уравнение имеет вид:

где r - радиус обтекателя,
λ -длинна волны.
Управление положением парциального преобразователя 4 на антенном поле 2 осуществляется с помощью двух первых сдвигающих регистров 7 и вторых 9 при подаче на их входы тактовых импульсов с одного из выходов бортового компьютера 16 через коммутаторы тактовых импульсов 14,15 (14-1,14-2, ..., 14-n; 15-1, 15-2, ..., 15-n). Их назначение - либо подавать на вход тактовые импульсы на сдвигающие регистры 7, 9 (7-1, 7-2, ..., 7-n; 10-1, 10-2, ..., 10-n), либо затормозить.
Предварительно в сдвигающие регистры 7, 9 записываются в установочные комбинации -11, 111, ..., поступающие с одного из выходов компьютера 16 на установочный вход регистров 7, 9. Эти установочные комбинации определяют размер базы парциального преобразователя 4 (4 -1, 4-2, ..., 4 -n). Выходные клеммы сдвигающих регистров 7, 9 подключены к управляющим клеммам управляющих ключей 6 (6-1, 6-2, ..., 6-n) и 9 (9-1, 9-2, ..., 9-n), к входным клеммам которых уже подсоединены соответственно соединительные шины 5, 8, а выходы электронных ключей соединены в свои общие точки - клеммы а (а1, а2, ..., an) и b (b1, b2, ..., bn), которые подсоединены к выходам коммутатора режима 12 (излучение и прием ультразвуковых колебаний) и ко входам n приемных устройств 13 (13-1, 13-2, ..., 13-n).
Входом коммутатора 12 является выход генератора импульсов ультразвуковых колебаний 11. Коммутатор управляется бортовым компьютером 16 (выход g). Задача приемных устройств 13 (13-1, 13-2, ..., 13-n) - классификация принятых сигналов по совокупности признаков, к которым следует отнести статистические характеристики, наличие доплеровской составляющей, протяженность во времени, форма огибающей и т.д., источником которого может быть истинная цель, различные помехи, антиторпеды. Наиболее полным набором признаков обладает сигнал от истинной цели. С выхода приемных устройств 13 (13-1, 13-2, ..., 13-n) сигналы поступают на вход бортового компьютера 16, запоминаются и анализируются, после чего они поступают на управление устройством формирования диаграммы направленности парциальных преобразователей 4 в блок управления исполнительными цепями 17.
При перемещении парциальных преобразователей 4 по антенному полю 2 возможно их взаимное перекрытие, что иллюстрирует фигура 4, где парциальный преобразователь 4 -1 состоит из антенных элементов:
а парциальный преобразователь 4-2:

Обозначим открытые ключи из набора ключей 6-1, 9-1 наклонной штриховкой, а открытые ключи 6-2, 9-2 горизонтальной. Пусть каждый преобразователь 4-1, 4-2 представляет собой источник напряжения, который создает токи, протекающие через ключи 6-1, 9-1, 6-2, 9-2. Как видно из фигуры 4, наличие отдельных наборов ключей 6-1, 6-2 и 9-1, 9-2 обеспечивают развязку парциальных преобразователей 4-1, 4-2.
Рассмотрим работу торпеды в режиме поиска и наведения. Исходные условия: в момент выстрела: координаты цели известны и торпеда направляется в окрестности точки пространства, соответствующей настоящему месту. После прохождения участка траектории на предохранителе включается устройство самонаведения торпеды и начинается поиск цели. Полагаем, что противоборствующей стороной применяется средство различного рода помех, которые имеют различное пространственное положение и могут воздействовать на акустическую антенну 2. Пусть число таких источников будет n.
Предлагаемая система наведения с помощью n каналов обнаруживает источник этих сигналов путем захвата их диаграммой направленности соответствующего канала. Через некоторое время этот процесс заканчивается и парциальные преобразователи 4-1, 4-2, 4-n содержат в своих зонах диаграммы направленности каждый из этих сигналов, корректируя положение парциальных преобразователей 4-1, 4-2, 4-n на антенном поле 2, таким образом производится самонастройка системы самонаведения к окружающей тактической обстановке, что дает возможность одновременной обработки информации, принятой всеми n каналами одновременно. Движение торпеды при этом происходит по прямолинейной траектории.
Это позволяет с высокой вероятностью выделить сигнал соответствующей цели за более короткое время и, продолжая режим поиска для уточнения информации, осуществлять подготовку торпеды к режиму наведения. Для этого необходимо определить скорость цели, положение отрезка ее траектории в данный момент и расстояние от торпеды до цели. При этом может возникнуть ситуация, изображенная на фигуре 8.Следует отметить необходимость наблюдения за обнаруженными источниками сигналов в течение всего времени функционирования ССН, т.к. среди них может оказаться антиторпеда.
Пусть линия ц - элемент траектории цели, а под ним т - элемент траектории торпеды. Полагаем движение обоих объектов равномерным. Разобьем обе линии на равные отрезки, соответствующие интервалу зондирования.
Решая треугольники AA1B и AB1B, оценим скорость цели. Точка В соответствует настоящему шагу зондирования, точка А предшествующему. Произведя несколько наблюдений и выполнив соответствующий объем вычислений, получаем угол между элементом траектории торпеды и траекторией цели. Проведем эти вычисления.
АА2 - элемент траектории торпеды;
ВВ2 - элемент траектории цели;
В - положение цели при j-м зондировании;
A1 - положение торпеды при (j+1) зондировании;
B1 - положение цели при (j+1) зондировании;
 - пеленг на цель при j-м зондировании;
- пеленг на цель при j-м зондировании;
 1- пеленг на цель при (j +1) зондировании.
1- пеленг на цель при (j +1) зондировании.
Величины AA1; AB; A1B1; 1 изменяются системой самонаведения торпеды. Для определения скорости цели необходимо определить отрезок BB1.



Определяем отрезок ВВ1.

Скорость цели

где Δt - время между j и (j+1) зондирующими посылками.
Переходим к анализу треугольника упреждения MNP, где:
М точка поворота торпеды; м
N положение цели в момент поворота;
Р - точка упреждения;
Угол NMP - угол упреждения.
Стороны треугольника упреждения. Приход торпеды в точку Р произойдет за время Т.
MT=T*VT*Cos∠MPQ
NP=T*VЦ
МР=Т*VТ
Решая треугольник MNP, находим угол упреждения NMP и сравниваем его величину с углом, который отработала торпеда. В дальнейшем торпеда наводится на цель, поддерживая акустический контакт системы самонаведения с целью с помощью парциального преобразователя 4, положение которого на антенном поле 2 соответствует отработанному углу упреждения как в горизонтальной плоскости, так и в плоскости угла места до осуществления механического контакта торпеды с целью.
Достигаемые эффекты.
1. Повышение КПД процесса поиска и наведения торпеды.
2. За счет отказа от траекторных методов имеет место сокращение времени от выстрела до поражения цели.
3. Угол обзора на прямом курсе хода торпеды составляет угол 150-160 градусов по горизонтали и ±30° по вертикали.
4. Большая вероятность механического контакта торпеды с целью, что увеличивает эффективность взрывчатого вещества.
5. Введение предложенной системы самонаведения не требует конструктивных изменений в существующих образцах и ограничивается простой заменой предыдущей системы на предлагаемую.
6. Возможность стрельбы торпедой с АПЛ, находящейся на глубине, по надводным целям.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ СОПРОВОЖДЕНИЯ ВОДОЛАЗА | 2017 |
|
RU2672505C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2001 |
|
RU2195774C2 |
| ПЕРЕГОВОРНОЕ УСТРОЙСТВО НА БАЗЕ ТВЁРДОТЕЛЬНОГО ЛАЗЕРА С НАКАЧКОЙ ЛАЗЕРНЫМ ДИОДОМ | 2016 |
|
RU2668359C1 |
| ПЕРЕГОВОРНОЕ УСТРОЙСТВО НА БАЗЕ ЛАЗЕРНОГО ДИОДА | 2016 |
|
RU2637178C1 |
| ПОВОРОТНАЯ УСТАНОВКА | 2004 |
|
RU2267749C1 |
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2003 |
|
RU2263401C2 |
| АВТОНОМНЫЙ ПУНКТ ПРИЕМА ГЕЛИОГЕОФИЗИЧЕСКОЙ ИНФОРМАЦИИ | 2012 |
|
RU2510934C1 |
| Устройство межстанционной связи | 1989 |
|
SU1732489A1 |
| Устройство для регистрации сейсмической информации в цифровом виде на акваториях | 1986 |
|
SU1385113A1 |




Изобретение относится к области морского оружия и может быть использовано в самодвижущихся подводных аппаратах. Технический результат - уменьшение времени поиска цели и сокращение времени от момента производства выстрела до поражения цели. Ведение морского боя между АПЛ представляет между собой сложную тактическую задачу, особенно при широком использовании средств противодействия. В этих условиях актуальной задачей становится принятие правильного решения системой самонаведения торпеды за очень короткий интервал, для чего требуется обработка большого количества текущей информации. Предлагаемая торпеда с многоканальной системой самонаведения позволяет разделить источники сигналов в пространстве и произвести их одновременную обработку, а также заменить траекторные методы поиска цели и наведения на нее угловым перемещением акустических лучей в пространстве. При этом торпеда совершает только прямолинейные перемещения. 9 ил.
Торпеда с многоканальной системой наведения, содержащая приемо-излучающую антенну, импульсный генератор ультразвуковых колебаний, приемные устройства, блок управления исполнительными цепями, отличающаяся тем, что она снабжена 2n наборами биполярных электронных ключей, 2n сдвигающими регистрами, коммутатором режима, коммутатором тактовых импульсов на 2n выходов, коммутатором установочных комбинаций на 2n выходов, бортовым компьютером, в качестве приемо-излучающей антенны использована поверхностная акустическая антенна мозаичного типа, состоящая из однотипных антенных элементов, расположенных на поверхности обтекателя торпеды порядно в ортогональных направлениях, при этом все первые клеммы антенных элементов соединены первыми соединительными шинами, а вторые - вторыми соединительными шинами, при этом входы n наборов электронных биполярных ключей соединены с первыми соединительными шинами, причем к каждой первой соединительной шине подключено по одному входу набора электронных биполярных ключей, другие n входов аналогичным образом подключены ко вторым соединительным шинам, выходы каждого из 2n наборов электронных биполярных ключей соединены в 2n общих точках, которые соединены с n выходами коммутатора тактовых импульсов и входами n приемных устройств по две точки на каждый вход, при этом управляющие клеммы 2n наборов биполярных электронных ключей подсоединены к выходам 2n сдвигающих регистров по n на каждую группу набора электронных биполярных ключей, соответствующих первым и вторым соединительным шинам, 2n тактовых входа сдвигающих регистров подсоединены к 2n выходам коммутатора тактовых импульсов, 2n установочных входов сдвигающих регистров подсоединены к 2n выходам коммутатора установочных комбинаций, при этом выходы n приемных устройств соединены со входами бортового компьютера, а входы коммутаторов тактовых импульсов и установочных комбинаций соединены с выходами бортового компьютера, выходы бортового компьютера соединены также со входами блока управления исполнительными цепями и коммутатором режима, а входы бортового компьютера подсоединены к n приемным устройствам, где n - число каналов системы самонаведения.
| GB 1347462 А, 20.02.1974 | |||
| US 3760755 A, 25.09.1973 | |||
| Тормозное устройство к гидроцилиндру | 1972 |
|
SU449185A1 |
| US 3738270 А, 12.06.1973. | |||

