Изобретение относится к области судостроения, в частности к средствам управления движением беспилотных дистанционно или автоматически управляемых подводных аппаратов (дронов), функционирующих совместно с аквалангистами или водолазами.
Известно «Устройство для управления подводным аппаратом» (Патент RU 2176967, МПК B63G 8/16, опубл. 20.12.2001), которое содержит движитель вертикального перемещения, движитель горизонтального перемещения, поворотную телекамеру, датчик угла поворота телекамеры, первый пороговый элемент, сумматор, источник постоянного сигнала, синусный функциональный преобразователь, косинусный функциональный преобразователь, второй пороговый элемент, третий пороговый элемент, датчик команд, первый блок умножения, второй блок умножения, логический элемент НЕ, логический элемент ИЛИ, первый ключ, второй ключ, первый усилитель, второй усилитель, блок взятия модуля, объект обнаружения, причем движители вертикального и горизонтального перемещения подключены соответственно к выходам первого и второго усилителей, поворотная телекамера кинематически связана с датчиком угла поворота телекамеры, выход которого через последовательно соединенные синусный функциональный преобразователь, первый блок умножения и первый ключ подключен к входу первого усилителя и через последовательно соединенные косинусный функциональный преобразователь, второй блок умножения и второй ключ подключен к входу второго усилителя, к первому входу сумматора присоединен источник постоянного сигнала, а выход сумматора через последовательно соединенные второй пороговый элемент и логический элемент НЕ подключен к первому, а через третий пороговый элемент - к второму входу логического элемента ИЛИ, выход которого связан с управляющим входом второго ключа, выход датчика команд подключен к вторым входам блоков умножения и, вход блока взятия модуля соединен с выходом датчика угла, а его выход - со вторым входом сумматора и через первый пороговый элемент - с управляющим входом первого ключа.
Данное устройство предназначено для ручного дистанционного управления подводным аппаратом и не обеспечивает автоматического сопровождения подводным аппаратом водолаза в процессе его перемещения в водной среде и подводного динамического позиционирования в близости от водолаза в процессе его контактного взаимодействия с аппаратом, например с целью замены дыхательного аппарата или погрузки донных образцов.
Известно устройство «Торпеда с многоканальной системой самонаведения» (Патент RU 2262067, МПК F42B 19/00, опубл. 10.10.2005), содержащее приемо-излучающую антенну, импульсный генератор ультразвуковых колебаний, приемные устройства, блок управления исполнительными цепями, отличающаяся тем, что она снабжена 2n наборами биполярных электронных ключей, 2n сдвигающими регистрами, коммутатором режима, коммутатором тактовых импульсов на 2n выходов, коммутатором установочных комбинаций на 2n выходов, бортовым компьютером, в качестве приемо-излучающей антенны использована поверхностная акустическая антенна мозаичного типа, состоящая из однотипных антенных элементов, расположенных на поверхности обтекателя торпеды порядно в ортогональных направлениях, при этом все первые клеммы антенных элементов соединены первыми соединительными шинами, а вторые - вторыми соединительными шинами, при этом входы n наборов электронных биполярных ключей соединены с первыми соединительными шинами, причем к каждой первой соединительной шине подключено по одному входу набора электронных биполярных ключей, другие n входов аналогичным образом подключены ко вторым соединительным шинам, выходы каждого из 2п наборов электронных биполярных ключей соединены в 2п общих точках, которые соединены с n выходами коммутатора тактовых импульсов и входами n приемных устройств по две точки на каждый вход, при этом управляющие клеммы 2n наборов биполярных электронных ключей подсоединены к выходам 2n сдвигающих регистров по n на каждую группу набора электронных биполярных ключей, соответствующих первым и вторым соединительным шинам, 2n тактовых входа сдвигающих регистров подсоединены к 2n выходам коммутатора тактовых импульсов, 2n установочных входов сдвигающих регистров подсоединены к 2n выходам коммутатора установочных комбинаций, при этом выходы n приемных устройств соединены со входами бортового компьютера, а входы коммутаторов тактовых импульсов и установочных комбинаций соединены с выходами бортового компьютера, выходы бортового компьютера соединены также со входами блока управления исполнительными цепями и коммутатором режима, а входы бортового компьютера подсоединены к n приемным устройствам, где n - число каналов системы самонаведения.
Данное устройство не обеспечивает сопровождение подводным аппаратом (торпедой) водолаза при его перемещениях в водной среде, поскольку он не создает характерные для судов акустические, электромагнитные, магнитные поля и не оставляет мощный кавитационный след. Кроме того, устройство не обеспечивает динамического позиционирования подводного аппарата вблизи водолаза в процессе его контактного взаимодействия с аппаратом, например с целью замены дыхательного аппарата или замены инструмента.
Известно устройство «Транспортировщик водолазов» (Патент RU 2458816, МПК В63С 11/46, опубл. 20.08.2012). Транспортировщик водолазов имеет торпедообразную форму и включает систему вывески и дифферентовки, движительно-двигательный комплекс в виде двух винторулевых колонок левого и правого бортов, убирающихся в нишу легкого корпуса при повороте вокруг вертикальной оси, приборный отсек с пультом управления, энергетическую аккумуляторную установку и прочный грузовой отсек. Между гидроакустичекими антеннами и движительно-двигательным комплексом расположена носовая дифферентно-уравнительная цистерна. Кормовая дифферентно-уравнительная цистерна размещена в кольцевом зазоре между корпусом и грузовым отсеком транспортировщика, что позволяет производить загрузку грузового отсека через заднюю крышку. В кормовом обтекателе размещены якорящее устройство гарпунного типа и дополнительный баллон с воздухом высокого давления.
Ручное управление транспортировщиком занимает внимание и руки водолаза, что серьезно мешает ему в поисковых работах и в действиях с использованием оружия. Применение для позиционирования транспортировщика якорного устройства гарпунного типа ориентировано только на придонную его фиксацию по вертикали, что ограничивает использование транспортировщика в качестве мобильной базы при работах на крупногабаритных объектах, например затонувших судах или нефтедобывающих платформах. Использование неизвлекаемого якоря ограничивает число рабочих площадок водолаза за один сеанс погружения. Одновременное использование одного якоря приводит к сносу и кручению транспортировщика подводными течениями, что чревато его столкновениями с подводными объектами.
Известна «Система динамического позиционирования судном» (Патент SU 1615678 А1, МПК G05D 1/00, опубл. 23.12.1990. Бюл. №47), содержащая датчик скорости движения судна, датчик рассогласования угла по курсу (по положению судна в продольном направлении), акселерометр, первый сумматор, подключенный выходом к входу исполнительного органа главных движителей судна, блок умножения, подключенный входами к выходам соответственно датчика угловой скорости судна и датчика поперечной линейной скорости, а выходом- к первому входу первого сумматора, задатчик продольной линейной скорости судна, амплитудные ограничители, второй сумматор и блок коррекции коэффициента передачи в канале движителей, первый и второй входы которого подключены к выходам соответственно акселерометра и датчика угла рассогласования по курсу, третий вход - к выходу первого сумматора, а выход - к второму входу первого сумматора, соединенного третьим входом с выходом второго сумматора, а четвертым входом - с выходом задатчика линейной продольной скорости судна, причем выход акселерометра и выход датчика скорости движения судна через соответствующие амплитудные ограничители подключены к входам второго сумматора.
Данная система принимается за прототип заявляемого изобретения. Система-прототип не обеспечивает автоматическое сопровождение подводным аппаратом водолаза в процессе его перемещения в водной среде и не обеспечивает динамическое позиционирование подводного аппарата по глубине.
Задачей изобретения является создание устройства, расширяющего функциональные возможности подводного дрона с нейтральной плавучестью и наличием движителей с тягой по горизонтали в продольном, поперечном и вращательном направлениях, а также по вертикали посредством добавления функций автоматического сопровождения водолаза при его перемещениях и динамического позиционирования по глубине при контактном взаимодействии водолаза с дроном.
Техническим результатом изобретения является повышение производительности, безопасности и визуальной скрытности труда водолаза в процессе выполнения подводных работ.
Технический результат достигается за счет того, что в систему автоматического управления дроном сопровождения водолаза, содержащую на борту дрона первый сумматор, а также первый умножитель, своим выходом связанный с первым входом второго сумматора, дополнительно введены в составе оборудования водолаза: первый гидрофон, первый ждущий мультивибратор, первый логический элемент ИЛИ, первый счетчик, индикатор, датчик команд, второй ждущий мультивибратор, первый акустический излучатель, первый генератор импульсов, причем выход первого гидрофона связан с первым входом первого ждущего мультивибратора, первым входом первого счетчика и первым входом второго ждущего мультивибратора, выход датчика команд соединен со вторым входом первого ждущего мультивибратора и вторым входом второго ждущего мультивибратора, выходы которых связаны соответственно с первым и вторым входами первого логического элемента ИЛИ, выход которого подключен к входу первого акустического излучателя, выход первого генератора импульсов соединен со вторым входом первого счетчика, выход которого подключен ко входу индикатора,
причем первый гидрофон и первый акустический излучатель размещают преимущественно с задней стороны водолаза,
в составе оборудования дрона дополнительно введены: второй акустический излучатель, второй генератор импульсов, второй счетчик, первый RS-триггер, третий ждущий мультивибратор, логический элемент И, D-триггер, второй логический элемент ИЛИ, контроллер маршевого движения, первый многоканальный мультиплексор, первый регистр, сервопривод рулевого движителя, второй многоканальный мультиплексор, второй регистр, сервопривод движителя глубины, контроллер динамического позиционирования, третий многоканальный мультиплексор, третий регистр, сервопривод маршевого движителя, датчик векторного нуля, четвертый многоканальный мультиплексор, четвертый регистр, сервопривод поперечного движителя,
причем выход второго генератора импульсов связан с входом второго акустического излучателя, первым входом второго счетчика, первым входом контроллера маршевого движения, а также первыми входами первого, второго, третьего и четвертого регистров, выход второго счетчика соединен с первым входом первого RS-триггера, выход которого соединен с первым входом второго логического элемента ИЛИ и первым входом контроллера динамического позиционирования, выход третьего ждущего мультивиратора связан с первым входом логического элемента И, выход которого подключен к первому входу D-триггера, первый выход контроллера маршевого движения связан с входом третьего ждущего мультивибратора, вторым входом логического элемента И, вторым входом второго счетчика, и вторыми входами первого RS-триггера и D-триггера, выход D-триггера связан со вторым входом второго логического элемента ИЛИ и первыми входами сервопривода рулевого движителя, сервопривода движителя глубины, сервопривода маршевого движителя, сервопривода поперечного движителя, выход второго логического элемента ИЛИ соединен с первыми входами первого, второго, третьего, четвертого многоканальных мультиплексоров, а также вторым входом контроллера динамического позиционирования, второй выход контроллера маршевого движения соединен со вторым входом первого многоканального мультиплексора, третий вход которого подключен к первому выходу контроллера динамического позиционирования, третий выход контроллера маршевого движения связан со вторым входом второго многоканального мультиплексора, третий вход которого подключен ко второму выходу контроллера динамического позиционирования, четвертый выход контроллера маршевого движения связан со вторым входом третьего многоканального мультиплексора, третий вход которого соединен с третьим выходом контроллера динамического рассогласования, четвертый выход которого связан со вторым входом четвертого многоканального мультиплексора, третий вход которого соединен с выходом датчика векторного нуля, выходы первого, второго, третьего и четвертого многоканальных мультиплексоров связаны соответственно со вторыми входами первого, второго, третьего и четвертого регистров, выходы которых связаны соответственно со вторыми входами сервопривода рулевого движителя, сервопривода движителя глубины, сервопривода маршевого движителя, сервопривода поперечного движителя, причем контроллер маршевого движения включает в себя следующие дополнительные блоки: второй гидрофон, второй RS-триггер, третий счетчик, третий генератор импульсов, третий гидрофон, третий RS-триггер, четвертый счетчик, первый вычитатель, четвертый гидрофон, четвертый RS-триггер, пятый счетчик, второй вычитатель, пятый гидрофон, пятый RS-триггер, шестой счетчик, датчик установочного расстояния, третий вычитатель,
и следующие связи: выход второго гидрофона связан с первым входом второго RS-триггера и представляет первый выход контроллера маршевого движения, его второй выход представляет выход первого вычитателя, его третий выход представляет выход второго вычитателя, его четвертый выход представляет выход третьего вычитателя, вход контроллера маршевого движения представлен связанными вместе вторым входом второго RS-триггера и первыми входами третьего, четвертого, пятого RS-триггеров, выход второго RS-триггера соединен с первым входом третьего счетчика, выход третьего генератора импульсов связан со вторым входом третьего счетчика и первыми входами четвертого, пятого, шестого счетчиков, выход третьего счетчика связан с первым входом первого вычитателя, выход третьего гидрофона соединен со вторым входом третьего RS-триггера, выход которого связан со вторым входом четвертого счетчика, выход четвертого счетчика связан со вторым входом первого вычитателя, выход четвертого гидрофона связан со вторым входом четвертого RS-триггера, выход которого соединен со вторым входом пятого счетчика, выход пятого счетчика связан с первыми входами второго вычитателя и первого сумматора, выход пятого гидрофона подключен ко второму входу пятого RS-триггера, выход которого соединен со вторым входом шестого счетчика, выход которого связан со вторыми входами второго вычитателя и первого сумматора, выход первого сумматора соединен с первым входом третьего вычитателя, ко второму входу которого подсоединен выход датчика установочного расстояния, причем контроллер динамического позиционирования включает в себя следующие дополнительные блоки: инерциальный навигационный модуль, пятый регистр, датчик текущего курса, синусный функциональный преобразователь, косинусный функциональный преобразователь, второй умножитель, шестой регистр, четвертый вычитатель, третий умножитель, четвертый умножитель, пятый вычитатель, шестой вычитатель, седьмой вычитатель, восьмой вычитатель, пятый многоканальный мультиплексор,
и следующие связи: первый вход контроллера динамического позиционирования представлен первым входом пятого многоканального мультиплексора, его второй вход представлен первым входом шестого регистра, первый выход контроллера динамического позиционирования представлен выходом пятого вычитателя, его второй выход представлен выходом пятого мультиплексора, его третий выход представлен выходом седьмого вычитателя, наконец, его четвертый выход представлен выходом восьмого вычитателя, первый и второй выходы инерциального навигационного модуля связаны соответственно с первым и вторым входами пятого регистра, первый выход пятого регистра связан с первыми входами первого и третьего умножителей, второй выход пятого регистра связан с первыми входами второго и четвертого умножителей, третий выход пятого регистра связан со вторым входом шестого регистра, первым входом шестого вычитателя и вторым входом пятого многоканального мультиплексора, выход датчика текущего курса соединен со входами синусного и косинусного функциональных преобразователей, третьим входом шестого регистра и первым входом пятого вычитателя, выход синусного функционального преобразователя соединен со вторыми входами второго и третьего умножителей, выход косинусного функционального преобразователя связан со вторыми входами первого и четвертого умножителей, второй вход второго сумматора связан с выходом второго умножителя, выход второго сумматора связан с четвертым входом шестого регистра и первым входом восьмого вычитателя, выход третьего умножителя связан с первым входом четвертого вычитателя, второй вход которого соединен с выходом четвертого умножителя, выход четвертого вычитателя связан с пятым входом шестого регистра, первый, второй, третий, четвертый выходы шестого регистра связаны со вторыми входами соответственно пятого, шестого, седьмого, восьмого вычитателей, выход шестого вычитателя соединен с третьим входом пятого многоканального мультиплексора,
причем второй акустический излучатель, второй, третий, четвертый и пятый гидрофоны размещают непосредственно на корпусе дрона или на кронштейнах в плоскости его фронтальной части, при этом второй и третий гидрофоны размещают в горизонтальной диаметральной плоскости дрона симметрично относительно его вертикальной диаметральной плоскости с максимально возможным их разнесением, а четвертый и пятый гидрофоны размещают в вертикальной диаметральной плоскости дрона симметрично относительно его горизонтальной диаметральной плоскости с максимально возможным их разнесением.
Технический результат в части повышения производительности и безопасности труда водолаза обеспечивается за счет использования дрона в качестве близкодоступной мобильной базы для хранения инструментов, дыхательных средств, деталей, собираемых образцов. Повышение безопасности труда водолаза обеспечивается за счет использования близкодоступного дрона в качестве укрытия, например от хищных рыб или вражеских пловцов, а также за счет освобождения внимания и рук водолаза от управления дроном, например для выполнения поисковых работ и владения оружием. Повышение визуальной скрытности труда водолаза обеспечивается за счет удаления судна-носителя дрона и водолаза из зоны проведения подводных работ и скрытного их подводного перемещения в указанную зону.
Изобретение удовлетворяет критерию патентной новизны, поскольку устройство в приведенной конфигурации ранее не было известно и только введение указанных новых блоков и связей обеспечивает заявленное расширение функциональных возможностей подводного дрона.
Заявляемое изобретение поясняется следующими чертежами:
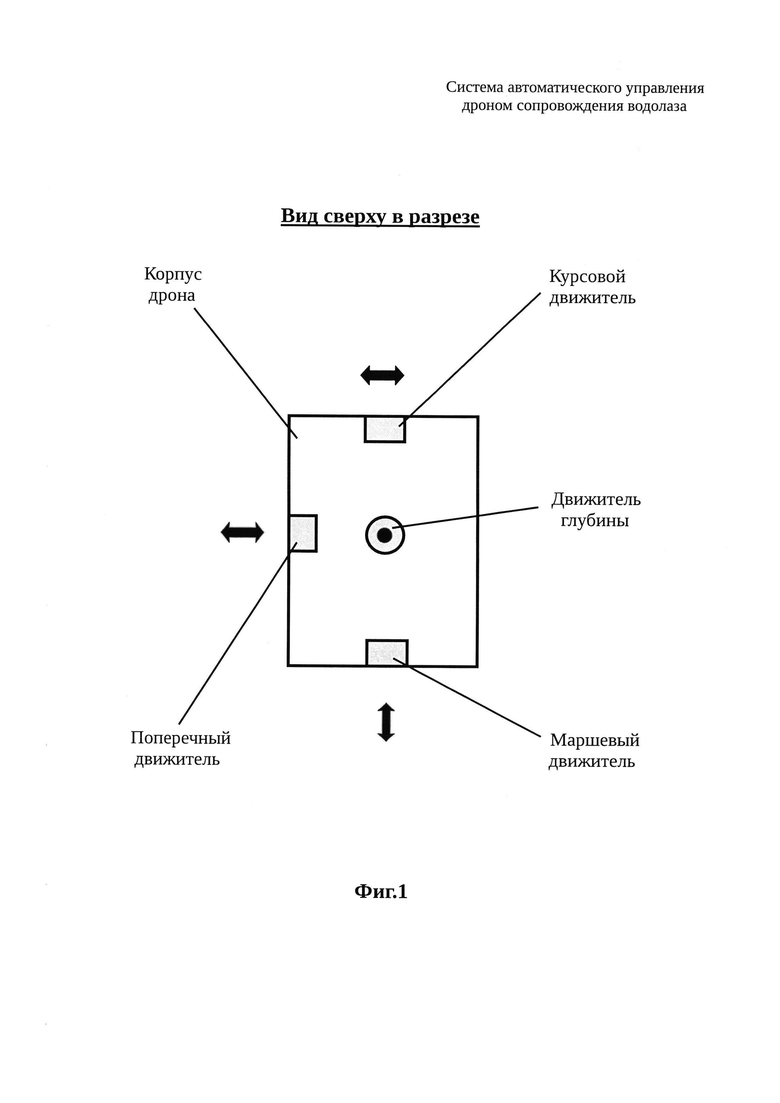
Фиг. 1 Направления тяги движителей дрона.
Фиг. 2 Сенсорное оборудование водолаза и дрона.
Фиг. 3 Функциональная схема системы.
Фиг. 4 Контроллер маршевого движения.
Фиг. 5 Контроллер локального позиционирования.
Фиг. 6 Принципы формирования входных сигналов сервоприводов.
Система состоит из взаимодействующих между собой устройства целеуказания
водолаза и устройства управления дрона (фиг. 3)
Устройство целеуказания относится к оборудованию водолаза и включает в себя следующие блоки:
1 - первый гидрофон,
2 - первый ждущий мультивибратор,
3 - первый логический элемент ИЛИ,
4 - первый счетчик,
5 - индикатор,
6 - датчик команд,
7 - второй ждущий мультивибратор,
8 - первый акустический излучатель,
9 - первый генератор импульсов,
причем выход первого гидрофона 1 связан с первым входом (пуска) первого ждущего мультивибратора 2, первым входом (сброса) первого счетчика 4 и первым входом (пуска) второго ждущего мультивибратора 7, выход датчика команд 6 соединен со вторым входом (запрета) первого ждущего мультивибратора 2 и вторым входом (разрешения) второго ждущего мультивибратора 7, (прямые) выходы которых связаны соответственно с первым и вторым входами первого логического элемента ИЛИ 3, выход которого подключен к входу (включения) первого акустического излучателя 8, выход первого генератора импульсов 9 соединен со вторым (счетным) входом первого счетчика 4, выход (переполнения) которого подключен ко входу индикатора 5, причем первый гидрофон 1 и первый акустический излучатель 8 размещают преимущественно с задней стороны водолаза.
Устройство управления дрона размещается на его борту и включает в себя следующие блоки:
10 - второй акустический излучатель,
11 - второй генератор импульсов,
12 - второй счетчик,
13 - первый RS-триггер,
14 - третий ждущий мультивибратор,
15 - логический элемент И,
16 - D-триггер,
17 - логический элемент ИЛИ,
18 - контроллер маршевого движения,
19 - первый многоканальный мультиплексор,
20 - первый регистр,
21 - сервопривод рулевого движителя,
22 - второй многоканальный мультиплексор,
23 - второй регистр,
24 - сервопривод движителя глубины,
25 - контроллер динамического позиционирования,
26 - третий многоканальный мультиплексор,
27 - третий регистр,
28 - сервопривод маршевого движителя,
29 - датчик векторного нуля,
30 - четвертый многоканальный мультиплексор,
31 - четвертый регистр,
32 - сервопривод поперечного движителя,
причем выход второго генератора импульсов 11 связан с входом (включения) второго акустического излучателя 10, первым (счетным) входом второго счетчика 12, первым входом (синхронизации) контроллера маршевого движения 18, а также первыми входами (записи) первого 20, второго 23, третьего 27 и четвертого 31 регистров, выход (переполнения) второго счетчика 12 соединен с первым (S) входом первого RS-триггера 13, (прямой) выход которого соединен с первым входом второго логического элемента ИЛИ 17 и первым входом (признака потери связи) контроллера динамического позиционирования 25, (инверсный) выход третьего ждущего мультивиратора 14 связан с первым входом логического элемента 15, выход которого подключен к первому (D) входу D-триггера 16, первый выход (признака ответа водолаза) контроллера маршевого движения 18 связан с входом (пуска) третьего ждущего мультивибратора 14, вторым входом логического элемента И 15, вторым входом (сброса) второго счетчика 12, вторым (R) входом первого RS-триггера 13 и вторым входом (записи) D-триггера 16, (прямой) выход D-триггера 16 связан со вторым входом второго логического элемента ИЛИ 17 и первыми входами (управления коэффициентом передачи) сервопривода рулевого движителя 21, сервопривода движителя глубины 24, сервопривода маршевого движителя 28, сервопривода поперечного движителя 32, выход второго логического элемента ИЛИ 17 соединен с первыми (управляющими) входами первого 19, второго 22, третьего 26, четвертого 30 многоканальных мультиплексоров, а также вторым входом (включения режима динамического позиционирования) контроллера динамического позиционирования 25, второй выход (рассогласования по курсу) контроллера маршевого движения 18 соединен со вторым (информационным) входом первого многоканального мультиплексора 19, третий (информационный) вход которого подключен к первому выходу (рассогласования по курсу) контроллера динамического позиционирования 25, третий выход (рассогласования по глубине) контроллера маршевого движения 18 связан со вторым (информационным) входом второго многоканального мультиплексора 22, третий (информационный) вход которого подключен ко второму выходу (рассогласования по глубине) контроллера динамического позиционирования 25, четвертый выход (маршевого рассогласования) контроллера маршевого движения 18 связан со вторым- (информационным) входом третьего многоканального мультиплексора 26, третий (информационный) вход которого соединен с третьим выходом (маршевого рассогласования) контроллера динамического рассогласования 25, четвертый выход (поперечного рассогласования) которого связан со вторым (информационным) входом четвертого многоканального мультиплексора 30, третий (информационный) вход которого соединен с выходом датчика векторного нуля 29, выходы первого 19, второго 22, третьего 26 и четвертого 30 многоканальных мультиплексоров связаны соответственно со вторыми (информационными) входами первого 20, второго 23, третьего 26 и четвертого 31 регистров, выходы которых связаны соответственно со вторыми (информационными) входами сервопривода рулевого движителя 21, сервопривода движителя глубины 24, сервопривода маршевого движителя 28, сервопривода поперечного движителя 32.
Контроллер маршевого движения 18 (фиг. 4) включает в себя следующие блоки:
33 - второй гидрофон,
34 - второй RS-триггер,
35 - третий счетчик,
36 - третий генератор импульсов,
37 - третий гидрофон,
38 - третий RS-триггер,
39 - четвертый счетчик,
40 - первый вычитатель,
41 - четвертый гидрофон,
42 - четвертый RS-триггер,
43 - пятый счетчик,
44 - второй вычитатель,
45 - пятый гидрофон,
46 - пятый RS-триггер,
47 - шестой счетчик,
48 - датчик установочного расстояния,
49 - третий вычитатель,
50 - первый сумматор,
причем выход второго гидрофона 33 связан с первым (R) входом второго RS-триггера 34 и представляет первый выход (признака ответа водолаза) контроллера маршевого движения 18, его второй выход (рассогласования по курсу) представляет выход первого вычитателя 40, его третий выход (рассогласования по глубине) представляет выход второго вычитателя 44, его четвертый выход (продольного рассогласования) представляет выход третьего вычитателя 49, вход (синхронизации) контроллера маршевого движения 18 представлен связанными вместе вторым (S) входом второго RS-триггера 34 и первыми (S) входами третьего 38, четвертого 42, пятого 46 RS-триггеров, (прямой) выход второго RS-триггера 34 соединен с первым входом (разрешения) третьего счетчика 35, выход третьего генератора импульсов 36 связан со вторым (счетным) входом третьего счетчика 35 и первыми (счетными) входами четвертого 39, пятого 43, шестого 47 счетчиков, выход третьего счетчика 35 связан с первым входом первого вычитателя 40, выход третьего гидрофона 37 соединен со вторым (R) входом третьего RS-триггера 38, (прямой) выход которого связан со вторым входом (разрешения) четвертого счетчика 39, выход четвертого счетчика 39 связан со вторым входом первого вычитателя 40, выход четвертого гидрофона 41 связан со вторым (R) входом четвертого RS-триггера 42, (прямой) выход которого соединен со вторым входом (разрешения) пятого счетчика 43, выход пятого счетчика 43 связан с первыми входами второго вычитателя 44 и первого сумматора 50, выход пятого гидрофона 45 подключен ко второму (R) входу пятого RS-триггера 46, (прямой) выход которого соединен со вторым входом (разрешения) шестого счетчика 47, выход которого связан со вторыми входами второго вычитателя 44 и первого сумматора 50, выход первого сумматора 50 соединен с первым входом третьего вычитателя 49, ко второму входу которого подсоединен выход датчика установочного расстояния 42,
причем второй акустический излучатель 10, второй 33, третий 37, четвертый 41 и пятый 45 гидрофоны размещают непосредственно на корпусе дрона или на кронштейнах в плоскости его фронтальной части, при этом второй 33 и третий 37 гидрофоны размещают в горизонтальной диаметральной плоскости дрона симметрично относительно его вертикальной диаметральной плоскости с максимально возможным их разнесением, а четвертый 41 и пятый 45 гидрофоны размещают в вертикальной диаметральной плоскости дрона симметрично относительно его горизонтальной диаметральной плоскости с максимально возможным их разнесением. Контроллер динамического позиционирования 25 (фиг. 5) включает в себя следующие блоки:
51 - инерциальный навигационный модуль,
52 - пятый регистр,
53 - датчик текущего курса,
54 - синусный функциональный преобразователь,
55 - второй сумматор,
56 - первый умножитель,
57 - косинусный функциональный преобразователь,
58 - второй умножитель,
59 - шестой регистр,
60 - четвертый вычитатель,
61 - третий умножитель,
62 - четвертый умножитель,
63 - пятый вычитатель,
64 - шестой вычитатель,
65 - седьмой вычитатель,
66 - восьмой вычитатель,
67 - пятый многоканальный мультиплексор,
причем первый вход (признака потери связи) контроллера динамического позиционирования 25 представлен первым (управляющим) входом пятого многоканального мультиплексора 67, его второй вход (включения режима динамического позиционирования) представлен первым входом (записи) шестого регистра 59, первый выход (рассогласования по курсу) контроллера динамического позиционирования 25 представлен выходом пятого вычитателя 63, его второй выход (рассогласования по глубине) представлен выходом пятого многоканального мультиплексора 67, его третий выход (маршевого рассогласования) представлен выходом седьмого вычитателя 65, наконец, его четвертый выход (поперечного рассогласования) представлен выходом восьмого вычитателя 66, первый (информационный) и второй (синхронизация) выходы инерциального навигационного модуля 51 связаны соответственно с первым (информационным) и вторым (запись) входами пятого регистра 52, первый выход (группа разрядов, представляющая долготу) пятого регистра 52 связан с первыми входами первого 56 и третьего 61 умножителей, второй выход (группа разрядов, представляющая широту) пятого регистра 52 связан с первыми входами второго 58 и четвертого 62 умножителей, третий выход (группа разрядов, представляющая высоту) пятого регистра 52 связан со вторым (информационным) входом шестого регистра 59, первым входом шестого вычитателя 64 и вторым (информационным) входом пятого многоканального мультиплексора 67, выход датчика текущего курса 53 соединен со входами синусного 54 и косинусного 57 функциональных преобразователей 54, третьим (информационным) входом шестого регистра 59 и первым входом пятого вычитателя 63, выход синусного функционального преобразователя 54 соединен со вторыми входами второго 58 и третьего 61 умножителей, выход косинусного функционального преобразователя 57 связан со вторыми входами первого 56 и четвертого 62 преобразователей, выход первого умножителя 56 соединен с первым входом второго сумматора 55, второй вход которого связан с выходом второго умножителя 58, выход второго сумматора 55 связан с четвертым (информационным) входом шестого регистра 59 и первым входом восьмого вычитателя 66, выход третьего умножителя 61 связан с первым входом четвертого вычитателя 60, второй вход которого соединен с выходом четвертого умножителя 62, выход четвертого вычитателя 60 связан с пятым (информационным) входом шестого регистра 59 и первым входом седьмого вычитателя 65, первый, второй, третий, четвертый выходы шестого регистра 59 связаны со вторыми входами соответственно пятого 63, шестого 64, седьмого 65, восьмого 66 вычитателей, выход шестого вычитателя 64 соединен с третьим (информационным) входом пятого многоканального мультиплексора 67.
Система автоматического управления дроном (фиг. 3) работает следующим образом. В исходное место в водной среде водолаз и дрон могут попасть либо непосредственно выгрузкой с судна носителя, либо в результате использования дрона в качестве транспортировщика или буксировщика водолаза под его ручным управлением. Перед использованием системы с помощью тумблеров датчика установочной дистанции 29 задают в двоичном коде желаемую дистанцию между водолазом и дроном, а тумблер датчика команд 6 устанавливают в положение единичного сигнала на его выходе, соответствующее режиму динамического позиционирования дрона. Включают питание устройства управления дрона и непосредственно после этого устройства целеуказания водолаза. При этом автоматически обнуляются все элементы системы с памятью, в частности RS-триггеры 13, 34, 38, 42, 46, D-триггер 16, счетчики 4, 12, 35, 39, 43, 47, и регистры 20, 23, 27, 31, 52, 59. Соответствующие цепи для простоты здесь не показаны. Под действием второго генератора импульсов 11 (с рабочей частотой и длительностью импульса соответственно, например 0.2 гц и 0.5 сек) второй акустический излучатель 10 (с несущей частотой, например 25 кгц) регулярно формирует акустические импульсы, которые принимает и преобразует в электрические импульсы первый гидрофон 1. Эти сигналы поступают на первые входы (пуска) первого 2 и второго 7 ждущих мультивибраторов, и на первый вход (сброса) первого счетчика 4. В связи с тем, что единичный сигнал от датчика команд 6 запрещает запуск первого ждущего мультивибратора 2 и разрешает запуск второго ждущего мультивибратора 7, то в этом режиме будет периодически запускаться лишь второй ждущий мультивибратор 7. Единичные сигналы с (прямого) выхода второго ждущего мультивибратора 7 проходя через первый логический элемент ИЛИ 3 поступают на вход включения первого акустического излучателя 8 и заставляют его на каждый зондирующий акустический импульс со стороны дрона ретранслировать ответный всенаправленный акустический импульс со стороны водолаза. Одновременно на второй (счетный) вход первого счетчика 4 со стороны первого генератора импульсов 9 и вызывают наращивание его содержимого. Поскольку частоты первого 9 и второго 11 генераторов импульсов выбираются равными, то при нормальной акустической связи между дроном и водолазом первый счетчик 4 постоянно сбрасывается сигналами от первого гидрофона 1 и не происходит его переполнения. Однако в случае нарушения акустической связи от дрона к водолазу в течении заранее заданного времени происходит переполнение первого счетчика 4 и на его выходе (переполнения) формируется единичный сигнал, который поступает на вход индикатора 5. В итоге водолаз получает информацию о нарушении акустической связи с дроном и может принять соответствущие меры. Помимо управления вторым акустическим излучателем 10 сигналы от второго генератора импульсов 11 поступают на первый вход (синхронизации) контроллера маршевого движения 18, по которому последний вырабатывает на своем первом выходе (признака ответа водолаза) сигналы подтверждения приема акустических сигналов от водолаза. Длительность импульса второго ждущего мультивибратора 7 конструктивно задается заведомо существенно, например в два раза, больше длительности импульса первого ждущего мультивибратора 2. Увеличенная длительность ретранслируемых водолазом акустических импульсов служит командой дрону для перехода в режим динамического позиционирования. В устройстве управления дрона такая команда выявляется с помощью третьего ждущего мультивибратора 14 и логического элемента И 15. Длительность импульса третьего ждущего мультивибратора 14 конструктивно задается больше длительности первого ждущего мультивибратора 2, например на 50%, но существенно меньше длительности импульса второго ждущего мультивибратора 7. Тогда в случае прихода от водолаза каждого ретранслированного акустического импульса увеличенной длительности, по истечении длительности импульса третьего ждущего мультивибратора 14 на выходе логического элемента И 15 формируется единичный сигнал, который переводит D-триггер 16 в единичное состояние или подтверждает его. Единичный сигнал с (прямого) выхода D-триггера поступает через второй логический элемент ИЛИ 17 на первые (управляющие) входы первого 19, второго 22, третьего 26 и четвертого 30 многоканальных мультиплексоров, и второй вход (включения режима динамического позиционирования) контроллера динамического позиционирования 25. В результате включается в работу контроллер динамического позиционирования 25 и через первый 19, второй 22, третий 26 и четвертый 30 многоканальные мультиплексоры в первый 20, второй 23, третий 27 и четвертый 31 регистры по сигналам записи на их первых входах (записи) с выхода второго генератора импульсов 11 попадают значения рассогласований по курсу, глубине, вдоль маршрута движения и в поперечном направлении соответственно с первого, второго, третьего и четвертого выходов контроллера динамического позиционирования 25. Одновременно единичный сигнал с (прямого) выхода D-триггера 16 поступает на первые входы (управления коэффициентом передачи) сервопривода рулевого движителя 21, сервопривода движителя глубины 24, сервопривода маршевого движителя 28, сервопривода поперечного движителя 32 и приводит к соответствующему масштабированию внутренних цепей передачи указанных сервоприводов для корректной работы совместно с контроллером динамического позиционирования 25. В процессе динамического позиционирования дрона значения указанных рассогласований обновляются регулярно в темпе работы второго генератора импульсов 11. В итоге дрон остается на месте до тех пор, пока водолаз в своем датчике команд 6 не переведет тумблер в положение, обеспечивающее нулевой сигнал на своем выходе. Тогда длительность ретранслируемых акустических импульсов резко уменьшится, поскольку они будут уже генерироваться первым акустическим излучателем 8 под управлением первого ждущего мультивибратора 2. Это приводит к тому, что сигналы с первого выхода контроллера маршевого движения 18 поступая на второй (R) вход первого RS-триггера 13 и второй вход (записи) D-триггера 16 подтверждают их исходное нулевое состояние, соответствующее режиму маршевого движения дрона. Тогда нулевые сигналы с (прямых) выходов указанных триггеров через посредство логического элемента ИЛИ 17 обеспечивают нулевые сигналы на первых (управляющих) входах первого 19, второго 22, третьего 26 и четвертого 30 многоканальных мультиплексоров. В этом случае значения рассогласований по курсу, глубине и вдоль маршрута движения со второго, третьего и четвертого выходов контроллера маршевого движения 18, а также нулевой код с выхода датчика векторного нуля 29 в виде двоичных параллельных кодов проходят соответственно через первый 19, второй 22, третий 26 и четвертый 30 многоканальные мультиплексоры и по сигналу второго генератора импульсов 11 записываются соответственно в первый 20, второй 23, третий 27 и четвертый 31 регистры. Перечисленные регистры всегда открыты на чтение и текущие рассогласования по курсу, глубине, вдоль маршрута движения и нулевой код поступают на вторые (информационные) входы соответственно сервоприводов курсового движителя 21, движителя глубины 24, маршевого движителя 28 и поперечного движителя 32. Одновременно нулевой сигнал с (прямого) выхода D-триггера 16 поступает на первые входы (управления коэффициентом передачи) сервопривода рулевого движителя 21, сервопривода движителя глубины 24, сервопривода маршевого движителя 28, сервопривода поперечного движителя 32 и приводит к соответствующему масштабированию внутренних цепей передачи указанных сервоприводов для корректной работы совместно с контроллером маршевого движения 18. В процессе маршевого движения дрона значения указанных рассогласований обновляются регулярно в темпе работы второго генератора импульсов 11. В итоге дрон сопровождает водолаза с соблюдением заранее заданной дистанции при всех перемещениях водолаза в водной среде. При этом поперечный движитель дрона в режиме маршевого движения фактически не используется. В ходе сеанса погружения водолаза он может переводить дрон из одного режима движения в другой и обратно произвольное число раз.
При наличии нормальной обратной акустической связи от водолаза к дрону второй счетчик 12 никогда не достигнет переполнения, поскольку на каждый сигнал наращивания его содержимого от второго генератора импульсов 11 приходит сигнал сброса счетчика с первого выхода контроллера маршевого движения 18. Однако в случае нарушения акустической связи от водолаза к дрону более заранее заданного времени, зависящего от выбранной частоты второго генератора импульсов 11 и разрядности второго счетчика 12, происходит переполнение второго счетчика 12 и сигналы с его выхода переведут первый RS-триггер 13 в единичное состояние и далее будут подтверждать это состояние - состояние аварийной ситуации. Тогда единичный сигнал с (прямого) выхода первого RS-триггера 13 через второй логический элемент ИЛИ 17 поступает на первый вход (признака потери связи) контроллера динамического позиционирования 25. В результате этот контроллер в качестве сигнала рассогласования по глубине начинает выдавать значение текущей глубины дрона и дрон постепенно всплывает без водолаза, что служит сигналом для службы надводного обеспечения работы водолаза о создавшейся аварийной ситуации.
Сеанс погружения водолаза может завершаться перемещением водолаза, и вслед за ним дрона, к судну-носителю, переводом дрона в режим динамического позиционирования, выключением питания устройства управления дрона и устройства целеуказания дрона, и поднятием водолаза и дрона на борт судна-носителя. Сеанс погружения водолаза может завершаться также при нахождении дрона в режиме динамического позиционирования с последующим выключением питания устройства управления дрона и устройства целеуказания дрона, и использованием дрона в качестве буксировщика для возвращения водолаза и дрона к судну-носителю.
Контроллер маршевого движения 18 (фиг. 4) служит для формирования входных сигналов сервоприводов дрона, обеспечиващих ему возможность автоматического сопровождения на заданном расстоянии водолаза в процессе его перемещения в водной среде и работает следующим образом. С учетом горизонтального размещения второго 33 и третьего 37 гидрофонов на корпусе дрона (фиг. 6), курсовое рассогласование ΔK, очевидно, пропорционально разности расстояний от первого акустического излучателя 8, размещенного на теле водолаза, до второго 33 R2 и третьего 37 R3 гидрофонов, т.е. ΔK~R2-R3. Поскольку каждая из величин R2 и R3, очевидно, пропорциональна временным интервалам от момента излучения текущего зондирующего акустического импульса вторым акустическим излучателем 10, размещенном на корпусе дрона в плоскости размещения второго 33, третьего 37, четвертого 41 и пятого 45 гидрофонов, до моментов приема соответствующего ретранслированного акустического импульса вторым 33 Т2 и третьим 37 Т3 гидрофонов, то ΔK~R2-R3 ~Т2-Т3. Момент начала зондирующего импульса определяется соответствующим синхроимпульсом, поступающему в контроллер маршевого движения 18 по его первому входу. Этот сигнал переводит в единичное состояние второй 34 и третий 38 RS -триггеры. Единичные сигналы с (прямых) выходов указанных триггеров для третьего 35 и четвертого 39 счетчиков, соответственно, играют роль разрешительных сигналов. С этого момента в третий счетчик 35 по его второму (счетному) входу и в четвертый 39 счетчик по его первому (счетному) входу поступают и накапливаются сигналы от третьего генератора импульсов 36 с рабочей частотой на несколько порядков выше частоты второго генератора импульсов 11 (например, 2 кгц). Накопление содержимого указанных счетчиков происходит до сброса второго 34 и третьего 38 RS-триггеров. Эти события происходят по сигналам с выходов второго 33 и третьего 37 гидрофонов. В итоге в третьем счетчике 35 формируется значение пропорциональное временному интервалу Т2, а в четвертом счетчике 39 формируется значение пропорциональное временному интервалу Т3. Рассогласование по курсу ΔK формируется как разность значений третьего 35 и четвертого 39 счетчиков на выходе первого вычитателя 40, который представляет второй выход контроллера маршевого движения 18. С учетом вертикального размещения четвертого 41 и пятого 45 гидрофонов на корпусе дрона (фиг. 6), рассогласование по глубине ΔГ, очевидно, пропорционально разности расстояний от первого акустического излучателя 8, размещенного на теле водолаза, до четвертого 41 R4 и пятого 45 гидрофонов, т.е. ΔГ~R4-R5. Руководствуясь ранее приведенными соображениями, можно получить соотношение: ΔГ~Т4-Т5, где Т4 и Т5 временные интервалы от начала текущего зондирующего акустического импульса до момента выявления соответствующего ретранслированного акустического импульса соответственно четвертым 41 и пятым 45 гидрофонами. В контроллере маршевого движения формирование значения рассогласования по глубине ΔГ обеспечивается с помощью четвертого 41 и пятого 45 гидрофонов, четвертого 42 и пятого 46 RS-триггеров, пятого 43 и шестого 47 счетчиков, второго вычитателя 44. Работает канал вычисления ΔГ также, как и канал вычисления рассогласования по курсу ΔK. В частности, значения Т4 и Т5 формируются соответственно в пятом 43 и шестом 47 счетчиках, а собственно ΔГ~ Т4-Т5 формируется и выдается вторым вычитателем 44, выход которого представляет третий выход контроллера маршевого движения 18. Маршрутное рассогласование ΔМ вычисляется как разница между текущим фактическим и установочным расстоянием между акванавтом и дроном. Указанное фактическое расстояние приблизительно определяется выражением (R4+R5)/2 ≈ (Т4+Т5)/4, т.к. временные интервалы Т4 и Т5 учитывают двухкратное прохождение звуком расстояний соответственно R4 и R5. Выражение (Т4+Т5)/4 реализуется первым сумматором 50, причем операция деления на 4 реализуется посредством трактовки в качестве результата группы старших разрядов суммы (Т4+Т5), игнорируя два младших разряда. Для корректного вычисления маршрутного рассогласования установочное расстояние должно быть выражено в тех же единицах измерения, что и фактическое расстояние дрона до водолаза. Поэтому датчиком установочного расстояния 48 с помощью внутренних тублеров должно задаваться значение NУ≈(RУ*F3)/VB, равное количеству импульсов третьего генератора импульсов 36 проходящих за время прохождения звуком в воде установочного расстояния, где RУ-установочное расстояние в метрах, F3-рабочая частота третьего генератора импульсов 36 в герцах, VB - скорость распространения звука в воде (1500 м/сек [1]). Например, при желаемой установочной дистанции между водолазом и дроном 5 м и рабочей частоте третьего генератора импульсов 36 2 кгц, в датчике установочного расстояния следует устанавливать число 7, или в двоичной форме 111. Окончательно, маршрутное рассогласование формируется третьим вычитателем 49, выход которого совпадает с четвертым выходом контроллера маршрутного движения 18.
Контроллер динамического позиционирования 25 (фиг. 5) работает на основе использования инерциального навигационного модуля 51, например [2], и функционирует следующим образом. Поскольку инерциальные навигационные модули обычно выдают координаты несущих их объектов в географической системе координат (долгота, широта, высота над уровнем моря), а управление дроном в горизонтальной плоскости в силу фиксированных направлений тяги его движителей осуществляется в связанной продольно-поперечной системе координат (фиг. 6), в контроллере динамического позиционирования 25 отклонения дрона от точки позиционирования по долготе ΔД и широте ΔШ должны преобразовываться в продольные ΔМ и поперечные отклонения ΔП в соответствии с выражениями [3] с учетом текущего угла курса движения дрона а, определяемого датчиком текущего курса 53:
ΔМ~ - ΔД*sin α+ΔШ *cos α
ΔП~ ΔД*cos α+ΔШ*sin α
При этом отклонения дрона по глубине ΔГ совпадают с отклонениями по высоте ДВ в географической системе координат, т.е.
ΔГ~ ΔВ,
а отклонения дрона по курсу ΔК определяются из сопоставления предшествующих показаний угла α с последующими.
Для простоты здесь полагается, что в инерциальный навигационный модуль 51 встроен последовательно-параллельный адаптер через который по шине первого выхода модуля 51 по сигналам синхронизации с его второго выхода регулярно записываются в пятый регистр 52 в соответствующие группы разрядов текущие географические координаты дрона, а - именно долгота, широта и высота над уровнем моря (в данном случае глубина) дрона. Пятый регистр 52 всегда открыт на чтение и двоичный код долготы соответствующей группы разрядов регистра по шине его первого выхода поступает на первые входы первого 56 и третьего 61 умножителей, двоичный код широты соответствующей группы разрядов регистра по шине его второго выхода поступает на первые входы второго 58 и четвертого 62 умножителей, двоичный код глубины соответствующей группы разрядов регистра по шине его третьего выхода поступает на шины вторых (информационных) входов шестого регистра 59 и пятого многоканального мультиплексора 67, а также шину первого входа шестого вычитателя 64. Одновременно с выхода датчика текущего курса 53 двоичный код соответствующего угла поступает на входы синусного 54 и косинусного 57 функциональных преобразователей (например [4]), шину третьего (информационного) входа шестого регистра 59 и шину первого входа пятого вычитателя 63. В итоге на выходе синусного функционального преобразователя 54 формируется двоичный код значения sin α, который поступает на вторые входы второго 58 и третьего 61 умножителей. Второй умножитель 58 формирует произведение (ΔШ*sin α), двочный код которого поступает на шину второго входа второго сумматора 55. Одновременно на шине выхода косинусного функционального преобразователя 57 формируется двоичный код значения cos α, который поступает на шины вторых входов первого 56 и четвертого 62 умножителей. На шине выхода первого умножителя 56 формируется двоичный код значения (ΔД*cos α), который поступает на первый вход второго сумматора 55. Одновременно на выходе четвертого умножителя 62 формируется двоичный код значения (ΔШ* cos α), который поступает на шину второго входа четвертого вычитателя 60, на шину первого входа которого с выхода третьего умножителя 61 поступает двоичный код значения (ΔД*sin α). Во втором сумматоре 55 реализуется выражение (ΔД*cos α+ΔШ*sin α), двоичный код значения которого поступает на шину четвертого (информационного) входа пятого регистра 59 и шину первого входа восьмого вычитателя 66. В четвертом вычитателе 60 реализуется выражение (- ΔД*sin α+ΔШ*cos α), двоичный код значения которого поступает на шину пятого (информационного) входа пятого регистра 59 и шину первого входа седьмого вычитателя 65. По сигналу (включения режима динамического позиционирования) на втором входе контроллера динамического позиционирования 25, совпадающему с первым входом (записи) шестого регистра 59 происходит запоминание координат точки динамического позиционирования дрона в связанной с ним системе координат. Шестой регистр 59 всегда открыт на чтение. По шине его первого выхода двоичный код позиционируемого курса дрона поступает на шину второго входа пятого вычитателя 63, в котором вычисляется разница между текущим и позиционируемым курсом дрона, и таким образом на первом выходе контроллера динамического позиционирования 25 формируется двоичный код текущего рассогласования по курсу. По шине второго выхода шестого регистра 59 двоичный код позиционируемой глубины дрона поступает на шину второго входа шестого вычитателя 64, в котором вычисляется разница между текущей и позиционируемой глубиной дрона. Двоичный код указанного значения поступает на шину третьего входа пятого многоканального мультиплексора 67. При нулевом сигнале на первом входе (признака потери связи) контроллера динамического позиционирования 25, а значит и на первом (управляющем) входе пятого многоканального мультиплексора 67, двоичный код разницы между текущей и позиционируемой глубиной в качестве сигнала рассогласования по глубине поступает на второй выход контроллера динамического позиционирования 25. Однако при единичном сигнале на первом входе (признака потери связи) контроллера динамического позиционирования 25 на его втором выходе в качестве рассогласования по глубине выдается текущая глубина дрона. По шине третьего выхода шестого регистра 59 двоичный код позиционируемого продольного положения дрона поступает на шину второго входа седьмого вычитателя 65, в котором вычисляется разница между текущим и позиционируемым продольным положением дрона, и таким образом на третьем выходе контроллера динамического позиционирования 25 формируется двоичный код текущего маршрутного рассогласования. По шине четвертого выхода шестого регистра 59 двоичный код позиционируемого поперечного положения дрона поступает на шину второго входа восьмого вычитателя 66, в котором вычисляется разница между текущим и позиционируемым поперечным положением дрона, и таким образом на четвертом выходе контроллера динамического позиционирования 25 формируется двоичный код текущего поперечного рассогласования.
Изобретение можно использовать при поиске затонувших объектов (самолетов, судов, ценностей на них), полезных ископаемых, при выполнении подводных строительных работ (например, при строительстве нефтегазовых платформ), при выполнении спасательных и диверсионных операций.
Изобретение обладает следующими дополнительными преимуществами:
1. При нормативно неоправданной, например более 10 минут, потере акустической связи между водолазом и дроном, дрон не теряется в водной пучине, а всплывает на поверхность водной среды и может быть выловлен надводной службой обеспечения работы водолаза. Кроме того, само по себе аварийное всплытие дрона служит сигналом начала проведения спасательных мероприятий в отношении водолаза и определяет место их проведения.
2. При достаточной мощности движителей дрона в режиме динамического позиционирования, невзирая на подводные течения, дрон сохраняет не только первоначальное положение, но и первоначальную продольную ориентацию, что предотвращает потенциально возможные столновения дрона с подводными объектами по причине кручения дрона подводным течением.
3. В связи с небольшой дистанцией сопровождения водолаза, например 5 метров, можно использовать акустические излучатели сверхмалой мощности и к тому же на частоте ультразвука например, 25 кгц, что обеспечивает дополнительно и акустическую скрытность подводных работ водолаза.
4. Использование акустической связи между водолазом и дроном обеспечивает возможность использования системы в мутной воде.
5. Установка видеокамер во фронтальной части дрона, все время обращенной к водолазу, позволяет технически просто получать видеозаписи практически всех действий водолаза, которые можно использовать далее, например, для коррекции его действий и обмена опытом.
Дополнительная литература:
1. Радж Балдев, Раджендран В., Паланичами П. Применения ультразвука. Москва: Техносфера, 2006. - 576 с.
2. Система инерциальной навигации и стабилизации «ЛАДОГА-МЭ». Государственный научный центр Российской Федерации АО «КОНЦЕРН «ЦНИИ» ЭЛЕКТРОПРИБОР». (http://www.elektropribor.spb.ru/prod/rsinis).
3. Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. - Наука, М., 1974. - 831 с.
4. Устройство для вычисления синуса и косинуса угла (патент SU 868754, МПК G06F 7/547, опубл. 12.09.81).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ ДРОНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662297C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ МАШИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664033C1 |
| Преобразователь координат | 1990 |
|
SU1742816A2 |
| ШАГОВЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
RU2076451C1 |
| Спектроанализатор кардиосигналов | 1984 |
|
SU1170371A1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ | 2018 |
|
RU2714977C1 |
| Устройство для решения систем алгебраических уравнений | 1984 |
|
SU1325507A1 |
| УСТРОЙСТВО ДЕКОДИРОВАНИЯ РТСМ | 2008 |
|
RU2390930C2 |
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| РАСПРЕДЕЛИТЕЛЬ ИМПУЛЬСОВ ДЛЯ УПРАВЛЕНИЯ ЧЕТЫРЕХФАЗНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ | 1998 |
|
RU2133550C1 |





Система автоматического управления дроном сопровождения водолаза содержит на борту оборудования водолаза гидрофон, два ждущих мультивибратора, логический элемент ИЛИ, счетчик, индикатор, датчик команд, акустический излучатель, генератор импульсов, а на борту дрона его устройство управления содержит акустический излучатель, генератор импульсов, счетчик, RS-триггер, ждущий мультивибратор, логический элемент И, D-триггер, логический элемент ИЛИ, контроллер маршевого движения, четыре многоканальных мультиплексора, четыре регистра, сервоприводы рулевого движителя, движителя глубины, маршевого движителя и поперечного движителя, контроллер динамического позиционирования, датчик векторного нуля, соединенные определенным образом. Контроллер маршевого движения содержит пять гидрофонов, пять RS-триггеров, шесть счетчиков, генератор импульсов, три вычитателя, датчик установочного расстояния, сумматор, соединенные определенным образом. Контроллер динамического позиционирования содержит инерциальный навигационный модуль, два регистра, датчик текущего курса, синусный функциональный преобразователь, сумматор, четыре умножителя, косинусный функциональный преобразователь, пять вычитателей, многоканальный мультиплексор, соединенные определенным образом. Обеспечивается повышение производительности, безопасности и визуальной скрытности труда водолаза в процессе выполнения подводных работ. 3 н.п. ф-лы, 6 ил.
1. Система автоматического управления дроном сопровождения водолаза, содержащая на борту дрона первый сумматор, а также первый умножитель, своим выходом связанный с первым входом второго сумматора, отличающаяся тем, что в нее дополнительно введены
в составе оборудования водолаза:
первый гидрофон, первый ждущий мультивибратор, первый логический элемент ИЛИ, первый счетчик, индикатор, датчик команд, второй ждущий мультивибратор, первый акустический излучатель, первый генератор импульсов,
причем выход первого гидрофона связан с первым входом первого ждущего мультивибратора, первым входом первого счетчика и первым входом второго ждущего мультивибратора, выход датчика команд соединен со вторым входом первого ждущего мультивибратора и вторым входом второго ждущего мультивибратора, выходы которых связаны соответственно с первым и вторым входами первого логического элемента ИЛИ, выход которого подключен к входу первого акустического излучателя, выход первого генератора импульсов соединен со вторым входом первого счетчика, выход которого подключен ко входу индикатора,
причем первый гидрофон и первый акустический излучатель размещают преимущественно с задней стороны водолаза,
в составе оборудования дрона дополнительно введены: второй акустический излучатель, второй генератор импульсов, второй счетчик, первый RS-триггер, третий ждущий мультивибратор, логический элемент И, D-триггер, второй логический элемент ИЛИ, контроллер маршевого движения, первый многоканальный мультиплексор, первый регистр, сервопривод рулевого движителя, второй многоканальный мультиплексор, второй регистр, сервопривод движителя глубины, контроллер динамического позиционирования, третий многоканальный мультиплексор, третий регистр,
сервопривод маршевого движителя, датчик векторного нуля, четвертый многоканальный мультиплексор, четвертый регистр, сервопривод поперечного движителя,
причем выход второго генератора импульсов связан с входом второго акустического излучателя, первым входом второго счетчика, первым входом контроллера маршевого движения, а также первыми входами первого, второго, третьего и четвертого регистров, выход второго счетчика соединен с первым входом первого RS-триггера, выход которого соединен с первым входом второго логического элемента ИЛИ и первым входом контроллера динамического позиционирования, выход третьего ждущего мультивиратора связан с первым входом логического элемента И, выход которого подключен к первому входу D-триггера, первый выход контроллера маршевого движения связан с входом третьего ждущего мультивибратора, вторым входом логического элемента И, вторым входом второго счетчика, вторыми входами первого RS-триггера и D-триггера, выход D-триггера связан со вторым входом второго логического элемента ИЛИ и первыми входами сервопривода рулевого движителя, сервопривода движителя глубины, сервопривода маршевого движителя и сервопривода поперечного движителя, выход второго логического элемента ИЛИ соединен с первыми входами первого, второго, третьего, четвертого многоканальных мультиплексоров, а также вторым входом контроллера динамического позиционирования, второй выход контроллера маршевого движения соединен со вторым входом первого многоканального мультиплексора, третий вход которого подключен к первому выходу контроллера динамического позиционирования, третий выход контроллера маршевого движения связан со вторым входом второго многоканального мультиплексора, третий вход которого подключен ко второму выходу контроллера динамического позиционирования, четвертый выход контроллера маршевого движения связан со вторым входом третьего многоканального мультиплексора, третий вход которого соединен с третьим выходом контроллера динамического позиционирования, четвертый выход которого связан со вторым входом четвертого многоканального мультиплексора, третий вход которого соединен с выходом датчика векторного нуля, выходы первого, второго, третьего и четвертого многоканальных мультиплексоров связаны соответственно со вторыми входами первого, второго, третьего и четвертого регистров, выходы которых связаны соответственно со вторыми входами сервопривода рулевого движителя, сервопривода движителя глубины, сервопривода маршевого движителя, сервопривода поперечного движителя.
2. Контроллер маршевого движения для системы по п. 1, отличающийся тем, что включает в себя следующие дополнительные блоки: второй гидрофон, второй RS-триггер, третий счетчик, третий генератор импульсов, третий гидрофон, третий RS-триггер, четвертый счетчик, первый вычитатель, четвертый гидрофон, четвертый RS-триггер, пятый счетчик, второй вычитатель, пятый гидрофон, пятый RS-триггер, шестой счетчик, датчик установочного расстояния, третий вычитатель,
и следующие дополнительные связи: выход второго гидрофона связан с первым входом второго RS-триггера и представляет первый выход контроллера маршевого движения, его второй выход представляет выход первого вычитателя, его третий выход представляет выход второго вычитателя, его четвертый выход представляет выход третьего вычитателя, вход контроллера маршевого движения представлен связанными вместе вторым входом второго RS-триггера и первыми входами третьего, четвертого, пятого RS-триггеров, выход второго RS-триггера соединен с первым входом третьего счетчика, выход третьего генератора импульсов связан со вторым входом третьего счетчика и первыми входами четвертого, пятого, шестого счетчиков, выход третьего счетчика связан с первым входом первого вычитателя, выход третьего гидрофона соединен со вторым входом третьего RS-триггера, выход которого связан со вторым входом четвертого счетчика, выход четвертого счетчика связан со вторым входом первого вычитателя, выход четвертого гидрофона связан со
вторым входом четвертого RS-триггера, выход которого соединен со вторым входом пятого счетчика, выход пятого счетчика связан с первыми входами второго вычитателя и первого сумматора, выход пятого гидрофона подключен ко второму входу пятого RS-триггера, выход которого соединен со вторым входом шестого счетчика, выход которого связан со вторыми входами второго вычитателя и первого сумматора, выход первого сумматора соединен с первым входом третьего вычитателя, ко второму входу которого подсоединен выход датчика установочного расстояния,
причем второй акустический излучатель, второй, третий, четвертый и пятый гидрофоны размещают непосредственно на корпусе дрона или на кронштейнах в плоскости его фронтальной части, при этом второй и третий гидрофоны размещают в горизонтальной диаметральной плоскости дрона симметрично относительно его вертикальной диаметральной плоскости с максимально возможным их разнесением, а четвертый и пятый гидрофоны размещают в вертикальной диаметральной плоскости дрона симметрично относительно его горизонтальной диаметральной плоскости с максимально возможным их разнесением.
3. Контроллер динамического позиционирования для системы по п. 1, отличающийся тем, что включает в себя следующие дополнительные блоки: инерциальный навигационный модуль, пятый регистр, датчик текущего курса, синусный функциональный преобразователь, косинусный функциональный преобразователь, второй умножитель, шестой регистр, четвертый вычитатель, третий умножитель, четвертый умножитель, пятый вычитатель, шестой вычитатель, седьмой вычитатель, восьмой вычитатель, пятый многоканальный мультиплексор,
и следующие дополнительные связи: первый вход контроллера динамического позиционирования представлен первым входом пятого многоканального мультиплексора, его второй вход представлен первым входом шестого регистра, первый выход контроллера динамического позиционирования представлен выходом пятого вычитателя, его второй выход представлен выходом пятого мультиплексора, его третий выход представлен выходом седьмого вычитателя, наконец, его четвертый выход представлен выходом восьмого вычитателя, первый и второй выходы инерциального навигационного модуля связаны соответственно с первым и вторым входами пятого регистра, первый выход пятого регистра связан с первыми входами первого и третьего умножителей, второй выход пятого регистра связан с первыми входами второго и четвертого умножителей, третий выход пятого регистра связан со вторым входом шестого регистра, первым входом шестого вычитателя и вторым входом пятого многоканального мультиплексора, выход датчика текущего курса соединен со входами синусного и косинусного функциональных преобразователей, третьим входом шестого регистра и первым входом пятого вычитателя, выход синусного функционального преобразователя соединен со вторыми входами второго и третьего умножителей, выход косинусного функционального преобразователя связан со вторыми входами первого и четвертого умножителей, второй вход второго сумматора связан с выходом второго умножителя, выход второго сумматора связан с четвертым входом шестого регистра и первым входом восьмого вычитателя, выход третьего умножителя связан с первым входом четвертого вычитателя, второй вход которого соединен с выходом четвертого умножителя, выход четвертого вычитателя связан с пятым входом шестого регистра, первый, второй, третий, четвертый выходы шестого регистра связаны со вторыми входами соответственно пятого, шестого, седьмого, восьмого вычитателей, выход шестого вычитателя соединен с третьим входом пятого многоканального мультиплексора.
| US 20160121983 A1, 05.05.2016 | |||
| US 20150276916 A1, 01.10.2015 | |||
| US 8995229 B2, 31.03.2015 | |||
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2365940C1 |

