Изобретение относится к технике радиосвязи и может быть использовано для организации обмена данными по каналу "воздух - земля" в системах управления воздушным движением.
Известны системы радиосвязи, содержащие разнесенные приемопередающие станции с генераторами тактовых импульсов, схемами формирования и дешифрации сообщений [1, 2, 3]. Обмен данными между разнесенными в пространстве станциями осуществляется в соответствии с заданными алгоритмами, принятыми режимами приоритетов.
Однако в системах управления воздушным движением эти системы радиосвязи применены быть не могут, так как в них не анализируется загруженность радиоканала связи, что может из-за отсутствия данных о ближайших воздушных судах привести к аварийной ситуации.
Наиболее близким по назначению и большинству существенных признаков является "Система радиосвязи с подвижными объектами" [4], которая и принята за прототип. Она состоит из наземной и бортовой приемопередающих радиостанций, между которыми осуществляется обмен данными в соответствии с заложенными алгоритмами.
При обмене сообщениями между наземной приемопередающей станцией и подвижными объектами связи загрузка канала меняется в зависимости от этапа полета и информационной активности абонентов цифровой радиосвязи. Счетчик числа подвижных объектов контролирует количество объектов и выдает это число на счетчик загрузки системы. В зависимости от числа объектов и числа переспросов сообщений в системе используются динамические алгоритмы организации обмена сообщениями и управления каналами радиосвязи. Для избежания столкновений при одновременной передаче несколькими объектами сообщений осуществляется контроль несущей за время воздействия на бортовой приемник. Определяется состояние, когда радиоканал свободен. Для разнесения во времени моментов выхода на связь нескольких подвижных объектов в бортовое устройство введены анализатор несущей частоты и генератор псевдослучайной задержки, которые обеспечивают соответствующую задержку на передачу сообщений от подвижных объектов. Информация о взаимном местоположении аэропорта и воздушного судна для решения на борту и в службах навигационных задач снимается с бортовых и наземных датчиков - блоков обработки данных глобальной навигационной системы. Для обеспечения непрерывности сопровождения по всей трассе полета предусмотрен обмен данными о параметрах воздушных судов между соседними наземными приемопередающими станциями.
Однако предоставление штурману и диспетчеру УВД 4-мерной информации о воздушном судне с точностью 7-15 м не решает проблемы посадки ВС по сигналам глобальной навигационной системы, так как в этом случае требуется точность 1-3 м. Кроме того, выход из строя аппаратуры спутника или выдача с одного из них недостоверной информации из-за неточности бортовых часов спутника, смещения его орбиты, задержки радиосигналов ионосферой после усреднения принятых данных в блоке обработки данных глобальной навигационной системы приводит к увеличению ошибки определения координат и параметров движения ВС. На подвижных объектах оценить достоверность принимаемой с навигационных спутников информации практически невозможно из-за трудности установки на нем дополнительных приемников сигналов навигационных систем и ограниченных ресурсов существующих вычислительных средств. Это приводит к снижению уровня безопасности полетов, особенно при посадке воздушного судна.
Основной задачей, на решение которой направлено заявляемое изобретение. является повышение точности определения координат и параметров движения воздушного судна с привязкой к глобальному времени в интересах управления воздушным движением.
Указанный технический результат достигается тем, что в систему радиосвязи с подвижными объектами, содержащую в наземной приемопередающей станции датчик местоположения, последовательно соединенные передатчик и модулятор, блок регистрации данных, блок выдачи данных, первый и второй элементы И, последовательно соединенные дешифратор сообщений, буферный регистр адресов подвижных объектов, счетчик числа объектов, счетчик загрузки системы, генератор тактовых импульсов свободного доступа, ключ свободного доступа и буферный запоминающий блок, последовательно соединенные формирователь временного окна и генератор тактовых импульсов адресного опроса, последовательно соединенные n-разрядной шиной дешифратор приоритетов сообщений, состоящий из n регистров приоритетов, и коммутатор-распределитель сообщений, блок таймеров приоритетных сообщений, состоящий из n таймеров, счетчик числа переспросов и генератор импульсов сброса, причем выход демодулятора соединен с первым входом первого элемента И, второй выход буферного регистра адресов подвижных объектов соединен с вторым входом первого элемента И, выход которого соединен с входом дешифратора приоритетов сообщений, выход которого соединен n-разрядной шиной с управляющим входом блока регистров приоритетных сообщений, первый выход коммутатора-распределителя сообщений соединен с информационным входом ключа свободного доступа и с информационным входом ключа адресного опроса, выход которого соединен со вторым входом буферного запоминающего блока, второй выход коммутатора-распределителя сообщений соединен со входом блока регистрации данных, выход блока выдачи данных соединен с третьим входом буферного запоминающего блока, выход счетчика числа переспросов соединен с вторым входом счетчика загрузки системы, второй выход которого соединен с входом формирователя временного окна, второй выход которого соединен с входом линии задержки, первый выход которой соединен с первым входом второго элемента И, выход генератора тактовых импульсов адресного опроса соединен с вторым входом второго элемента И, выход которого соединен с управляющим входом ключа адресного опроса, выход линии задержки соединен с четвертым входом буферного запоминающего блока, выход которого соединен с входами модулятора, счетчика числа переспросов и генератора импульсов сброса, выход которого соединен n-разрядной шиной с входом сброса блока регистров приоритетных сообщений, модем наземной связи, соединенный с двумя соседними удаленными наземными приемопередающими станциями, пульт управления наземной приемопередающей станцией, выход которого соединен с входами соответствующего блока регистрации данных и блока выдачи данных, а в бортовой приемопередающей станции - последовательно соединенные антенну, приемник и блок обработки данных глобальной навигационной системы, блок самолетного адреса, выход которого через (n+2)-ой канал блока регистров сообщений - к (n+2)-у входу шифратора приоритетов сообщений, пульт управления бортовой приемопередающей станции, выход которого соединен с входом блока регистрации данных, так и через (n+3)-й канал блока регистров сообщений с (n+3)-м входом шифратора приоритетов сообщений, последовательно соединенные антенный коммутатор, приемник, демодулятор и дешифратор адреса, последовательно соединенные модулятор и передатчик, выход которого соединен с входом антенного коммутатора, блок регистрации данных и блок выдачи данных, последовательно соединенные n-разрядной шиной, блок регистров сообщений, шифратор приоритетов сообщений и коммутатор - распределитель сообщений, последовательно соединенные генератор тактовых импульсов, ключ адресного опроса, реле времени, линию задержки и генератор случайных чисел, дешифратор режима, последовательно соединенные анализатор несущей частоты, генератор псевдослучайной задержки и ключ свободного доступа, причем выход дешифратора адреса соединен с входом дешифратора режима, первый выход которого соединен с входом блока регистрации данных, второй и третий выходы дешифратора режима соединены со вторым входом соответственно ключа адресного опроса и ключа свободного доступа, выход блока выдачи данных соединен n-разрядной шиной с входом блока регистров сообщений, выход коммутатора-распределителя сообщений соединен с третьим входом ключа адресного опроса и с третьим входом ключа свободного доступа, второй выход генератора тактовых импульсов соединен с четвертым входом ключа свободного доступа, выход которого соединен с первым входом модулятора, выход генератора случайных чисел соединен со вторым входом модулятора, второй выход приемника соединен с входом анализатора несущей частоты, в наземную приемопередающую станцию введен вычислительный блок, первый выход которого соединен со вторым входом блока выдачи данных, второй выход - с первым входом блока регистрации данных и с преобразователем формата данных, третий выход - с входом второго передатчика, первый вход вычислительного блока соединен с датчиком местоположения, второй вход - с выходом коммутатора-распределителя сообщений, остальные N входов - с выходами N введенных блоков обработки данных глобальной навигационной системы, соединенных через соответствующие последовательно соединенные N приемников с антеннами, выход второго передатчика подключен к второй антенне, вход/выход вычислительного блока соединен двухсторонними связями с модемом наземной связи, в бортовую приемопередающую станцию введен вычислительный блок, первый вход которого соединен через второй приемник со второй антенной, второй вход подключен к второму выходу дешифратора режима, вход/выход вычислительного блока соединен двухсторонними связями с выходом блока обработки данных глобальной навигационной системы, первый выход соединен со входом (n+1)-го канала блока регистров сообщений, второй выход - со вторым входом блока регистрации данных.
Одним из основных отличительных признаков заявляемого изобретения является наличие в наземной приемопередающей станции второго передатчика, а в бортовой - второго приемника, соединенных с соответствующими вычислительными блоками. Новая структура системы радиосвязи с подвижными объектами позволяет осуществлять информационный обмен по каналу "воздух - земля", что в свою очередь обеспечивает возможность посадки ВС по сигналам глобальной навигационной системы, так как в этом случае обеспечивается точность определения высоты (1-3) м. Передача дифференциальных поправок на ВС осуществляется по отдельному радиоканалу связи, созданному введенными передатчиком, приемником и антеннами, благодаря чему пропускная способность основного радиоканала связи, представленного в описании патента РФ №2195774, не изменится.
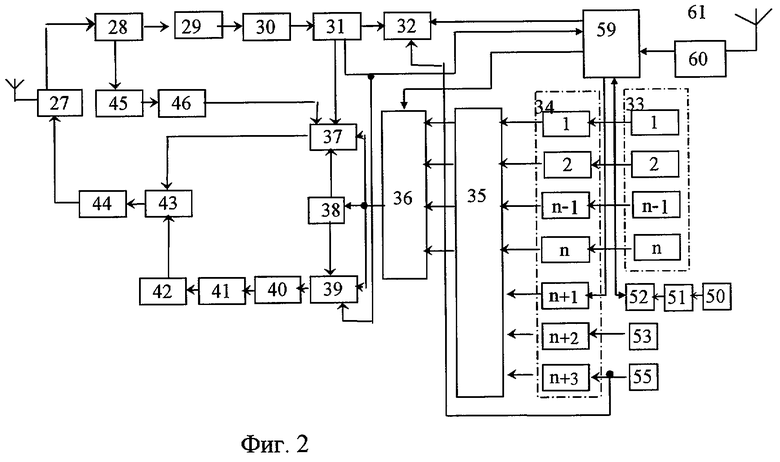
На фиг.1 приведена функциональная схема наземной приемопередающей станции и связи между ее узлами, на фиг.2 - функциональная схема бортовой приемопередающей станции.
Наземная приемопередающая станция 1 содержит приемник 2, демодулятор 3, дешифратор 4 сообщений, буферный регистр 5 адресов подвижных объектов, первый элемент И 6, дешифратор 7 приоритетов сообщений, блок 8 таймеров приоритетных сообщений, блок 9 регистров приоритетных сообщений, коммутатор-распределитель 10 сообщений, счетчик 11 числа подвижных объектов, счетчик 12 загрузки системы, генератор 13 тактовых импульсов свободного доступа, формирователь 14 временного окна, генератор 15 тактовых импульсов адресного опроса, линия 16 задержки, второй элемент И 17, ключ 18 свободного доступа, блок 19 выдачи данных как источник информации, ключ 20 адресного опроса, буферный запоминающий блок 21, счетчик 22 числа переспросов, генератор 23 импульсов сброса, блок 24 регистрации данных, модулятор 25 и передатчик 26, модем наземной связи 47, датчик местоположения 48, преобразователь 49 формата данных, пульт управления наземной приемопередающей станции 54, N введенных блоков 52 обработки данных глобальной навигационной системы, соединенных через соответствующие последовательно соединенные N приемников 51 с антеннами 50, вычислительный блок 56, второй передатчик 57, вторую антенну 58.
Бортовая приемопередающая станция системы радиосвязи с подвижными объектами содержит антенный коммутатор с антенной 27, приемник 28, демодулятор 29, дешифратор 30 адреса, дешифратор 31 режима, блок 32 регистрации данных, блок 33 выдачи данных, блок 34 регистров сообщений, шифратор 35 приоритетов сообщений, коммутатор-распределитель 36 сообщений, ключ 37 свободного доступа, генератор 38 тактовых импульсов, ключ 39 адресного опроса, реле 40 времени, линию 41 задержки, генератор 42 случайных чисел, модулятор 43, передатчик 44, анализатор 45 несущей частоты, генератор 46 псевдослучайной задержки, антенну 64, приемник 63 и блок 62 обработки данных глобальной навигационной системы, а также блок 53 самолетного адреса и пульт управления 55 бортовой приемопередающей станции, вычислительный блок 59, второй приемник 60, вторую антенну 61.
Система радиосвязи с подвижными объектами работает следующим образом. Во время движения подвижные объекты обмениваются данными с наземной приемопередающей станцией, находящейся в зоне радиосвязи. Принимаемые наземным приемником 2 из канала "воздух - земля" сообщения демодулируются в демодуляторе 3, и поступают в дешифратор 4 сообщений, который соединен с буферным регистром 5 адресов подвижных объектов, где в соответствии с принятым в системе протоколом обмена производится идентификация принятого в сообщении адреса с адресами подвижных объектов, хранящимися в буферном регистре 5 адресов подвижных объектов. При совпадении адреса подвижного объекта с хранящимся в списке адресом на элемент И 6 подается управляющий сигнал от буферного регистра 5 адресов подвижных объектов, и сообщение поступает в дешифратор 7 приоритетов сообщений. На второй вход дешифратора сообщений 4 поступают сообщения от вычислительного блока 56 через преобразователь формата 49. Ранжирование сообщений по приоритетам для входящих информационных сообщений в соответствии с принятыми в системе радиосвязи с подвижными объектами категориями срочности осуществляется при помощи сдвигающих регистров сообщений, в младший разряд которых первоначально записывается "1", что соответствует отсутствию сообщений. При поступлении из канала радиосвязи сообщений в регистрах проводится сдвиг сообщений соответствующих очередей, и запускаются таймеры приоритетов, число которых определяется числом принятых приоритетов сообщений в соответствии с протоколом обмена, которые и контролируют время нахождения сообщений в очереди соответствующей категории срочности. Блок 8 таймеров приоритетных сообщений определяет время "старения" информации, и, если сообщение в течение определенного промежутка времени не было передано в канал связи, то оно "стирается", и буферный запоминающий блок 21 посылает запрос на повторную передачу сообщения.
При выдерживании заданного времени сообщение в зависимости от загрузки системы через ключи 18 свободного доступа или ключи 20 адресного опроса или при введении с пульта управления 54 наземной приемопередающей станции через блок выдачи данных 19 поступает в буферный запоминающий блок 21, который формирует сообщение для передачи в канал радиосвязи в соответствии с протоколом обмена. Набираемое оператором (диспетчером) с пульта управления 54 сообщение отображается в блоке 24 регистрации данных.
При обмене сообщениями между наземной приемопередающей станцией и подвижными объектами загрузка канала изменяется в зависимости от этапа полета и информационной активности абонентов цифровой радиосвязи. Счетчик 11 числа подвижных объектов постоянно контролирует количество объектов и выдает это число на счетчик 12 загрузки системы, который определяет загрузку канала связи. В зависимости от числа подвижных объектов и числа переспросов сообщений канала радиосвязи в системе используются динамические алгоритмы организации обмена сообщениями и управления каналами радиосвязи, а также обмена данными между соседними наземными приемопередающими станциями 1. Может быть использован режим свободного доступа со стороны подвижных объектов или режим с выделением временного интервала.
Анализируя состояние и загрузку канала радиосвязи в системе связи с подвижными объектами, наземная приемопередающая станция 1 определяет число столкновений сообщений в канале радиосвязи, и когда это число превысит предельно допустимое, то система переходит в режим адресного опроса с целью упорядочения работы канала передачи данных "воздух - земля". Для того чтобы избежать столкновений при одновременной передаче сообщений несколькими объектами, осуществляется контроль несущей за время воздействия на бортовой приемник служебной части сообщений. Подготовленное сообщение передается только в том случае, когда радиоканал свободен. Для того чтобы разнести во времени моменты выхода на связь подвижных объектов в то время, когда они обнаружили, что радиоканал свободен, в бортовой приемопередающей станции используются анализатор 45 несущей частоты и генератор 46 псевдослучайной задержки, которые совместно обеспечивают задержку передачи сообщений от подвижных объектов на наземную приемопередающую радиостанцию.
При работе счетчик 12 загрузки системы выдает управляющий сигнал на генератор 13 тактовых импульсов свободного доступа, который задает цикл работы системы через ключ 18 свободного доступа в режиме свободного доступа.
Для этого используются данные номера воздушного судна, полученные с блока самолетного адреса 53 через (n+2)-ой канал блока 34 регистра сообщений, шифратор 35 приоритетов, коммутатор-распределитель 36 сообщений, ключ 37 свободного доступа или цепочку последовательно соединенных узлов 39, 40, 41, 42. Затем сообщения модулируется в модуляторе 43 и через передатчик 44 и не указанную на фиг.2 антенну излучаются в пространство. Набираемые пилотом на пульте 55 управления бортовой приемопередающей станции данные для контроля отображаются на блоке 32 регистрации данных и через (n+3)-ий канал блока 34 регистров сообщений, пройдя дополнительную обработку в узлах, указанных выше, излучаются в пространство. Периодичность посылки сообщений с пульта 55, если подвижный объект - воздушное судно, определяется пилотом в соответствии с ситуацией на воздушном судне.
При превышении загрузки системы граничной загрузки счетчик загрузки системы выдает управляющий сигнал для включения через триггер "окна" генератора 15 тактовых импульсов адресного опроса, который задает цикл работы системы через ключ 20 адресного опроса в режиме адресного опроса. В режиме адресного опроса инициатором связи может быть только наземная приемопередающая станция 1, которая в соответствии со списком адресов подвижных объектов, хранящихся в буферном регистре 5 адресов, периодически принимает данные от подвижных объектов. Предусмотрена возможность оперативной передачи по цифровому каналу радиосвязи аварийных (экстренных) сообщений от подвижных объектов связи. Если подвижные объекты сформировали для передачи сообщения и обнаружили, что радиоканал свободен, то они информируют остальные подвижные объекты о начале цикла передачи данных, в том числе о своем местоположении и случайным образом в выделенных им временных слотах распределяют очередность собственной передачи в этом цикле. Каждый из подвижных объектов, используя сигнал несущей в радиоканале и импульсы синхронизации, подсчитывает сумму периодов передачи и свободных периодов очередности (равным одному временному окну (слоту)). При совпадении этой суммы со значением установленной очередности подвижный объект начинает передачу собственного пакета в выделенном интервале времени.
Пульты 54, 55 управления в наземной и бортовой приемопередающих станциях, например для гражданской авиации, позволяют обеспечить обмен данными по каналу "диспетчер - пилот" в интересах службы УВД. Они предназначены для выбора элементов сообщений разрешения/ информации/запроса, которые соответствуют принятой речевой фразеологии и набора произвольного текста. Отображение набираемых и принятых сообщений осуществляется на регистрационных устройствах 24 и 32 соответственно.
Рассмотрим применение системы для передачи аварийных сообщений от подвижных объектов в режиме свободного доступа. Пусть за время, равное порогу ограничения Т, формируется путем выдачи от буферного запоминающего блока 21 соответствующая команда на открытие l окон для передачи аварийных сообщений от подвижных объектов в режиме свободного или временного доступа. Эти окна отстоят друг от друга на время, равное T/l(1+i). Длительность каждого окна t0 может быть случайной или детерминированной величиной, равной сумме K(1+i) периодов передачи и свободных периодов, где К - величина постоянная, причем t0<T/l(1+i). Таким образом, интервал времени между двумя соседними командами на формирование окон свободного доступа состоит из двух частей; первая из них представляет собой "окно" для передачи от подвижных объектов аварийных сообщений в режиме свободного доступа, длительностью t0, а вторая - для передачи сообщений от наземного приемопередатчика в режиме адресного опроса.
Система связи с подвижными объектами позволяет организовать передачу сообщений на открытие окон как в режиме свободного доступа, так и в режиме адресного опроса и с временным разделением слотов, предназначенных для передачи данных с подвижных объектов связи с использованием формирователя 14 временного окна, линии 16 задержки и элемента И 17, которые вырабатывают управляющие сигналы в буферный запоминающий блок 21 для передачи сообщения на подвижные объекты по открытию и закрытию "окон". Генератор 23 импульсов сброса осуществляет в блоке 9 регистров приоритетных сообщений сброс обработанных сообщений на соответствующих регистрах приоритетов. Счетчик 22 числа переспросов контролирует количество переданных сообщений и число подтверждений, полученных от подвижных объектов, и передает управляющие сигналы в счетчик 12 загрузки системы. Далее буферный запоминающий блок 21 получает предназначенное для передачи сообщение от блока 19 выдачи данных. Сообщения от модема 47 наземной связи, пройдя процедуры очереди с приоритетами в вычислительном блоке 56, через преобразователь формата 49 поступают в дешифратор сообщений 4 и далее по описанной общей схеме принятых сообщений к блокам 19 и 21, где формируются служебная и информационная части сообщения. Далее через последовательно соединенные модулятор 25, передатчик 26 и не указанную на фиг.1 антенну излучаются в пространство. В соответствии с используемым методом модуляции сообщения передаются в канал радиосвязи для подвижных объектов. В бортовой приемопередающей станции первый приемник 28 постоянно находится в режиме приема на частоте f1 (частота передачи опросного сообщения от наземной приемопередающей станции). После прохождения сообщения через не отмеченную на фиг.2 антенну, антенный коммутатор 27, первый приемник 28, демодулятор 29 оно поступает в дешифратор 30 адреса, где происходит идентификация принятого в сообщении адреса с адресом подвижного объекта, хранящимся в дешифраторе адреса. При соответствии адресов сообщение передается в дешифратор 31 режима, где происходит дешифрация полученной служебной части сообщения и определяется режим работы системы, затем информационная часть сообщения поступает в блок 32 регистрации данных, который может быть выполнен в виде ПЭВМ или другого устройства отображения. После дешифрации признака режима подается управляющий сигнал на ключи 37 свободного доступа или ключи 39 адресного опроса, которые управляются генератором 38 тактовых импульсов. Сообщение с выхода блока 62 обработки данных глобальной навигационной системы поступает на второй вход вычислительного блока 59, на первый вход которого подаются сигналы дифференциальной поправки, сформированные в вычислительном блоке 56 и переданные через узлы 57, 58, 61, 60. В вычислительном блоке 56 решается задача о целостности созвездия навигационных спутников и вырабатывается корректирующая информация - поправка приращения псевдодальности и скорость ее изменения с помощью дифференциального метода измерений [5]. Датчик местоположения 48 используется, как базовая неподвижная точка с заранее известными координатами. Число N введенных блоков обработки данных глобальной навигационной системы, соединенных через соответствующие последовательно соединенные N приемников с антеннами зависит от требуемой величины среднеквадратических отклонений и флуктуационных составляющих погрешности измерения псевдодальности. Чем больше N, тем меньше величина погрешности. Эти данные, а также сведения о неисправных спутниках через узлы 57 и 58 передаются на все подвижные объекты, находящиеся в зоне радиосвязи. В вычислительном блоке 59 эти поправки используются для корректировки результатов позиционирования с выхода блока 62. С вычислительного блока 59 на блок 62 поступают данные о неисправных спутниках, с которых нельзя использовать информацию. Полученные точные данные о местоположении подвижного объекта и его параметрах движения поступают на вход (n+1)-го канала блока регистров сообщений 34 и на второй вход блока регистрации данных 32. Кроме того, в вычислителе 59 анализируются передаваемые с наземной приемопередающей станции 1 запросные сообщения с дешифратора 31 режима.
Записанные в блоке 34 буферных регистров сообщений данные поступают на шифратор 35 сообщений, где происходит формирование служебной части сообщения и определяется приоритет в зависимости от приоритета абонентов цифровой связи. Далее сообщение поступает на коммутатор-распределитель 36 сообщений, который в зависимости от уровня приоритета или в соответствии с требованиями протокола обмена ранжирует их по очередности на передачу. Затем сообщения передаются на ключи 37 свободного доступа или ключи 39 адресного опроса в зависимости от режима работы системы, который определяется наземной приемопередающей станцией или алгоритмом обмена данными. Далее сообщения поступают или непосредственно на модулятор 43 или, пройдя через устройства 40, 41, 42, устанавливаются в заданном временном интервале и поступают на второй вход модулятора. В генераторе 42 случайных чисел при необходимости может быть осуществлена операция кодирования.
Устройства, указанные в заявленном объекте, могут быть реализованы следующим образом. Для реализации на земле передатчика 26, приемника 2, модулятора 25, демодулятора 3 могут быть использованы радиостанции "Полет-2" (ХЖ1.102.014), второго передатчика 57 - "Полет-1АМ1" (ИГЛМ.464115.051), второго приемника 60 - приемник "Полет-М1" (ИГЛМ.464318.005), антенн 58 и 61 - антенны АСВ-МВ2 и АМ3-МВ разработки ФГУП "НПП "Полет" соответственно. Вычислительные блоки 56 и 59 могут быть реализованы на microPC Octagon, а для выполнения функций узлов 44, 28, 43, 29 - радиостанция Р-862 (ИЖ1.101.013). Остальные операции дешифрирования, коммутации, хранения, регистрации и пересылки данных, аналогичные с прототипом могут быть выполнены на ИМС, ТТЛ, ТТЛШ или программно на ПЭВМ типа IBM PC. Модем 47 может быть выполнен на устройстве типа Modem Carol 5524DA1212, узлы 48, 50, 51, 52, 64, 63, 62 - на устройствах, выпускаемых фирмой "Tumble Navigation Ltd" для системы GPS. В качестве датчика местоположения 48 могут быть использованы также ПЗУ с неизменной координатной информацией о местоположении наземной приемопередающей станции.
На момент подачи заявки разработаны КД и программное обеспечение заявляемой системы радиосвязи. Использование заявляемой системы радиосвязи позволяет повысить точность определения координат и параметров движения воздушного судна, что расширяет ее функциональные возможности по сравнению с аналогами и прототипом, в том числе:
- обмен уточненными данными о местоположении наземной станции и воздушного судна позволит штурману оптимально спланировать маршрут движения, сократить время полета и, следовательно, потери топлива, избежать аварийной ситуации;
- соединенные последовательно наземные станции 1 обеспечивают беспровальное сопровождение воздушных судов и обмен данными между бортовыми и наземными станциями по всей трассе полета;
- повышение уровня безопасности полетов обеспечивается за счет предоставления штурману и диспетчеру 4-мерной информации, например, о воздушном судне с высокой точностью измерения высоты 1-3 м, что позволяет выполнить подход и посадку по 3 категории ИКАО (по сигналам навигационных спутников ГЛОНАСС и GPS с использованием дифференциального режима);
- контроль состояния созвездия навигационных спутников и выдача на соседние наземные приемопередающие станции сведений о неисправных спутниках для исключения их информации из процесса обработки.
Литература
1. АС №1119184, М. кл. Н 04 В 7/24, H 04 L 27/00, БИ №38, 1984.
2. AC №1075426, М. кл. Н 04 В 7/24, БИ №7, 1984.
3. AC №930719, М. кл. H 04 L 5/02, БИ №5, 1982.
4. Патент РФ №2195774 (прототип).
5. Глобальная система позиционирования АО "Прин", М. 76 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2001 |
|
RU2195774C2 |
| ЦЕНТРАЛЬНАЯ СТАНЦИЯ СИСТЕМЫ РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2006 |
|
RU2311737C1 |
| ЦЕНТРАЛЬНАЯ СТАНЦИЯ СИСТЕМЫ РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2308175C2 |
| ЦЕНТРАЛЬНАЯ СТАНЦИЯ СИСТЕМЫ РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2542671C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2309543C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2535923C1 |
| ЦЕНТРАЛЬНАЯ СТАНЦИЯ СИСТЕМЫ РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2003 |
|
RU2245001C1 |
| Система радиосвязи с подвижными объектами | 1986 |
|
SU1401626A1 |
| ЦЕНТРАЛЬНАЯ СТАНЦИЯ СИСТЕМЫ РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2003 |
|
RU2266618C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2544007C2 |
Изобретение относится к технике радиосвязи. Технический результат заключается в повышении точности определения координат и параметров движения воздушного судна с привязкой к глобальному времени в интересах управления воздушным движением. Сущность изобретения состоит в том, что в наземном вычислительном блоке системы радиосвязи с подвижными объектами решается задача целостности созвездия навигационных спутников и вырабатывается корректирующая информация - поправка приращения псевдодальности и скорость ее изменения с помощью дифференциального метода измерений. Эти данные, а также сведения о неисправных спутниках через второй передатчик и вторую наземную антенну передаются на все подвижные объекты, находящиеся в зоне радиосвязи. В бортовом вычислительном блоке эти поправки используются для корректировки результатов позиционирования с выхода блока обработки данных глобальной навигационной системы. С бортового вычислительного блока на бортовой блок обработки данных глобальной навигационной системы поступают данные о неисправных спутниках, с которых нельзя использовать информацию. Полученные точные данные о местоположении подвижного объекта отображаются на бортовом и наземном блоках регистрации. 2 ил.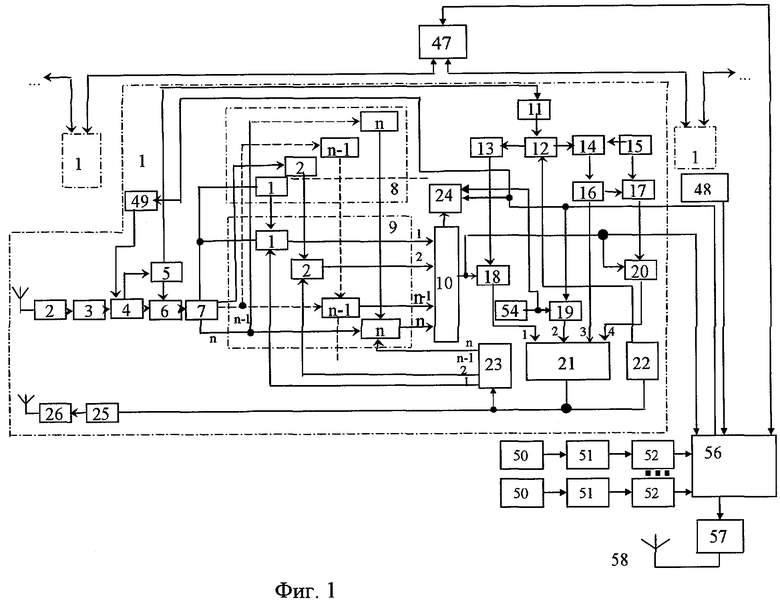
Система радиосвязи с подвижными объектами, содержащая в наземной приемопередающей станции датчик местоположения, последовательно соединенные передатчик и модулятор, блок регистрации данных, блок выдачи данных, первый и второй элементы И, последовательно соединенные дешифратор сообщений, буферный регистр адресов подвижных объектов, счетчик числа объектов, счетчик загрузки системы, генератор тактовых импульсов свободного доступа, ключ свободного доступа и буферный запоминающий блок, последовательно соединенные формирователь временного окна и генератор тактовых импульсов адресного опроса, последовательно соединенные n-разрядной шиной дешифратор приоритетов сообщений, состоящий из n регистров приоритетов, и коммутатор-распределитель сообщений, блок таймеров приоритетных сообщений, состоящий из n таймеров, счетчик числа переспросов и генератор импульсов сброса, причем выход демодулятора соединен с первым входом первого элемента И, второй выход буферного регистра адресов подвижных объектов соединен с вторым входом первого элемента И, выход которого соединен с входом дешифратора приоритетов сообщений, выход которого соединен n-разрядной шиной с управляющим входом блока регистров приоритетных сообщений, первый выход коммутатора-распределителя сообщений соединен с информационным входом ключа свободного доступа и с информационным входом ключа адресного опроса, выход которого соединен со вторым входом буферного запоминающего блока, второй выход коммутатора-распределителя сообщений соединен с входом блока регистрации данных, выход блока выдачи данных соединен с третьим входом буферного запоминающего блока, выход счетчика числа переспросов соединен с вторым входом счетчика загрузки системы, второй выход которого соединен с входом формирователя временного окна, второй выход которого соединен с входом линии задержки, первый выход которой соединен с первым входом второго элемента И, выход генератора тактовых импульсов адресного опроса соединен с вторым входом второго элемента И, выход которого соединен с управляющим входом ключа адресного опроса, выход линии задержки соединен с четвертым входом буферного запоминающего блока, выход которого соединен с входами модулятора, счетчика числа переспросов и генератора импульсов сброса, выход которого соединен n-разрядной шиной с входом сброса блока регистров приоритетных сообщений, модем наземной связи, соединенный с двумя соседними удаленными наземными приемопередающими станциями, пульт управления наземной приемопередающей станцией, выход которого соединен со входами соответствующего блока регистрации данных и блока выдачи данных, а в бортовой приемопередающей станции - последовательно соединенные антенну, приемник и блок обработки данных глобальной навигационной системы, блок самолетного адреса, выход которого через (n+2)-й канал блока регистров сообщений - к (n+2)-му входу шифратора приоритетов сообщений, пульт управления бортовой приемопередающей станции, выход которого соединен с входом блока регистрации данных, так и через (n+3)-й канал блока регистров сообщений с (n+3)-м входом шифратора приоритетов сообщений, последовательно соединенные антенный коммутатор, приемник, демодулятор и дешифратор адреса, последовательно соединенные модулятор и передатчик, выход которого соединен с входом антенного коммутатора, блок регистрации данных и блок выдачи данных, последовательно соединенные n-разрядной шиной, блок регистров сообщений, шифратор приоритетов сообщений и коммутатор-распределитель сообщений, последовательно соединенные генератор тактовых импульсов, ключ адресного опроса, реле времени, линию задержки и генератор случайных чисел, дешифратор режима, последовательно соединенные анализатор несущей частоты, генератор псевдослучайной задержки и ключ свободного доступа, причем выход дешифратора адреса соединен с входом дешифратора режима, первый выход которого соединен с входом блока регистрации данных, второй и третий выходы дешифратора режима соединены со вторыми входами соответственно ключа адресного опроса и ключа свободного доступа, выход блока выдачи данных соединен n-разрядной шиной с входом блока регистров сообщений, выход коммутатора-распределителя сообщений соединен с третьим входом ключа адресного опроса и с третьим входом ключа свободного доступа, второй выход генератора тактовых импульсов соединен с четвертым входом ключа свободного доступа, выход которого соединен с первым входом модулятора, выход генератора случайных чисел соединен со вторым входом модулятора, второй выход приемника соединен с входом анализатора несущей частоты, отличающаяся тем, что в наземную приемопередающую станцию введен вычислительный блок, первый выход которого соединен со вторым входом блока выдачи данных, второй выход - с первым входом блока регистрации данных и с преобразователем формата данных, третий выход - с входом второго передатчика, первый вход вычислительного блока соединен с датчиком местоположения, второй вход - с выходом коммутатора-распределителя сообщений, остальные N входов - с выходами N введенных блоков обработки данных глобальной навигационной системы, соединенных через соответствующие последовательно соединенные N приемников с антеннами, выход второго передатчика подключен к второй антенне, вход/выход вычислительного блока соединен двухсторонними связями с модемом наземной связи, в бортовую приемопередающую станцию введен вычислительный блок, первый вход которого соединен через второй приемник со второй антенной, второй вход подключен ко второму выходу дешифратора режима, вход/выход вычислительного блока соединен двухсторонними связями с выходом блока обработки данных глобальной навигационной системы, первый выход соединен с входом (n+1)-го канала блока регистров сообщений, второй выход - со вторым входом блока регистрации данных, третий выход - с управляющим входом коммутатора-распределителя сообщений.
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2001 |
|
RU2195774C2 |
| US 4704611, 03.11.1983 | |||
| АНТЕННАЯ СИСТЕМА И БАЗОВАЯ СТАНЦИЯ СИСТЕМЫ СВЯЗИ И СПОСОБ СОЗДАНИЯ В НЕЙ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ ПЕРЕДАВАЕМЫХ СИГНАЛОВ | 1994 |
|
RU2107989C1 |
| Система радиосвязи с подвижным объектом | 1988 |
|
SU1800627A1 |
| Система передачи и приема дискретной информации | 1983 |
|
SU1119184A1 |

