Настоящее изобретение относится к области гидроакустики и предназначено для распознавания объектов по их шумоизлучению.
Известны способы классификации объектов по анализу структуры эхосигналов при использовании спектральных, корреляционных и кепстральных классификационных признаков (А.Н.Яковлев, Г.П.Каблов «Гидролокаторы ближнего действия». Л.: Судостроение, 1983 г., стр.117).
В системах, использующих методы обнаружения и классификации целей по анализу их шумоизлучения, используют признаки, основанные на особенностях спектрального состава сигнала, так называемого "портрета". (В.С.Бурдик "Анализ гидроакустических систем". Л.: Судостроение, 1988 г., стр.322).
Более подробно акустические "портреты" рассмотрены в работе (Л.Л.Мясников, Е.Н.Мясникова "Автоматическое распознавание звуковых образов". Л.: Энергия, стр.50).
Наиболее близким аналогом предлагаемого изобретения является способ классификации, описанный в работе (В.В.Деев и др. "Анализ информации оператором-гидроакустиком". Л.: Судостроение, 1989 г., стр.111).
Способ содержит следующие операции: прием сигналов шумоизлучения шумящего объекта приемной антенной; вычисление оценки комплексного спектра принятых сигналов шумоизлучения; анализ спектрального состав; выделение дискретных составляющих; построение звукорядов; принятие решения о классе шумящего объекта по особенностям спектрального состава принятых сигналов шумоизлучения.
Однако для современных объектов характерно уменьшение числа дискретных составляющих, в результате чего дискретные структуры спектров становятся малоинформативными, что делает классификацию по дискретным составляющим неэффективной. Кроме того, способ классификации по дискретным составляющим спектра будет работать только в том случае, если все шумящие объекты одного класса имеют общие дискретные составляющие, что для большинства современных шумящих объектов не соблюдается. (Л.Л.Мясников, Е.Н.Мясникова "Автоматическое распознавание звуковых образов" Л.: Энергия, стр.50).
Задачей изобретения является повышение эффективности классификации шумящих объектов по спектральным характеристикам их шумоизлучения.
Для решения поставленной задачи в способ классификации шумящих объектов, включающий прием сигналов шумоизлучения шумящих объектов первой приемной антенной, спектральный анализ принятых сигналов шумоизлучения и принятие решения о классе шумящего объекта по характеристикам спектра, введены новые признаки, а именно:
прием сигналов шумоизлучения производят второй приемной антенной, выделяют взаимный спектр сигналов шумоизлучения, принятых первой и второй приемными антеннами, выделяют автокорреляционную функцию взаимного спектра сигналов шумоизлучения, принятых первой и второй приемными антеннами, измеряют значение несущей частоты автокорреляционной функции, а решение о классе шумящего объекта принимают при сравнении измеренной несущей частоты автокорреляционной функции с пороговыми частотами, каждую из которых определяют как среднюю частоту исходной полосы шумоизлучения эталонного объекта определенного класса.
Техническим результатом предлагаемого способа является обеспечение возможности классификации шумящего объекта по значению средней частоты спектра шумоизлучения. Покажем возможность достижения указанного технического результата предложенным способом.
Если сигналы шумоизлучения некоторого объекта принимается двумя приемными антеннами, то для временных реализаций Х1(t) и Х2(t) сигналов шумоизлучения, принятых первой и второй антеннами, можно записать
 ,
,
 ,
,
и  ,
,
где ωв - верхняя граничная частота принятых сигналов шумоизлучения;
ωн - нижняя граничная частота принятых сигналов шумоизлучения;
 - взаимный энергетический спектр, сигналов шумоизлучения, принятых первой и второй приемными антеннами, равный энергетическому спектру при малом разнесении первой и второй приемных антенн.
- взаимный энергетический спектр, сигналов шумоизлучения, принятых первой и второй приемными антеннами, равный энергетическому спектру при малом разнесении первой и второй приемных антенн.
Если полученный взаимный энергетический спектр подвергнуть еще раз дискретному преобразованию Фурье, то в результате будет получена автокорреляционная функция (вторичный спектр)
 ,
,
 .
.
Аргумент функции  определяет несущую частоту автокорреляционной функции, которая при этом является средней частотой полосы частот принятых сигналов шумоизлучения этого объекта. Таким образом, в той степени, в которой полоса частот сигналов шумоизлучения объекта и средняя частота характеризуют объект шумоизлучения, измеренная средняя частота будет характеризовать объект и его класс.
определяет несущую частоту автокорреляционной функции, которая при этом является средней частотой полосы частот принятых сигналов шумоизлучения этого объекта. Таким образом, в той степени, в которой полоса частот сигналов шумоизлучения объекта и средняя частота характеризуют объект шумоизлучения, измеренная средняя частота будет характеризовать объект и его класс.
Прямое измерение этой средней частоты  неосуществимо, поскольку трудно определить границы спектра принятого сигнала шумоизлучения в условиях помех. При выделении автокорреляционной функции средняя частота определяется автоматически как несущая частота автокорреляционной функции. Таким образом, класс объекта может быть определен сопоставлением измеренной несущей частоты автокорреляционной функции классифицируемого шумящего объекта с пороговыми частотами, каждая из которых определяется средней частотой исходной полосы шумоизлучения эталонного объекта определенного класса.
неосуществимо, поскольку трудно определить границы спектра принятого сигнала шумоизлучения в условиях помех. При выделении автокорреляционной функции средняя частота определяется автоматически как несущая частота автокорреляционной функции. Таким образом, класс объекта может быть определен сопоставлением измеренной несущей частоты автокорреляционной функции классифицируемого шумящего объекта с пороговыми частотами, каждая из которых определяется средней частотой исходной полосы шумоизлучения эталонного объекта определенного класса.
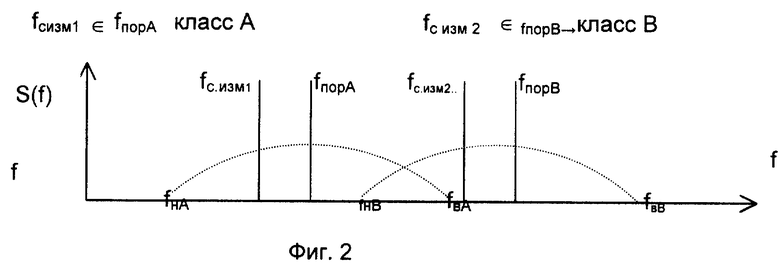
Сущность изобретения поясняется чертежами, где на фиг.1 представлена блок-схема, реализующая данный способ; на фиг.2 даны пояснения к заявленному способу, где обозначено: fнА - нижняя граничная частота полосы частот шумоизлучения эталонного объекта класса А; fвА - верхняя граничная частота полосы частот шумоизлучения эталонного объекта класса A, fпорА - пороговая частота эталонного объекта класса А; fнВ - нижняя граничная частота полосы частот шумоизлучения эталонного объекта класса В; fвВ - верхняя граничная частота полосы частот шумоизлучения эталонного объекта класса В, fnopB - пороговая частота эталонного объекта класса В; fс.изм1. - измеренная средняя частота полосы частот сигналов шумоизлучения 1-го шумящего объекта; fс.изм2. - измеренная средняя частота полосы частот сигналов шумоизлучения 2-го шумящего объекта, S(f) - зависимость спектральной плотности шумоизлучения объекта от частоты.
Устройство, реализующее способ (фиг.1), содержит первую и вторую приемные антенны 1 и 2, выходы которых соединены через первый блок быстрого преобразования Фурье (БПФ) 3 со входом второго блока БПФ 4, и далее через блок 5 измерения частоты с блоком 6 принятия решения, второй вход которого соединен со входом блока 7 пороговых частот.
С помощью рассмотренного устройства предложенный способ реализуется следующим образом.
Сигналы, принимаемые с двух приемных антенн 1 и 2, подаются на блок БПФ 3 выделения взаимного спектра и далее на второй блок БПФ 4. На выходе блока 4 формируется временная автокорреляционная функция В(τ), определяемая полосой принятого сигнала шумоизлучения. В блоке 5 измеряется несущая частота автокорреляционной функции, которая является средней частотой полосы частот сигналов шумоизлучения, принятых первой и второй приемными антеннами. В блоке памяти 7 имеются частоты, соответствующие средним частотам полосы частот шумоизлучения эталонных объектов, которые подаются на второй вход блока принятия решения 6. На первый вход блока 6 поступает измеренная несущая частота автокорреляционной функции сигналов шумоизлучения шумящего объекта. В блоке 6 производится сравнение измеренной частоты с пороговыми частотами и выносится решение о классе шумящего объекта.
Значения пороговых частот заносят в блок памяти 7 заранее. Пороговые частоты определяют для шумящих объектов разных классов, выбранных в качестве эталонных объектов в полигонных условиях на расстояниях, при которых зависимость сигналов шумоизлучения от частоты при распространении их в среде практически не сказывается на положении средней частоты полосы частот сигналов шумоизлучения.
Для эталонного объекта класса А (фиг.2) пороговая частота равна, fпорА
 .
.
Для эталонных объектов класса В (фиг.2) средняя пороговая частота fnopB равна  .
.
Пусть в процессе классификации были приняты сигналы шумоизлучения первого и второго шумящих объектов и измерены несущие частоты их автокорреляционных функций fс.изм1 и fс.изм2. Как видно из фиг.2, fс.изм1 лежит вблизи частоты fпорА, и это позволяет классифицировать первый шумящий объект как шумящий объект класса А, а fс.изм2 лежит вблизи частоты fпорВ, и это позволяет классифицировать второй шумящий объект как шумящий объект класса В. Тот факт, что fс.изм1<fпорА и fc.изм2<fпорВ, может быть объяснен особенностями распространения сигнала шумоизлучения в среде: сигналы шумоизлучения затухают пропорционально расстоянию, при этом высокочастотные сигналы при распространении затухают быстрее, чем низкочастотные, это и приводит к некоторому сдвигу измеренных несущих частот автокорреляционных функций первого и второго объектов в сторону низких частот относительно пороговых частот (А.П.Сташкевич. Акустика моря. Л.: Судостроение, 1966 г., стр.78).
Поскольку все шумящие объекты имеют свои частотные диапазоны, с большой достоверностью характеризующие класс шумящего объекта, то предлагаемый способ будет работать для любых шумящих объектов, сигналы шумоизлучения которых лежат в определенной полосе частот. Все изложенное позволяет считать задачу изобретения решенной.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КЛАССИФИКАЦИИ ШУМЯЩИХ ОБЪЕКТОВ | 2014 |
|
RU2570430C1 |
| Способ обработки сигнала шумоизлучения | 2022 |
|
RU2799118C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ ДО ШУМЯЩЕГО ОБЪЕКТА | 2014 |
|
RU2550576C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОБЪЕКТА | 2001 |
|
RU2191405C1 |
| Способ классификации, определения координат и параметров движения шумящего в море объекта в инфразвуковом диапазоне частот | 2019 |
|
RU2718144C1 |
| Устройство классификации шумящих объектов | 2017 |
|
RU2694271C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОБЪЕКТА ПО ЕГО ШУМОИЗЛУЧЕНИЮ | 2015 |
|
RU2593622C1 |
| СПОСОБ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2013 |
|
RU2559310C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ ОБЪЕКТОВ | 1995 |
|
RU2110810C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морских объектов | 2018 |
|
RU2711406C1 |
Изобретение относится к области гидроакустики и предназначено для распознавания объектов по их шумоизлучению. Технический результат заключается в повышении эффективности классификации шумящих объектов по спектральным характеристикам их шумоизлучения. Способ классификации шумящего объекта включает прием сигнала шумоизлучения шумящего объекта первой приемной антенной и спектральный анализ принятого сигнала шумоизлучения шумящего объекта, причем прием сигнала шумоизлучения производят также второй приемной антенной, выделяют взаимный спектр сигналов шумоизлучения, принятых первой и второй приемными антеннами, выделяют автокорреляционную функцию взаимного спектра сигналов шумоизлучения, принятых первой и второй приемными антеннами, измеряют значение несущей частоты автокорреляционной функции, а решение о классе шумящего объекта принимают при сравнении измеренной несущей частоты автокорреляционной функции с пороговыми частотами, каждую из которых определяют как среднюю частоту исходной полосы шумоизлучения каждого из эталонных объектов определенного класса. 2 ил.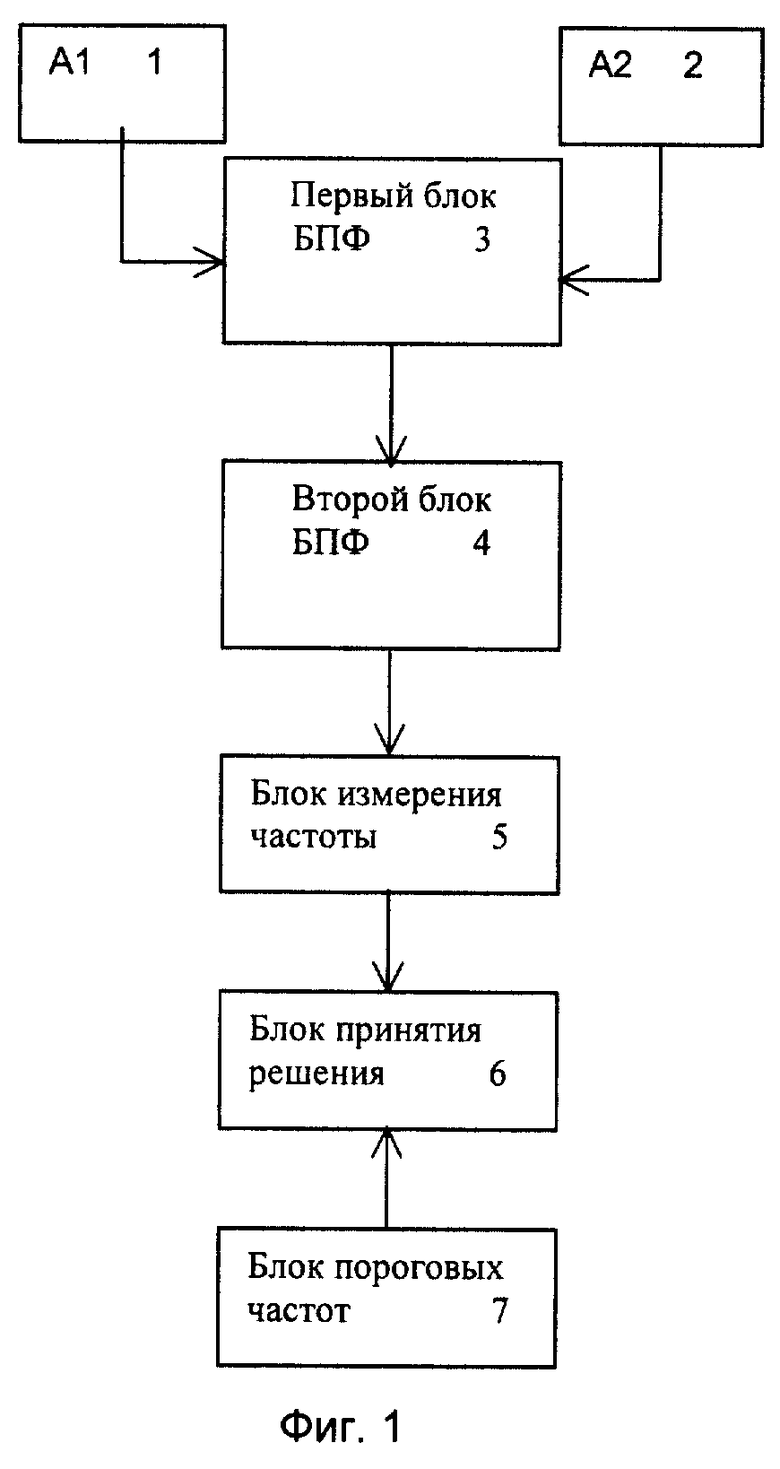
Способ классификации шумящего объекта, включающий прием сигнала шумоизлучения шумящего объекта первой приемной антенной и спектральный анализ принятого сигнала шумоизлучения шумящего объекта, отличающийся тем, что прием сигнала шумоизлучения производят также второй приемной антенной, выделяют взаимный спектр сигналов шумоизлучения, принятых первой и второй приемными антеннами, выделяют автокорреляционную функцию взаимного спектра сигналов шумоизлучения, принятых первой и второй приемными антеннами, измеряют значение несущей частоты автокорреляционной функции, а решение о классе шумящего объекта принимают при сравнении измеренной несущей частоты автокорреляционной функции с пороговыми частотами, каждую из которых определяют как среднюю частоту исходной полосы шумоизлучения каждого из эталонных объектов определенного класса.
| ДЕЕВ В.В | |||
| И ДР | |||
| Анализ информации оператором-гидроакустиком | |||
| Л.: Судостроение, 1989, с.111 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ ОБЪЕКТОВ | 1995 |
|
RU2110810C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ И СПОСОБ ПОЛУЧЕНИЯ ЦВЕТОВЫХ ШКАЛ ДЛЯ НЕГО | 1999 |
|
RU2156984C1 |
| US 5886661 A, 23.03.1999 | |||
| US 4524360, 18.06.1985. | |||

