Настоящее изобретение относится к области гидроакустики и предназначено для распознавания объектов по их шумоизлучению.
Известны способы классификации объектов по анализу их шумоизлучения, где используют признаки, основанные на особенностях спектрального состава сигнала, так называемого "портрета" (В.С. Бурдик "Анализ гидроакустических систем", Ленинград, Судостроение, 1988 г., стр. 322) Более подробно акустические "портреты" рассмотрены в работе Л.Л. Мясников, Е.Н. Мясникова "Автоматическое распознавание звуковых образов". Ленинград. Энергия, стр. 50.
Известен способ классификации, описанный в работе (В.В. Деев и др. "Анализ информации оператором-гидроакустиком", Ленинград, Судостроение, 1989 г., стр. 111).
Способ содержит следующие операции: прием сигналов шумоизлучения шумящего объекта приемной антенной; вычисление оценки комплексного спектра принятых сигналов шумоизлучения; анализ спектрального состав; выделение дискретных составляющих; построение звукорядов; принятие решения о классе шумящего объекта по особенностям спектрального состава принятых сигналов шумоизлучения.
Однако для современных объектов характерно уменьшение числа дискретных составляющих, в результате чего дискретные структуры спектров становятся малоинформативными, что делает классификацию по дискретным составляющим неэффективной.
Известен способ классификации шумящих объектов по патенту РФ №2262121, содержащий прием сигналов шумоизлучения шумящих объектов двумя половинами одной приемной антенны, спектральный анализ принятых сигналов шумоизлучения, при котором выделяют взаимный спектр сигналов шумоизлучения, принятых первой и второй половинами приемной антенны, выделяют автокорреляционную функцию взаимного спектра сигналов шумоизлучения, принятых первой и второй половинами приемной антенны, измеряют значение несущей частоты автокорреляционной функции, а решение о классе шумящего объекта принимают при сравнении измеренной несущей частоты автокорреляционной функции с пороговыми частотами, каждую из которых определяют, как среднюю частоту исходной полосы шумоизлучения эталонного объекта определенного класса.
Недостатком этого изобретения является необходимость двух половин одной антенны или двух идентичных антенн, что не всегда может быть реализовано из конструктивных соображений, а использование двух половин одной антенны снижает энергетический потенциал общей антенны и ее эффективность, что не всегда целесообразно. Кроме того, имеются определенные трудности в определении несущей частоты, поскольку на направлении приема могут оказаться несколько шумящих объектов, что приведет к искажению результатов измерений.
Задачей изобретения является повышение эффективности классификации объектов по их шумоизлучению при использовании одной антенны.
Техническим результатом предлагаемого способа является обеспечение возможности классификации цели при использовании системы обработки сигнала шумоизлучения объектов с использованием одной приемной антенны и повышение достоверности измерения классификационных признаков за счет предварительной обработки исходной классификационной информации.
Для достижения указанного технического результата в способ классификации шумящих объектов, содержащих прием сигналов шумоизлучения, спектральный анализ принятых сигналов шумоизлучения, определение взаимного спектра, определение автокорреляционной функции, введены новые признаки, а именно: прием сигнала шумоизлучения производят одной антенной, осуществляют последовательный набор временных реализаций, осуществляют выделение взаимного спектра между каждыми, следующими друг за другом, последовательными наборами временных реализаций, производят накопление выделенных последовательных взаимных спектров, определяют автокорреляционную функцию от накопленного взаимного спектра, определяют количество источников шумоизлучения по числу перегибов автокорреляционной функции, и при отсутствии перегибов, т.е. при наличии одного источника шумоизлучения производят классификацию шумящего объекта по ширине автокорреляционной функции или по ее несущей частоте.
Покажем возможность достижения указанного технического результата предложенным способом.
Известно, что если имеются два независимых стационарных эргодических процесса, то преобразование Фурье к-й реализации длительностью Τ каждого процесса определяется выражением (Д.Ж. Бендат, А. Пирсол «Измерение и анализ случайных процессов», Мир, Москва 1971 г., стр. 90-106).

Тогда взаимный спектр этих двух случайных процессов определяется соотношением:  где
где  - комплексно-сопряженный процесс, получаемый из исходного комплексного спектра. Если сигнал один и тот же, что соответствует входной реализации в соседних наборах временных дискретизированных отсчетов, содержащих один и тот же электрический шумовой сигнал, то взаимный спектр будет максимальным и определяться формулой: Gxy=limT/2{Xk *(f,T)Xk+1(f,T)}. Таким образом, если взаимный спектр определяется между двумя одинаковыми реализациями, представляющими собой электрический шумовой сигнал, имеющий одну и ту же полосу частот и коррелированный в соседних наборах дискретизированных отсчетов, то энергия взаимного спектра будет максимальной. При накоплении N спектров происходит суммирование спектров сигнала. Поскольку электрический шумовой сигнал принимается непрерывно, то его спектры незначительно отличаются от набора к набору, и можно считать, что взаимный спектр имеет максимальное значение и при суммировании формируется накопленный спектр, имеющий максимальное отношение сигнал/помеха. Смысловое техническое содержание понятия «взаимный спектр» достаточно хорошо известно из литературных источников, (см. Новиков А.К. «Измерения в корабельной акустике», Судостроение, Л., 1971 г., стр. 32, Дж. Бендат, А. Пирсон «Применения корреляционного и спектрального анализа», М., «Мир», 1983 г., стр. 60, С.И. Баскаков «Радиотехнические цепи и сигналы» М., Высшая школа, 1988 г., стр. 68). «Взаимный спектр» вычисляется как произведение комплексного спектра одной реализации на комплексный сопряженный спектр другой реализации. Вычисление взаимного спектра является стандартной процедурой спектрального анализа (Б.Р. Левин «Теоретические основы статистической радиотехники» М., Сов. Радио, 1966 г., стр. 216). Если полученный взаимный энергетический спектр подвергнуть еще раз дискретному преобразованию Фурье, то в результате будет получена автокорреляционная функция (вторичный спектр)
- комплексно-сопряженный процесс, получаемый из исходного комплексного спектра. Если сигнал один и тот же, что соответствует входной реализации в соседних наборах временных дискретизированных отсчетов, содержащих один и тот же электрический шумовой сигнал, то взаимный спектр будет максимальным и определяться формулой: Gxy=limT/2{Xk *(f,T)Xk+1(f,T)}. Таким образом, если взаимный спектр определяется между двумя одинаковыми реализациями, представляющими собой электрический шумовой сигнал, имеющий одну и ту же полосу частот и коррелированный в соседних наборах дискретизированных отсчетов, то энергия взаимного спектра будет максимальной. При накоплении N спектров происходит суммирование спектров сигнала. Поскольку электрический шумовой сигнал принимается непрерывно, то его спектры незначительно отличаются от набора к набору, и можно считать, что взаимный спектр имеет максимальное значение и при суммировании формируется накопленный спектр, имеющий максимальное отношение сигнал/помеха. Смысловое техническое содержание понятия «взаимный спектр» достаточно хорошо известно из литературных источников, (см. Новиков А.К. «Измерения в корабельной акустике», Судостроение, Л., 1971 г., стр. 32, Дж. Бендат, А. Пирсон «Применения корреляционного и спектрального анализа», М., «Мир», 1983 г., стр. 60, С.И. Баскаков «Радиотехнические цепи и сигналы» М., Высшая школа, 1988 г., стр. 68). «Взаимный спектр» вычисляется как произведение комплексного спектра одной реализации на комплексный сопряженный спектр другой реализации. Вычисление взаимного спектра является стандартной процедурой спектрального анализа (Б.Р. Левин «Теоретические основы статистической радиотехники» М., Сов. Радио, 1966 г., стр. 216). Если полученный взаимный энергетический спектр подвергнуть еще раз дискретному преобразованию Фурье, то в результате будет получена автокорреляционная функция (вторичный спектр)  , где ωв - верхняя граничная частота принятых сигналов шумоизлучения, ωн - нижняя граничная частота принятых сигналов шумоизлучения.
, где ωв - верхняя граничная частота принятых сигналов шумоизлучения, ωн - нижняя граничная частота принятых сигналов шумоизлучения. 
Аргумент функции  определяет несущую частоту автокорреляционной функции, которая при этом является средней частотой полосы частот принятых сигналов шумоизлучения этого объекта. Аргумент функции
определяет несущую частоту автокорреляционной функции, которая при этом является средней частотой полосы частот принятых сигналов шумоизлучения этого объекта. Аргумент функции  , определяет огибающую автокорреляционной функции, которая формируется полосой принятого сигнала (ωв-ωн). Если на направлении приема сигнала шумоизлучения расположены несколько шумящих объектов, то обрабатывается сигнал, равный сумме сигналов. Это приводит к искажению основного максимума огибающей автокорреляционной функции сигнала с самой широкой полосой. Сигналы шумоизлучения от различных источников являются не когерентными, поскольку они формируются различными механизмами и находятся на различных дистанциях. Поэтому их обработка производится независимо, как обработка нескольких независимых процессов и в этом случае суммарная автокорреляционная функция будет иметь вид:
, определяет огибающую автокорреляционной функции, которая формируется полосой принятого сигнала (ωв-ωн). Если на направлении приема сигнала шумоизлучения расположены несколько шумящих объектов, то обрабатывается сигнал, равный сумме сигналов. Это приводит к искажению основного максимума огибающей автокорреляционной функции сигнала с самой широкой полосой. Сигналы шумоизлучения от различных источников являются не когерентными, поскольку они формируются различными механизмами и находятся на различных дистанциях. Поэтому их обработка производится независимо, как обработка нескольких независимых процессов и в этом случае суммарная автокорреляционная функция будет иметь вид:  , где Β(τ1) - автокорреляционная функция первого процесса, В(τ2) - автокорреляционная функция второго процесса, В(τ3) - автокорреляционная функция третьего процесса (А.М. Заездный «Основы расчетов по статистической радиотехнике», стр. 88). Здесь каждому спектру соответствует своя автокорреляционная функция со своим интервалом корреляции, который определяется шириной спектра, характерного для данного источника шумоизлучения. Наличие одной или нескольких целей в направлении приема может быть определено по искажению ширины и формы огибающей первого максимума АКФ, который соответствует самому широкому спектру. Для этого используется отличие формы огибающей автокорреляционной функции одиночного шумового сигнала от формы огибающей автокорреляционной функции суммы независимых шумовых сигналов по числу перегибов огибающей. Если спектр первого шумового сигнала имеет полосу 5 кГц, то ширина автокорреляционной функции будет равна 0,2 мск. Если ширина спектра второго источника шумоизлучения составляет 1 кГц, то ширина автокорреляционной функции составит 1 мск. Ширина АКФ определяется на уровне 0,7 от максимума, а на уровне 0,3 от максимума ширина АКФ увеличивается в 2 раза и составит 0,4 мск. Если ширина АКФ на уровне 0,3 составляет 1 мск, то это говорит о том, что нарушена огибающая основного максимума АКФ первого сигнала и имеется перегиб огибающей за счет второго источника шумоизлучения, автокорреляционная функция которого исказила огибающую первого максимума.
, где Β(τ1) - автокорреляционная функция первого процесса, В(τ2) - автокорреляционная функция второго процесса, В(τ3) - автокорреляционная функция третьего процесса (А.М. Заездный «Основы расчетов по статистической радиотехнике», стр. 88). Здесь каждому спектру соответствует своя автокорреляционная функция со своим интервалом корреляции, который определяется шириной спектра, характерного для данного источника шумоизлучения. Наличие одной или нескольких целей в направлении приема может быть определено по искажению ширины и формы огибающей первого максимума АКФ, который соответствует самому широкому спектру. Для этого используется отличие формы огибающей автокорреляционной функции одиночного шумового сигнала от формы огибающей автокорреляционной функции суммы независимых шумовых сигналов по числу перегибов огибающей. Если спектр первого шумового сигнала имеет полосу 5 кГц, то ширина автокорреляционной функции будет равна 0,2 мск. Если ширина спектра второго источника шумоизлучения составляет 1 кГц, то ширина автокорреляционной функции составит 1 мск. Ширина АКФ определяется на уровне 0,7 от максимума, а на уровне 0,3 от максимума ширина АКФ увеличивается в 2 раза и составит 0,4 мск. Если ширина АКФ на уровне 0,3 составляет 1 мск, то это говорит о том, что нарушена огибающая основного максимума АКФ первого сигнала и имеется перегиб огибающей за счет второго источника шумоизлучения, автокорреляционная функция которого исказила огибающую первого максимума.
Известно соотношение, которое определяет давление в точке приема сигнала шумоизлучения, принимаемого одной характеристикой направленности (А.П. Евтютов, В.Б. Митько "Примеры инженерных расчетов в гидроакустике" Ленинград, Судостроение, 1981 г., стр. 106), где показано, что при распространении ширина спектра сигнала изменяется, поэтому на различных дистанциях ширина спектров шумоизлучения объектов будет различной и различной будет ширина огибающей автокорреляционной функции. Таким образом, если на направлении приема расположено несколько целей на различных дистанциях, то при наличии перегибов формы огибающей можно определить число шумящих объектов на направлении приема и проводить классификацию объектов только в том случае, если на направлении приема будет наблюдаться один объект шумоизлучения.
Как показывает опыт работы, ошибка классификации определяется тем, что для принятия решения предъявляются спектры, одновременно принадлежащие нескольким источникам шумоизлучения, что категорически не допускается всеми методами теории распознавания (В.И. Васильев. Распознающие системы. Киев, Наукова думка, 1983 г., Стр. 116).
Сущность изобретения поясняется фиг. 1, где представлена блок-схема, реализующая данный способ;
Устройство, реализующее способ (фиг. 1), содержит последовательно соединенные антенну 1, блок 2 АЦП - аналогово-цифровой преобразователь, блок 3 БПФ спектрального анализа, блок 4 определения взаимных спектров, блок 5 накопления взаимных спектров, блок 6 определения АКФ автокорреляционной функции, блок 7 анализа АКФ, блок 8 определения объектов шумоизлучения, блок 9 классификации, индикатор 11. Второй выход блока 7 анализа АКФ соединен со вторым входом индикатора 11, выход которого передается оператору 10. Решение оператора 10 поступает на второй вход блока 8 и на второй вход блока 9 классификации. Второй выход блока 5 связан с третьим входом блока 9, а второй выход блока 6 - с четвертым входом блока 9.
С помощью рассмотренного устройства предложенный способ реализуется следующим образом.
Акустический сигнал шумоизлучения принимается антенной 1, преобразуется в аналоговый электрический сигнал и передается в блок 2 АЦП, где производится дискретизация принятого электрического сигнала в цифровой код, который используется в дальнейшем для цифровой обработки. Последовательные временные наборы цифровых отсчетов поступают на вход блока 3 БПФ, где производится вычисление спектров набранной временной входной реализации, которые последовательно передаются на блок 4 вычисления взаимного спектра. Измеренные оценки взаимного спектра передаются последовательно в блок 5, где происходит накопление взаимных спектров для повышения отношения сигнал/помеха. Практически эта операция может выполняться непосредственно в блоке 3 БПФ при вычислении спектров входной реализации. Время накопления определяется исходя из уровня изотропной помехи, действующей на входе антенны. Принципы цифрового преобразования и обработки достаточно подробно приведены в работе («Применение цифровой обработки сигналов» п/р Оппенгейма, М., Мир, 1980 г., стр. 389-436). При использовании цифровой техники в качестве спектрального анализа применяют процедуры быстрого преобразования Фурье (БПФ), которые обеспечивают выделение и измерение энергетического спектра шумового электрического процесса. ("Применение цифровой обработки сигналов", М., Мир, 1980 г., стр. 296). В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, которые преобразуют акустический сигнал в цифровой вид и производят в цифровом виде формирование характеристик направленности, многоканальную обработку и обнаружение сигнала, а также измерение спектров сигнала шумоизлучения, автокорреляционную обработку и процедуры анализа спектров. Вопросы реализации спецпроцессоров достаточно подробно рассмотрены в книге Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» Санкт-Петербург, «Наука», 2004 г., стр. 281. С выхода блока 5 накопленные спектры передаются в блок 6 вычисления автокорреляционной функции, который выполнен практически на той же основе, что и блок 3. Выделенная автокорреляционная функция поступает в блок 7 анализа АКФ, где оцениваются параметры функции, выделяется огибающая АКФ и передаются в блок 8 определения числа объектов шумоизлучения и в блок 11 на индикатор для представления информации оператору. Определение числа источников шумоизлучения может происходить либо на основе разработанных алгоритмов, либо оператором на основе визуальной оценки вида автокорреляционной функции и имеющегося опыта работы. Если в блоке 8 принимается решение, что источник входного шума единственный, то передается команда на блок 9 классификации, который выделяет классификационные признаки из накопленных спектров, поступивших из блока 5, либо из блока 6 оценок автокорреляционной функции и при наличии одного источника шумоизлучения производят классификацию шумящего объекта по ширине автокорреляционной функции или по ее несущей частоте. Выработанное в блоке 9 решение передается в блок 11 для представления оператору.
Все изложенное позволяет считать задачу изобретения решенной.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2013 |
|
RU2559310C2 |
| Способ классификации, определения координат и параметров движения шумящего в море объекта в инфразвуковом диапазоне частот | 2019 |
|
RU2718144C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОБЪЕКТА ПО ЕГО ШУМОИЗЛУЧЕНИЮ | 2015 |
|
RU2593622C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОАКУСТИЧЕСКОГО СИГНАЛА ШУМОИЗЛУЧЕНИЯ ОБЪЕКТА | 2014 |
|
RU2555194C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ ДО ШУМЯЩЕГО ОБЪЕКТА | 2014 |
|
RU2550576C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ ОБЪЕКТОВ | 1995 |
|
RU2110810C1 |
| СПОСОБ ИЗМЕРЕНИЯ ОТНОШЕНИЯ СИГНАЛ-ПОМЕХА | 2011 |
|
RU2466416C1 |
| Способ распознавания гидроакустических шумов морских объектов | 2023 |
|
RU2841513C2 |
| СПОСОБ КЛАССИФИКАЦИИ ШУМЯЩИХ ОБЪЕКТОВ | 2003 |
|
RU2262121C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОБЪЕКТА | 2001 |
|
RU2191405C1 |
Изобретение относится к области гидроакустики и может быть использовано для разработки систем классификации, использующих спектральные и корреляционные признаки. Технический результат заключается в повышении вероятности правильной классификации обнаруженных источников шумоизлучения. Способ классификации шумящих объектов содержит прием сигналов шумоизлучения, спектральный анализ принятых сигналов шумоизлучения, определение взаимного спектра, определение автокорреляционной функции, прием сигнала шумоизлучения производится одной антенной, осуществляется последовательный набор временных реализаций, осуществляется выделение взаимного спектра между последовательными наборами временных реализаций, производится накопление выделенных последовательных взаимных спектров, определяется автокорреляционная функция от накопленного взаимного спектра, определяется количество источников шумоизлучения по виду автокорреляционной функции и при наличии одного источника шумоизлучения производится классификация шумящего объекта по используемым классификационным признакам. 1 ил.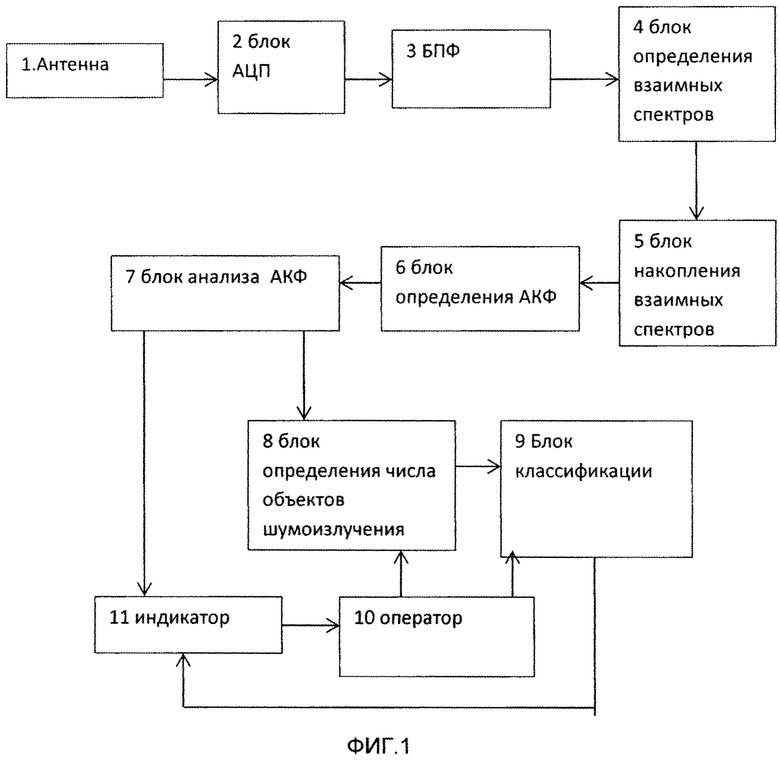
Способ классификации шумящих объектов, содержащий прием сигналов шумоизлучения, спектральный анализ принятых сигналов шумоизлучения, определение взаимного спектра, определение автокорреляционной функции, отличающийся тем, что прием сигнала шумоизлучения производят одной антенной, осуществляют последовательный набор временных реализаций, осуществляют выделение взаимного спектра между последовательными наборами временных реализаций, производят накопление выделенных последовательных взаимных спектров, определяют автокорреляционную функцию от накопленного взаимного спектра, определяют количество источников шумоизлучения по виду автокорреляционной функции, и при наличии одного источника шумоизлучения по числу перегибов автокорреляционной функции, и при отсутствии перегибов, т.е. при наличии одного источника шумоизлучения производят классификацию шумящего объекта по ширине автокорреляционной функции или по ее несущей частоте.
| СПОСОБ КЛАССИФИКАЦИИ ШУМЯЩИХ ОБЪЕКТОВ | 2003 |
|
RU2262121C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ ОБЪЕКТОВ | 1995 |
|
RU2110810C1 |
| US 5583505 A1, 10.12.1996 | |||
| WO 1997042520 A1, 13.11.1997. | |||

