Изобретение относится к области гидроакустики и может быть использовано для разработки систем классификации, определения координат и параметров движения шумящих в море объектов в инфразвуковом диапазоне частот.
Известен способ определения дистанции до шумящего в море объекта в пассивном режиме (патент РФ №2559310, МПК G01S, 3/80, (2006/01), опубликован 10.08.2015 г., бюл. №22), в котором принимают сигналы шумоизлучения половинами гидроакустической приемной антенной, выполняют спектральный анализ принятых сигналов, измеряют взаимные спектры сигналов, принятых половинами гидроакустической антенны, измеряют автокорреляционную функцию (АКФ), измеряют ширину автокорреляционной функции ΔТизм., определяют калибровочный коэффициент М=(Д/ΔТ)изв, где Дизв. - известная дистанция обнаружения цели фиксированной шумности с известным спадом спектра, ΔТизв - ширина основного максимума АКФ, соответствующего известной дистанции, определяют дистанцию до цели по формуле Д=ΔТизмМ.
Недостатком данного способа является необходимость наличия двух половин одной приемной антенны, что снижает ее энергетический потенциал, а также большая погрешность определения дистанции до шумящего объекта при наличии шумов ближнего судоходства, которые искажают форму АКФ.
Известен также способ классификации шумящих объектов в пассивном режиме (патент РФ №2570430, МПК G01S, 3/80, (2006/01), опубликован 10.12.2015 г., бюл. №34), в котором принимают сигналы шумоизлучения одной гидроакустической приемной антенной, осуществляют последовательный набор временных реализаций, выполняют спектральный анализ принятых сигналов, измеряют взаимные спектры между каждыми, следующими друг за другом, последовательными наборами временных реализаций, производят накопление выделенных последовательных взаимных спектров, определяют автокорреляционную функцию (АКФ) от накопленного взаимного спектра, определяют количество источников шумоизлучения по виду автокорреляционной функции и при наличии одного источника шумоизлучения производят классификацию шумящего объекта по ширине автокорреляционной функции или по ее несущей частоте. Данное изобретение является наиболее близким к заявленному изобретению, т.е. является прототипом.
Недостатком этого изобретения является малая вероятность правильной классификации шумящего объекта при наличии шумов ближнего судоходства, которые искажают форму АКФ, а также невозможность более полной классификации шумящего объекта, которая включала бы классификацию объектов на надводные и подводные, классификацию по скорости движения объекта и по его координатам в инфразвуковом диапазоне частот.
Задачей, на решение которой направлено данное изобретение, является увеличение помехоустойчивости приемной гидроакустической антенны при наличии шумов ближнего судоходства, увеличение числа классификационных признаков шумящего объекта и вероятности правильной классификации, а также уменьшение погрешности определения координат и параметров движения шумящего объекта в инфразвуковом диапазоне частот.
Для решения этой задачи в заявленном способе классификации, определения координат и параметров движения шумящего в море объекта в инфразвуковом диапазоне частот, включающем прием гидроакустического шумового сигнала гидроакустической приемной антенной, сопровождение шумящего объекта, спектральный анализ сигнала в широкой полосе частот, измерение взаимного спектра между гидроакустическими шумовыми сигналами, принятыми гидроакустической приемной антенной, накопление взаимных спектров и классификацию шумящего объекта, введены новые признаки, а именно: в качестве гидроакустической приемной антенны используют скалярно - векторный комбинированный приемник градиента давления, формируют спектры суммарного процесса сигнал плюс помеха S+N для полного набора 16 информативных параметров, характеризующих звуковое поле, формируют спектры помехи N для полного набора 16 информативных параметров, формируют отношение сигнал-помеха S/N для полного набора 16 информативных параметров, выбирают в компараторе дискретные составляющие, которым соответствуют максимальные значения отношения S/N из 16 возможных, определяют на сонограмме, построенной на выходе компаратора, гармонический ряд лопастных частот fmax(nК), n=1, 2, 3 и т.д., К - предполагаемое число лопастей винта, которым соответствуют максимальные значения отношения S/N, а минимальную из них принимают за первую лопастную частоту fл(К), находят в спектре сигнала на выходе компаратора минимальную разностную частоту f(nК)- f(nК-1), которую принимают за первую вальную частоту f1=f(nК)-f(nК-1), n=1, 2, 3 и т.д., определяют значение числа лопастей винта К по формуле К=fл/f1, определяют число оборотов в минуту на валу N4=60f1, определяют калибровочный коэффициент M=(v/N1K)изв, где v - скорость известного объекта, N1, K - число оборотов в минуту на валу и число лопастей винта известного объекта, определяют скорость шумящего объекта по формуле v=MN1K, где N1, K - число оборотов в минуту на валу и число лопастей винта шумящего объекта, определяют на сонограмме, построенной на выходе компаратора, значение инварианта по формуле

где f - текущее значение частоты максимума спектральной плотности мощности на сонограмме, построенной на выходе компаратора, Δf=f1 - изменение частоты максимума при движении шумящего объекта, t - текущее значение времени сопровождения шумящего объекта, tтр - момент времени, соответствующий траверзу, Δt изменение времени, соответствующее изменению частоты максимума спектральной плотности мощности на сонограмме на величину Δf=f1, и если инвариант принимает отрицательные значения, классифицируют шумящий объект как подводный объект, измеряют величины приращения компонент вектора интенсивности ΔIx, ΔIy по формулам
ΔIx=Ix(t-tтр+Δt)-Ix(t-tтр), ΔIy=Iy(t-tтр+Δt)-Iy(t-tтр),
определяют текущие значения дистанции до шумящего объекта D(t) и пеленга на шумящий объект ϕ(t) по формулам


Технический результат заявленного способа заключается в том, что оп позволяет значительно увеличить помехоустойчивость приемной антенны в инфразвуковом диапазоне частот без увеличения ее апертуры, а только за счет увеличения числа информативных параметров, максимальное число которых равно 16, и повысить отношение сигнал-помеха на выходе компаратора. В свою очередь, увеличение числа информативных параметров позволяет увеличить вероятность правильной классификации шумящего объекта в инфразвуковом диапазоне частот путем измерения числа оборотов в минуту гребного вала, числа лопастей винта шумящего объекта, а также скорости его движения. Кроме того, анализ сонограммы, измеренной на выходе компаратора, позволяет оценить инвариант интерференционной структуры и его знак. (Акустика океана. Современное состояние. М. Наука. 1982. С. 71-91.) В свою очередь, информация о знаке инварианта позволяет выполнить дихотомическую классификацию шумящих объектов на надводные и подводные, а также уменьшить погрешность определения координат и параметров движения шумящего объекта.
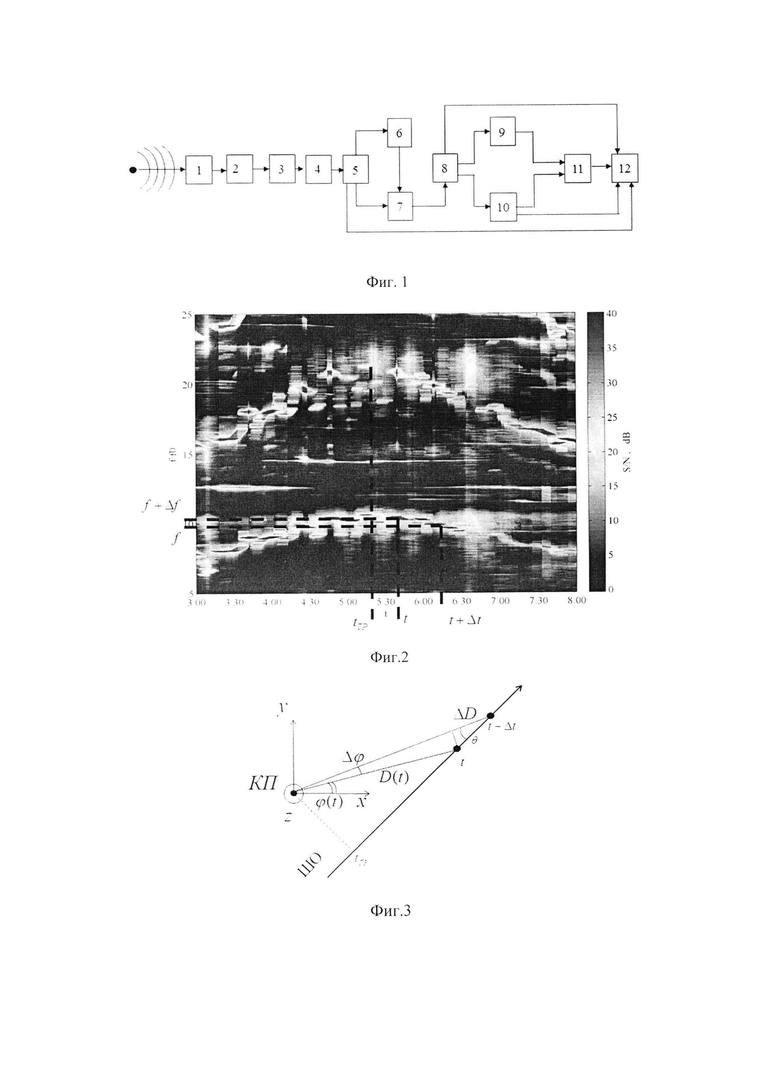
Сущность заявленного изобретения поясняются чертежами, где на фиг. 1 представлена блок схема устройства, реализующего способ; на фиг. 2 представлена 3D сонограмма звукового поля шумящего в море объекта в координатах частота - время наблюдения объекта - отношение S/N на выходе компаратора; на фиг. 3 представлена геометрия движения шумящего объекта относительно комбинированного приемника.
На чертежах обозначены следующие элементы:
1 - комбинированный приемник;
2 - 4-х канальный полосовой фильтр;
3 - 4-х канальный аналого-цифровой преобразователь;
4 - анализатор спектра;
5 - формирователь спектров суммарного процесса сигнал + помеха (S+N) для полного набора информативных параметров;
6 - формирователь спектра помехи N;
7 - формирователь отношения сигнал-помеха (S/N) по всем информативным параметрам;
8 - компаратор;
9 - блок выделения ряда гармоник fmax (nK);
10 - блок выделения разностных частот f(nK)-f(nК-1);
11 - блок определения скорости движения шумящего объекта;
12 - блок классификации и определения координат и параметров движения цели.
Заявленный способ классификации, определения координат и параметров движения шумящего в море объекта в инфразвуковом диапазоне частот реализуется следующим образом.
Звуковой сигнал от шумящего объекта принимается комбинированным приемником 1, с выхода которого сигнал поступает на вход 4-х канального полосового фильтра 2 и далее на вход 4-х канального аналогово-цифрового преобразователя 3. С выхода аналогово-цифрового преобразователя 3 сигналы в цифровом виде поступают на вход анализатора 4 спектра, в котором на основе БПФ находятся текущие спектры звукового давления р(ω)=p1(ω)+ip2(ω) и трех компонент вектора градиента давления g(ω)=g1(ω)+ig2(ω). Сигналы с выхода анализатора 4 спектра поступают на вход формирователя 5 спектров суммарного процесса сигнал плюс помеха (S+N) для полного набора информативных параметров, число которых равно 16, характеризующих звуковое поле шумящего объекта в скалярно -векторном описании.
А1=р2, А2=I1x, А3=I1y, A4=I1z, А5=I2x, А6=I2y, А7=I2z, A8=rotxI, A9=rotyI, A10=rotzI, A11=g1x2, A12=g1y2, A13=g1z2, A14=g2x2, A15=g2y2, A16=g2z2, где I=I1+I2 - комплексный вектор интенсивности, компоненты которого находятся по хорошо известным формулам (Щуров В.А. Векторная акустика океана. Владивосток: Дальнаука, 2003. с. 14-25.) через компоненты комплексного звукового давления и компоненты комплексного вектора градиента давления. Сигналы с первого выхода формирователя 5 спектра суммарного процесса S+N для полного набора информативных параметров поступают на вход формирователя 6 спектра помехи N для полного набора информативных параметров в соответствии с алгоритмом усреднения спектра суммарного процесса S+N окном Хэмминга
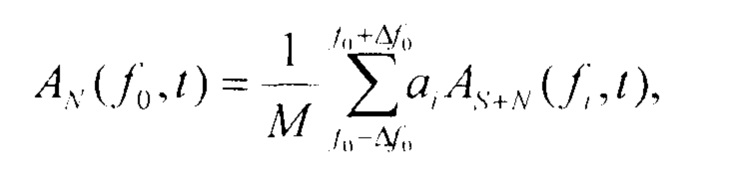

где 2Δƒ0 - ширина окна Хэмминга, ƒ0 - средняя частота дискретной составляющей вально-лопастного звукоряда, Δƒ0 - варьируемый параметр, примерно на порядок превышающий ширину дискретной составляющей Δƒ в спектре суммарного процесса (сигнал плюс шум).
С выхода формирователя 6 спектра помехи N и второго выхода формирователя 5 спектра суммарного процесса S+N сигналы поступают на вход формирователя 7 отношения сигнал - помеха (S/N) по всем информативным параметрам. Сформированные в блоке 7 отношения S/N по всем информативным параметрам поступают в компаратор 8, выбирающий спектральную составляющую, которой соответствует максимальное отношение S/N, увеличивая тем самым помехоустойчивость приемной системы и вероятность правильного обнаружения спектральных составляющих на фоне помехи. Повышенная вероятность правильного определения полного набора дискретных составляющих вально-лопастного звукоряда позволяет определить по сонограмме, построенной на выходе компаратора, инвариант интерференционной структуры. С выхода компаратора 8 сигналы поступают в блок 9 выделения ряда гармоник fmax(nК), которым соответствуют максимальные отношения S/N, и которые принимаются за лопастные частоты fл(К), fл(2К), fл(3К), и т.д., а минимальную из них принимают за первую лопастную частоту fл(К). Со второго выхода компаратора 8 сигналы поступают в блок 10 выделения разностных частот f(nК)-f(nК-1), а минимальную разностную частоту f(nК)-f(nК-1), принимают за первую вальную частоту f1=f(nК)-f(nК-1), n=1, 2, 3 и т.д.. С выхода блока 9 выделения первой лопастной частоты и блока 10 выделения первой вальной частоты сигналы поступают в блок 11 определения скорости движения шумящего объекта. В этом блоке определяют число оборотов в минуту гребного вала N1=60f1 и значение числа лопастей винта по формуле К=fл/f1, определяют калибровочный коэффициент M=(v/N1K)изв, где v - скорость известного объекта, N1, K - число оборотов в минуту на валу и число лопастей винта известного объекта, определяют скорость шумящего объекта по формуле v=MN1K, где N1, K - число оборотов в минуту на валу и число лопастей винта шумящего объекта. С выхода блока 11, со второго выхода блока 5, с третьего выхода блока 8 и со второго выхода блока 10 сигналы поступают в блок 12 классификации и определения координат и параметров движения цели. В этом блоке по измеренной в блоке 11 скорости движения шумящего объекта, по измеренным в блоке 5 компонентам вектора интенсивности, по измеренной в блоке 10 первой вальной частоте и по измеренному в блоке 8 инварианту определяют текущий пеленг на шумящий объект и текущую дистанцию по формулам (1)-(2).
3D сонограмма звукового поля шумящего в море объекта в координатах частота - время наблюдения объекта - отношение S/N на выходе компаратора показана на фиг. 2, на которой изображены изолинии равной интенсивности, сформированные на множестве дискретных составляющих вально-лопастного звукоряда. В случае, если звуковое поле сформировано шумами обтекания звукового диапазона или дискретными составляющими надводного судна, инвариант принимает положительные значения. В этом случае изолинии равной интенсивности на сонограмме вогнуты подошвой вниз в точке траверза. В случае, если звуковое поле сформировано дискретными составляющими подводного объекта, которые хорошо возбуждают пограничные волны на границе раздела вода - морское дно, инвариант принимает отрицательные значения. В этом случае изолинии равной интенсивности на сонограмме выгнуты подошвой вверх в точке траверза, как изображено на фиг. 2. Для использования этой особенности интерференционной структуры звукового поля инфразвукового диапазона определяют на сонограмме, построенной на выходе компаратора, значение инварианта по формуле (1), и если инвариант принимает отрицательные значения, классифицируют шумящий объект как подводный объект.
На фиг. 3 представлена геометрия движения шумящего объекта относительно комбинированного приемника. На чертеже изображены донный комбинированный приемник (КП) с локальной системой координат (x,y,z), траектория движения шумящего объекта (ШО), на которой отмечена точка траверза tтр, текущая дистанция до шумящего объекта D(t) и текущий пеленг на шумящий объект ϕ(t).
Изобретение относится к области гидроакустики и может быть использовано для разработки систем классификации, определения координат и параметров движения шумящих в море объектов в инфразвуковом диапазоне частот. Технический результат заключается в увеличении помехоустойчивости приемной гидроакустической антенны при наличии шумов ближнего судоходства, в повышении вероятности правильной классификации и уменьшении погрешности определения координат и параметров движения шумящих в море объектов в пассивном режиме. Способ классификации, определения координат и параметров движения шумящих в море объектов включает в себя прием сигналов шумоизлучения гидроакустическим комбинированным приемником, спектральный анализ принятых сигналов, определение взаимных и автоспектров для 16 информативных параметров, составляющих полное описание звукового поля с использованием скалярных, векторных и тензорных величин, построение сонограммы звукового поля на выходе компаратора, выбирающего в текущем наборе взаимных и автоспектров информативный параметр, которому соответствует максимальное отношение сигнал-помеха, определение на сонограмме первой лопастной и первой вальной частоты вально-лопастного звукоряда, определение числа оборотов на валу и числа лопастей винта, определение калибровочного коэффициента M==(v/N1K)изв, где v - скорость известного объекта, N4, K - число оборотов в минуту на валу и число лопастей винта известного объекта, определение скорости шумящего объекта по формуле v=MN1K, где N1, K - число оборотов в минуту на валу и число лопастей винта шумящего объекта, определение по сонограмме инварианта интерференционной структуры, и в случае, если инвариант принимает отрицательные значения, классифицируют шумящий объект как подводный объект, определение пеленга на шумящий объект с использованием горизонтальных компонент вектора интенсивности, определение дистанции до шумящего объекта с использованием инварианта, скорости объекта и информации об угловом положении траектории движения шумящего объекта относительно комбинированного приемника. 3 ил.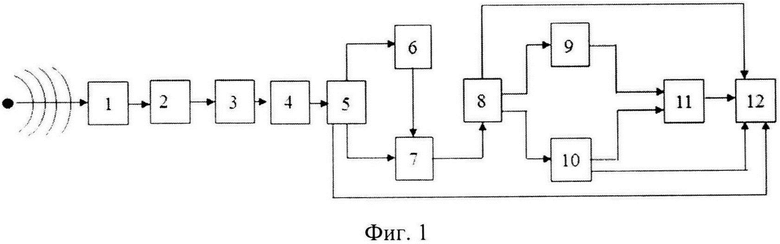
Способ классификации, определения координат и параметров движения шумящего в море объекта в инфразвуковом диапазоне частот, включающий прием гидроакустического шумового сигнала гидроакустической приемной антенной, сопровождение шумящего объекта, спектральный анализ сигнала в широкой полосе частот, измерение взаимного спектра между гидроакустическими шумовыми сигналами, принятыми гидроакустической приемной антенной, накопление взаимных спектров, и классификацию шумящего объекта, отличающийся тем, что в качестве гидроакустической приемной антенны используют скалярно-векторный комбинированный приемник градиента давления, формируют спектры суммарного процесса сигнал плюс помеха S+N для полного набора 16 информативных параметров, характеризующих звуковое поле, формируют спектры помехи N для полного набора 16 информативных параметров, формируют отношение сигнал-помеха (S/N) для полного набора 16 информативных параметров, выбирают в компараторе дискретные составляющие, которым соответствуют максимальные значения отношения S/N из 16 возможных, определяют на сонограмме, построенной на выходе компаратора, гармонический ряд лопастных частот fmax(nК), n=1, 2, 3 и т.д., К - предполагаемое число лопастей винта, которым соответствуют максимальные значения отношения S/N, а минимальную из них принимают за первую лопастную частоту fл(К), находят в спектре сигнала на выходе компаратора минимальную разностную частоту f(nК)-f(nК-1), которую принимают за первую вальную частоту f1=f(nК)-f(nК-1), n=1, 2, 3 и т.д., определяют значение числа лопастей винта К по формуле К=fл/ f1, определяют число оборотов в минуту гребного вала N1=60f1, определяют калибровочный коэффициент M=(v/N1K)изв, где v - скорость известного объекта, N1, K - число оборотов в минуту на валу и число лопастей винта известного объекта, определяют скорость шумящего объекта по формуле v=MN1K, где N1, K - число оборотов в минуту гребного вала и число лопастей винта шумящего объекта соответственно, определяют по сонограмме, построенной на выходе компаратора, значение инварианта по формуле
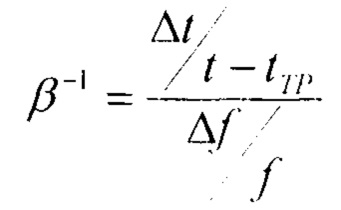
где f - текущее значение частоты максимума спектральной плотности мощности на сонограмме, построенной на выходе компаратора, Δf=f1 - изменение частоты максимума при движении шумящего объекта, t - текущее значение времени сопровождения шумящего объекта, tтр - момент времени, соответствующий траверзу, Δt изменение времени, соответствующее изменению частоты максимума спектральной плотности мощности на сонограмме на величину Δf=f1, и, если инвариант принимает отрицательные значения, классифицируют шумящий объект как подводный объект, измеряют величины приращения компонент вектора интенсивности ΔIx, ΔIy по формулам
ΔIx=Ix(t-tтр+Δt)-Ix(t-tтр), ΔIy=Iy(t-tтр+Δt)-Iy(t-tтр),
определяют текущие значения дистанции до шумящего объекта D(t) и пеленга на шумящий объект ϕ(t) по формулам


| СПОСОБ ОЦЕНКИ КОЛИЧЕСТВА ЛОПАСТЕЙ ВИНТА ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2013 |
|
RU2581719C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ ДО ШУМЯЩЕГО ОБЪЕКТА | 2014 |
|
RU2550576C1 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ | 2015 |
|
RU2590933C1 |
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2015 |
|
RU2602732C1 |
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2015 |
|
RU2603886C1 |
| СПОСОБ КЛАССИФИКАЦИИ ШУМЯЩИХ ОБЪЕКТОВ | 2014 |
|
RU2570430C1 |
| US 4200871 A1, 29.04.1980. | |||

