Изобретение относится к деталям машин и может быть использовано в составе изделий авиационной и ракетной техники.
Известен привод, содержащий корпус, установленный в нем моментный электродвигатель с кольцевым ротором, плату, установленную на статоре электродвигателя, редуктор, выходной вал, установленный в подшипниках корпуса, и датчик положения [1]. Недостатком этого привода является сложность управления моментным электродвигателем, что требует использования специального прибора управления, переключающего обмотки моментного электродвигателя.
Этого недостатка лишен привод, содержащий корпус, установленный внутри него электродвигатель с входным валом, связанный с последним через редуктор выходной вал, установленный в подшипниках в корпусе, и датчик положения с шестерней, введенной в зацепление с зубчатым колесом, выбранный в качестве прототипа [2]. Применение электродвигателя традиционной конструкции позволяет существенно упростить управление приводом.
Недостатком такого привода является значительные радиальные габариты и масса, что обусловлено размещением электродвигателя, редуктора и датчика положения на корпусе. В условиях авиационной и особенно ракетной техники наличие избыточной массы и габаритов крайне нежелательно, что объясняется малыми располагаемыми для размещения агрегатов объемами и высокой удельной стоимостью вывода груза на орбиту. Другим недостатком конструкции прототипа является низкая технологичность корпуса привода, имеющего сложную пространственную форму и весьма трудоемкого в изготовлении.
Техническим результатом, достигаемым с помощью заявленного изобретения, является снижение радиальных габаритов и массы и повышение технологичности.
Этот результат достигается за счет того, что в известном приводе, содержащем корпус, установленный внутри него электродвигатель с входным валом, связанный с входным валом через редуктор выходной вал, установленный в подшипниках в корпусе, и датчик положения с шестерней, введенной в зацепление с зубчатым колесом, согласно изобретению выходной вал снабжен размещенным между его подшипниками барабаном, внутри которого выполнена цилиндрическая полость, электродвигатель установлен на одной торцевой стенке барабана в его полости, а датчик положения установлен на другой торцевой стенке барабана в его полости, в выходном валу выполнено сквозное аксиальное отверстие под провода электрической коммутации электродвигателя и датчика положения, а на цилиндрической стенке барабана выполнены пазы под установку электродвигателя и датчика положения, при этом введенное в зацепление с шестерней датчика положения зубчатое колесо выполнено с внутренним зацеплением и установлено на корпусе, который снабжен также неподвижным зубчатым колесом внутреннего зацепления, введенным в зацепление с выходной шестерней редуктора, размещенного в торцевой стенке барабана, на которой установлен электродвигатель.
На иллюстрации приведен пример конкретного выполнения привода, продольный разрез.
Привод содержит корпус 1, установленный внутри него электродвигатель 2 с входным валом 3, связанный с последним через редуктор 4 выходной вал 5, установленный в подшипниках 6 в корпусе 1. Внутри корпуса 1 установлен датчик положения 7 с установленной на его валу шестерней 8, введенной в зацепление с зубчатым колесом 9, установленным на корпусе. Выходной вал 5 снабжен размещенным между его подшипниками 6 барабаном 10, внутри которого выполнена цилиндрическая полость 11. Электродвигатель 2 установлен на одной торцевой стенке 12 барабана 10 в его полости 11, а датчик положения 7 установлен на другой торцевой стенке 13 барабана 10 в его полости 11. В выходном валу 5 выполнено сквозное аксиальное отверстие 14 под провода 15 электрической коммутации электродвигателя и датчика положения, а на цилиндрической стенке 16 барабана 10 выполнены пазы 17 и 18 под установку электродвигателя 2 и датчика положения 7. Введенное в зацепление с шестерней 8 датчика положения 7 зубчатое колесо 9 выполнено с внутренним зацеплением и установлено на корпусе 1, который снабжен также неподвижным зубчатым колесом 19 внутреннего зацепления, введенным в зацепление с выходной шестерней 20 редуктора 4, размещенного в торцевой стенке 12 барабана 10, на которой установлен электродвигатель 2.
Привод работает следующим образом. При включении электродвигателя 2 вращение входного вала 3 передается на редуктор 4. Вращение выходной шестерни 20 редуктора 4, введенной в зацепление с установленным на корпусе 1 неподвижным зубчатым колесом 19 внутреннего зацепления, приводит к вращению барабана 10 и, соответственно, выходного вала 5. При этом вместе с выходным валом 5 вращаются и электродвигатель 2 и датчик положения 7, установленные на торцовых стенках барабана 10. Вращение датчика положения 7 приводит к изменению положения введенной в зацепление с установленным на корпусе 1 зубчатым колесом 9 шестерни 8 относительно корпуса датчика положения 7, что приводит к изменению величины сигнала, вырабатываемого датчиком положения 7. Провода 15 электрической коммутации электродвигателя и датчика положения размещены в аксиальном отверстии 14. При этом провода 15, проходящие внутри отверстия 14 и закрепленные неподвижно на электродвигателе 2 и датчике положения 7, испытывают скручивание на величину, равную углу поворота выходного вала 5. Поскольку в агрегатах космической техники этот угол невелик - обычно не более 180°, длина проводов 15 значительна, а жесткость проводов на кручение мала, то деформации поворота проводов весьма незначительны, находятся в пределах упругой деформации и не приводят к нарушению их целостности. Пазы 17 и 18 позволяют установить электродвигатель 2 и датчик положения 7 внутри полости 11 барабана 10. При этом за счет значительного диаметра цилиндрической стенки 16 барабана 10 она обладает большим моментом сопротивления изгибу и кручению и значительным запасом прочности, что не повышает уровень напряжений в конструкции по сравнению с прототипом даже при наличии ослабляющих сечение барабана 10 пазов 17 и 18. Совокупность всех указанных существенных признаков позволяет существенно уменьшить внутренний диаметр корпуса 1 до минимально возможной величины, равной сумме диаметров электродвигателя и датчика положения, при сохранении осевых габаритов, и за счет этого снизить массу. По предварительным расчетам снижение массы составляет около 20%. Помимо этого, существенно повышается технологичность за счет упрощения конструкции корпуса.
Указанные результаты позволяют рекомендовать заявленный привод к использованию в агрегатах авиационной и космической техники.
Литература
1. Патент Российской федерации №1754990 по кл. F 16 H 1/48, 1992 г.
2. «Атлас конструкций элементов приборных устройств». М., «Машиностроение», 1982, стр.108. - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕРМЕТИЧНЫЙ ПОВОРОТНЫЙ МЕХАНИЗМ | 2004 |
|
RU2282920C2 |
| УСТРОЙСТВО ДЕЛЕНИЯ ПОТОКА ЖИДКОСТИ | 2021 |
|
RU2771472C1 |
| ЭЛЕКТРОПРИВОД | 2015 |
|
RU2624886C2 |
| ЭЛЕКТРОПРИВОД | 2013 |
|
RU2543452C1 |
| УСТРОЙСТВО ДЕЛЕНИЯ ПОТОКА ЖИДКОСТИ | 2022 |
|
RU2808161C1 |
| СТИРАЛЬНО-ОТЖИМНАЯ МАШИНА | 1995 |
|
RU2109096C1 |
| ВОЛНОВОЙ ПРИВОД | 2003 |
|
RU2266451C2 |
| ВОЛНОВОЙ ПРИВОД | 2004 |
|
RU2280798C2 |
| ЭЛЕКТРОПРИВОД | 2002 |
|
RU2216667C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2672150C1 |
Изобретение относится к машиностроению, в частности к деталям машин, и может быть использовано в составе изделий авиационной и ракетной техники. Привод содержит корпус 1, установленный внутри него электродвигатель 2 с входным валом 3, редуктор 4, выходной вал 5 с барабаном 10, датчик положения 7 с шестерней 8. Внутри барабана 10 выполнена цилиндрическая полость. Электродвигатель 2 установлен на одной торцевой стенке барабана 10 в его полости, а датчик положения 7 установлен на другой торцевой стенке барабана в его полости. В выходном валу 5 выполнено сквозное аксиальное отверстие 14 под провода электрической коммутации электродвигателя и датчика положения. На цилиндрической стенке 16 барабана 10 выполнены пазы 17 и 18 под установку электродвигателя и датчика положения. Введенное в зацепление с шестерней 8 датчика положения 7 зубчатое колесо 9 выполнено с внутренним зацеплением и установлено на корпусе 1. Неподвижное зубчатое колесо 19 внутреннего зацепления зацеплено с выходной шестерней 20 редуктора 4. Технический результат - снижение радиальных габаритов и массы и повышение технологичности. 1 ил.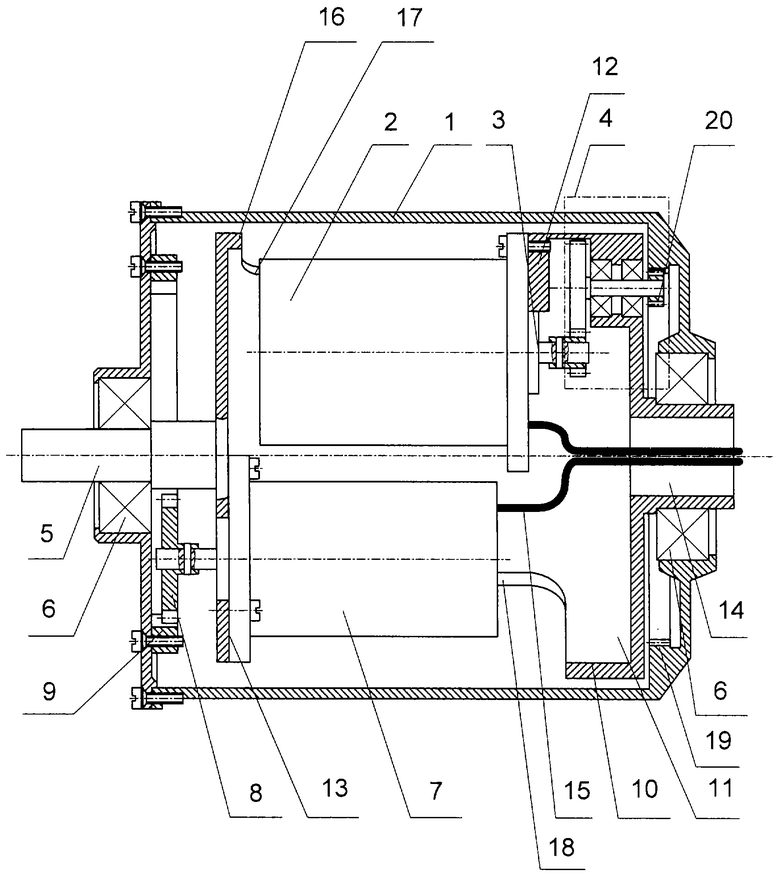
Привод, содержащий корпус, установленный внутри него электродвигатель с входным валом, связанный с входным валом через редуктор выходной вал, установленный в подшипниках в корпусе, и датчик положения с шестерней, введенной в зацепление с зубчатым колесом, отличающийся тем, что выходной вал снабжен размещенным между его подшипниками барабаном, внутри которого выполнена цилиндрическая полость, электродвигатель установлен на одной торцевой стенке барабана в его полости, а датчик положения установлен на другой торцевой стенке барабана в его полости, в выходном валу выполнено сквозное аксиальное отверстие под провода электрической коммутации электродвигателя и датчика положения, а на цилиндрической стенке барабана выполнены пазы под установку электродвигателя и датчика положения, при этом введенное в зацепление с шестерней датчика положения зубчатое колесо выполнено с внутренним зацеплением и установлено на корпусе, который снабжен также неподвижным зубчатым колесом внутреннего зацепления, введенным в зацепление с выходной шестерней редуктора, размещенного в торцевой стенке барабана, на которой установлен электродвигатель.
| Атлас конструкций элементов приборных устройств | |||
| - М.: Машиностроение, 1982, с.108 | |||
| Планетарный привод | 1990 |
|
SU1754990A1 |
| ПЛАНЕТАРНЫЙ ПРИВОД | 1991 |
|
RU2011065C1 |

