Изобретение относится к деталям машин и может быть использовано в качестве приводов автоматики изделий авиационной и ракетной техники.
Известен электропривод, содержащий корпус, установленные внутри него на двух подшипниках выходной вал и электродвигатель, а также волновую зубчатую передачу, жесткое колесо которой жестко связано с выходным валом, генератор воли, установленный на выходном валу, связанный с электродвигателем через промежуточную передачу (патент РФ №2136986, МПК F16H 1/00, 1999 г.). Недостатком такого электропривода является его низкая вибропрочность из-за значительных осевых габаритов.
Этого недостатка лишен электропривод, содержащий корпус, установленные внутри него на плате электродвигатель и датчик углового положения выходного вала, а также редуктор, выходное звено которого жестко связано с выходным валом, а входное звено введено в зацепление со смонтированной на валу электродвигателя шестерней, причем выходной вал установлен на подшипниках в корпусе и плате, выбранный в качестве прототипа (патент РФ №2280798, МПК F16H 57/02, 2006 г.). Датчик углового положения выходного вала связан с выходным валом через отсчетную зубчатую передачу.
Недостатками такого электропривода являются сложность его конструкции и значительные радиальные габариты и масса, что вызвано наличием в его конструкции специальной отсчетной зубчатой передачи.
Техническим результатом, решаемым заявленным изобретением, является упрощение конструкции и снижение радиальных габаритов и массы.
Технический результат достигается за счет того, что в электроприводе, содержащем корпус, установленные внутри него на плате электродвигатель и датчик углового положения, связанный с выходным валом электропривода, а также редуктор, выходной вал которого является выходным валом электропривода, а входное звено введено в зацепление со смонтированной на валу электродвигателя шестерней, причем выходной вал установлен на подшипниках в корпусе и плате, согласно изобретению, выходное звено редуктора выполнено в виде жестко связанного с выходным валом зубчатого колеса, введенного в зацепление с шестерней предпоследнего вала редуктора, который выполнен полым, датчик углового положения установлен соосно предпоследнему валу редуктора и связан с ним посредством компенсирующей муфты, размещенной в полости предпоследнего вала редуктора, а передаточное отношение от шестерни к зубчатому колесу должно быть равно
i=А/В, где:
A - рабочий диапазон датчика углового положения,
B - диапазон углового перемещения выходного вала.
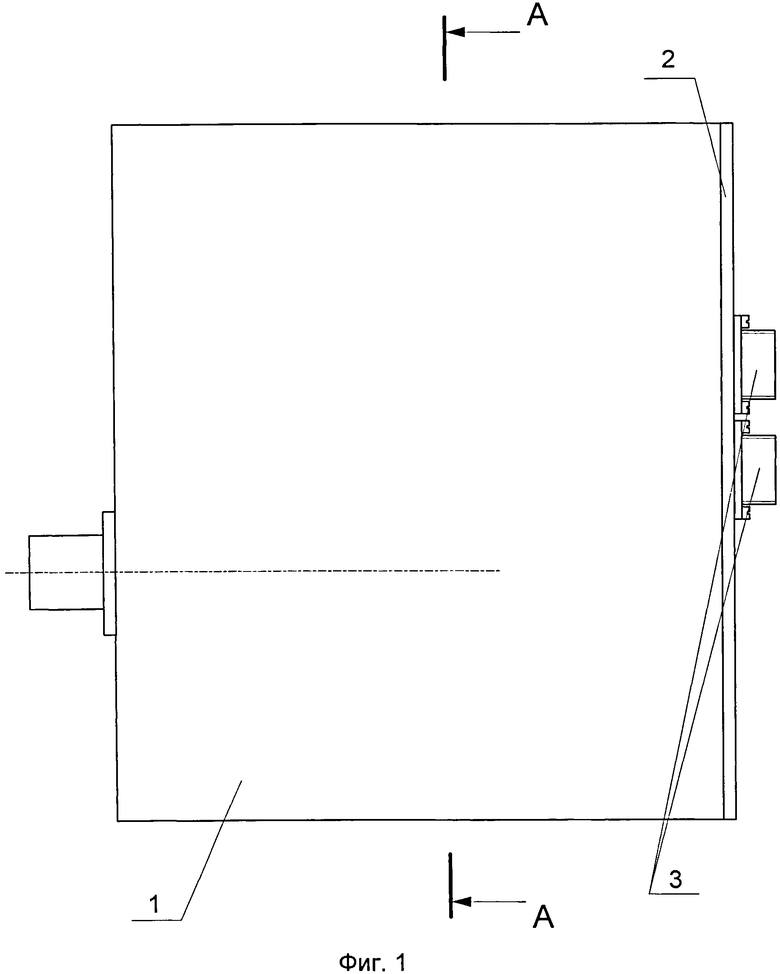
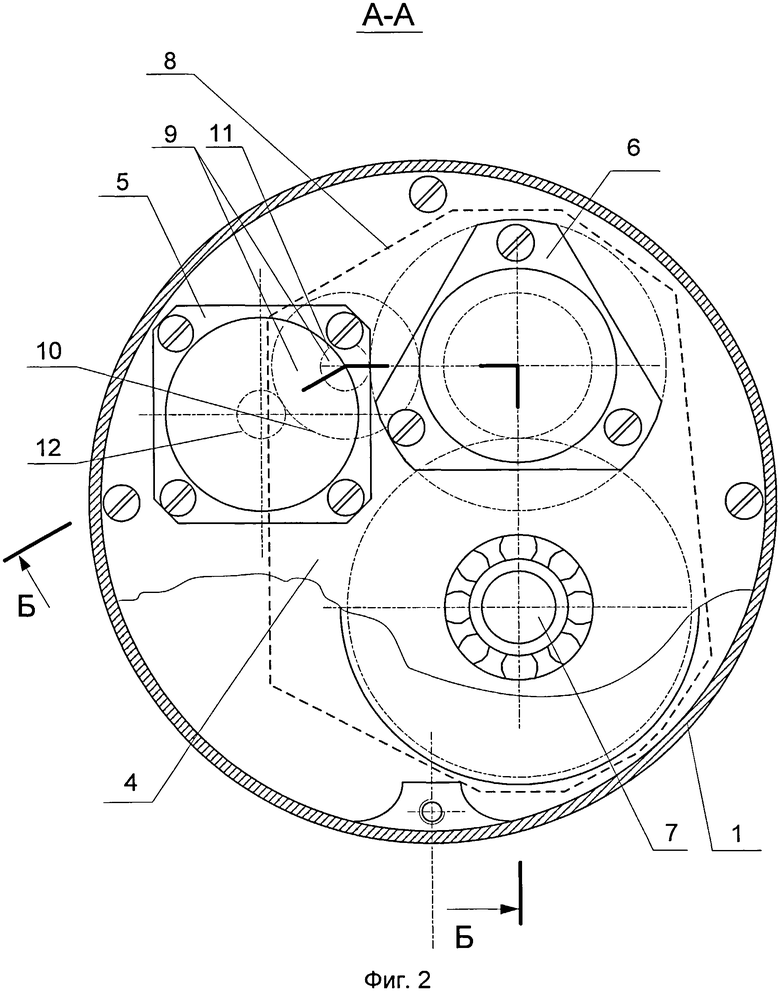
На фиг.1 приведен пример конкретного исполнения электропривода, фронтальный вид, на фиг.2 - то же, поперечный разрез - разрез по А-А, на фиг.3 - то же, ломаный разрез по Б-Б. На фиг.2 и 3 электродвигатель и датчик углового положения условно показаны нерассеченными.
Электропривод содержит корпус 1, закрытый крышкой 2, на которой установлены электросоединители 3 от размещенных внутри корпуса 1 электрорадиоэлементов электропривода. Внутри корпуса 1 установлены на плате 4 электродвигатель 5 и датчик углового положения 6, связанный с выходным валом 7 электропривода, а также редуктор 8 (показан штриховой линией), выходной вал которого является выходным валом 7 электропривода. Входное звено 9 редуктора выполнено в виде вала с зубчатыми колесом 10 и шестерней 11, колесо 10 введено в зацепление со смонтированной на валу электродвигателя 5 шестерней 12. Промежуточное звено редуктора выполнено в виде предпоследнего вала 13 с зубчатыми колесом 14 и шестерней 15, колесо 14 введено в зацепление с шестерней 11 входного звена 9 редуктора. Выходное звено 16 редуктора выполнено в виде жестко связанного с выходным валом 7 зубчатого колеса 17 (в данном примере - выполненного заодно с ним), введенного в зацепление с шестерней 15 предпоследнего вала 13 редуктора. Выходной вал 7 установлен на подшипниках 18 в корпусе 1 и плате 4, предпоследний вал 13 на подшипниках 19, входное звено 9 на подшипниках 20. Предпоследний вал 13 выполнен полым, датчик углового положения 6 установлен соосно предпоследнему валу 13 редуктора и связан с ним посредством компенсирующей муфты 21, размещенной в полости предпоследнего вала редуктора в виде неподвижно установленного на валу датчика 6 поводка 22 со шлицевым венцом 23, введенным в зацепление с шлицевым венцом 24, выполненным на внутренней поверхности полого предпоследнего вала 13. Плата 4 закреплена на корпусе 1 посредством винтов 25. Передаточное отношение от шестерни 15 к зубчатому колесу 17 равно
i=А/В, где:
А - рабочий диапазон датчика углового положения,
В - диапазон углового перемещения выходного вала.
Электропривод работает следующим образом: при подаче через один из электрических соединителей 3 питающего напряжения на электродвигатель 5 вращается вал электродвигателя с шестерней 12. Далее вращающий момент через зубчатое колесо 10, шестерню 11 входного звена 9 редуктора 8 передается на зубчатое колесо 14 предпоследнего вала 13. Далее момент через шестерню 15 передается на зубчатое колесо 17 и выполненный заодно с ним выходной вал 7. При этом шлицевой венец 24, выполненный на внутренней поверхности полого предпоследнего вала 13, приводит во вращение шлицевой венец 23, поводок 22 и вал датчика углового положения 6, что приводит к изменению его показаний. Таким образом, функцию существующей в прототипе специальной отсчетной передачи с выходного вала на вал датчика углового положения в заявленной конструкции выполняет существующая силовая передача последней ступени редуктора 8 - с шестерни 15 на зубчатое колесо 17. При этом размещение компенсирующей муфты 21 внутри полого предпоследнего вала 13 не влечет к искусственному увеличению его диаметра, выбор которого обусловлен несущей способностью подшипников 19 - а они, наряду с подшипниками 18 выходного звена редуктора, являются наиболее нагруженными тангенциальными силами, действующими в зацеплении шестерни 15 и колеса 17, что определяет их достаточно большой внутренний диаметр и дает возможность размещения компенсирующей муфты 21 внутри полости вала 13. Компенсирующая муфта 21 необходима как для передачи вращения с вала 13 на вал датчика углового положения 6, так и для компенсации монтажных несоосностей между этими валами. Выбор передаточного отношения от шестерни 15 к зубчатому колесу 17 равным i=А/В, где А - рабочий диапазон датчика углового положения, В - диапазон углового перемещения выходного вала, позволяет контролировать положение выходного вала во всем диапазоне датчика положения. Действительно, диапазон В угла поворота выходного вала в электроприводах автоматики изделий авиационной и ракетной техники обычно лежит в диапазоне от 120° до 180°, цифровые датчики углового положения обычно являются полннооборотными, т.е. их рабочий диапазон датчика углового положения А=360°. Таким образом, передаточное отношение последней ступени редуктора i=А/В будет лежать в диапазоне от 2 до 3, что вполне согласуется с принятыми методами проектирования (выходное звено из-за того, что оно имеет максимальный модуль зацепления, из-за габаритных ограничений обычно имеет не очень большое значение передаточного отношения). Понятно, что подбором зубьев шестерни 15 и колеса 17 можно добиться нужного передаточного числа с достаточно высокой точностью.
В результате использования изобретения достигается упрощение конструкции и снижение радиальных габаритов и массы электропривода за счет устранения специальной отсчетной передачи вследствие выполнения этой функции существующей силовой передачей. При этом размещение компенсирующей муфты внутри полого предпоследнего вала не приводит к увеличению диаметра последнего, т.к. он определяется внутренним диаметром нагруженных подшипников 19. За счет устранения специальной отсчетной передачи облегчается конструирование электропривода. Указанные преимущества позволяют рекомендовать заявленное техническое решение к использованию в изделиях авиационной и космической техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД (ВАРИАНТЫ) | 2006 |
|
RU2307278C1 |
| РЕДУКТОР ДЛЯ ЭЛЕКТРОПРИВОДА | 1992 |
|
RU2039897C1 |
| УНИВЕРСАЛЬНЫЙ ВЫСОКОМОМЕНТНЫЙ МНОГООБОРОТНЫЙ ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2457385C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД И СПОСОБ ЕГО РАБОТЫ | 2015 |
|
RU2583843C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД ПОВОРОТА НОСОВОЙ ОПОРЫ ШАССИ САМОЛЕТА И СПОСОБ ЕГО РАБОТЫ | 2015 |
|
RU2583518C1 |
| ЭЛЕКТРОПРИВОД | 2014 |
|
RU2558535C1 |
| ВОЛНОВОЙ ПРИВОД | 1995 |
|
RU2080500C1 |
| Рулевой привод | 2023 |
|
RU2818780C1 |
| УСТРОЙСТВО ДЕЛЕНИЯ ПОТОКА ЖИДКОСТИ | 2022 |
|
RU2808161C1 |
| ЭЛЕКТРОПРИВОД | 2015 |
|
RU2614462C1 |
Изобретение относится к машиностроению и может быть использовано в качестве приводов автоматики изделий авиационной и ракетной техники. Электропривод содержит корпус (1), установленные внутри него электродвигатель (5), датчик (6) углового положения, связанный с выходным валом электропривода, и редуктор (8), выходной вал которого является выходным валом (7) электропривода. Входное звено (9) введено в зацепление со смонтированной на валу электродвигателя шестерней (12). Выходное звено (16) редуктора выполнено в виде жестко связанного с выходным валом (7) зубчатого колеса (17), зацепленного с шестерней (15) предпоследнего вала (13) редуктора, который выполнен полым. Датчик углового положения установлен соосно предпоследнему валу (13) редуктора и связан с ним посредством компенсирующей муфты (21), размещенной в полости предпоследнего вала редуктора. Изобретение направлено на упрощение конструкции и снижение радиальных габаритов и массы. 3 ил.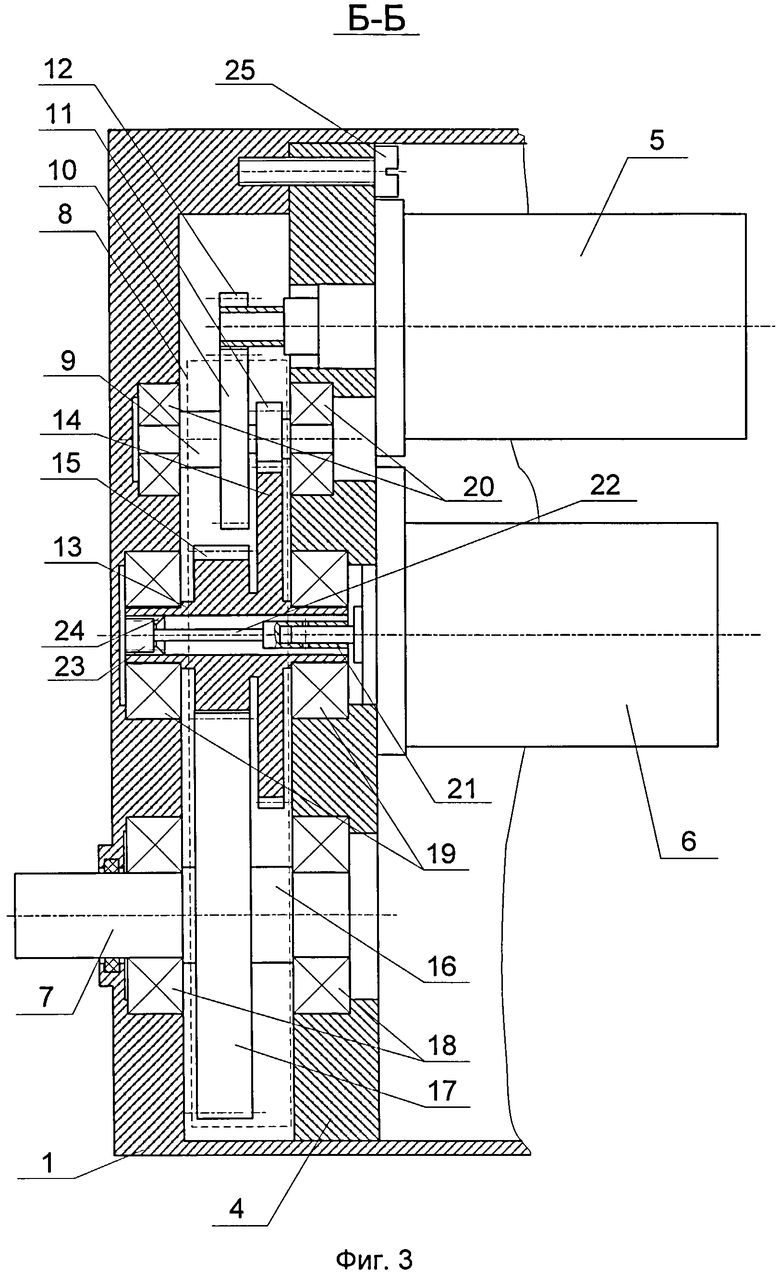
Электропривод, содержащий корпус, установленные внутри него на плате электродвигатель и датчик углового положения, связанный с выходным валом электропривода, а также редуктор, выходной вал которого является выходным валом электропривода, а входное звено введено в зацепление со смонтированной на валу электродвигателя шестерней, причем выходной вал установлен на подшипниках в корпусе и плате, отличающийся тем, что выходное звено редуктора выполнено в виде жестко связанного с выходным валом зубчатого колеса, введенного в зацепление с шестерней предпоследнего вала редуктора, который выполнен полым, датчик углового положения установлен соосно предпоследнему валу редуктора и связан с ним посредством компенсирующей муфты, размещенной в полости предпоследнего вала редуктора, а передаточное отношение от шестерни к зубчатому колесу должно быть равно
i=А/В, где:
А - рабочий диапазон датчика углового положения,
В - диапазон углового перемещения выходного вала.
| ВОЛНОВОЙ ПРИВОД | 2004 |
|
RU2280798C2 |
| ПРИВОД | 2008 |
|
RU2391583C2 |
| ГЕРМЕТИЧНЫЙ ПОВОРОТНЫЙ МЕХАНИЗМ | 2004 |
|
RU2282920C2 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |

