Движитель - вращательное механическое устройство, преобразующее энергию крутящего момента мотора в линейную силу тяги. При разработке ставилась задача использовать инерцию для создания движителя, способного перемещать транспортные устройства с меньшими энергозатратами на трансмиссии и другие промежуточные устройства при создании силы тяги. Движитель может перемещать автомобили, корабли. Аналогом может служить движитель - патент США №3897692, 1975 г. Заявленное устройство имеет ряд существенных отличий от аналога.
Термины, применяемые в описании
Ось координат - линия, условно разделяющая внутреннюю поверхность корпуса.
Рабочая поверхность - первая по ходу вращения поверхность, следующая за задней стенкой.
Прямолинейный участок - поверхность, образованная прямой линией.
Касательная - вспомогательная линия перпендикуляр к линии через центры вращения и груза.
Крутящий момент - энергетический центр вращения масс по окружности.
Движитель состоит из корпуса; ротора (вал с диском); шести грузов роликов; шести грузовых тяг; двух торцовых крышек с подшипниками Фиг.1,2.
Корпус изготовлен в виде кольца, существенный признак его внутренняя поверхность, которая имеет несимметричный профиль, условно поделенный осью координат на переднюю и заднюю стенки, последняя образована полуокружностью, а передняя образована дугами окружности с меньшими радиусами, чем задняя стенка, и прямолинейным участком, а рабочая поверхность ограничена сектором в 90°, прямолинейный участок поверхности параллелен оси координат, центры всех частей окружности, образующих внутреннюю поверхность, расположены на оси координат. Внутри корпуса размещен ротор (вал с диском), на диске которого выполнены шесть отверстий, равноотстоящих от оси вращения и по окружности для крепления в них шарнирно шести грузовых тяг, расстояние от оси вращения до центра отверстий обеспечивает такое положение грузовых тяг, при котором сила от них на грузы направлена под углом 45° и более к касательной при положении груза над внутренней поверхностью профиля, противоположной перемещению устройства, также на диске выполнены вырезы, исключающие касание тягами его вне шарнира. Шесть грузовых тяг выполнены в форме двух пластин или профиля каждая, имеют отверстия на обоих концах, одной стороной тяги крепятся шарнирно на диске, а другой - шарнирно с грузом, обеспечивая его свободное вращение, а длина тяг обеспечивает вектор силы от них к линии радиуса диска через шарнир тяги под углом 90° в районе поверхности профиля, противоположной перемещению устройства. Шесть грузов выполнены в виде роликов цилиндрической формы, свободно вращаются на грузовых тягах. Ротор ориентирован и соединен с корпусом шарнирно с помощью двух торцовых крышек, выпоненных в форме круга и имеющих ложе или кронштейны для подшипников, в последние устанавливается ротор, ложе или кронштейны смещены от центра крышек. Крышки крепятся к корпусу с помощью болтов. Все детали движителя выполнены из качественных сталей с соответствующей обработкой.
Перечень фигур и обозначения
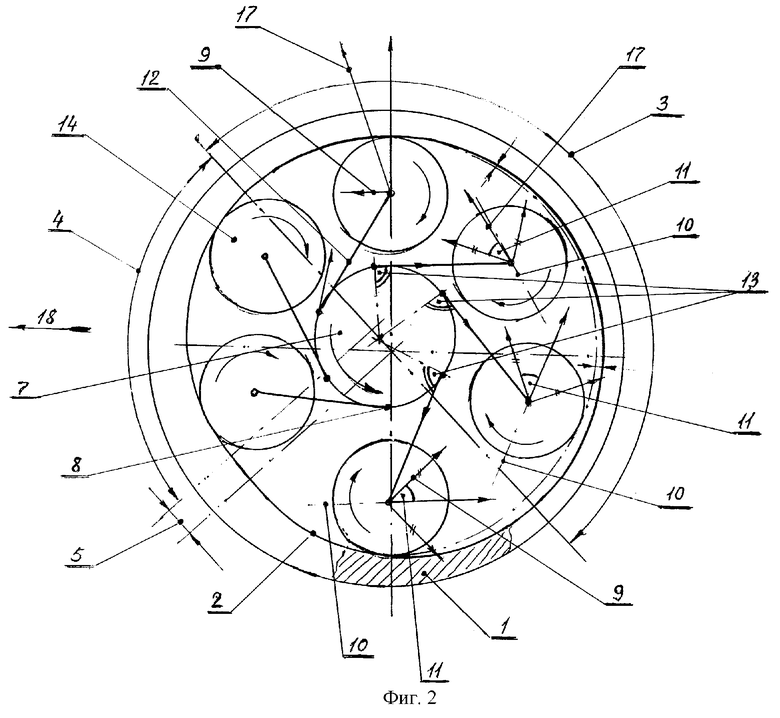
Фигура 1 - кинематическая схема движителя.
Фигура 2 - принципиальная схема работы движителя.
Обозначения
1 - корпус движителя; 2 - внутренняя поверхность; 3 - задняя стенка; 4 - рабочая поверхность; 5- прямолинейный участок поверхности; 6 - вал; 7 - диск; 8 - шарнир грузовой тяги; 9 - F'1 сила, действующая на груз; 10 - касательная; 11 - угол, равный и больше 45°; 12 - грузовая тяга; 13 - угол, равный 90°; 14 - груз в форме ролика; 15 - торцовая крышка; 16 - подшипник; 17 - равнодействущая сила на груз; 18 - направление силы тяги.
Описание принципа работы движителя
Известно, что тела по инерции движутся по прямой линии, а на окружной траектории их удерживает центростремительная сила, при этом, совершая работу, в устройстве ее роль выполняет корпус только в сторону перемещения, а в противоположную эту роль выполняет крутящий момент мотора. Грузы прокатываются по той части внутренней поверхности корпуса, которая в сторону перемещения - часть задней и часть передней стенки (Фиг.2). А над поверхностью профиля, противоположной перемещению, грузы летят на небольшом расстоянии от нее (Фиг.2). На поверхность ролики заходят 35°÷40° перед рабочей поверхностью, на этом участке они будут давить на поверхность с силой по формуле C=mw2r, где m - масса ролика, w -угловая скорость, r - радиус участка. Далее ролик закатывается на рабочую поверхность с меньшим радиусом - значит увеличивается его угловая скорость по отношению к поверхности, а вместо первоначальной массы ролика заходит уже сила С, поэтому давление ролика на рабочую поверхность увеличится в десятки раз (Фиг.2). В районе же поверхности, противоположной перемещению устройства, ролики не касаются ее, они висят на грузовых тягах, так как сила F'1=Р, а сила F'1 на ролики направлена под углом 45° и более относительно касательной, то ролики будут двигаться по вектору равнодействующей силы, а она будет совпадать с касательной, ролики опишут окружность и пролетят над поверхностью (Фиг.2). В свою очередь грузовые тяги в районе этой поверхности загружают ротор только на крутящий момент - это означает, что силы, противодействующей перемещению устройства, нет, так как сила от тяг на диск к линии радиуса через шарнир направлена под углом 90° (Фиг.2).
В районе стенки в сторону перемещения возможна радиальная сила на ротор, но только в сторону перемещения устройства.
Таким образом, получается, что на корпус устройства действует только одна сила - ее вектор от центра вращения через рабочую поверхность наружу, значит и перемещение устройства будет в этом же направлении. Крутящий момент также будет перемещаться вместе с корпусом, так как соединен с ним через торцовые крышки. Мотор создает только крутящий момент и, хотя он на одной раме с устройством, то противодействовать перемещению не будет. Следовательно, можно сделать вывод, что устройство вместе с мотором будет перемещаться в пространстве не отталкиваясь от какой-либо окружающей среды. Окружающая среда для центра движущихся по окружности масс - сам корпус устройства, со стороны перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИЖИТЕЛЬ, ДИСКОЛЕТ, ДИСКОЛЕТ БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ, ПОДВОДНЫЙ ПОДЪЕМНИК-БУКСИР, ДВИЖИТЕЛЬ ПОДВОДНЫХ АППАРАТОВ | 2014 |
|
RU2586180C2 |
| Транспортное средство и внутритрубный движитель динамического типа для него | 2017 |
|
RU2668367C1 |
| РОТОРНАЯ МАШИНА | 2000 |
|
RU2190102C2 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2182241C2 |
| СУДНО С ГИДРОВОЛНОВОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2014 |
|
RU2603813C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ВЫСОКОМАНЕВРЕННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 1997 |
|
RU2127693C1 |
| ТЕПЛОВОЗ С ГОРИЗОНТАЛЬНЫМ ДВИЖИТЕЛЕМ | 1999 |
|
RU2162039C1 |
| Колесно-лопастной движитель транспортного средства | 2019 |
|
RU2711134C1 |
| ВОЛНОВОЙ ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1989 |
|
RU1764275C |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ | 2001 |
|
RU2211344C1 |
Изобретение относится к устройствам, предназначенным для преобразования кинетической энергии мотора в линейную силу тяги транспортного устройства. Движитель содержит корпус в форме кольца, внутренняя поверхность стенки которого разделена осью на переднюю и заднюю стенки, торцовые крышки и ротор с грузами на тягах, установленный между крышками. Передняя стенка образована дугами окружности меньшего радиуса и прямолинейным участком, задняя стенка образована дугой окружности большего радиуса. Центры дуг каждой окружности расположены на оси, прямолинейный участок расположен параллельно оси, а внутренняя поверхность передней стенки выполнена с рабочей поверхностью, ограниченной сектором в 90°. Технический результат - расширение арсенала технических средств. 5 з.п. ф-лы, 2 ил.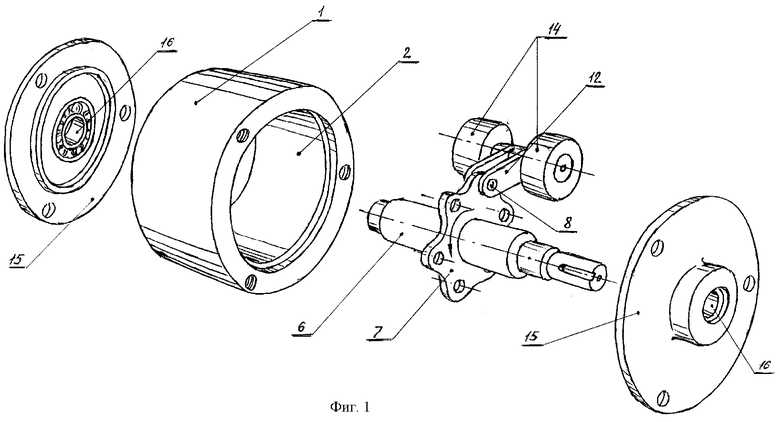
| US 3897692 A, 05.08.1975.WO 97/45639 A1, 04.12.1997.RU 2095625 C1, 10.11.1997.RU 2078996 C1, 10.05.1997. |

