1. Изобретение относится к области создания летательных аппаратов широкого диапазона размеров и назначений, от миниатюрных средств передвижения на одного-двух человек до создания аппаратов вместимостью сотен пассажиров или многотонных грузов при минимальных энергетических затратах на перемещение их на небольших высотах в плотных слоях атмосферы.
Современная авиация базируется на подъемных силах, создаваемых крылом самолета. При этом главным фактором, создающим подъемную силу, является эффект воздушного змея, когда поток воздуха, набегающий на крыло, плоскостью крыла отклоняется вниз и на крыло снизу вверх действует вертикальная составляющая параллелограмма сил. Выпуклость крыла в верхней плоскости создает разные скорости обтекания крыла потоком воздуха сверху и снизу, что на основании уравнения Бернулли создает дополнительную подъемную силу. Анализ конструкций и способов движения летательных аппаратов говорит об огромной энергозатратности на передвижение по воздуху. В отличие от самолетов вертолеты движутся на тяговом усилии, создаваемом несущим винтом, который через механизм управления изменяет угол атаки к направлению горизонта, и этим создается горизонтальная составляющая сил, приводящая в движение вертолет. На горизонтальное движение вертолета расходуется лишь малая часть энергии двигателя, а основная мощность расходуется на создание той самой подъемной силы.
Проанализируем еще раз природу создания подъемной силы на основе уравнения Бернулли, которое дает математическое обоснование взаимодействия динамического и статического давления в потоке жидкости или воздуха. «Высшее образование. В.Б. Федосеев, Физика, стр. 109-111»

где ρ - плотность движущейся жидкости или воздуха, ν - скорость движения потока, Р - статическое давление в потоке. Для классического крыла разница в скоростях обтекания верхней и нижней плоскостей незначительна, однако с учетом того, что эта величина в уравнении Бернулли стоит в квадрате, конечное значение этой величины становится значимым.
Теперь представим себе, что вместо несущего винта у вертолета на том же механизме установлен металлический или металлизированный пластиковый диск. При этом диск в верхней части совершенно плоский. Его форма, по нижней части, может иметь значение лишь в плане обеспечения жесткости диска для недопущения деформаций при вращении и восприятии подъемной силы. Придадим вращение этому диску. При этом верхняя и нижняя плоскости устанавливать на аппарат следом друг за другом два диска, вращающихся в противоположные стороны. Кроме того, даже при применении защитных колпаков за крайними кромками дисков 5 по фиг. 2 потребуется применение обтекателей, фиг. 3, поз. 6 (на фоне диска во фронтальной проекции обтекатель изображен в разрезе), которые, перенаправляя поток воздуха или жидкости, выбрасываемых из каналов при вращении дисков, будут направлять их вдоль вектора силы тяги диска, снижая эффект турбуленции вокруг аппарата.
Вышеобозначенная величина подъемной силы в водной среде говорит о необыкновенных возможностях применения таких дисков в подводной технике. На их базе могут быть созданы аппараты для глубокого погружения для подъема затонувших кораблей, аппараты для движения на глубинах плавания подводных лодок, аппараты, которые смогут двигаться в двух средах при переключении окружной скорости.
Сущность изобретения дисколета состоит в том, что вместо несущего винта вертолета на тех же механизмах крепления и привода винта выполняют сплошной жесткий диск, выполненный из металла или металлизированного пластика, плоский в верхней поверхности и с эллипсоидной либо конической нижней поверхностью. При этом на верхней поверхности методом координатного фрезерования либо альтернативным способом на участке от 0,5 до 0,3 радиуса диска выполняют кольцевую расточку на глубину примерно в 0,05 радиуса диска, при этом конкретный расчет этой глубины может быть определен только экспериментально. Окружность в 0,5 радиуса делят на шесть равных частей и от намеченных на окружности центров тем же радиусом размечают дуги на внешней части круга диска длиной в половину окружности. Через центр и полученные шесть точек на внутреннем кольце намечают оси симметрии, делящие диск на шесть секторов. От точек пересечения осей симметрии с внутренней окружностью кольцевой расточки, следуя по часовой или против часовой стрелки, радиусами, доходящими через одну до следующей точки на окружности в 0,5 радиуса диска, намечают шесть дуг на внешней части круга. От точек пересечения первичных и вторичных дуг у внешнего края диска радиусом до центра диска проводят шесть частей окружности до касания с первичными дугами. Металл из этих криволинейных каналов полностью удаляют на избранную глубину до кольцевой расточки. При этом для устранения эффекта несимметричности подъемных сил при горизонтальном движении дисколета такие диски выполняются двухъярусными с противоположным вращением либо закрытыми обтекаемым колпаком, либо весь летательный аппарат выполняется в форме эллипсоида с размещением под диском в едином корпусе всех механизмов и приводов, для исключения прямого скольжения встречного воздушного потока по диску. В любом из этих вариантов по внешнему краю дисков на некотором расстоянии выполняют обтекатели, направляющие отбрасываемый диском поток воздуха или воды вдоль вектора тяги диска. Кроме того, для создания дисколетов большой грузоподъемности они могут агрегатироваться в одном устройстве так, что своим расположением создают комбинацию любой симметричной компоновки: в варианте круга, ромба, шестигранника и т.д. с размещением салона или грузового помещения по центру и под образованным контуром из элементов дисколета.
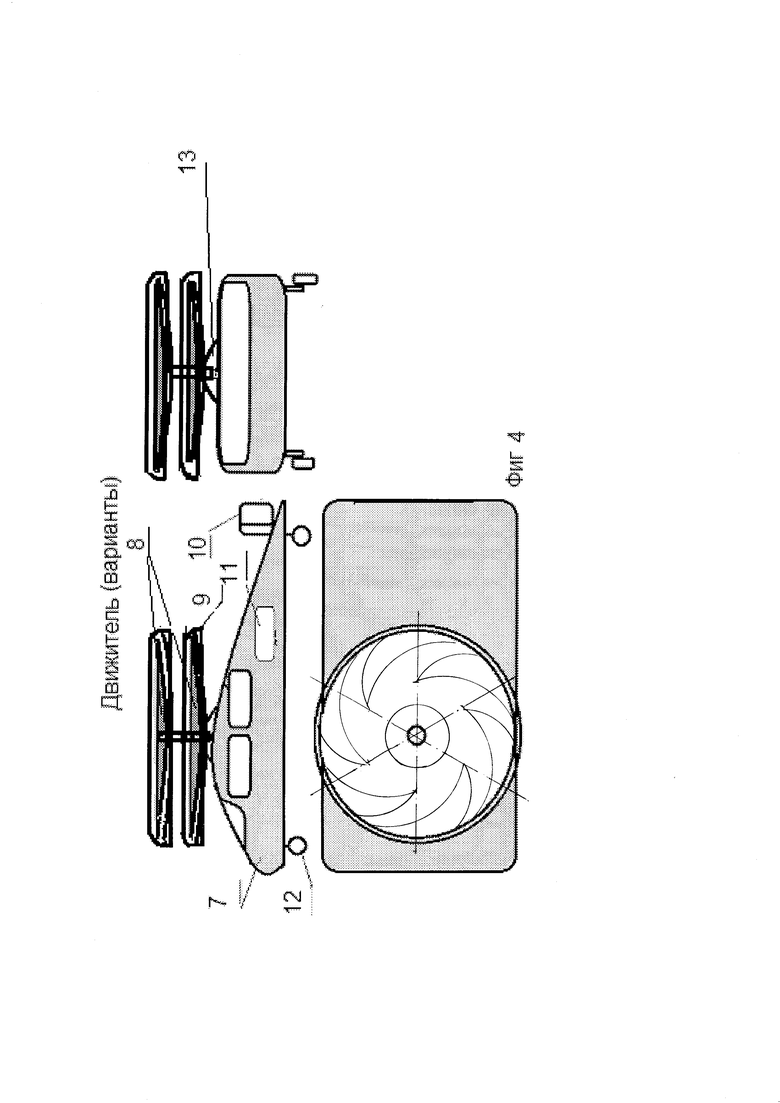
На фиг. 4 изображен один из вариантов такого дисколета. Здесь под №7 изображен корпус дисколета, 8 - диски, 9 - обтекатели, 10 - курсовой руль, 11 - энергоустановка, 12 - опорные колеса, 13 - механизм управления горизонтальным наклоном дисков.
Дисколеты малой вместимости могут выполняться в габаритах небольшого автомобиля, такими, что в перспективе их стояночными площадками могут быть не дворы, а плоские крыши домов, а система автонавигации позволит совершать на них полеты в условиях любой интенсивности городского движения. Их дорогой будет небо, и понятие городских пробок и выбоин на дороге уйдет в прошлое. В целях снижения их веса они могут выполняться из пластика, а функцию трансмиссии для передачи движения на диски от двигателя может выполнять хорошо зарекомендовавшая себя гидромеханическая передача с гидронасосами и гидромоторами вместо карданных валов и прочих элементов трансмиссии.
2. Изобретение относится к области корабельной техники, может использоваться для подъема с морских глубин затонувших кораблей или грузов, которые можно зацепить с помощью специальных, управляемых из батискафа зажимов-струбцин за борта либо за какие-то другие доступные места затонувшего корабля. Может работать в единственном числе либо в составе группы подъемников в зависимости от массы поднимаемого корабля, грузоподъемности подъемника и прочности канатов, а также от положения на морском дне затонувшего корабля. Изобретение является разновидностью дисколета, приспособленного для работы в воде и на больших глубинах.
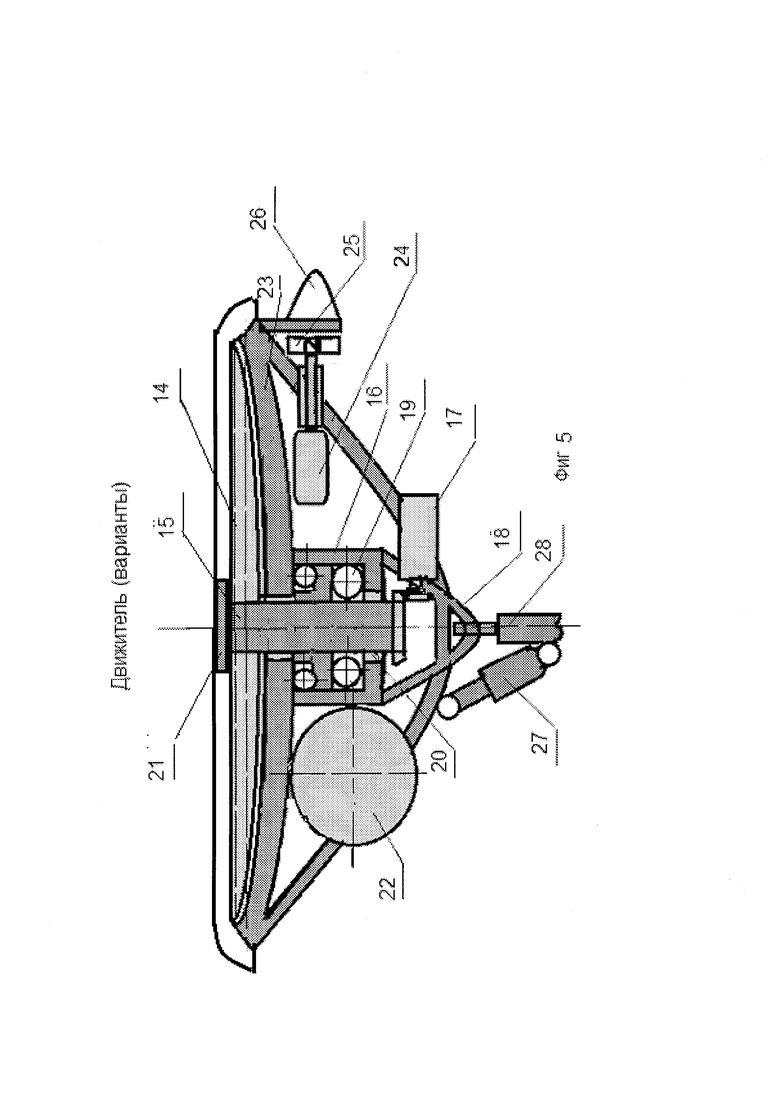
На фиг. 5 изображен один из вариантов устройства такого подводного подъемника-буксира. Здесь под №14 изображен в разрезе диск, который выполняют из металла или пластика, верхняя часть его выполняется в виде плоскости с выфрезерованными на поверхности шестью каналами, воспроизводящими все геометрические соотношения диска по фиг. 2. Его нижняя часть выполняется в конусовидной или в эллипсовидной форме. Вокруг диска выполняют обтекатель, как на фиг. 3, для направления воды вдоль вектора тяги диска. 15 - вал диска, его устанавливают в подшипниковый узел 16. На нижнем конце вала выполняют механизм привода от энергоустройства 17. В качестве такого энергоустройства может быть применен электродвигатель, гидромотор, либо какой-то другой силовой агрегат. Нижнюю часть корпуса выполняют в варианте буксирной скобы 18. На этой скобе может навешиваться весь арсенал грузоподъемных средств. Вал устанавливают в подшипниках 19. В верхней и нижней частях подшипникового узла выполняют сальниковые уплотнения 20, которые удерживают смазку и не допускают попадание в узел морской воды. Диск на валу крепят на резьбовом соединении либо иным способом, а сверху фиксируют контргайкой 21.
Управление подъемником осуществляют с помощью батискафа 22, в котором располагаются экипаж и все органы дистанционного управления процессом. Все механизмы выполняются в обтекаемом, несущем корпусе подъемника 23. Сам корпус может быть выполнен негерметичным. Это облегчит массу подъемника и упростит конструкцию. С момента обнаружения поднимаемого объекта подъемник может быть спущен к нему на тросах, однако с учетом морских течений сам подъемник должен иметь возможность маневрировать относительно объекта, для этой цели в корпусе устанавливают энергоустройство 24 с приводом движителя 25 и рулем горизонтального перемещения 26. Управление вертикальной ориентацией осуществляют с помощью гидроцилиндров 27, которых должно быть как минимум два, размещенных относительно друг друга под прямым углом в плоскости вертикальной оси и воздействующих на механизм сцепки 28. В натянутом положении сцепки гидроцилиндры будут легко изменять ориентацию подъемника.
Процесс образования подъемной силы диском и ее возможные величины описаны выше. Вместе с тем подъемная сила аппарата состоит в прямой зависимости от глубины погружения. На глубине в один метр статическое давление будет составлять 11 т/м2, на глубине в 10 м оно будет 21 т/м2. Эти величины статического давления будут определять потолок величин подъемной силы. Следовательно, в расчетах таких аппаратов необходимо ориентироваться на статическое давление в глубинах работы аквалангистов с целью доведения до логического конца операции подъема.
Кроме переменчивости статического давления и, соответственно, подъемной силы необходимо учитывать фактор прочности буксирных канатов. В практике стальной трос диаметром 8 мм выдерживает статическую нагрузку в 800 кг. Отсюда трос в 80 мм при возрастании площади поперечного сечения в соотношении πR2 будет иметь прочность в 80 т, а в 800 мм - лишь 8000 т. Эти возможности буксирных канатов определяют технологию и тактику в работе по подъему. В современных условиях никто в море не пользуется стальными тросами, ведь они корродируют в морской воде. Мореходы давно пользуются синтетическими канатами, которые прочнее и надежнее стальных. Именно показатели прочности канатов становятся в этом случае определяющими возможности осуществления таких работ. Вместе с тем в случае с атомоходом «Курск» и другими аналогичными авариями на подводных лодках такие подъемники могут стать гарантией успеха в оказании помощи. Исходя из прочности канатов, проектирование подъема может осуществляться в расчете на работу группы подъемных аппаратов с суммарной расчетной прочностью канатов в соответствии с массой поднимаемого корабля или груза.
При вращении в воде диска на корпус по третьему закону Ньютона будет действовать равная по величине и обратная по знаку сила вращения. Чтобы корпус не вращался, есть два варианта действий: подъемник выполнить симметрично составленным из нескольких элементов, изображенных на фиг. 5, но в одном корпусе и с единой буксирной скобой, это исключит вращающее действие на корпус, при этом вращение дисков обеспечить в разных направлениях. Можно выполнить подъемник в одном агрегате с расположением дисков один над другим и размещением их на некотором удалении, но с синхронным вращением дисков в противоположные стороны и прочной стыковкой несущих элементов с общим корпусом подъемника.
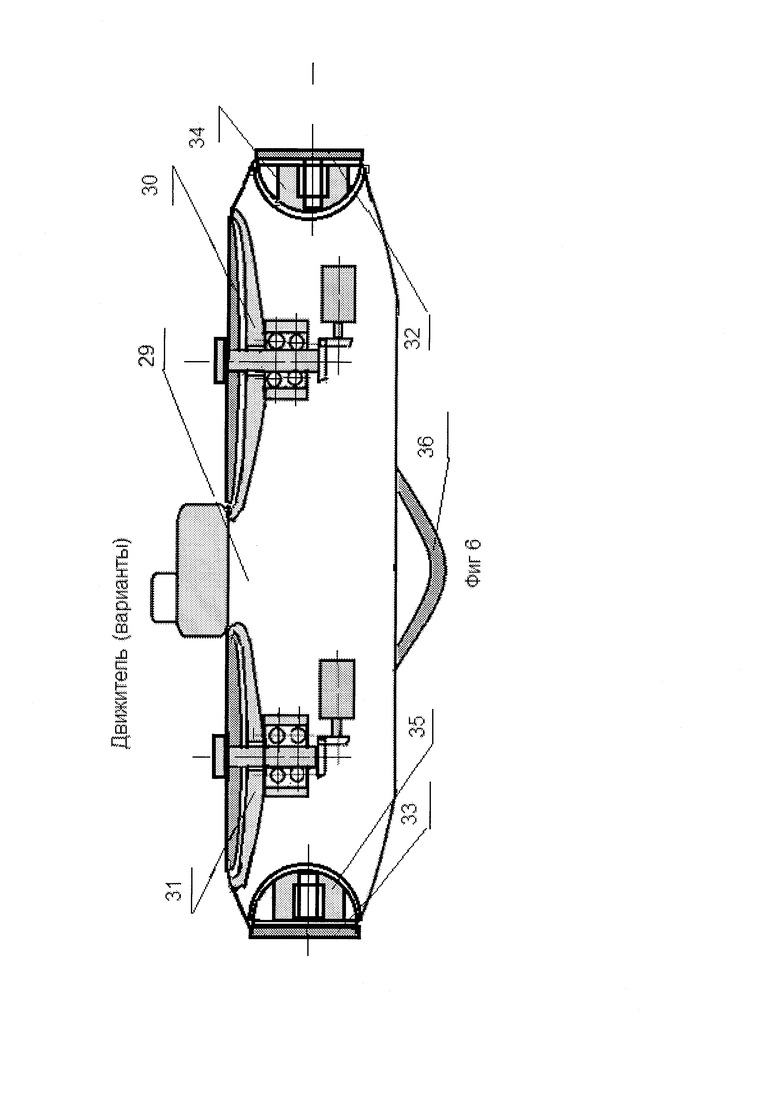
Такой подъемник-буксир может использоваться и по другому назначению. Если диск разместить вертикально да еще с возможностью поворота в двух плоскостях, подобно человеческому глазу, с механизмом привода, аналогичным автомобильному шарниру равных угловых скоростей, либо от встроенных электродвигателей, он может быть применен в качестве движителя для подводных лодок либо для постройки облегченных вариантов подводных подъемников-буксиров для работы на небольших глубинах в зоне плавания подводных лодок, в качестве «скорой помощи» терпящим бедствие подводным лодкам, для очистки донной территории портов, на строительстве подводных газо- и нефтепроводов и т.д. При этом для движения судна задним ходом таких движителей должно быть два - сзади и спереди, и поочередным включением их в работу можно будет реверсировать движение, а поворотами в двух плоскостях движителей управлять горизонтальным и наклонным к горизонту курсом перемещения, разворачиваться на одном месте. Конструкция такого подводного подъемника-буксира изображена на фиг 6. Здесь под №29 изображен корпус, 30 и 31 - те же подъемники, 32 и 33 - движители, 34 и 35 - электродвигатели, встроенные в корпус движителей, 36 - грузовая скоба.
Подъемник по фиг. 6 может быть выполнен и для других целей. Если убрать торцевые ходовые диски, а его несущим дискам придать возможность изменять плоскость вращения, как у вертолета, и оснастить его двухскоростным приводом дисков для воды и воздуха, корпус выполнить бронированным, можно получить аппарат для движения в двух средах, когда аппарат к цели сможет быстро двигаться по воздуху, на нужном расстоянии уходить под воду, подходить под днище кораблей противника, наносить удар, выныривать из воды и вновь двигаться по воздуху либо выполнять функции летающего танка при действиях на суше.
Сущность изобретения подводного подъемника-буксира состоит в том, что он выполнен из корпуса с вмонтированными в него батискафом, силовым агрегатом с устройством горизонтального перемещения, подшипниковым узлом с валом, на нижнем конце которого выполняют механизм привода с энергоустройством, а на верхнем, в горизонтальной плоскости, закрепляют прочный диск из металла или пластика, выполненный в соответствии с описанием диска по п. 1, кроме того, весь агрегат для снятия вращающего воздействия на корпус со стороны подвижного диска выполняют либо в варианте нескольких элементов, компактно скомплектованных в один механизм, либо вместо одного подвижного диска над ним, на некотором удалении выполняют второй подвижный диск, синхронно вращающийся через механизм привода в противоположную сторону, кроме того, при вертикальном расположении дисков двух таких подъемников-буксиров сзади и спереди судна на устройствах, позволяющих поворачиваться в двух плоскостях с механизмом привода дисков, либо от вмонтированных внутрь электродвигателей он превращается в движитель, который обеспечит маневрирование в двух плоскостях и разворот на одном месте, может применяться как средство движения на подводных аппаратах.
Так же, как и в варианте дисколета, энергопотребление такого подъемника будет незначительным, ведь при его работе будет совершаться скольжение диска в воде или в воздухе, с переброской лишь небольших масс воды или воздуха. На базе этого изобретения могут быть воссозданы летательные аппараты древних цивилизаций, которые в письменных источниках называли «Виманы» или «Вайтманы», а также те загадочные летательные аппараты, которые по легенде у берегов Антарктиды в 1947 году вылетали из-под воды и атаковали американскую эскадру, ведь законы гидродинамики для воды и воздуха одни и те же, и для такого универсального аппарата потребуется лишь согласование скоростей вращения дисков со средой пребывания, а по грузоподъемности, как мы видим из приведенных расчетов, груз в 100 тонн они будут переносить легко.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДОВОЙ ГИДРОМЕХАНИЧЕСКИЙ ДВИЖИТЕЛЬ | 2012 |
|
RU2492103C1 |
| РОТОРНО-ЛОПАСТНОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ-(ВАРИАНТЫ) | 2012 |
|
RU2589882C2 |
| АЭРОДИНАМИЧЕСКИЙ ДВИЖИТЕЛЬ | 1997 |
|
RU2118600C1 |
| АЭРОДИНАМИЧЕСКИЙ ДВИЖИТЕЛЬ | 1998 |
|
RU2153442C2 |
| ГИДРОАЭРОДИНАМИЧЕСКИЙ ДВИЖИТЕЛЬ | 1998 |
|
RU2136539C1 |
| МОРСКОЕ СУДНО ДЛЯ УКЛАДКИ СТАЛЬНЫХ ТРУБ, ГИБКИХ ЭЛЕМЕНТОВ И ПОДВОДНЫХ КОНСТРУКЦИЙ В ЛЕДОВЫХ УСЛОВИЯХ | 2012 |
|
RU2509677C1 |
| ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ПОДВОДНОГО АППАРАТА | 2002 |
|
RU2222469C1 |
| СПОСОБ УВЕЛИЧЕНИЯ ПОДЪЕМНОЙ СИЛЫ КРЫЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2515698C1 |
| СУДОВОЙ ДВИЖИТЕЛЬ-КОНЦЕНТРАТОР | 2009 |
|
RU2438917C2 |
| ДВИЖИТЕЛЬ | 2005 |
|
RU2305648C2 |
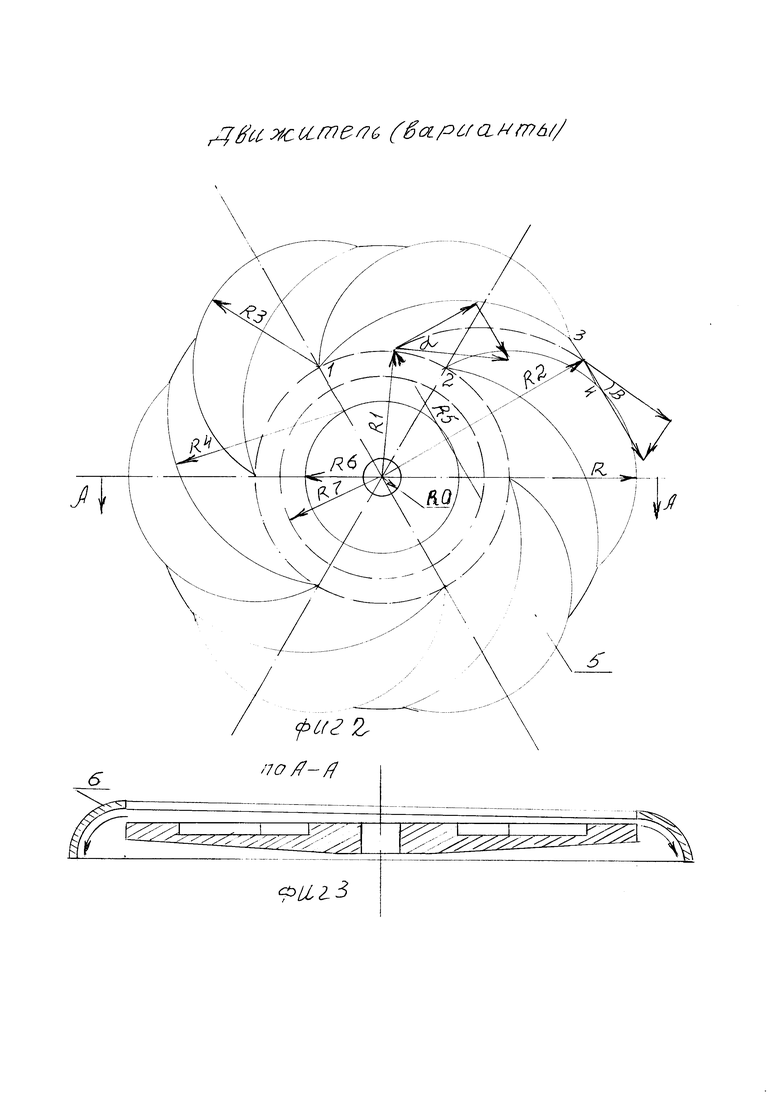
Изообретение относится к конструкции движителей, работающих в воздушной и водной средах. Движитель выполнен в виде сплошного жесткого диска из металла или металлизированного пластика. Верхняя часть диска выполнена плоской, а нижняя эллипсоидной или конической. На верхней поверхности фрезерования на участке от 0,5 до 0,3 радиуса выполняют кольцевую расточку на глубину 0,05 радиуса диска. Окружность в 0,5 радиуса делят на шесть равных и от намеченных точек тем же радиусом размечают дуги на внешней части круга диска. Через центр и полученные шесть точек намечают оси симметрии, делящие диск на шесть секторов. Намечают шесть дуг на внешней части круга до точек пересечения с первыми дугами, от точек пересечения первичных и вторичных дуг у внешнего края диска до центра диска проводят шесть частей окружности до касания с первичными дугами. Металл из криволинейных сегментов от кольцевой расточки до отрезков дуг удаляют на глубину кольцевой расточки. Движители могут применяться вместо несущих винтов на дисколетах и в качестве движителей на подводных аппаратах. Достигается увеличение подъемной силы движителей. 5 н.п. ф-лы, 6 ил. 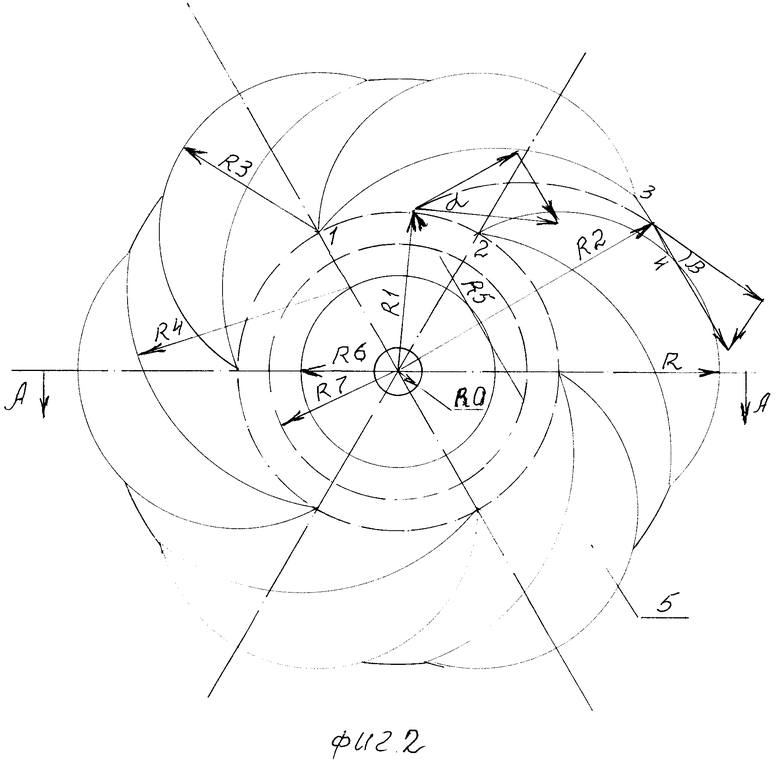
1. Движитель, выполненный в виде сплошного жесткого диска из металла или металлизированного пластика, отличающийся тем, что его верхняя часть плоская, а нижняя с эллипсоидной либо конической поверхностью, при этом на верхней поверхности методом координатного фрезерования, на участке от 0,5 до 0,3 радиуса диска выполняют кольцевую расточку на глубину примерно в 0,05 радиуса диска, при этом конкретный расчет этой глубины может быть определен только экспериментально, кроме того, окружность в 0,5 радиуса делят на шесть равных частей и от намеченных на окружности центров тем же радиусом размечают дуги на внешней части круга диска длиной примерно в половину окружности, через центр и полученные шесть точек на внутреннем кольце намечают оси симметрии, делящие диск на шесть секторов, от точек пересечения осей симметрии с внутренней окружностью кольцевой расточки радиусами, доходящими через одну до следующей точки на окружности в 0,5 радиуса диска, намечают шесть дуг на внешней части круга до точек пересечения с первыми дугами, от точек пересечения первичных и вторичных дуг у внешнего края диска радиусом до центра диска проводят шесть частей окружности до касания с первичными дугами, металл из этих криволинейных сегментов от кольцевой расточки до шести отрезков дуг удаляют на глубину кольцевой расточки.
2. Дисколет, отличающийся тем, что вместо несущего винта вертолета на тех же механизмах крепления и привода винта выполняют диск по п. 1, при этом для устранения эффекта несимметричности подъемных сил при горизонтальном движении дисколета такие диски выполняются двухъярусными с противоположным вращением, либо закрытыми обтекаемым колпаком, либо весь летательный аппарат выполняется в форме эллипсоида с размещением под диском в едином корпусе всех механизмов и приводов, для исключения прямого скольжения встречного воздушного потока по диску в любом из этих вариантов по внешнему краю дисков на некотором расстоянии выполняют обтекатели, направляющие отбрасываемый диском поток воздуха вдоль вектора тяги диска.
3. Дисколет большой грузоподъемности, отличающийся тем, что движители по п. 1 могут агрегатироваться в одном устройстве так, что своим расположением создают комбинацию любой симметричной компоновки в варианте круга, ромба, шестигранника с размещением салона или грузового помещения по центру и под образованным контуром из элементов дисколета.
4. Подводный подъемник-буксир, отличающийся тем, что выполнен из корпуса с вмонтированными в него батискафом, силовым агрегатом с устройством горизонтального перемещения, подшипниковым узлом с валом, на нижнем конце которого выполняют механизм привода с энергоустройством, а на верхнем в горизонтальной плоскости закрепляют движитель по п. 1, кроме того, весь агрегат для снятия вращающего воздействия на корпус со стороны подвижного диска выполняют либо в варианте нескольких элементов, компактно скомплектованных в один механизм, либо вместо одного движителя над ним на некотором удалении выполняют второй, синхронно вращающийся через механизм привода в противоположную сторону.
5. Движитель подводных аппаратов, отличающийся тем, что при вертикальном расположении двух таких движителей по п. 1 сзади и спереди судна на устройствах, позволяющих поворачиваться в двух плоскостях, с механизмом привода дисков от электродвигателей он превращается в движитель, который обеспечивает маневрирование в двух плоскостях и разворот на одном месте, может применяться как средство движения на подводных аппаратах.

