Изобретение относится к измерительной технике и может использоваться в самых разных областях науки и техники для зондирования атмосферы или океана - определения вертикального профиля скорости звука и (или) вертикального профиля скорости электромагнитной волны (профиля показателя преломления). С одной стороны, эти профили представляют интерес сами по себе, поскольку именно они определяют рефракцию акустических или электромагнитных волн в исследуемой среде. С другой стороны, по указанным профилям можно сделать определенные выводы о физико-химических свойствах исследуемой среды, определяющих скорость звука или показатель преломления. В частности, для атмосферы можно определить вертикальные профили температуры и влажности.
Известен способ определения вертикального профиля скорости звука в океане [1], состоящий в том, что в исследуемую среду посылают зондирующий объект, перемещающийся по вертикали, для различных положений последнего измеряют параметры океана, зависящие от скорости звука, и по этим параметрам определяют вертикальный профиль скорости звука. При этом параметры океана измеряют датчиками, установленными непосредственно на зондирующем объекте, а сам объект механически связан с соответствующим судном (с борта которого и проводятся измерения).
Однако этот способ основан на «контактных» измерениях с соответствующими ограничениями. Кроме того, он достаточно сложен в реализации.
Наиболее близким техническим решением является способ радиоакустического зондирования атмосферы [2], состоящий в том, что в исследуемую среду посылают зондирующий объект, перемещающийся по вертикали, направляют на этот объект модулированную электромагнитную или акустическую волну, регистрируют доплеровский сдвиг частоты волны, переизлученной объектом, для различных положений последнего, и по зависимости сдвига частоты от положения объекта судят о вертикальном профиле характеристик исследуемой среды.
В этом способе зондирующим объектом является, по существу, акустический волновой пакет, распространяющийся по вертикали в атмосфере. На этот пакет направляют модулированную электромагнитную волну СВЧ-диапазона, доплеровский сдвиг которой дает информацию о скорости звука (скорости движения акустического волнового пакета). По профилю скорости звука определяют профиль температуры.
Для определения профиля влажности в способе [2] дополнительно измеряют разность фаз для различных доплеровских частот. Однако точность восстановления профиля влажности при этом не слишком велика. Помимо этого, практическая реализация этого способа является достаточно сложной, а сам способ заведомо непригоден для зондирования океана.
Технический результат, который может быть получен при осуществлении изобретения (цель изобретения), состоит в упрощении реализации измерений, повышении их точности, а также в обеспечении возможности независимого определения как профиля скорости звука, так и профиля показателя преломления в атмосфере или в океане.
Указанный результат достигается тем, что в исследуемую среду посылают зондирующий объект, перемещающийся по вертикали, направляют на этот объект модулированную электромагнитную или акустическую волну, регистрируют доплеровский сдвиг частоты волны, переизлученной объектом, для различных положений последнего, и по зависимости сдвига частоты от положения объекта судят о вертикальном профиле характеристик исследуемой среды. При этом на объект направляют модулированную электромагнитную или акустическую волну, содержащую такие частоты f1 и f2, что f1>C/h, a f2<С/Н, где С - средняя скорость волны в исследуемой среде, h - требуемое пространственное разрешение, Н - максимальная дальность измерений, определяют для частот f1 и f2, переизлученных объектом, соответствующие доплеровские сдвиги при различных положениях объекта, находят отношение этих сдвигов, и по этому отношению вычисляют вертикальный профиль скорости распространения волны.
В частности, при зондировании атмосферы направляют на зондирующий объект электромагнитную волну СВЧ-диапазона и акустическую волну совместно, вычисляют вертикальные профили скорости электромагнитной волны и скорости звука, определяют давление на поверхности земли, и по этим данным судят о вертикальных профилях температуры и влажности атмосферы.
В частности, при зондировании океана направляют на зондирующий объект электромагнитную волну светового диапазона и акустическую волну совместно, и вычисляют вертикальные профили скорости электромагнитной волны (показателя преломления) и скорости звука, и по этим профилям судят о вертикальных профилях характеристик океана, определяющих скорость распространения указанных волн.
В частности, в качестве зондирующего объекта выбирают акустический волновой пакет и вычисляют вертикальный профиль скорости распространения электромагнитной волны, а профиль скорости звука определяют по профилю сдвига частоты f1 с учетом профиля скорости распространения электромагнитной волны.
В частности, для различных моментов времени находят интегральный сдвиг фазы волны частоты f1, переизлученной зондирующим объектом, и по этому сдвигу определяют наклонную дальность до зондирующего объекта.
В частности, волну частоты f1, переизлученную зондирующим объектом, регистрируют двумя парами приемников, каждая из которых разнесена на известное расстояние в направлении одной из осей координат, определяют для каждой пары разность фаз, и по измеренным значениям разностей фаз вычисляют азимут и угол места зондирующего объекта.
Способ основан на особенности эффекта Доплера в средах с градиентами скорости звука (для акустической волны) или показателя преломления (для электромагнитной волны). Эта особенность состоит в том, что на сдвиг частоты влияет лишь скорость звука (показатель преломления) в пределах области, длина которой по порядку величины равна длине соответствующей волны. Остальные участки трассы распространения влияют только на фазу волны, но не на ее частоту.
Действительно, рассмотрим (для конкретности) акустическую волну, распространяющуюся в направлении Oz:  . Здесь U0 - амплитуда, ω0 - частота, k - волновое число,
. Здесь U0 - амплитуда, ω0 - частота, k - волновое число,  , С - скорость волны (скорость звука), Λ - длина волны,
, С - скорость волны (скорость звука), Λ - длина волны,  - полная фаза волны. Если С=C(z), то полная фаза волны будет иметь вид:
- полная фаза волны. Если С=C(z), то полная фаза волны будет иметь вид:  , где z1=const - координата источника, z2=z2(t) - координата приемника. Тогда мгновенная частота
, где z1=const - координата источника, z2=z2(t) - координата приемника. Тогда мгновенная частота  , где v2=dz2/dt - скорость приемника. То есть, сдвиг частоты зависит от «локального» значения скорости звука С. В свою очередь, о «локальности» можно говорить лишь в сравнении с длиной волны Λ. Если Λ≥z2-z1, то С(z2) есть скорость звука, усредненная по пространственному масштабу, по порядку величины равному Λ. Если же Λ≥z2-z1, то усреднение следует проводить по масштабу, по порядку величины, равному z2-z1.
, где v2=dz2/dt - скорость приемника. То есть, сдвиг частоты зависит от «локального» значения скорости звука С. В свою очередь, о «локальности» можно говорить лишь в сравнении с длиной волны Λ. Если Λ≥z2-z1, то С(z2) есть скорость звука, усредненная по пространственному масштабу, по порядку величины равному Λ. Если же Λ≥z2-z1, то усреднение следует проводить по масштабу, по порядку величины, равному z2-z1.
На фиг.1 представлена схема устройства для реализации способа применительно к измерению вертикального профиля скорости звука или профиля показателя преломления в атмосфере.
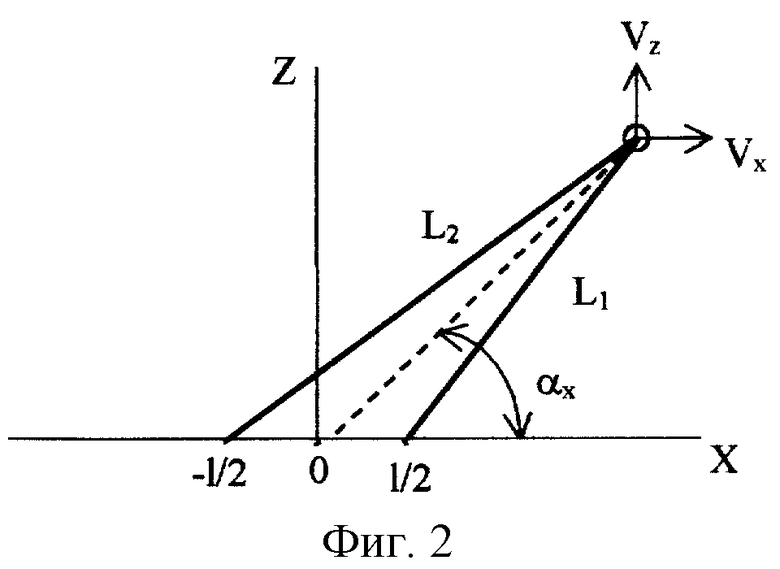
На фиг.2 представлена схема определения угла места зондирующего объекта.
Устройство содержит генератор 1 опорной частоты f1; формирователь 2 частоты модуляции f2=f1/M (M - заранее заданное число); модулятор 3; передающую антенну 4; зондирующий объект (зонд) 5; приемную антенну 6; блок 7 разделения несущей частоты и частоты модуляции; смеситель 8 (для несущей частоты); измеритель 9 длительности периода биений (для несущей частоты); формирователь 10 «умноженной частоты модуляции»; смеситель 11 (для частоты модуляции); 12 - измеритель длительности периода биений (для частоты модуляции); блок обработки 13.
Работает устройство по предлагаемому способу следующим образом.
Передающая антенна 4 облучает зондирующий объект 5 модулированной волной. При этом несущую (опорную) частоту f1 генератора 1 выбирают такой, чтобы соответствующая длина волны λ1=C/f1 не превосходила требуемого пространственного разрешения h (С - скорость распространения волны в исследуемой среде). Частоту модуляции f2=f1/M (М=103÷104 - заранее заданное число) генератора 2 выбирают такой, чтобы длина волны λ2=C/f2, соответствующая частоте модуляции, превосходила максимальную дальность измерений H. При измерении профиля скорости звука используется акустическая волна, а при измерении профиля показателя преломления - электромагнитная волна СВЧ-диапазона. Антенна 6 принимает волну, отраженную (рассеянную) зондирующим объектом 5. При необходимости (в случае сравнительно больших дальностей или же при малом эффективном поперечнике рассеяния зондирующего объекта) на этом объекте может быть установлен дополнительный ретранслятор. Блок 7 обеспечивает разделение принятых антенной 6 несущей частоты fp1 и частоты модуляции fp2. Блок 8 выделяет биения опорной частоты f1 и принятой частоты fp1 (за счет эффекта Доплера fp1≠f1). Блок 9 обеспечивает измерение длительности периода биений Tp1=1/(f1-fp1) путем заполнения соответствующего временного интервала метками времени с периодом опорной частоты T1=1/f1. При этом относительный сдвиг несущей частоты  , где N1 - количество меток времени в одном измеряемом периоде. Блок 10 формирует «умноженную частоту модуляции» f* p2=fp2M (за счет эффекта Доплера fp2≠f2=f1/M). Блок 11 выделяет биения частоты f* p2 и опорной частоты f1. Блок 12 обеспечивает измерение длительности периода этих биений
, где N1 - количество меток времени в одном измеряемом периоде. Блок 10 формирует «умноженную частоту модуляции» f* p2=fp2M (за счет эффекта Доплера fp2≠f2=f1/M). Блок 11 выделяет биения частоты f* p2 и опорной частоты f1. Блок 12 обеспечивает измерение длительности периода этих биений  путем заполнения соответствующего временного интервала метками времени с периодом опорной частоты T1=1/f1. Как отмечалось выше, f1=Mf2. При этом относительный сдвиг частоты модуляции
путем заполнения соответствующего временного интервала метками времени с периодом опорной частоты T1=1/f1. Как отмечалось выше, f1=Mf2. При этом относительный сдвиг частоты модуляции  , где N2 - количество меток времени в одном измеряемом периоде. Блок обработки 13 вычисляет отношение А=A2/A1=N1/N2 для различных высот зонда и обеспечивает восстановление вертикального профиля скорости звука или показателя преломления по виду A(z), где z - высота зонда.
, где N2 - количество меток времени в одном измеряемом периоде. Блок обработки 13 вычисляет отношение А=A2/A1=N1/N2 для различных высот зонда и обеспечивает восстановление вертикального профиля скорости звука или показателя преломления по виду A(z), где z - высота зонда.
Выше неявно полагалось, что излучается непрерывная волна. Тогда можно обеспечить максимальную точность измерений. В то же время, для импульсного режима (с большей пиковой мощностью сигнала) можно использовать иные (известные) приемы для измерения сдвига частоты, например, описанные в [2].
Восстановление профиля скорости волны основано на следующих соображениях.
Положим, что λ1≈h, λ2≈H, где h - требуемое разрешение по высоте (точнее говоря, по дальности), Н - максимальная высота (дальность) зондирования. Тогда для скорости волны C(z) на высоте z сдвиги частот сигналов, принятых на земле, будут иметь вид:  , где
, где

Нетрудно видеть, что отношение сдвигов частот определяется только вертикальным профилем скорости волны и не зависит от скорости движения зонда:
Поскольку величина h соответствует пространственному разрешению, то положим, что Сh=C(z). Тогда получим:
Для атмосферы (как и для океана) относительные изменения как показателя преломления, так и скорости звука весьма малы, т.е. |А-1|≪1. Поэтому положим, что  , причем
, причем 
Тогда из (1) нетрудно получить дифференциальное уравнение:
Его решение имеет вид:

где С0=С(0) - скорость волны на уровне земли.
Для показателя преломления n(z), очевидно, получим:

где n0 - показатель преломления на уровне земли.
Таким образом, определив параметр А (измерив относительные сдвиги несущей частоты и частоты модуляции), по соотношениям (2-3) можно вычислить вертикальный профиль скорости звука (для акустической волны) или показателя преломления (для электромагнитной волны СВЧ-диапазона).
Для схемы, представленной на фиг.1, относительные погрешности определения параметров A1, А2 могут быть малыми. Если f1≈1 ГГц, то 
Вообще говоря, определенный вклад в погрешность δA1/A1 может внести и относительная нестабильность опорной частоты δf1/f1. Однако в рассматриваемом случае существенна лишь кратковременная нестабильность - за время, существенно меньшее секунды. Поэтому такая нестабильность может быть заметно меньше 10-8 при сравнительно несложной электронной схеме.
Соответственно, в этом случае относительная погрешность определения показателя преломления δn/n0≈10-8. Перейдем теперь к используемому в СВЧ-диапазоне индексу преломления  , где n - показатель преломления. Тогда
, где n - показатель преломления. Тогда  , где N0 - индекс преломления на уровне земли (z=0).
, где N0 - индекс преломления на уровне земли (z=0).
Рассмотрим теперь погрешности определения скорости звука. Поскольку в воздухе эта скорость на шесть порядков меньше скорости света, то соответственно выше и относительный сдвиг частоты. В этом случае для реальных значений скорости движения зонда v≈3 м/с имеем: 
При выборе несущей частоты необходимо учитывать затухание акустических волн, возможные акустические помехи и т.д. По-видимому, приемлемой для практики является частота, составляющая несколько килогерц (длина волны λак≈10 см).
Измерение периода  следует производить путем заполнения его метками времени с периодом некоторой «образцовой» частоты Т0≈10-8 с и подсчета соответствующего количества N1 импульсов: Tp1=N1T0. С помощью этих же меток времени при необходимости можно контролировать и стабильность несущей частоты f1. Для повышения точности измерений можно измерять длительность, например, десяти или ста периодов Tp1 (в пределах заданного пространственного разрешения). В этом случае относительная погрешность δA1/A1 может быть достаточно малой при умеренных требованиях к электронному тракту:
следует производить путем заполнения его метками времени с периодом некоторой «образцовой» частоты Т0≈10-8 с и подсчета соответствующего количества N1 импульсов: Tp1=N1T0. С помощью этих же меток времени при необходимости можно контролировать и стабильность несущей частоты f1. Для повышения точности измерений можно измерять длительность, например, десяти или ста периодов Tp1 (в пределах заданного пространственного разрешения). В этом случае относительная погрешность δA1/A1 может быть достаточно малой при умеренных требованиях к электронному тракту:  .
.
Измерение сдвига частоты модуляции осуществляется аналогично рассмотренному выше случаю электромагнитных волн СВЧ-диапазона, с использованием меток времени «образцовой» частоты.
В результате можно обеспечить малое значение  . Тогда δС<1 см/с.
. Тогда δС<1 см/с.
При необходимости можно уменьшить на порядок погрешность δА (до значения, соответствующего случаю электромагнитных волн СВЧ-диапазона). Однако в этом случае существенно возрастают требования к сравнительно долговременной стабильности «образцовой» частоты.
В рассматриваемом случае за время измерения Tp1≈Тр2 зонд пройдет расстояние C/f1≈λ1. То есть, и с рассматриваемой точки зрения пространственное разрешение примерно равно длине волны.
По-видимому, при зондировании атмосферы предлагаемый способ наиболее эффективен с точки зрения определения вертикального профиля показателя (индекса) преломления, а при зондировании океана - с точки зрения определения вертикального профиля скорости звука. Эти параметры представляют интерес сами по себе, поскольку именно они определяют рефракцию акустических или электромагнитных волн в исследуемой среде (океане или атмосфере). Помимо этого, по указанным профилям в принципе возможно определение профиля характеристик исследуемой среды, определяющих скорость распространения соответствующей волны.
При зондировании океана устройство для реализации способа аналогично представленному на фиг.1, с той лишь разницей, что зонд перемещается в глубину океана.
В частности, при зондировании атмосферы направляют на зондирующий объект электромагнитную волну СВЧ-диапазона и акустическую волну совместно, вычисляют вертикальные профили скорости электромагнитной волны и скорости звука, определяют давление на поверхности земли, и по этим данным судят о вертикальных профилях температуры и влажности атмосферы.
Исходя из известных соотношений, определяющих скорость звука и индекс преломления для атмосферы [3, 4], можно получить следующие соотношения для абсолютной температуры Т и влажности e воздуха (парциального давления водяного пара):

где 



p - атмосферное давление на поверхности земли; γ - показатель адиабаты, R - универсальная газовая постоянная; μ - молекулярный вес сухого воздуха; С, N - измеренные скорость звука и индекс преломления.
Вообще говоря, величина Т0 определяется скоростью звука в неподвижной среде. При наличии ветра скорость звука (относительно неподвижного наблюдателя) будет зависеть и от скорости ветра. Поэтому в общем случае необходим контроль этой скорости.
В частности, возможно определение скорости ветра по траектории движения зонда - либо известными методами(например, с помощью радиолокатора), либо в соответствии с пунктами 5, 6 формулы данного изобретения.
Следует отметить, что для восстановления профилей температуры и влажности может использоваться и некоторый «комплексный» подход, не зависящий от скорости ветра. Пусть в качестве зонда используется известный метеорологический радиозонд, снабженный датчиком температуры Т. Если на этот зонд направить только электромагнитную волну СВЧ-диапазона, то в соответствии с изложенным выше, можно определить вертикальный профиль индекса преломления. Тогда, с учетом данных о вертикальном профиле температуры, можно восстановить и профиль влажности. В этом случае может быть обеспечена существенно более высокая точность, чем в случае использования стандартных датчиков влажности, особенно, при низких температурах и малых влажностях.
Выше рассматривались измерения в атмосфере. В то же время, предложенный подход применим и для измерений в океане. В частности, при зондировании океана направляют на зондирующий объект электромагнитную волну светового диапазона и акустическую волну совместно и вычисляют вертикальные профили скорости электромагнитной волны (показателя преломления) и скорости звука, по этим профилям судят о вертикальных профилях характеристик океана, определяющих скорость распространения указанных волн. Следует отметить, что для океана указанные профили зависят от давления, температуры, солености достаточно сложным образом, так что для однозначного определение какой-то из этих характеристик требуются дополнительные независимые измерения (например, температуры и давления).
Измерение профиля скорости звука производится совершенно аналогично случаю измерений в атмосфере. Для показателя преломления ситуация несколько иная. Поскольку электромагнитные волны СВЧ-диапазона имеют крайне высокое затухание в морской воле, то следует использовать лазерное излучение (светового диапазона) соответствующей длины волны. Лазерный пучок модулируется по интенсивности двумя частотами. Одна из них, высокочастотная, соответствует СВЧ-диапазону (и аналогична несущей частоте f1 при измерениях в атмосфере). Другая частота модуляции аналогична частоте f2 при измерениях в атмосфере.
В частности, предлагаемый подход может использоваться и в схемах, аналогичных радиоакустическому зондированию [2]. В этом случае в качестве зондирующего объекта 5 (фиг.1) выбирают акустический волновой пакет и вычисляют вертикальный профиль скорости распространения электромагнитной волны, а профиль скорости звука определяют по профилю сдвига частоты f1 с учетом профиля скорости распространения электромагнитной волны. При зондировании атмосферы электромагнитную волну выбирают в СВЧ-диапазоне, а при зондировании океана - в световом диапазоне.
Выше неявно полагалось, что высота зондирующего объекта известна в любой момент времени. Рассмотрим теперь возможности определения этой высоты, а также других координат этого объекта по параметрам принятых на земле сигналов - акустических или электромагнитных волн.
Если зондирующий объект имеет не только вертикальную компоненту скорости vz, но и горизонтальную vx, то его скорость vз относительно неподвижного наблюдателя на земле имеет вид:  , где α - угол места. Положим, что мы нашли зависимость скорости волны от времени C(t). Тогда по сдвигу, например, несущей частоты можно найти и
, где α - угол места. Положим, что мы нашли зависимость скорости волны от времени C(t). Тогда по сдвигу, например, несущей частоты можно найти и  . Если проинтегрировать это выражение, то в результате получим:
. Если проинтегрировать это выражение, то в результате получим:

где L - наклонная дальность,  - некоторые средние значения скорости и длины волны на трассе L; Ф(t) - полная (интегральная) разность фаз принятой («доплеровской») и исходной частот fp1 и f1; Ф=(Np1-N1), где Np1, N1 - количество периодов «доплеровской» и исходной частот за время регистрации t.
- некоторые средние значения скорости и длины волны на трассе L; Ф(t) - полная (интегральная) разность фаз принятой («доплеровской») и исходной частот fp1 и f1; Ф=(Np1-N1), где Np1, N1 - количество периодов «доплеровской» и исходной частот за время регистрации t.
То есть, для различных моментов времени находят интегральный сдвиг фазы волны, переизлученной объектом, на несущей частоте, и по этому сдвигу из соотношения (4) определяют наклонную дальность до зондирующего объекта.
Для измерений в атмосфере по СВЧ-сигналу можно пренебречь искривлением траекторий распространения волн вследствие их рефракции. Тогда абсолютная погрешность определения наклонной дальности примерно равна длине волны. Для измерений в атмосфере или океане по акустическим волнам относительная погрешность определения наклонной дальности возрастает с увеличением высоты (глубины). Однако для реальных условий она не превосходит 10-2.
Рассмотрим теперь возможности определения угла места по измерению разности фаз сигналов в двух точках на земле, разнесенных на известное расстояние 1, причем 1≪L1, L2 (фиг.2). Нетрудно видеть, что разность фаз  определяется соотношением:
определяется соотношением:
 Соотношение (5) соответствует полной разности фаз, с учетом различных, вообще говоря, частот для каждого из приемников. Тот же самый результат получается, если разность фаз найти интегрированием соответствующей разности частот.
Соотношение (5) соответствует полной разности фаз, с учетом различных, вообще говоря, частот для каждого из приемников. Тот же самый результат получается, если разность фаз найти интегрированием соответствующей разности частот.
Итак, зная k, l и измерив полную разность фаз , нетрудно найти и угол места αх в плоскости XOZ: .
.
Для измерений в атмосфере по СВЧ-сигналу абсолютную погрешность определения угла места можно оценить следующим образом:  . Для измерений в атмосфере или океане по акустическим волнам относительная погрешность определения αх возрастает с увеличением высоты (глубины). Однако для реальных условий она не превосходит 10-2.
. Для измерений в атмосфере или океане по акустическим волнам относительная погрешность определения αх возрастает с увеличением высоты (глубины). Однако для реальных условий она не превосходит 10-2.
Выше неявно полагалось, что зонд движется в плоскости XOZ. В общем случае необходима еще одна пара приемников для регистрации угла αу и в плоскости YOZ. По измеренным значениям углов αx и αу нетрудно определить азимут ψ и угол места α0:

To есть переизлученную объектом волну регистрируют двумя парами приемников, каждая из которых разнесена на известное расстояние в направлении одной из осей координат, определяют для каждой пары разность фаз несущей частоты и по измеренным значениям разностей фаз на основе соотношений (5-6) вычисляют азимут и угол места зондирующего объекта. Зная L и  , нетрудно вычислить и высоту z зонда, z=Lsinα0.
, нетрудно вычислить и высоту z зонда, z=Lsinα0.
Таким образом, предлагаемый способ позволяет обеспечить зондирование атмосферы или океана (независимое измерение вертикальных профилей скорости звука или показателя преломления) с достаточно высокой точностью. При этом возможно определение координат зонда по параметрам принятых сигналов. Практическая реализация такого рода измерений может быть значительно более простой, чем в известных способах.
Источники информации
1. Патент 2105955 РФ, МКИ G 01 H 5/00, 1998 г.
2. Патент 2196345 РФ, МКИ G 01 S 13/95, 2003 г.
3. Каллистратова М.А., Кон А.И. Радиоакустическое зондирование атмосферы. М.: Наука, 1985. - 197 с.
4. Казаков Л.Я., Ломакин А.Н Неоднородности коэффициента преломления в воздухе. М.: Наука, 1976. - 165 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОАКУСТИЧЕСКОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2000 |
|
RU2196345C2 |
| СПОСОБ РАДИОАКУСТИЧЕСКОГО НАКЛОННОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 1999 |
|
RU2152055C1 |
| Радиоакустический способ определения влажности воздуха | 1989 |
|
SU1670641A1 |
| Способ радиоакустического зондирования атмосферы | 1977 |
|
SU671535A1 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ВОЛНЕНИЯ ВОДНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2562924C1 |
| Способ управления частотой электромагнитного излучения при радиоакустическом зондировании атмосферы | 1983 |
|
SU1130809A1 |
| Способ и система определения скорости локомотива и направления движения | 2023 |
|
RU2808863C1 |
| СПОСОБ КАЛИБРОВКИ И ПОВЕРКИ ДОПЛЕРОВСКОГО РАДИОЛОКАТОРА ПРОФИЛЕЙ ВЕТРА | 2012 |
|
RU2502083C1 |
| СПОСОБ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТИ ВЕТРА | 2011 |
|
RU2469361C1 |
| Способ радиоакустического зондирования атмосферы | 1987 |
|
SU1451628A1 |
Изобретение относится к измерительной технике и может использоваться для зондирования атмосферы или океана - определения вертикального профиля скорости звука или показателя преломления. Технический результат: упрощение реализации измерений, повышение их точности, а также обеспечение возможности независимого определения как профиля скорости звука, так и профиля показателя преломления в атмосфере или в океане. Сущность: в среде создают движение зондирующего объекта, направляют на этот объект модулированную акустическую или электромагнитную волну, содержащую такие частоты f1 и f2, что f1≥C/h, а f2≤С/Н, где С - средняя скорость волны в исследуемой среде, h - требуемое пространственное разрешение, Н - максимальная дальность измерений. Определяют для частот f1 и f2, переизлученных объектом, соответствующие относительные доплеровские сдвиги при различных положениях объекта. Находят отношение этих сдвигов. По этому отношению вычисляют вертикальный профиль скорости распространения волны. В частности, в качестве зондирующего объекта выбирают акустический волновой пакет и вычисляют вертикальный профиль скорости распространения электромагнитной волны. Профиль скорости звука определяют по профилю сдвига частоты f1 с учетом профиля скорости распространения электромагнитной волны. В частности, для различных моментов времени находят интегральный сдвиг фазы волны, переизлученной объектом, на несущей частоте, и по этому сдвигу определяют наклонную дальность до зондирующего объекта. В частности, по параметрам принятых сигналов вычисляют азимут и угол места зондирующего объекта. Технический результат: упрощение, повышение точности, обеспечение возможности независимого определения профиля скорости звука и профиля показателя преломления. 5 з.п. ф-лы, 2 ил.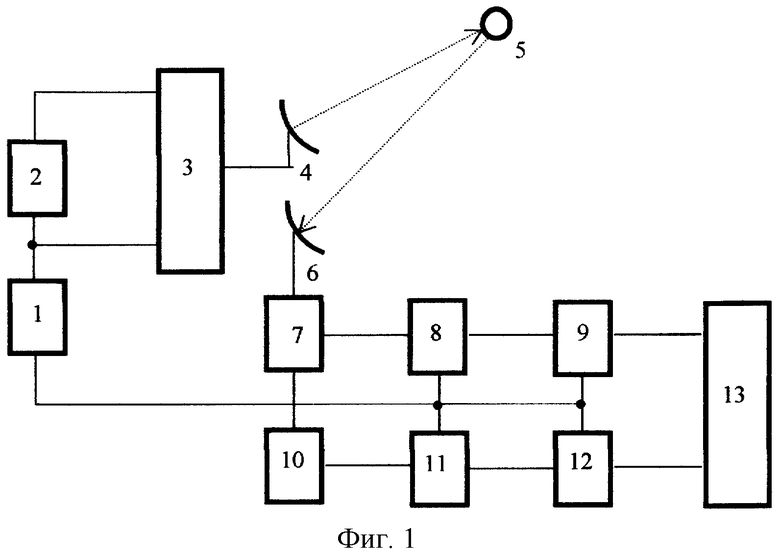
| СПОСОБ ВЫХОДА РОТОРНО-ВИНТОВОЙ АМФИБИИ НА СУШУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2193495C1 |
| Генератор случайного процесса | 1987 |
|
SU1451688A1 |
| Радиоакустический способ измерения температуры и скорости ветра в атмосфере | 1989 |
|
SU1709263A1 |
| US 4761650 A, 02.08.1988 | |||
| DE 3608691 C1, 21.05.1987. | |||

