Изобретение относится к радиолокации и связи и может быть использовано для дистанционной регистрации вертикальных профилей влажности воздуха при проектировании трасс радиорелейных линий связи, при исследованиях условий распространения УКВ в тропосфере, при метеообеспечении нужд народного хозяйства (прогнозы погоды, охраны воздушного бассейна и т.п.).
Целью изобретения является повышение точности и уменьшение времени измерений.
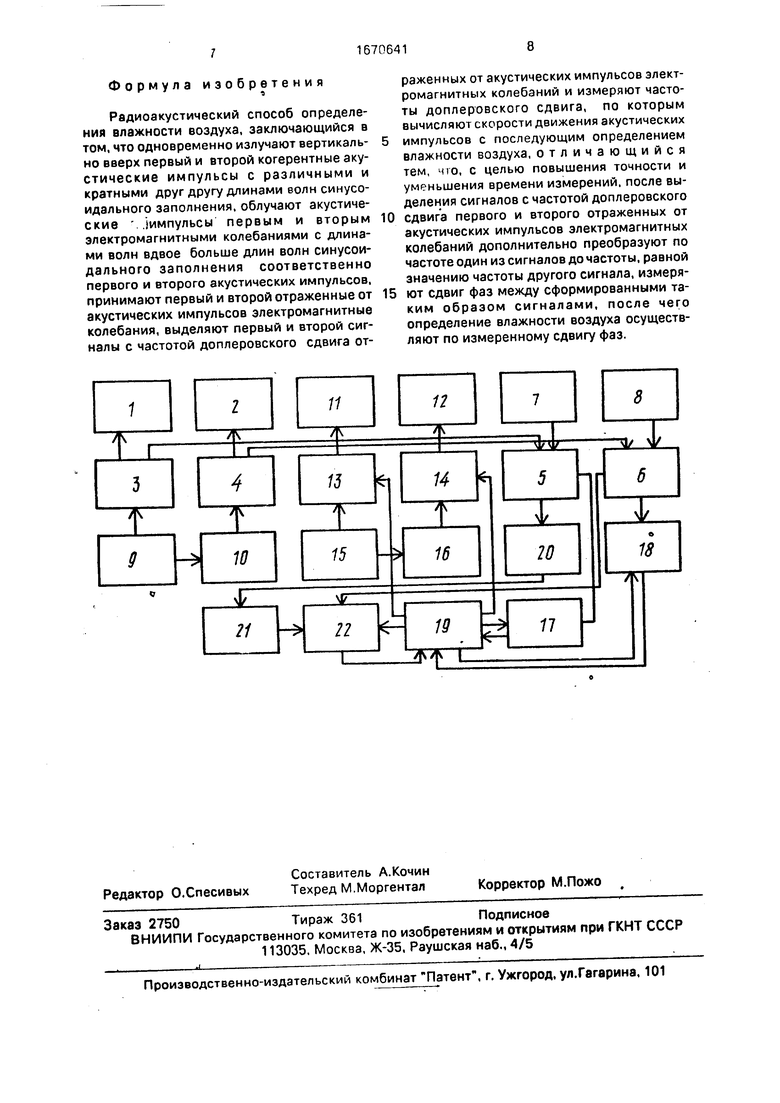
На чертеже приведена структурная электрическая схема устройства для реализации способа.
Устройство для реализации способа содержит передающие антенны 1 и 2, радиопередатчики 3 и 4, радиоприемники 5 и 6, приемные антенны 7 и 8, опорный генератор 9, преобразователь 10 высокой частоты, акустические излучатели 11 и 12, усилители 13 и 14 звуковых частот, генератор 15 звуковой частоты, преобразователь 16 звуковой частоты, частотомеры 17 и 18, микроЭВМ 19, преобразователь 20 частоты доплеровского сдвига, регулируемый фазовращатель 21, измеритель 22 сдвига фаз.
Сущность способа заключается в следующем.
ON VJ
О ON
При распространении звуковых волн различной частоты в средах, в частности в газах.наблюдается дисперсия скорости звука, возникающая в случае, когда действие акустической волны приводит к неравновесному состоянию среды, возбуждая внутренние степени свободы. Перераспределение энергии между поступательными и внутренними степенями свободы происходит за некоторый промежуток времени г, который называется временем релаксации. В газах время релаксации зависит от температуры газа, его давления и наличия примесей других газов. В атмосферном воздухе роль такой примеси выполняет водяной пар.
Частота релаксации fp - влажного воздуха связана с влажностью выражением
fp 3,06 Ю4 -h1-3, Гц,(1)
где h е/р - отношение пропорционального давления водяного пара к полному давлению воздуха.
Частоту релаксации можно найти из выражения, описывающего связь скорости звука в газе произвольной частоты с релаксационными процессами и имеющего вид
Со2 + (Соо2-Со2)
(2)
где Со - скорость звука при малых частотах;
Coo скорость звука при очень больших частотах;
О) 2 л f (f - частота звука).
В атмосфере при вертикальном распространении звука его скорость может быть вычислена по выражению
Ci |/ Со2 + ( Соо2- Со2) . ± W2 ,
1 + а
Ч
где Wz - вертикальная составляющая скорости ветра.
Для исключения пространственно временной неоднородности температуры воздуха и скорости ветра на результаты определения частоты релаксации fp путем измерения скорости звука доплеровским радиолокатором необходимо измерить скорость акустических волн двух различных частот, одновременно распространяющихся в атмосфере.
Разность скоростей звука одной частоты при распространении в сухом воздухе и при 100% относительной влажности невелика, а поэтому изменение величины допле- ровского сдвига частоты при измерении скорости звука доплеровским радиолокатором для этих крайних случаев не превышает 1-2 Гц.
Диапазон изменения относительной влажности, например, для умеренных широт лежит в пределах (30-90)%. При разрешающей способности измерения
влажности около 6% (для штатных метеодатчиков широкого применения - гигрометров - эта величина составляет 5-7% относительной влажности) необходимо обеспечить 10 отсчетов влажности, т.е. раз0 решающая способность измерения частоты должна быть примерно равной 0,1-0,2 Гц. Измерение частоты с таким малым различием представляет собой сложную техническую задачу. Однако небольшое различие в
5 скоростях звука при его дисперсии можно произвести путем регистрации сдвига фаз между.сигналами с частотами доплеровского сдвига принимаемых радиосигналов;
0 iPz-fPi Др 2яг (
h -Ci -fi -C2
0
2яг
-c7j
(4)
Ci C2 где г - расстояние;
Ci и C2 - скорости звука на частотах fi и h.
5 Звуковые колебания с частотой fi и h являются модулирующими для отраженных радиосигналов, несущими информацию об атмосфере. Выделяемые на выходе приемника частоты доплеровских сдвигов при вы0 полнении условия Брэгга, т.е. равенства длин волн синусоидального заполнения акустических импульсов удвоенной длине волны электромагнитного излучения, равны соответственно fi - fgi и f2 - fg2- Поскольку
5 измерение сдвига фаз обычно производится для колебаний с одинаковыми частотами, а при двухчастотном радиоакустическом зондировании выделяются две различные частоты доплеровского сдвига fgi и тд2,одну из них, например, fgi, преобразуютс помощью целочисленного коэффициента преобразования k 1, на который различаются длины волн синусоидального заполнения акусти5 ческих импульсов, соответствующие звуковым частотам f 1 и h. так гтобы fgi k f02. В этом случае выражение (4) можно записать следующим образом.
0
(-г()
2яГ т
АС С
(5)
где С - средняя скорость звука. Формула, позволяющая по измеренному сдвигу фаз вычислить влажность воздуха, имеет вид в - Р ехр{Ь,385 х
xtnr ) 1-7.947}. (6) с3 Ар
где е и р - выражены в миллибарах.
Устройство, реализующее способ, ряfir- тает следующим образом.
В микроЭВМ 19 с периферийными устройствами вывода данных записывается программа в соответствии с выражением (6), значения Соо (рассчитываемые по формуле Лапласа для скорости звука при конкретном значении приземной температуры воздуха, при которой производится определение влажности, или иным способом) и Со (уменьшаемое на величину 0,032% от Софначения зондирующих частот звука (fi и fa), значение частоты f, на которой ведется измерение сдвига фаз, расстояние г, на котором определяется влажность воздуха и приземное значение давления возд/ха р, измеряемого барометром Програмг-з зондирования содержит также команды форми- рования длительности акустических импульсов в усилителях 13 и 14 ЗЕ УКОВЬ.Л частот (начала и конца акустических импульсов), запуска частотомеров 17 и 18 и измерителя 22 сдвига фаз, а также подпрограммы расчета скоростей распространения акустических импупьсов по измеренным значениям частоты доплеровского сдвига по известному соотношению С fg Я /2 , где Я - длина волны радиолокатора, и расчета давления на высоте г по барометрической формуле.
Колебания высокой частоты, генерируемые опорным генератором 9, поступают на вход радиопередатчика 3 и преобразователь 10 высокой частоты, в котором осуществляется преобразование (умножение) высокой частоты с целочисленным коэффи циентом кратности (к 1). например, к 2, с выхода преобразователя 10 высокой частоты электрические колебания удвоенной частоты поступают на вход радиопередатчика 4. В радиопередатчш ах 3 и 4 осуществляется формирование электрических колебаний радиочастот, генерируемых непрерывно, которые с помощью передающих антенн 1 и 2 излучаются вертикально вверх в атмосферу. Генератор 15 звуковой частоты генерирует электрические колебания звуковой частоты (генератор имеет возмог ность изменения значения генерируемой частоты), эти колебания подаются на усилитель 13 звуковой частоты и на преобразователь 16 звуковой частоты, который преобразует (умножает) поступающую на него частоту с выбранным выше коэффициентом кратности (к 2). Колебания генератора 15 звуковой частоты усиливаются усилителем 13 звуковой частоты, а удвоенные колебания звуковой частоты усиливаются усилителем 14 звуковой частоты. По импульсам генерируемым микроЭВМ 19, в усили1влях 13 и 14 звуковых частот форми- рукл ся мощные пакет ы электрических колебаний звуковой частоты(например, снятием и подачей анодного напряжения на выходные каскады усилителей 13 и 14 звуковых чагют, псдлчей смещения и т.п.), которые
0 подаются на входы акустических излучателей 11 и 12, а после преобразования излучаются ими вертикапьно вверх в атмосферу в виде зк/с и еских импульсов с синусоидальным заполнением и различными дли5 нам волн заполнения. Отраженные неодн ородноггяп1 ымосферы, вызванными прохождением а стических импульсов с различными длинами волн синусоидального заполнения, элект; омагнитные колеба0 чь- принимаются приемными-антеннами 7 и S которые преобразуют их в электрические колебания, поступающие в свою очередь на выходы радиоприемников 5 и б, где происходит усиление принимаемых сигна5 лов и выделение частот доплеровского сдвига этих сигналов (с помощью напряжений радиочастот , поступающих на входы радиоприемников 5 и 6 от радиопередатчиков 3 и 4 соответственно) Частоты доплеровского
0 сдвига принятых радиолокационных сигналов польются на частотомеры 17 и 18, где производится измерение значений частот; по окончании измерения частотомеры 17 и 18 подают на соответствующие входы мик5 роЭВМ импульсы Конецизмерения, после чего осуществляется считывание значений доплеровского сдвига частоты с выходов частотомеров 17 и 18 и запись их в память микроЭВМ 19. С второго выхода радиопри0 емннка 5 колебания частоты доплеровского сдоига подаются на вход преобразователя 20 чтсготы, где они преобразовываются (умножаются) с коэффициентом кратности к 2, поступают далее на регулируемый фазов5 ращатель 21, служащий для компенсации набега фазы в лреобразо теле 20. С фазов- ращателя 21 преобразоь чные колебания доплеровского сдвига час.эты поступают на первый вход измерителя 2k сдвига фаз,
0 на второй вход котооого поступают колебания частоты доплеровского сдвига с второго выхода радиоприемника 6. По команде микроЭВМ 19 измеритель 22 сдвига фаз измеряет сдвиг фаз колебаниями частот
5 доплеровского сдвига, после чего значение сдвига фаз записывается в память микроэвм 19 Определение значения влажности расчетным путем выполняет микроЭВМ 19, в дальнейшем это значение выводится на печать или на перфорацию.
Формула изобретения
Радиоакустический способ определения влажности воздуха, заключающийся в том, что одновременно излучают вертикально вверх первый и второй когерентные акустические импульсы с различными и кратными друг другу длинами волн синусоидального заполнения, облучают акустические ,.)импульсы первым и вторым электромагнитными колебаниями с длинами волн вдвое больше длин волн синусоидального заполнения соответственно первого и второго акустических импульсов, принимают первый и второй отраженные от акустических импульсов электромагнитные колебания, выделяют первый и второй сигналы с частотой доплеровского сдвига отраженных от акустических импульсов электромагнитных колебаний и измеряют частоты доплеровского сдвига, по которым вычисляют скорости движения акустических
импульсов с последующим определением влажности воздуха, отличающийся тем, чю, с целью повышения точности и уменьшения времени измерений, после выделения сигналов с частотой доплеровского
сдвига первого и второго отраженных от акустических импульсов электромагнитных колебаний дополнительно преобразуют по частоте один из сигналов до частоты, равной значению частоты другого сигнала, измеряют сдвиг фаз между сформированными таким образом сигналами, после чего определение влажности воздуха осуществляют по измеренному сдвигу фаз.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиоакустический способ зондирования атмосферы | 1989 |
|
SU1658105A1 |
| СПОСОБ РАДИОАКУСТИЧЕСКОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2000 |
|
RU2196345C2 |
| Способ определения влажности воздуха радиоакустическим зондированием атмосферы | 1990 |
|
SU1780071A1 |
| СПОСОБ РАДИОАКУСТИЧЕСКОГО НАКЛОННОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 1999 |
|
RU2152055C1 |
| Способ радиоакустического зондирования атмосферы | 1987 |
|
SU1451628A1 |
| Устройство измерения параметров перемещения спортсмена | 1987 |
|
SU1500327A1 |
| Способ управления частотой электромагнитного излучения при радиоакустическом зондировании атмосферы | 1983 |
|
SU1130809A1 |
| Способ измерения влажности воздуха | 1976 |
|
SU656004A1 |
| Способ измерения распределения скорости звука в жидких средах | 2014 |
|
RU2626579C2 |
| СПОСОБ ЗОНДИРОВАНИЯ АТМОСФЕРЫ ИЛИ ОКЕАНА | 2003 |
|
RU2267139C2 |
Изобретение относится к радиометеорологии. Цель изобретения - повышение точности измерений и уменьшение времени зондирования. Поставленная цель достигается тем, что акустические излучатели излучают вертикально вверх когерентные акустические импульсы /АИ/ с синусоидальным заполнением и различными длинами волн. Радиопередатчиками с помощью передающих антенн облучают АИ когерентными электромагнитными колебаниями с длинами волн синусоидального заполнения акустических импульсов, принимают приемными антеннами эхо-сигналы, выделяют и измеряют частоты доплеровского сдвига каждого принятого сигнала радиоприемниками и частотомерами соответственно, вычисляют скорость распространения акустических импульсов, преобразуют одну из выделенных частот преобразователем так, чтобы преобразованная частота стала равной другой частоте, измеряют сдвиг фаз между ними и по зависимости сдвига фаз между АИ от влажности воздуха определяют значение влажности. 1 ил.
| Калистратова М.А., Кон А.И | |||
| Радиоакустическое зондирование атмосферы | |||
| М.: Наука | |||
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| с | |||
| Складная решетчатая мачта | 1919 |
|
SU198A1 |
| Бабкин С.И | |||
| и др | |||
| Измерение влажности воздуха радиоакустическим зондированием атмосферы | |||
| Труды IX Всесоюзного симпозиума по лазерному и акустическому зондиро- ванию атмосферы | |||
| Ч.II | |||
| Исследование метеопараметров атмосферы | |||
| Томск | |||
| ИОА СО АН СССР | |||
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| с | |||
| Заслонка для русской печи | 1919 |
|
SU145A1 |
