Это изобретение относится в основном к способам формирования гидравлического разрыва пласта, сообщающегося со скважиной, такого как углеводородоносный пласт, пересекаемый нефтедобывающей или газодобывающей скважиной.
Возможны различные приложения разрывов, формируемых в подземных пластах. В нефтяной и газовой промышленности, например, можно формировать разрывы в углеводородоносном пласте для облегчения добычи нефти или газа через скважину, сообщающуюся с этим пластом.
Разрывы можно формировать путем закачивания жидкости для гидравлического разрыва в скважину к выбранной поверхности пласта, пересекаемого этой скважиной. Закачивание осуществляют так, что к пласту прикладывается достаточное гидравлическое давление для разламывания или разделения грунтового материала с целью инициирования разрыва в пласте.
В типичном случае разрыв приводит к появлению узкого проема, который проходит вбок от скважины. Для предотвращения слишком быстрого смыкания такого проема после прекращения действия давления жидкости для гидравлического разрыва жидкость для гидравлического разрыва в типичном случае несет в себе некоторый материал в виде гранул или крупных частиц, называемый «расклинивающим наполнителем», в проем разрыва. Этот расклинивающий наполнитель остается в разрыве после завершения процесса формирования гидравлического разрыва. В идеальном случае расклинивающий наполнитель в разрыве удерживает разделенные грунтовые стенки пласта на расстоянии друг от друга, оставляя разрыв открытым, и обеспечивает пути протекания, по которым углеводороды из пласта могут течь с повышенными скоростями по сравнению со скоростями течения через неразорванный пласт.
Такой процесс формирования гидравлического разрыва предназначен для стимуляции (т.е. увеличения) добычи углеводородов из разорванного пласта. К сожалению, это не всегда возможно, поскольку процесс формирования разрыва пласта может скорее нарушить пласт, чем способствовать увеличению добычи из него.
Один вид такого нарушения называют состоянием выпадения песка. В этом состоянии расклинивающий наполнитель закупоривает разрыв, так что приток углеводородов и пласта скорее уменьшается, нежели увеличивается. В еще одном примере формирование гидравлического разрыва может происходить нежелательным образом, вследствие чего разрыв может распространяться вертикально в соседнюю заполненную водой зону. Ввиду этого существует потребность в способе формирования гидравлического разрыва пласта, который обеспечивает регулирование процесса гидравлического разрыва пласта в реальном масштабе времени.
Ниже приводится описание того, как можно уменьшить влияние вышеупомянутых проблем или, по существу, преодолеть их.
В соответствии с настоящим изобретением предложен способ формирования гидравлического разрыва пласта, заключающийся в том, что в течение, по меньшей мере, части периода времени проведения работы по формированию гидравлического разрыва закачивают жидкость для гидравлического разрыва в скважину для инициирования или расширения разрыва в пласте, с которым эта скважина сообщается, в течение периода времени проведения работы по формированию гидравлического разрыва генерируют сигналы в ответ на определение, по меньшей мере, одного размера разрыва и в течение периода времени проведения работы по формированию гидравлического разрыва дополнительно закачивают жидкость для гидравлического разрыва в скважину в ответ на генерируемые сигналы, предусматривая при этом осуществляемое в ответ на генерируемые сигналы регулирование, по меньшей мере, одного из таких параметров, как скорость нагнетания насоса при дополнительном закачивании и вязкость дополнительно закачиваемой жидкости для разрыва пласта.
Настоящее изобретение соответствует вышеупомянутым требованиям, поскольку в нем предложен способ формирования разрыва пласта таким образом, что подавляется риск резко возрастающей производительности добычи углеводородов в результате гидравлического разрыва. Указанный способ заключается в том, что в течение, по меньшей мере, части периода времени проведения работы по формированию гидравлического разрыва закачивают жидкость для гидравлического разрыва пласта в скважину для инициирования или расширения разрыва в пласте, с которым эта скважина сообщается, в течение периода времени проведения работы по формированию гидравлического разрыва пласта генерируют сигналы в ответ на определение, по меньшей мере, одного размера разрыва пласта и в течение периода времени проведения работы по формированию гидравлического разрыва дополнительно закачивают жидкость для гидравлического разрыва в скважину в ответ на генерируемые сигналы, предусматривая при этом осуществляемое в ответ на генерируемые сигналы регулирование, по меньшей мере, одного из таких параметров, как скорость нагнетания насоса при дополнительном закачивании и вязкость дополнительно закачиваемой жидкости для гидравлического разрыва.
Генерирование сигналов предпочтительно предусматривает измерение высоты или ширины разрыва или обоих этих размеров. Это можно осуществить, например, с помощью устройств для измерения наклона, расположенных в скважине.
Вязкость можно регулировать путем изменения вязкости жидкой фазы жидкости для гидравлического разрыва пласта; кроме того, или в качестве альтернативы, вязкость можно регулировать путем изменения концентрации фазы крупных частиц в жидкости для гидравлического разрыва пласта.
Регулирование в ответ на генерируемые сигналы может предусматривать сравнение измеренной величины соответствующего размера разрыва, отображаемой генерируемыми сигналами, с предварительно определенной смоделированной величиной того же самого размера.
Для более ясного понимания изобретения некоторые предпочтительные варианты его осуществления будут описаны ниже со ссылками на прилагаемые чертежи.
На фиг.1 изображено условное сечение скважины, подвергающейся воздействию посредством формирования гидравлического разрыва пласта в соответствии с настоящим изобретением, и условная схема соответствующего оборудования.
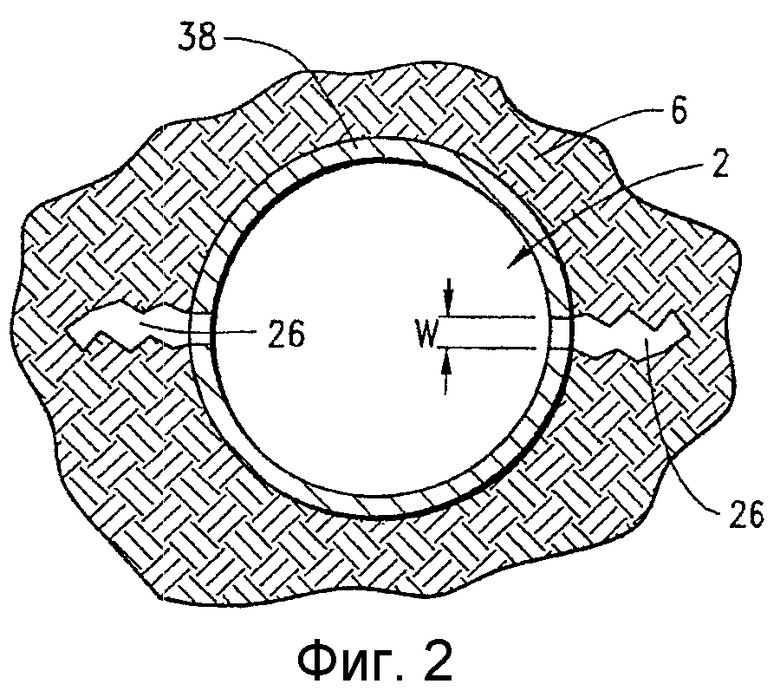
На фиг.2 изображено сечение ствола скважины и обсадной трубы скважины, показанной на фиг.1, и на этом сечении представлены оба «крыла» разрыва, а также размер его ширины.
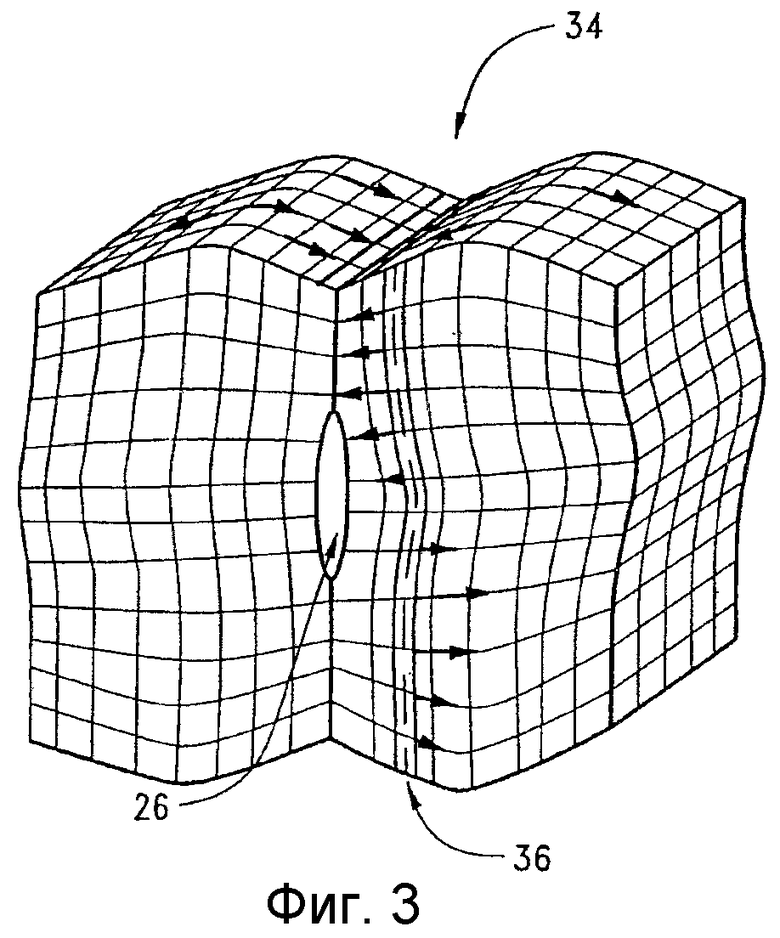
На фиг.3 представлено графическое представление, иллюстрирующее отклики устройства для измерения наклона на подземный разрыв.
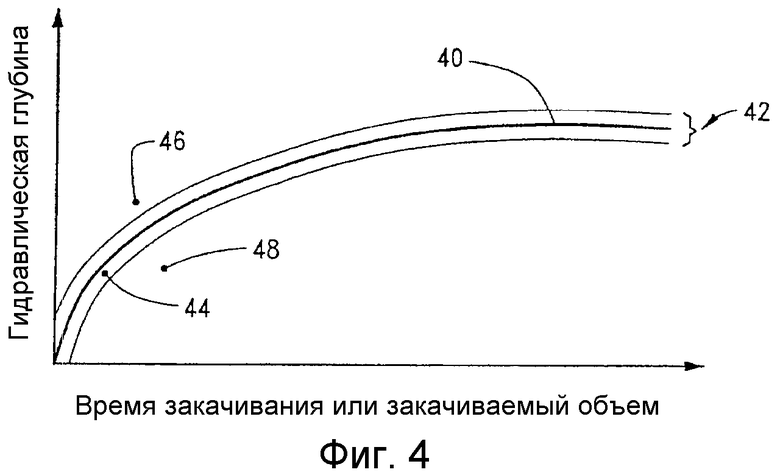
На фиг.4 приведено графическое представление зависимости между гидравлической шириной (разрыва) и временем закачивания или объемом закачивания жидкости для гидравлического разрыва пласта.
Обращаясь к фиг.1, отмечаем, что обсаженная или необсаженная скважина 2, сформированная в грунте 4 (под поверхностью земли или морского дна) известным образом, сообщается с подземным пластом 6. В частности, на фиг.1 показано, что скважина 2 пересекает пласт 6 таким образом, что, по меньшей мере, часть ствола скважины ограничена участком пласта 6. К такому участку пласта 6 для его разрыва можно приложить воздействие жидкости для гидравлического разрыва, направляемой из системы 8 подачи жидкости для гидравлического разрыва. В одном типовом примере реализации этой возможности трубу или колонну 10 труб подачи жидкости для разрыва пласта обычно располагают в скважине 2 и устанавливают скважинный регулятор 12 дебита (верхний пакер) и пакер 14 забоя скважины (нижний пакер) или другие подходящие средства для выбора и изоляции конкретной поверхности пласта 6, к которой следует подавать жидкость для гидравлического разрыва пласта через одно или более отверстий в трубе или колонне 10 труб или для обсаживания или цементирования либо иного предотвращения течения в выбранный участок пласта 6 (например, через перфорационные отверстия 15, выполненные посредством процесса перфорации, известного в данной области техники). Эта поверхность может охватывать всю высоту пласта 6 либо его участок или зону.
Устройство 8 подачи жидкости для гидравлического разрыва сообщается с трубой или колонной 10 труб известным образом, так что жидкость для гидравлического разрыва можно закачивать вниз по этой трубе или колонне 10 труб к выбранной части пласта 6, что отображено идущей вниз линией 16 на фиг.1. Устройство 8 подачи жидкости для гидравлического разрыва включает в себя подсистему 18 подготовки жидкости, подсистему 20 подготовки расклинивающего наполнителя, насосную подсистему 22 и контроллер 24.
Подсистема 18 подготовки жидкости обычного типа, как правило, включает в себя смеситель и источники известных веществ, добавление которых в смеситель осуществляется известным способом и регулируется контроллером 24 или органом регулирования, находящимся внутри подсистемы 18 подготовки жидкости, для получения жидкой или гелеобразной основы жидкости для гидравлического разрыва пласта, имеющей требуемые жидкостные свойства (например, вязкость, качество жидкости).
Система 20 подготовки расклинивающего наполнителя известного типа включает в себя расклинивающий наполнитель в одном или нескольких устройствах для хранения расклинивающего наполнителя, транспортную установку для транспортировки расклинивающего наполнителя из устройства (устройств) для хранения расклинивающего наполнителя в жидкость для гидравлического разрыва пласта из подсистемы 18 подготовки жидкости, а также устройство, регулирующее пропорции и реагирующее на сигналы контроллера 24, осуществляя приведение в движение транспортной установки с требуемой скоростью, что способствует введению требуемого количества расклинивающего наполнителя в жидкость для получения требуемой концентрации расклинивающего наполнителя или крупных частиц в жидкости для гидравлического разрыва пласта.
Насосная подсистема 22 обычного типа включает в себя ряд поршневых насосов, которые принимают смесь или суспензию основы и расклинивающего наполнителя жидкости и впрыскивают ее как жидкость для гидравлического разрыва пласта под давлением в устье скважины 2. Работу насосов насосной подсистемы 22, показанной на фиг.1, регулирует контроллер 24.
Контроллер 24 включает в себя аппаратные средства и программные средства (например, программируемый персональный компьютер), которые позволяют специалистам-практикам регулировать подсистемы подготовки жидкости и подготовки расклинивающего наполнителя, а также насосной подсистемы, которые обозначены позициями 18, 20, 22. Данные процесса формирования гидравлического разрыва пласта, включая данные в реальном масштабе времени, получаемые из скважины и вышеупомянутых подсистем, принимаются и обрабатываются контроллером 24 для обеспечения отображения информации оперативного контроля и другой информации для специалиста-практика или оператора, а также для выдачи сигналов регулирования в подсистемы либо вручную (например, посредством ввода их оператором), либо автоматически (например, посредством программ, заложенных в контроллере 24, который автоматически срабатывает в ответ на упомянутые данные в реальном масштабе времени). Аппаратные средства могут быть обычными, как и программные средства, за исключением той степени, в которой аппаратные средства или программные средства адаптированы к осуществлению обработки, требуемой в данном случае в связи с настоящим изобретением. Специалисты в данной области техники смогут провести конкретную адаптацию (конкретные адаптации) в соответствии с принципами, изложенными в данном описании.
На фиг.1 также показан датчик 28 давления (изображен один датчик, но можно использовать совокупность датчиков). Давление в забое можно измерять либо непосредственно с помощью датчика 28 давления, либо посредством процесса определения этого давления по результатам считывания данных обработки на поверхности. Взаимосвязь давления в забое с давлением на поверхности хорошо известна в данной области техники и отражается следующим уравнением: ДОвЗ = ДОнП + гидростатический напор - ΔД трения, где ДовЗ - давление обработки в забое; ДОнП - давление обработки на поверхности; ΔД трения - все падения давления вдоль пути течения, вызываемые трением. Поскольку определение ΔД трения для различных жидкостей разрыва может оказаться трудным, то предпочтительно, например, измерять давление в забое непосредственно, скажем с помощью манометра, работающего в колонне (например, в оборудовании низа бурильной колонны), так что при этом исключается обсчет эффектов давлений трения. Датчик 28 давления и представляет собой такой скважинный манометр.
Такие компоненты, как упомянутые выше, могут быть обычным оборудованием, собираемым и эксплуатируемым известным способом, за исключением модификаций в соответствии с настоящим изобретением, дополнительное пояснение которых будет приведено ниже. Однако в общем случае такое оборудование эксплуатируется для проводимого в течение, по меньшей мере, части процесса формирования гидравлического разрыва пласта закачивания вязкой жидкости для гидравлического разрыва, содержащей расклинивающий наполнитель, вниз по трубе или колонне 10 труб к выбранному участку пласта 6. Когда приложено достаточное давление, жидкость для гидравлического разрыва инициирует или расширяет разрыв 26 пласта, который в типичном случае формируется в противоположных направлениях от ствола скважины 2, как показано на фиг.2 (тогда как на фиг.1 изображено лишь одно направление или «крыло» разрыва). Расширение разрыва 26 пласта со временем показано на фиг.1 в виде последовательных краев 26а-26е разрыва, постепенно отходящих от скважины 2 в радиальном направлении наружу.
Таким образом, частью настоящего изобретения является закачивание жидкости для гидравлического разрыва пласта в скважину 2 в течение, по меньшей мере, части периода времени по формированию гидравлического разрыва для инициирования или расширения разрыва 26 в пласте 6, с которым сообщается скважина 2. По меньшей мере, в течение периода времени работы по формированию гидравлического разрыва вне зависимости от того, осуществляется ли одновременно закачивание, генерируют сигналы в ответ на определение, по меньшей мере, одного размера разрыва 26 пласта. В предпочтительном варианте определяют один или оба таких размера, как высота разрыва и ширина разрыва (также называемые гидравлической высотой и гидравлической шириной). Высота разрыва пласта в типичном случае является размером в направлении, обозначенном символом «Н» на фиг.1, а ширина разрыва пласта является размером в направлении, перпендикулярном такому размеру высоты и проходящем в лист чертежа или из листа чертежа, если смотреть на фиг.1 (то есть это размер в направлении касательной к окружности скважины в противоположность длине или глубине, являющейся размером, измеряемым в радиальном направлении наружу из скважины 2 и для иллюстрации обозначенным на фиг.2 символом «W»). Сигналы генерируются в ответ на определение упомянутого размера или упомянутых размеров и такие сигналы посылаются контроллером 24 посредством любого подходящего способа передачи сигналов (например, электрического, акустического, электромагнитного, с использованием давления). Это предпочтительно осуществляется в реальном масштабе времени, когда происходит дополнительное закачивание жидкости для гидравлического разрыва пласта, или, по меньшей мере, в течение периода времени проведения работы по формированию гидравлического разрыва пласта, даже если закачивания не происходит (то есть во время проведения всей работы в целом по формированию гидравлического разрыва пласта могут наступать моменты, когда закачивание останавливают, но сбор данных при этом предпочтительно продолжают). Использование такого отображения разрыва в реальном масштабе времени позволяет изменять процесс распространения разрыва с целью уменьшения риска. Поэтому в предпочтительном варианте используют одно или несколько устройств обнаружения, работающих в реальном масштабе времени, и телеметрические системы для сбора и направления информации о геометрических параметрах разрыва в реальном масштабе времени и выдачи сигналов регулирования в контроллер 24 в ответ на указанные определенные геометрические параметры. На фиг.1 эти действия проиллюстрированы как осуществляемые совокупностью устройств 30 для измерения наклона (на чертеже их показано пять, но можно использовать любое подходящее количество), из которых данные в реальном масштабе времени передаются в контроллер 24 с помощью любых подходящих телеметрических систем 32 (например, электрических, акустических, работающих с использованием давления, электромагнитных, как упоминалось выше).
Формирование гидравлического разрыва пласта в соответствии с вышеизложенным вызывает перемещение или деформацию окружающей породы пласта, малую, но достаточную для того, чтобы совокупность сверхчувствительных устройств 30 для измерения наклона смогла определить соответствующий малый наклон. Картина наклона или деформации, наблюдаемая на поверхности грунта, позволяет выявить основное направление трещинообразования, которое может происходить на глубине до нескольких тысяч футов, что помогает бурильщикам решить вопрос о бурении дополнительных скважин. Размещая устройства для измерения наклона в стволах морских буровых скважин, также можно измерять размеры разрывов (высоту, длину и ширину). Размеры разрывов важны при определении площади продуктивного пласта, который находится в контакте с гидравлически созданным разрывом. Например, если высота разрыва пласта на двадцать пять процентов меньше прогнозируемой, то скважина может дать лишь до двадцати пяти процентов ее потенциальной добычи. Если разрыв пласта гораздо выше, чем ожидалось, то длина разрыва, вероятно, будет меньше требуемой и, в конечном счете, в результате этого может пострадать добыча. Получая возможность непосредственного измерения этих размеров, операторы скважин смогут определять, достигнуты ли требуемые размеры гидравлического разрыва.
На фиг.3 представлен пример реакции устройств для измерения наклона, таких как устройства 30 для измерения наклона при определении ориентации или направления гидравлически инициируемого вертикального разрыва (например, такого, как разрыв 26 пласта) посредством измерений. Совокупность устройств для измерения наклона, размещенных на поверхности, может обеспечить восприятие картины деформации получаемой впадины 34, которая проходит в том же направлении (т.е. имеет ту же ориентацию), что и разрыв 26 пласта, который может располагаться, например, в миле или более под поверхностью грунта. Кроме того, картину деформации, получаемую путем измерений с помощью устройств для измерения наклона, размещенных внутри скважины (в смещенной буровой скважине или в самой обрабатываемой буровой скважине, где находятся устройства 30 для измерения наклона), можно использовать для измерения высоты, ширины, а иногда и длины разрыва. Такой отклик проиллюстрирован в части чертежа, обозначенной позицией 36 на фиг.3.
Устройства для измерения наклона одного известного типа, применяемые в качестве устройств 30 для измерения наклона, имеют стеклянную трубку, заполненную жидким электролитом, содержащую пузырек газа. Датчик такого устройства для измерения наклона имеет электроды, расположенные в нем таким образом, что его схема может обеспечить обнаружение положения (или наклона) упомянутого пузырька. Имеется «общий» электрод или электрод возбуждения, а также расположенный на каждом конце «выходной» или «принимающий» электрод. Изменяющийся во времени сигнал подается на общий электрод, а каждый выходной электрод заземлен через резистор. Это обеспечивает получение резистивной мостовой схемы, в которой другие два «резистора» являются переменными, поскольку представлены соответствующими сопротивлениями участков электролита между общим электродом и каждым из двух выходных электродов. Сигналы, присутствующие на обоих выходных электродах, поступают на входы дифференциального усилителя, выходной сигнал которого выпрямляется, а также усиливается. Этот усиленный аналоговый сигнал подвергается фильтрации нижних частот и преобразуется в цифровую форму посредством аналого-цифрового преобразователя. В одной конкретной реализации сигналы данных из аналого-цифрового преобразователя передаются на поверхность в реальном масштабе времени по обычно имеющемуся одножильному электрическому кабелю и попадают в регистрирующий блок для отображения и обработки (на фиг.1 в этом конкретном качестве изображен контроллер 24); вместе с тем, можно воспользоваться и другими подходящими способами передачи сигналов.
В каждом устройстве 30 для измерения наклона используется пара таких ортогональных друг другу датчиков, а совокупность, например, от трех до двадцати устройств 30 для измерения наклона размещена на протяжении интервала разрыва, такого как показан на фиг.1 или 3 (в предпочтительном варианте устройства для измерения наклона расположены выше и ниже той изолированной области в пределах скважины, где жидкость для гидравлического разрыва подается к пласту, причем эта область находится между пакерами 12 и 14, показанными на фиг.1, а также предпочтительно охватывает диапазон нарастания высоты разрыва). В конкретной реализации устройства 30 для измерения наклона устанавливают на обсадную трубу 38 (расположенную известным способом в скважине 2) с помощью постоянных магнитов, а обсадную трубу 38 в свою очередь связывают с пластом посредством внешней цементной оболочки (которая не показана отдельно на чертежах, но известна в данной области техники), вследствие чего обсадная труба 38 будет изгибаться или деформироваться так же, как пласт 6, из-за присутствия гидравлического разрыва 26 пласта. Устройства 30 для измерения наклона в предпочтительном варианте реализации неподвижно прикреплены к обсадной трубе 38 снаружи от наиболее турбулентной части любого рядом расположенного пути протекания жидкости (на фиг.1 устройства для измерения наклона показаны снаружи от предписываемого пути 16 протекания). В необсаженной скважине необходимо некоторое соединение между устройствами для измерения наклона и стенкой ствола скважины (например, такое механическое соединение, которое могло бы быть обеспечено рессорными центраторами или децентраторами).
Сразу же после получения данных от устройств 30 для измерения наклона эти данные можно преобразовать в контроллере 24 в информацию об одном или более размерах разрыва 26 пласта. Как известно в данной области техники, можно определить, по меньшей мере, один из таких размеров, как ширина разрыва пласта и высота разрыва пласта, или оба эти размера. Ширину разрыва можно определить, например, путем интегрирования вносимого наклона от точки, в основном не затронутой разрывом (это может быть точка, находящаяся выше или ниже вертикального разрыва, точка, находящаяся на участке разрыва, но за пределами разрыва, или аналогичная точка для невертикального разрыва), до точки в центре разрыва. Интегрирование наклона вдоль некоторого участка позволяет получить суммарную деформацию на этом участке. Если сигналы снимаются в непосредственной близости к разрыву, суммарная деформация будет равной половине ширины разрыва пласта. Если между разрывом и местом съема сигналов имеется некоторая среда, картина деформации будет изменена этой средой. Такое изменение можно достоверно оценить, воспользовавшись общей моделью Грина и Снеддона (Green and Sneddon) (1950) (см. «Распределение механических напряжений в окрестности плоской эллиптической трещины в упругом твердом теле», Труды Кембриджского философского общества ("The Distribution of Stress in the Neighborhood of a Flat Elliptical Crack in an Elastic Solid," Proc. Camb. Phil. Soc., 46, 159-163).
Высоту разрыва можно определить, например, посредством наблюдения вносимого наклона от точки, в основном не затронутой разрывом, до точки, значительно затронутой ростом разрыва пласта. Если сигналы снимаются в непосредственной близости к разрыву, большой пик в наклоне будет появляться на краях разрыва. Отслеживание этого пика (этих пиков) во времени обеспечивает измерение роста краев разрыва. Если между разрывом пласта и местом съема сигналов имеется некоторая среда, картина деформации будет изменена этой средой. Такое изменение можно достоверно оценить, воспользовавшись общей моделью Грина и Снеддона (1950) (см. «Распределение механических напряжений в окрестности плоской эллиптической трещины в упругом твердом теле», Труды Кембриджского философского общества, 46, 159-163).
Вышеупомянутое преобразование (вышеупомянутые преобразования) сигнала данных устройств для измерения наклона в измеренный размер разрыва пласта можно осуществить путем соответствующего программирования контроллера 24, что хорошо известно в данной области техники и отражено в пояснении изобретения, приводимом в данном описании. Например, с помощью контроллера 24 можно реализовать таблицы преобразования или вычисления на основе математических уравнений.
Для смягчения риска резкого роста добычи углеводородов в результате всего процесса формирования гидравлического разрыва пласта в целом, например, для избежания выпадения песка или неожиданного роста разрыва осуществляют регулирование дополнительного закачивания жидкости для гидравлического разрыва в скважину 2 в ответ на генерируемые сигналы из датчиков. Сюда входит регулирование, осуществляемое в ответ на генерируемые сигналы от устройств 30 для измерения наклона, и в примере, показанном на фиг.1, это регулирование одного из таких параметров, как скорость нагнетания насоса, осуществляющего дополнительное закачивание, и вязкость дополнительно закачиваемой жидкости для гидравлического разрыва. Когда регулируют вязкость, это можно осуществлять путем изменения либо одного из таких параметров, как вязкость жидкой фазы (например, геля основы) жидкости для гидравлического разрыва пласта и концентрация фазы крупных частиц (например, расклинивающего наполнителя) в жидкости для гидравлического разрыва пласта, либо обоих этих параметров. Такие изменения может проводить контроллер 24 или оператор, регулирующий один из таких параметров, как скорость нагнетания насосами насосной подсистемы 22, притоки материалов в смеситель подсистемы 18 подготовки жидкости и скорость транспортировки расклинивающего наполнителя из подсистемы 20 подготовки расклинивающего наполнителя.
В целях упрощения дальнейшего описания оно будет проведено применительно к ширине разрыва пласта как размеру, определяемому на основании сигналов устройств 30 для измерения наклона. Зная ширину, можно сопоставить ее с моделью, созданной для соответствующей скважины. Такую модель строят обычным способом на стадии разработки жидкости, когда специалист в данной области техники разрабатывает жидкость для гидравлического разрыва с целью ее использования при обработке, проводимой в конкретной скважине. Хотя конкретная зависимость между шириной разрыва пласта и временем закачивания или объемом закачиваемой жидкости может изменяться от скважины к скважине, обобщенная зависимость проиллюстрирована кривой или линией 40 графика на фиг.4. Если действительная ширина, определенная на основании сигналов устройств для измерения наклона и вышеупомянутой моделируемой зависимости, выходит за пределы предварительно выбранной допустимой вариации 42 моделируемой кривой 40 ширины (например, той, которую определяют с помощью контроллера 24 и/или соответствующих наблюдений человека-оператора), можно провести коррекцию. Вариация 42 может быть нулевой либо она может быть как больше, так и меньше (на одну и ту же или разные величины), чем требуемая величина, обуславливаемая зависимостью, представленной на фиг.4, либо она может быть только больше или только меньше, чем требуемая величина (то есть возможна некоторая допустимая вариация в одном направлении, но с нулевым допуском в другом направлении относительно линии 40 графика). Если выбирают некоторую вариацию, которая может быть как больше, так и меньше, чем требуемый рост ширины разрыва, представленный зависимостью в форме линии 40 графика (такая вариация обозначена позицией 42), то измеренная ширина, отображенная на графике точкой 44, не должна вызывать проведение корректирующего регулирующего воздействия, потому что эта измеренная ширина находится в пределах допустимого диапазона. Слишком большая измеренная ширина, отображенная точкой 46 на фиг.4, или слишком малая измеренная ширина, отображенная точкой 48 на фиг.4, должна вызывать корректирующее воздействие. Таким образом, соответствующее этой иллюстрации регулирование в ответ на генерируемые сигналы предусматривает сравнение измеренной величины, по меньшей мере, одного размера разрыва, отображаемой генерируемыми сигналами, с предварительно смоделированной величиной того же самого, по меньшей мере, одного размера.
Ниже приведены иллюстративные примеры выявляемых проблем и корректирующих воздействий, не носящие ограничительный характер.
В случае, если измеряемая ширина разрыва пласта увеличивается со скоростью, значительно большей, чем она должна быть в соответствии с моделью (например, такова, как показанная в точке 46, отображающей данные измерения, на фиг.4), и одновременно происходит быстрое увеличение давления обработки в забое, обнаруживаемое, например, датчиком 28 давления и надлежащим образом передаваемое в контроллер 24, то специалист (или сам контроллер 24, если он запрограммирован надлежащим образом) сможет узнать, что в разрыве образовалась перемычка, вероятно, возникшая потому, что расклинивающий наполнитель наталкивается на препятствие. При этом можно принять одну или несколько следующих мер коррекции: увеличить скорость впрыска, увеличить вязкость жидкости, изменить концентрацию расклинивающего наполнителя. Эти варианты выбора возникают потому, что гидравлическая ширина разрыва пласта является функцией скорости впрыска (течения суспензии), длины разрыва, вязкости жидкости для гидравлического разрыва и модуля Юнга породы пласта в точке впрыска. Одна из форм моделирования ширины представлена уравнением:
Ширина=0,15[(скорость течения суспензии)(вязкость суспензии)(длина разрыва)/модуль Юнга]0,25.
Это уравнение известно как уравнение ширины Перкинса (Perkins) и Керна (Kern). Есть и другие уравнения, например, вытекающие из теории Геерсма (Geersma) и Де Клерка (DeKlerk), которые также связывают гидравлическую ширину со скоростью впрыска, вязкостью жидкости для гидравлического разрыва и геометрией разрыва.
Если приходится предпринимать корректирующее воздействие, то оператор может сделать выбор в пользу регулирования любого из таких параметров, как скорость течения и вязкость, или их обоих, как указывает зависимость, приведенная выше. Скорость течения суспензии регулируют путем регулирования скорости нагнетания насосами насосной подсистемы 22. Коэффициент вязкости регулируют путем изменения любого из таких параметров, как вязкость жидкости или концентрация расклинивающего наполнителя в суспензии, или обоих этих параметров, как пояснялось выше. Скорость является первоочередным фактором, которым следует воспользоваться при корректирующем воздействии, если необходима быстрота коррекции, поскольку изменение в скорости течения жидкости или суспензии разрыва, осуществляемое контроллером 24 или оператором, регулирующим насосы насосной подсистемы 22, вызывает немедленный эффект внутри скважины. С другой стороны, изменения вязкости не сказываются внутри скважины до тех пор, пока не произойдет перемещение существующего объема суспензии между некоторым местоположением внутри скважины и точкой на поверхности, в которой и выявляется изменение вязкости.
В связи с изменением вязкости жидкости (то есть изменением вязкости геля основы или иной жидкой фазы жидкости или суспензии для гидравлического разрыва) нужно отметить, что это изменение при наличии конфигураций оборудования, предусматривающих непрерывное (динамическое) перемешивание жидкости, сказывается быстрее, чем при наличии конфигураций оборудования, предусматривающих перемешивание партиями, потому что при конфигурации оборудования, предусматривающей непрерывное перемешивание, не нужно использовать или повторно перемешивать большой объем предварительно смешанной жидкости.
На коэффициент вязкости в вышеупомянутом уравнении ширины также может влиять изменение количества фазы крупных частиц в жидкости для гидравлического разрыва, вследствие чего изменяется концентрация крупных частиц (например, расклинивающего наполнителя) в этой жидкости. В случае ньютоновской жидкости размеры крупных частиц и вязкость связаны зависимостью, описанной в статье «Влияние свойств частиц на реологию концентрированных неколлоидных суспензий», авторы Цай, Боттс и Плуфф, в журнале «Реология» ("Effects of particle properties on the rheology of concentrated non-colloidal suspensions," Tsai, Botts and Plouff, J. Rheol.) 36(7) (октябрь 1992 г.), которая упоминается в данном описании для справок и в которой приведена нижеследующая зависимость:
Вязкость(относительная) = [1-(объемная доля частиц/ максимальный коэффициент упаковки частиц)]-X,
где Х = (собственная относительная вязкость суспензии)·(максимальный коэффициент упаковки частиц).
Для неньютоновских жидкостей в работе «Новый способ прогнозирования давления трения и реологии жидкостей для гидравлического разрыва, нагруженных расклинивающими наполнителями», авторы Кек, Нехмер и Струмло, научный отчет Общества инженеров-нефтяников (ОИН) ("A New Method for Predicting Friction Pressure and Rheology of Proppant-Laden Fracturing Fluids," Keck, Nehmer and Strumlo, Society of Petroleum Engineers (SPE) paper № 19771 (1989)), упоминаемой в данном описании для справок, указана следующая зависимость между вязкостью и компонентом, содержащим крупные частицы:
Вязкость (относительная) =
{1+[0,75(e1,5n'-1)(e-(1-n')(сдвиг)/1000)][1,25Ф/(1-1,5Ф)]}2,
где n' - степенной показатель течения ненагруженной жидкости, Ф - объемная доля частиц суспензии и «сдвиг» обозначает скорость сдвига ненагруженной ньютоновской жидкости.
Еще один пример реагирования на скважинную информацию имеет место, когда действительная ширина, обнаруживаемая устройствами 30 для измерения наклона, показывает, что эта ширина значительно меньше, чем та, которая моделировалась для момента закачивания или некоторой точки в закачиваемом объеме в процессе формирования гидравлического разрыва (такой, как точка 48, отображающая данные измерения, на фиг.4). Слишком малая ширина может свидетельствовать о неуправляемом росте высоты разрыва пласта. В таком случае находящаяся под давлением жидкость для гидравлического разрыва пласта вызывает быстрое вертикальное скольжение при малом увеличении ширины. Это может создать ситуацию обрушения, если при нежелательно высоком разрыве пласта возникнет сообщение соседнего по вертикали пласта или зоны, например, содержащей воду, с продуктивной зоной, в которой и нужен разрыв. Если бы получаемые в реальном масштабе времени данные свидетельствовали о том, что ситуация развивается именно таким образом, оператор (или должным образом запрограммированный контроллер 24) мог бы среагировать, немедленно остановив закачивание в насосной подсистеме 22 и тем самым уменьшив коэффициент скорости течения в вышеупомянутом уравнении до нуля.
Вышеупомянутые примеры регулирования посредством корректирующих воздействий могут быть реализованы вручную оператором или автоматически с помощью средства управления (например, программируемого контроллера 24, реагирующего на сигналы, регулируя одно или более автоматически задаваемых обнаруживаемых состояний подсистем).
Таким образом, настоящее изобретение, а также его аспекты, описанные здесь, обеспечивают решение поставленных задач и достижение поставленных целей и вышеупомянутых преимуществ. Хотя в целях раскрытия сущности изобретения были описаны предпочтительные конкретные варианты осуществления, специалисты в данной области техники могут внести в конструкцию и компоновку составных частей и в осуществление предпринимаемых мер изменения, которые находятся в рамках объема притязаний этого изобретения, определяемого прилагаемой формулой изобретения.
Изобретение относится в основном к способам формирования гидравлического разрыва пласта, сообщающегося со скважиной, такого как углеводородный пласт, пересекаемый нефтедобывающей или газодобывающей скважиной. Обеспечивает повышение эффективности способа. Сущность изобретения: в скважине размещают датчики для генерирования сигналов, относящихся к деформации пласта на участке его разрыва. Закачивают жидкость для гидравлического разрыва в скважину для инициирования или расширения разрыва в пласте, с которым эта скважина сообщается. В течение периода времени проведения работы по формированию гидравлического разрыва генерируют сигналы в ответ на определение, по меньшей мере, одного размера разрыва. В течение периода времени проведения работы по формированию гидравлического разрыва с обработкой сигналов в реальном масштабе времени дополнительно закачивают жидкость для гидравлического разрыва в скважину в ответ на генерируемые сигналы. При этом осуществляют в ответ на генерируемые сигналы регулирование, по меньшей мере, одного из таких параметров, как скорость нагнетания насоса при дополнительном закачивании и вязкость дополнительно закачиваемой жидкости для гидравлического разрыва. 7 з.п. ф-лы, 4 ил.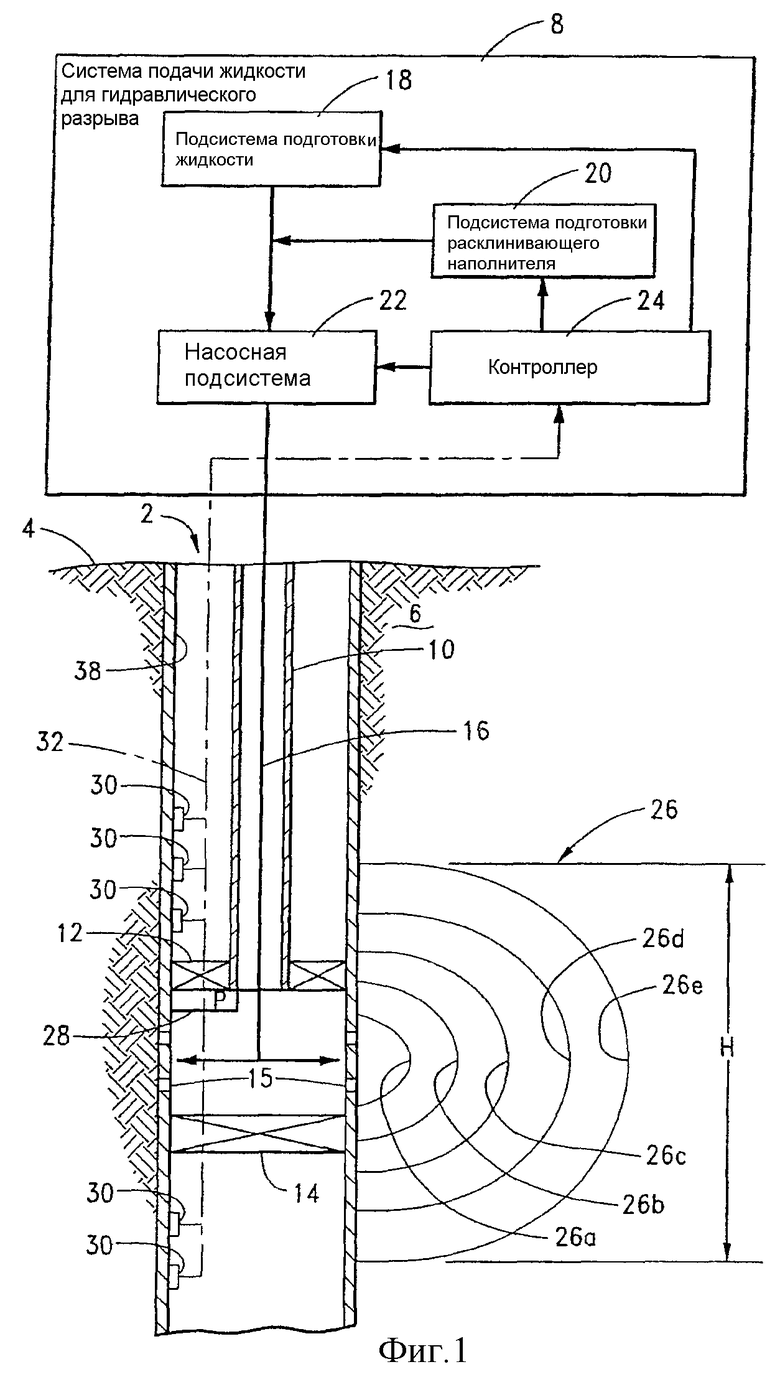
| SU 754347 A, 10.08.1980.SU 766188 A, 10.05.1999.SU 1535992 A1, 15.01.1990.SU 918918 A, 07.04.1982.SU 1298376 A1, 23.03.1987.US 3630284 A, 28.12.1971.ИТЕНБЕРГ С.С., Промысловая геофизика, Гостоптехиздат, 1961, с | |||
| Аппарат для радиометрической съемки | 1922 |
|
SU124A1 |

