Изобретение относится к области метеорологии, а именно к средствам активного воздействия специальными противоградовыми изделиями, далее по тексту ПГИ, на различные виды облаков с целью создания необходимых условий как при ведении сельскохозяйственных работ, так и в повседневной жизни населения для защиты от градобитий, регулирования интенсивности выпадения дождей и вызывания их в засушливые периоды, ослабления паводков и селей ливневого происхождения.
Известна ракетная установка ТКБ-040 для запуска противоградовых ракет калибром 82,5 мм с реактивным стартом, состоящая из металлического основания с опорными лапами, вертлюка, двух этажерок с закрепленными на них попарно и веерообразно (влево - вправо под углом 5° относительно нулевого отсчета по азимуту) 12-ти направляющих для ракет и выносного ручного пульта их запуска [1].
Недостатками этой установки являются:
- ручное наведение на цель,
- низкие точность наведения, оперативность засева облаков и скорострельность,
- высокая стоимость.
Наиболее близкой по своей технической сути к предложенному комплексу является ракетная установка "Алан-МЗ" для запуска противоградовых ракет калибром 59 мм с динамическим стартом и с дистанционным полуавтоматческом управлением, состоящая из залитого в грунте стационарного фундамента металлического основания, погона шарикового, верхнего станка, люльки, редукторов подъема и поворота ложементов с закрепленными на них 36-ю напраляющими трубами для ракет, комплекта электрорадиооборудования, источника питания 24в и выноской ЭВМ, выбранной в качестве прототипа [2].
Однако и эта установка имеет недостатки:
- только один режим управления и только одной ракетной установкой,
- сложность конструкции и технологии изготовления,
- наличие стационарного фундамента,
- высокие металлоемкость и трудоемкость,
- очень высокая рыночная стоимость.
Необходимо отметить, что все существующие аналоги предложенного комплекса, включая и описанные выше, предназначены только для использования ПГИ одного конкретного калибра и типа, что создает службам, их применяющим, определенные трудности при обеспечении боеприпасами, а создание более совершенных ПГИ других калибров и типов повлечет за собой необходимость полного технического перевооружения этих служб за счет приобретения новых установок, что потребует больших капитальных затрат.
Цель изобретения - создание комплекса для запуска ПГИ, обладающего следующими преимуществами перед известными аналогами:
- применение унифицированных по габаритам и способу крепления сменных пакетов направляющих для ПГИ различных калибров и типов,
- обеспечение высокой точности наведения и оперативности в работе,
- создание пульта дистанционного управления для комплекса по запуску ПГИ, самостоятельно производящего обработку аварийных сигналов об отказе любого из элементов его схемы, обеспечивающего выработку сигналов, блокирующих аварии из-за этих отказов, и оповещающего оператора путем передачи этих ситуаций на пульт дистанционного управления,
- создание переносного фундамента ракетной установки, обеспечивающего полную взаимозаменяемость крепления на нем любой из ракетных установок комплекса,
- резкое упрощение конструкции и технологичности комплекса, обеспечивающее значительное снижение стоимости применяемых материалов, комплектующих изделий и трудоемкости изготовления, что в свою очередь существенно уменьшит рыночную стоимость комплекса и позволит повысить его надежность и долговечность в эксплуатации,
Поставленная цель достигается тем, что пусковая установка выполнена универсальной со сменными пакетами многоярусных направляющих для ПГИ различных калибров и типов, а сами пакеты унифицированы по габаритам, креплению к платформе для их размещения и стопорными устройствами для ПГИ, удерживающих их в пусковой установке до начала старта; каждый сменный многоярусный пакет направляющих выполнен для конкретного калибра и типа ПГИ как реактивного, так и динамического их старта, соединенных между собой, из одинаковых блоков направляющих, с их количеством в пакетах, кратным 4, 5, 6 и 7, и с такой же кратностью размещаемых в них ПГИ, характеризуется следующими зависимостями: отношением длины "L" направляющих к длинам ПГИ равным 3:1; к наружному диаметру ракет или снарядов, равным 1,59:1; отношением горизонтального межцентрового расстояния между ПГИ "Б" в направляющем их блоке к их наружным диаметрам, равным 2,1:1,85, а вертикального их межцентрового расстояния "В" также к наружным диаметрам ракет, равным 2,4:2,15; отношением таких же расстояний для снарядов к их длинам и наружным диаметрам, соответственно равным 1,85:1,58 и 2,02:1,78; основой его блоков направляющих являются три штампосварные перегородки корытообразной формы, выполненные из горячекатанной листовой стали, толщиной 3 мм, боковые из которых расположены на одинаковых расстояниях от краев по длине соединяемых ими направляющих, а средняя - в их центре, и при этом отношение межцентрового расстояния между перегородками "А" к расстояниям "а" крайних из них от краев по длине направляющих равно 28:1, сами же перегородки для всех блоков имеют равные длины и высоты, а их ширины "h" так относятся к высоте "Н" при краткости расположения в них направляющих, равной 4, 5, 6 или 7, как 0,25:0,2;0,16;0,14; в самих же перегородках симметрично расположены Ж-образные окна, через которые проходят попарно зигзаговидными основаниями навстречу друг к другу направляющие W-образного сечения, выполненные из горячекатанной стали, толщиной 1,5-2 мм, между которыми устанавливаются ПГИ, и при этом углы в основаниях направляющих равны 90°, у их левых и правых сторон к их же вертикальным осям -45°, а у ребер жесткости, отогнутых вовнутрь этих сторон к их же плоскостям, - 90°÷135°; у всех его сменных пакетов нижние из пар направляющих оснащены стопорными устройствами, рабочая головка фиксатора каждого из них при вводе ПГИ в направляющие утапливается в корпусе этого устройства, фиксируясь в байонетном пазе с помощью специальной гайки и ключа-рычага, сама же головка фиксатора выполнена в форме правильного параллелепипеда, усеченного плоскостью, проходящей через углы больших его боковых сторон у их нижних оснований с наклоном к ним, равным 30°, точно соответствующего наклону стопорного паза ПГИ, что в совокупности со строго регламентируемым усилием сжатия пружины стопорного устройства, равным 60±10 кгс, обеспечивает запрограммированный старт всех ПГИ; для обеспечения высокой точности вращения, т.е. угла поворота по азимуту, и надежного стопорения его пусковой установки до момента пуска и после него поворотное устройство в свою очередь оснащено карусельным устройством, стальной диск которого выполнен в виде равнобедренного усеченного конуса, расположенного своим большим основанием к низу установки и опирающегося на шесть шарикоподшипниковых опор, симметричных относительно друг к другу под углом 60°, между которыми также симметрично, под углом 30°, к опорам, на верхнюю плоскость этого диска опираются шесть шарикоподшипниковых замков, и, кроме того, к периферии конусной поверхности карусельного диска, под углом 120° друг к другу с привязкой к любой из опор или к любому замку под углом 15° плотно прилегают три стальных ориентатора такой же конструкции, как и у диска, но перевернутой к нему на 180°; кроме того, поворотное устройство оснащено тормозом, рабочая поверхность которого покрыта фрикционным материалом, например асбестовой лентой типа Б, и контактируя в процессе торможения с верхней торцовой поверхностью диска карусельного устройства прекращает его вращение; фундамент комплекса выполнен в виде свободно лежащей на выравненном горизонтальном фунте железобетонной плиты, которую при необходимости можно перемещать обычными транспортными средствами на любое выбранное для стрельб место, и оснащен четырьмя одинаковыми самоустанавливающимися анкерными устройствами, основная деталь которых имеет форму в виде пустотелой стальной трубы прямоугольного сечения, выполненной, например, в виде состояния поставки, либо сварной из гнутой листовой заготовки, двух уголков или швеллеров соответствующих размеров полками навстречу друг другу, высота которой равна толщине фундаментной плиты, а сама труба крепится к ее арматуре и совместно заливается бетоном вместе с ее двумя одинаковыми стальными цилиндрическими закладными стержнями, приваренными к этой трубе в двух уровнях и взаимно перпендикулярных друг к другу так, что расстояние между их горизонтальными осями по вертикальной оси симметрии закладной трубы, равно половине длины этой трубы, а все их части, выступающие наружу стенок этой трубы равны между собой, на верхнем же закладном стержне внутри трубы установлен подвижный анкерный болт, головка которого имеет овальный паз шириной, равной диаметру этого стержня, по которому он может перемещаться в двух взаимно перпендикулярных направлениях, по одному из которых в каждую сторону на величину, равную 1/4, а по другому также в каждую сторону на 5/4 диаметра этого стержня, что обеспечивает полную взаимозаменяемость монтируемых на фундаментные плиты пусковых установок независимо от неточности изготовления на них анкерных отверстий и неточностей при установке и заливке в фундаментные плиты самих самоустанавливающихся анкерных устройств; тормозное устройство комплекса для фиксации по углу возвышения перед стартом ПГИ выполнено из тормозного сектора, оснащенного на рабочей поверхности целым рядом одинаковых правильных усеченных четырехгранных тормозных пирамид, тормозной колодки с накладкой из упругого материала, например вакуумной резины, и рычага, приводимого в движение соленоидом, и при этом расчетами основных частей тормозного устройства определены следующие зависимости размеров его конструктивных элементов:
- длина зоны перемещения тормозного сектора так относится к длине его рабочей части, как 2:3,
- отношение длины большего плеча рычага к его меньшему плечу как 1,625:1,
- длина рабочей части тормозного сектора так относится к длине рабочей части колодки, как 3:1,
- длина рабочей части тормозной колодки так относится к ее ширине, как 3,5:1,
- ширина рабочей части тормозной колодки так относится к ширине или длине основания любой тормозной пирамиды, как 6:1, а отношение ширины или длины основания тормозной пирамиды к ее высоте равно 1:1; для обеспечения работы комплекса в автоматическом, полуавтоматическом и ручном режимах, удобства обслуживания, высокой надежности и безаварийности в процессе эксплуатации электронные блоки контроля и управления устройствами и механизмами его пусковой установки разделены на три яруса таким образом, что при возникновении в каком-либо из них аварийной ситуации в нем осуществляется ее обработка и блокировка с передачей информации на пульт дистанционного управления этой установки, кабели же, соединяющие первый и второй ярусы, являются неотъемлемой частью сменного пакета направляющих, для предотвращения провиса при работе, проведен через точку оси вращения этого пакета, а для соединения второго и третьего ярусов проведен сквозь полый вал механизма поворота пусковой установки по углам азимута и, в то же время, все сигналы связи между ярусами и пультом дистанционного управления осуществляются двунаправленными токовыми петлями; сектор датчика комплекса оснащен отверстиями, через которые оптопары считывают сигналы поворота установки запуска ПГИ по углам возвышения и точку их отсчета, имеет отношение угла своей поверхности с отверстиями к углу расположения в нем точки отсчета, равное 1,611:1, в диске же это отношение равно 8:1; количество дуг, на которых выполнены эти отверстия, равно четырем и в том числе одна с отверстием точки отсчета; отношение размеров наружного радиуса сектора к радиусам его дуг, на которых выполнены отверстия, друг к другу, равно 1:1,027:1,035:1,037:1,038, а смещение отверстий на дугах, по которым считываются сигналы поворота, относительно друг друга равно 30', что соответствует точности наведения установки по углам возвышения и по азимуту, смещение же этих отверстий на каждой из дуг, кроме дуг с отверстием точки отсчета, относительно друг друга равно 1°30'; у диска все отношения привязки, кроме точки отсчета, такие же как и у сектора.
Предложенное изобретение иллюстрируется фигурами 1-16.
На фиг.1-1a схематически изображен комплекс воздействия на облака, состоящий из пусковой установки 1 в составе станины 2, поворотного устройства 3, платформы 4 для размещения сменных пакетов блоков направляющих ПГИ 5, привода наведения по возвышению 6, привода наведения по азимуту 6а, пульта дистанционного управления 7 и приемопередающего устройства 8, составными частями которого являются радиомодем и радиостанция (на фиг. не показаны); центра управления пусковыми установками 9 в составе локатора 10, телемеханического устройства 11, промышленного компьютера 12 и приемопередающего устройства 8.
Работа комплекса осуществляется следующим образом: при автоматическом режиме управления локатор 10, обнаружив облака передает информацию о них телемеханическому устройству 11, а оно, в свою очередь передает эту информацию промышленному компьютеру 12, который, обработав ее в соответствии с заложенными в нем программами, передает команды радиопередающим устройствам 8, с которых они попадают на пульты дистанционного управления 7, пусковой установки наведения, а затем и в приводы 6 и 6а, после чего и осуществляется запуск ПГИ по соответствующим азимутам и углам возвышения;
- при полуавтоматическом режиме работы, который осуществляется голосовой связью по телефону при очень высоких радиопомехах в период грозовых воздействий или выходе из строя радиопередающего устройства 8, данные компьютера 12 набираются оператором пусковой установки 1 на пульте дистанционного управления 7, в соответствии с которыми установки 1 приводится в действие;
- в случаях выхода из строя (на фиг. не показан) двигателя одного из приводов наведения 6 или 6а, поворотного устройства 3 оператор установки наводит ее вручную, по переданным по телефону голосовым сигналам из центра управления 9 ее оператором и производит пуск ПГИ.
Необходимо отметить, что центр управления 9 предложенного комплекса обеспечивает одновременное управление десятков пусковых установок, расположенных от него в радиусе до 140 км, и на него выдан патент РФ №2083999.
На фиг.2, для примера, обведенный штрихпунктирной линией схематически изображен сменный пакет направляющих 13, многоярусность блоков 14 (один из них условно обведен пунктирной линией), количество ПГИ (на фиг. не показаны), устанавливаемых в каждом из этих блоков 14, равно 4, 5, 6 или 7. Блок 14 состоит из 3-х перегородок 15, в каждой из которых симметрично выполнены Ж-образные окна 16 (на фиг. условно изображены окружностями), а их количество зависит от принятой кратности блоков 14 в сменном пакете 13. Перегородки 15 соединены между собой проходящими сквозь окна 16 парами W-образных направляющих 17, и при этом межцентровые расстояния "А" между перегородками 15 для всего набора сменных пакетов 13 одинаковы, а расстояния между осями пар направляющих "Б" и горизонтальными осями симметрии перегородок "В" зависят от кратности блоков 14, входящих в пакет 33, и соответственно, от количества пар направляющих 17. При сборке блоков 14 в пакет 13 между ними устанавливаются прокладки 18.
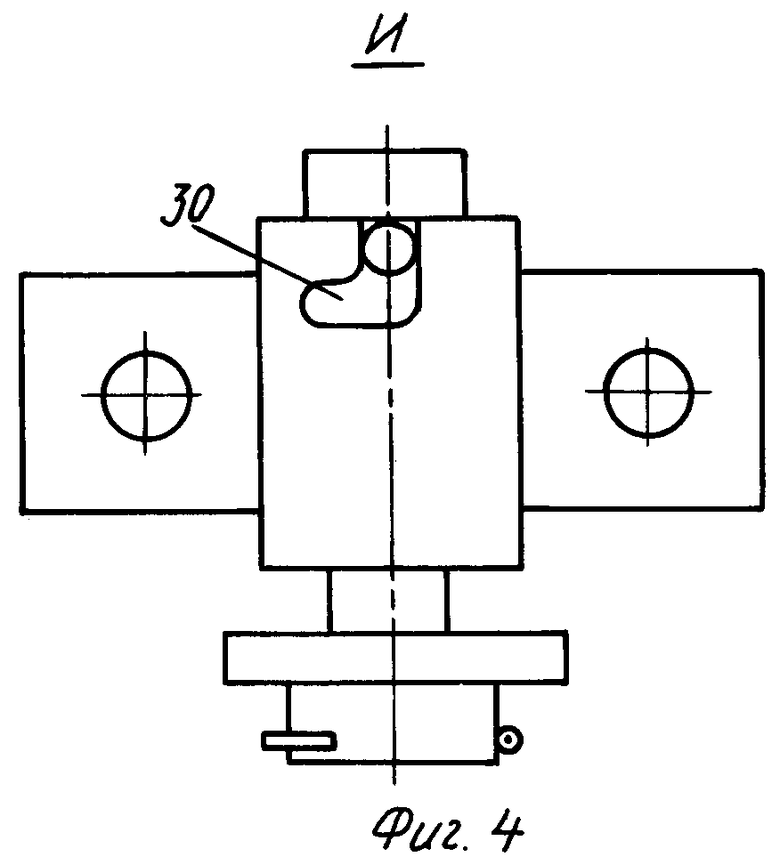
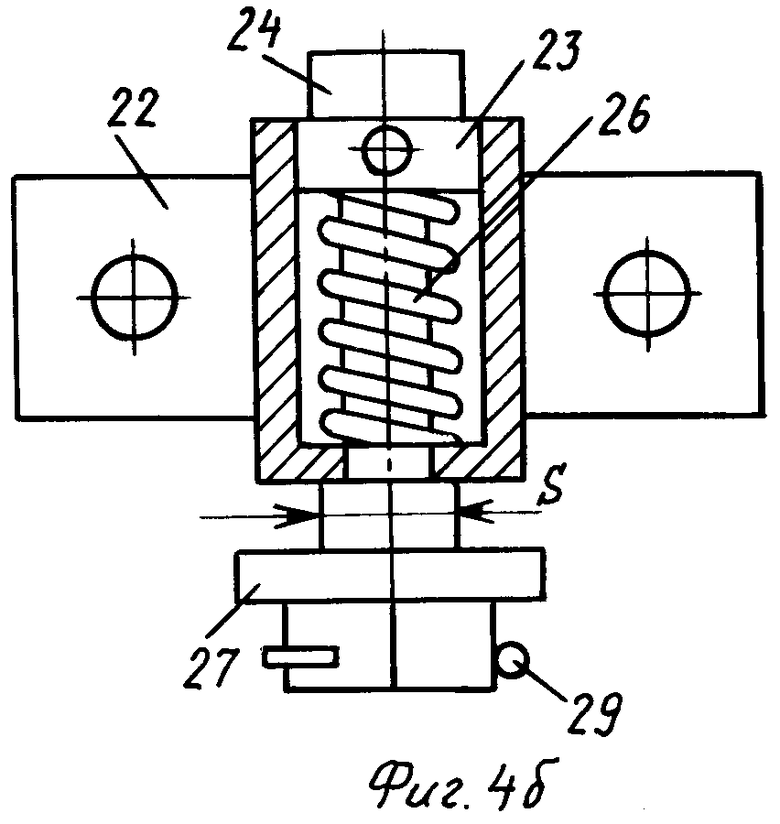
На фиг.3 изображен блок направляющих 14, на котором видны их ребра жесткости 19. На фиг.3а - разрез E-Е на фиг.3. В местах пересечения их с перегородками 15, в ребрах жесткости 19 выполняются соответствующие прорези (на фиг. не показаны), и при сборке в этих местах ребра жесткости 19 свариваются с перегородками 15. На этой же фигуре условно изображено стопорное устройство 20, которым оснащается каждая пара направляющих 17. Блок направляющих 14 участвует в работе пусковой установки 1 следующим образом: ПГИ (на фиг. не показаны) вставляются в каждое из его окон 16 со стороны стопорных устройств 20 до их стопорения последними. После осуществления старта ПГИ (на фиг. не показаны) по заданной программе покидают свои направляющие 17 и летят в заданном направлении. На фиг.4, 4а, 4б изображено стопорное устройство 20 (фиг.3), состоящее из следующих деталей и сборочных единиц: корпуса 21 с крепежными лапками 22, фиксатора 23 с рабочей головкой 24, штифтом 25 и байонетным пазом 30, пружины 26, спецгайки 27 с лысками под зев "S" ключа-рычага (на фиг. не показан) и гайки 28 со шплинтом 29.
Работа стопорного устройства происходит следующим образом: перед установкой ПГИ (на фиг. не показаны) ключом-рычагом (на фиг. не показан), надетым на лыски под зев "S" спецгайки 27, и опираясь о дно корпуса 21, сжимаем пружину 26 до тех пор, пока штифт 25 не дойдет до нижнего участка байонетного паза 30, а верх рабочей головки 24 фиксатора 23 установится заподлицо с верхней плоскостью корпуса 21. После установки ПГИ все описанные действия, начиная с установки ключа-рычага, производятся в обратном порядке и рабочая головка 24 совмещается с соответствующим пазом на корпусе ПГИ. После включения систем зажигания у ПГИ они наращивают тяговое усилие и, преодолевая усилие пружин 26, скользят по скосу рабочих головок 24, утапливая их в корпусах 21 стопорных устройств 20, и обеспечивают стрельбу комплекса 1.
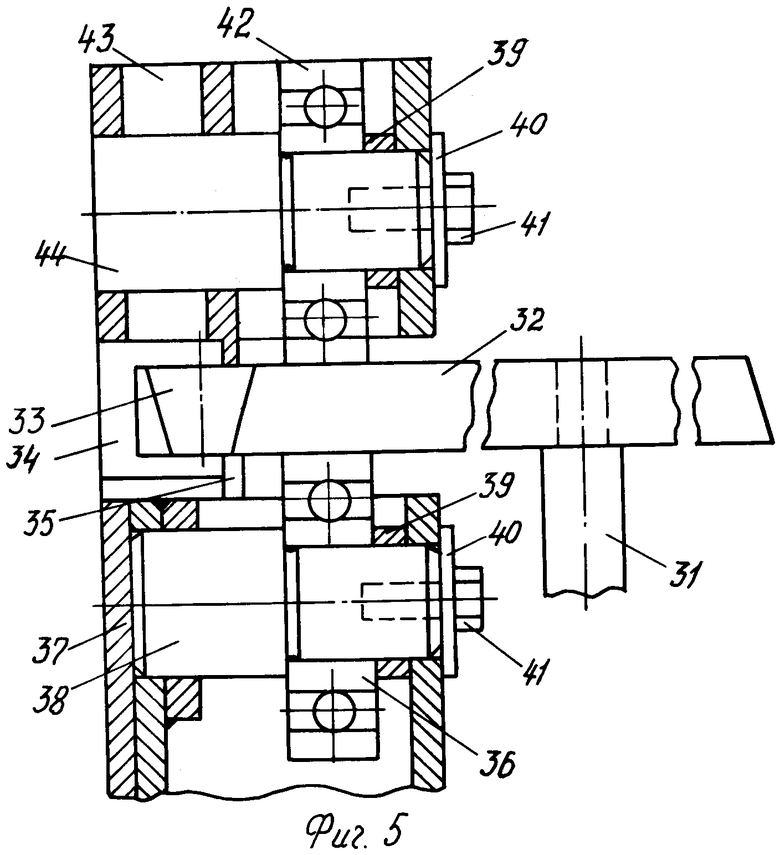
На фиг.5 изображено карусельное устройство, обеспечивающее высокую точность работы поворотного устройства 3 вокруг вертикальной оси пусковой установки 1 (см. фиг.1), и при этом, условно, основные сборочные единицы этого устройства изображены в одной плоскости. Карусельное устройство, показанное на фиг.5, состоит из следующих деталей и сборочных единиц: вала 31 с карусельным диском 32, имеющим форму правильного усеченного конуса, трех ориентаторов 33 такой же формы с кронштейнами их крепления 34, соединенных со станиной пусковой установки 1 (см. фиг.1), тормоза 35, шести шарикоподшипниковых опор 36 с кронштейнами их крепления 37, осями 38, распорными втулками 39, шайбами 40 и болтами 41, а также с шестью шарикоподшипниковыми замками 42 с кронштейнами их крепления 43, осями 44, распорными втулками 39, шайбами 40 и болтами 41.
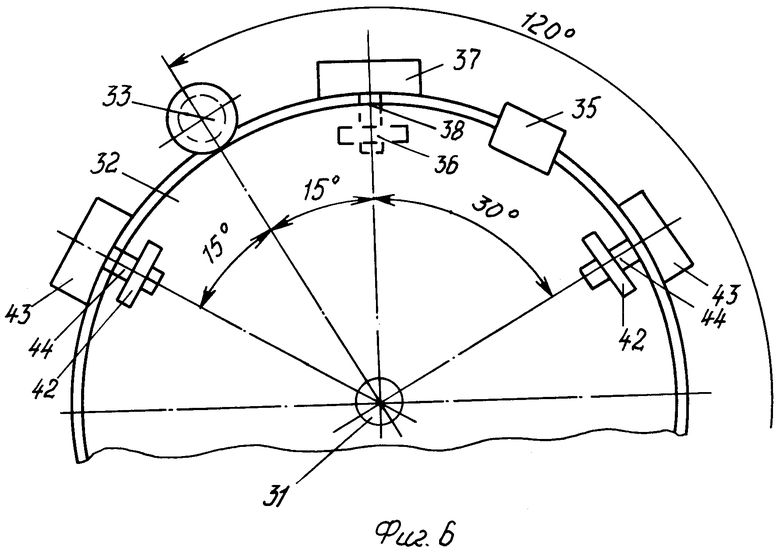
Изображенное на фиг.5 карусельное устройство работает следующим образом: вал 31 с диском 32 вращаются соответствующим редуктором (на фиг. не показан), опираясь при этом на шесть шарикоподшипниковых опор 36, прижимаясь к ним шестью шарикоподшипниковыми замками 42, при этом опоры 36 и замки 42, смещены друг относительно друга на 30°, что исключает торцовое биение диска 32, а его радиальное биение при вращении ликвидируют три ориентатора 33, расположенные друг относительно друга под углом 120° и симметрично к рядом установленным опорам 36 и замкам 42 (см. фиг.6) Для обеспечения точного положения диска 32 в момент старта ПГИ срабатывает тормоз 35, который прижимает свою тормозную колодку (на фиг. не показана) к верхней торцовой поверхности диска 32 и останавливает его.
На фиг.6 схематично показан вид сверху на диск 32 карусельной установки примыкающего к нему одного из трех ориентаторов 33 с тормозом 35, одной из шести шарикоподшипниковой опорой 36 и двух, также из шести шарикоподшипниковых замков 42 и расположенных друг относительно друга перечисленных сборочных единиц, выраженных углами 15 и 30°. Работа карусельного устройства приведена при описании фиг.5.
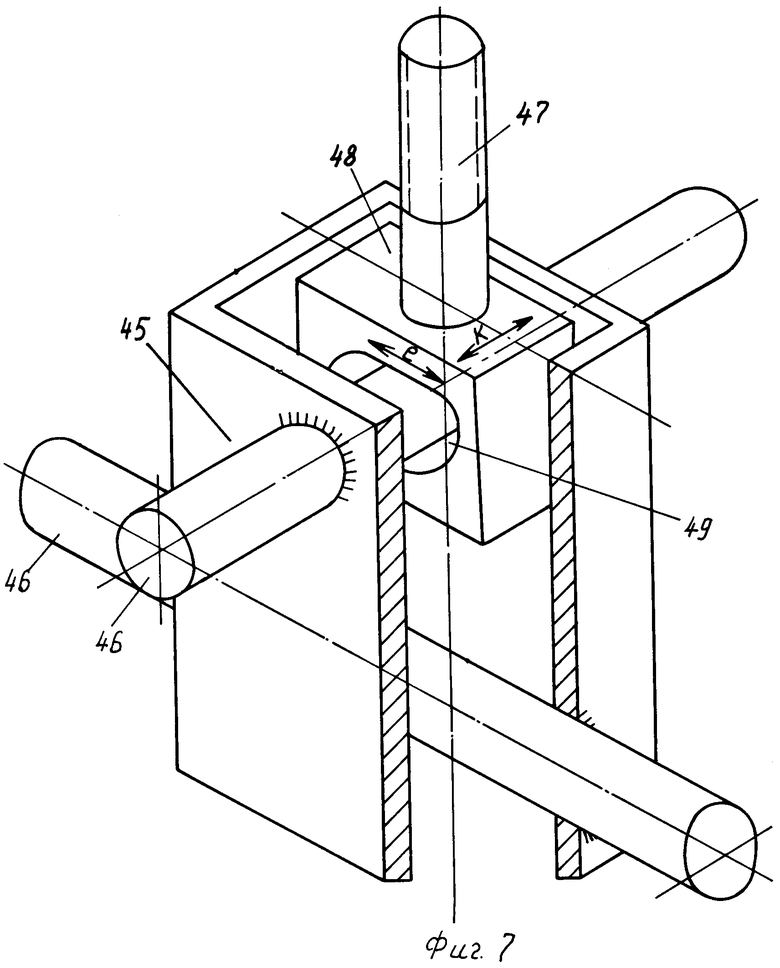
На фиг.7 схематично, в изометрии, изображено самоустанавливающее анкерное устройство с вырезом части закладной трубы 45, на котором наглядно показаны все его детали, а именно: закладная стальная труба 45, которая, например, может быть выполнена прямоугольного сечения в условиях поставки, либо сварной из гнутой листовой заготовки, двух уголков или швеллеров соответствующих размеров полками навстречу друг другу, с двумя закладными цилиндрическими стальными же одинаковыми стержнями 46, приваренными к закладной трубе 45 и расположенными в ней в двух уровнях взаимно перпендикулярно друг к другу так, что расстояние между их горизонтальными осями по вертикальной оси симметрии закладной трубы 45 равно половине длины этой трубы, а все их части, выступающие наружу стенок трубы 45, равны между собой. На верхнем закладном стержне 46 внутри трубы установлен подвижной анкерный болт 47, в головке 48 которого выполнен овальный паз 49, обеспечивающий болту 47 перемещение "е" относительно вертикальной оси симметрии закладной трубы 45 на величину в каждую сторону, равную 1/4 диаметра закладного стержня 46, и перемещения "к" также в каждую из сторон на величину, равную 5/4 диаметра этого же стержня.
Изготовление и работа самоустанавливающего анкерного устройства, изображенного на фиг.7, осуществляется следующим образом: руководствуясь величиной максимального опрокидывающего момента, воздействующего на ракетную установку во время запуска ПГИ, рассчитывают размеры железобетонной фундаментной плиты (на фиг. не показана), и соответственно, размеры всех деталей и элементов самоустанавливающего анкерного устройства исходя из этих запасов прочности и руководствуясь тем, что длина (высота) закладной трубы 45 должна быть равной толщине фундаментной плиты.
После изготовления закладной трубы 45 расчетной длины на ней сверлятся отверстия для закладных стержней 46, диаметры и длины которых исполняются также в соответствии с расчетами, после чего они вставляются в отверстия закладной трубы 45, а на верхней из них при этом надевается головка 48 анкерного болта 47. Выходящие концы закладных стержней 46 уравниваются и привариваются к закладной трубе 45.
Затем к арматуре фундаментной плиты привариваются согласно чертежу четыре анкерные устройства, плита заливается бетоном и при этом верхние торцы этих устройств должны быть залиты строго "заподлицо" с верхней плоскостью фундаментной плиты, которая устанавливается на отнивелированное основание на месте эксплуатации пусковой установки или на соответствующем транспортном устройстве.
Таким образом самоустанавливающиеся анкерные устройства обеспечивают полную взаимозаменяемость монтируемых на фундаментные плиты пусковых установок, компенсируя при этом погрешности при изготовлении межцентровых расстояний анкерных отверстий в пусковых установках и установки анкерных болтов и фундаментальных плитах.
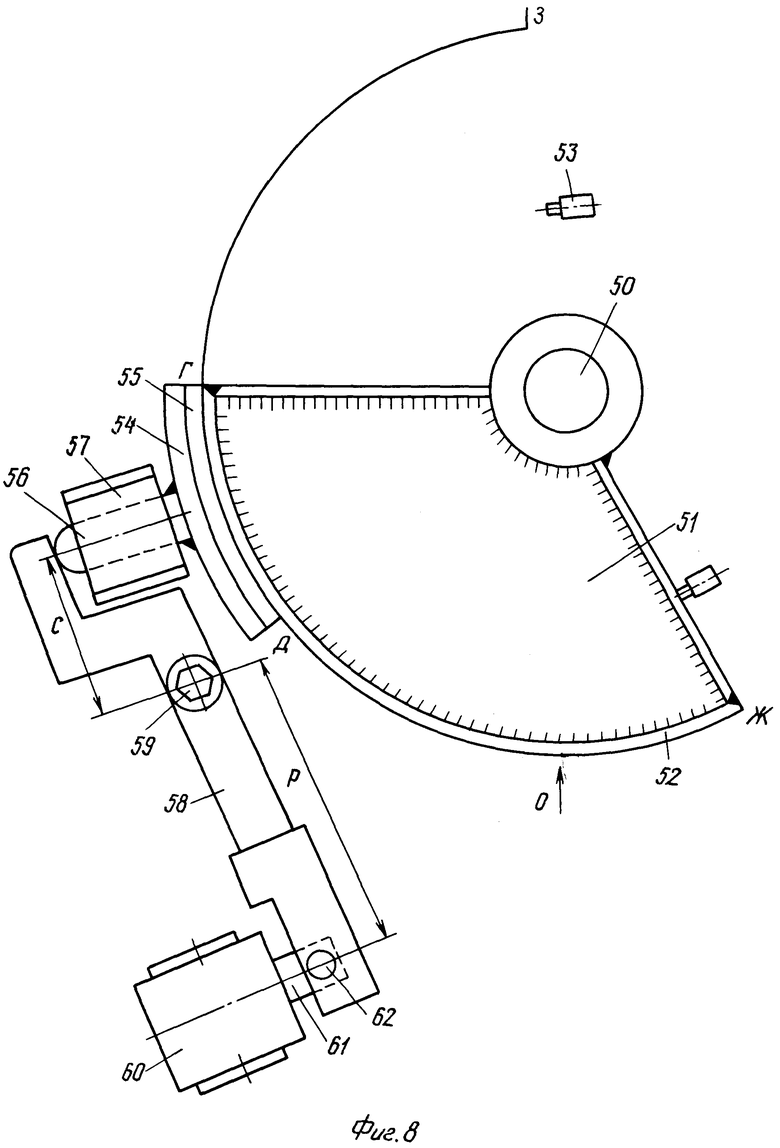
На фиг.8 схематично изображено тормозное устройство, обеспечивающее точную фиксацию угла возвышения при работе пусковой установки 1 (фиг.1), которое состоит из следующих основных сборочных единиц и деталей: на валу 50 механизма, обеспечивающего наведение по углу возвышения 6 (фиг.1) ракетной установки 1 (фиг.1), с помощью шпонки и штифта (на фиг. не показаны) установлен сварной тормозной сектор 51 с рабочей поверхностью 52, движение которого ограничивают концевые выключатели 53, к нему примыкает тормозная колодка 54 с накладкой 55 из упругого материала, например из вакуумной резины, стержень 56 которой расположен в корпусе 57, имеющем ограничительной устройство (на фиг. не показано) от поворота тормозной колодки относительно сектора 51, кроме того, тормозное устройство оснащено рычагом 58 с осью 59 его поворота, рычагами "Р" и "С" и соленоидом 60, сердечник 61 которого закреплен в рычаге 58 штифтом 62. Корпус 57 и соленоид 60 на соответствующих стойках (на фиг. не показаны) прикреплены к поворотному устройству 3 (фиг.1) ракетной установки.
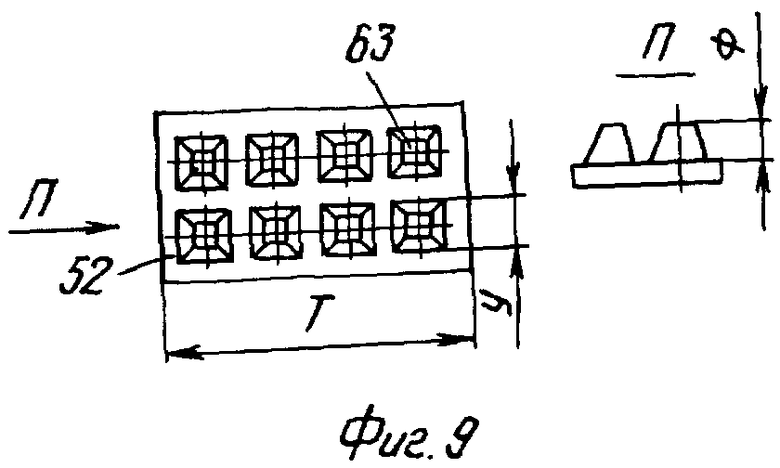
На фиг.9 показан снизу фрагмент рабочей поверхности 52 (фиг.8) с расположенными на ней рядами правильных усеченных четырехгранных тормозных пирамида 63 и вид "П" на них сбоку.
Расчеты основных частей тормозного устройства, осуществленные с целью обеспечения его надежной работы, определили ряд зависимостей размеров его конструктивных элементов:
- длина зоны перемещения тормозного сектора 51-"ГЗ" так относится к длине его рабочей поверхности 52-"ГЖ", как 2:3,
- отношение плеча рычага "Р" к длине его другого плеча "С", равно 1,625:1,
- длина рабочей части сектора 51-"ГЖ" так относится к длине рабочей части тормозной колодки 54- "ГД", как 3:1,
- длина рабочей части тормозной колодки 54-"ГД" так относится к ее ширине "Т", как 3,5:2,
- ширина "Т" рабочей части тормозной колодки 54 так относится к ширине или длине основания тормозных пирамид 63, как 6:1,
- отношение ширины или длины основания "У" тормозной пирамиды 63 к высоте "Ф" этой пирамиды равно 1:1.
Работа тормозного устройства механизма наведения по углу возвышения ракетной установки, изображенного на фиг.8 и фиг.9, осуществляется следующим образом:
- после установки тормозного сектора 51 на заданный угол возвышения срабатывает соленоид 60, втягивая сердечник 61, который свое усилие через штифт 62 передает рычагу 58, вращающемуся вокруг своей оси 59 и нажимающему на стержень 56 тормозной колодки 54, которая, в свою очередь, прижимает свою накладку 55 из упругого материала к правильным усеченным четырехгранным пирамидам 63, расположенным на рабочей части 52 тормозного сектора 51, и обеспечивает его надежное стопорение. Выключение тормозного устройства производится в обратном порядке.
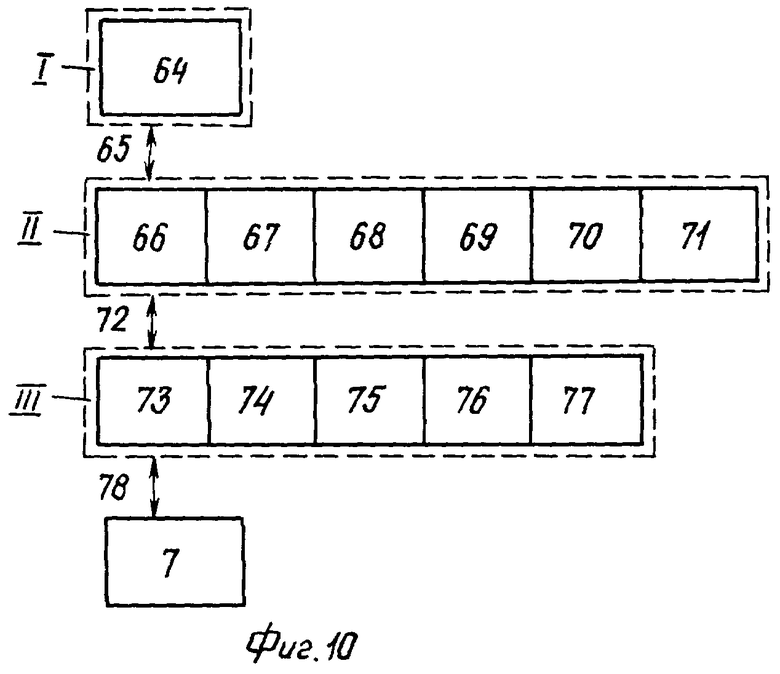
На фиг.10 изображена блок-схема из электронных блоков пусковой установки 1 (фиг.1), обеспечивающих вместе с пультом дистанционного управления 7 (фиг.1) ее работу в автоматическом, полуавтоматическом и ручном режимах.
С целью обеспечения удобства обслуживания, высокой надежности и безаварийности пусковой установки в процессе эксплуатации ее устройства и механизмы условно разделены на три яруса, электронные блоки расположенные на которых выполняют следующий конкретные функции:
- на ярусе 1 блок 64 поджига ПГИ для их запуска, провода от которого подключены к розеткам (на фиг. не показаны), расположенным на каждой паре направляющих сменных пакетов 5 (фиг.1),
- на ярусе 2 блок 66 управления двигателем привода наведения по возвышению 6 (фиг.1), блок 67 управления соленоидом 60 (фиг.8) тормоза этого привода, блок 68 проверки готовности установки 1 (фиг.1) к запуску ПГИ, блок 69 запуска ПГИ, блок 70 датчиков поворота по углам возвышения (на фиг. не показаны) и блок 71 концевых датчиков поворота по углу возвышения 53 (фиг.8),
- на ярусе 3 блок 73 управления двигателем привода наведения по углам азимута 6а (фиг.1), блок 74 датчиков угла поворота по азимуту (на фиг. не показаны), блок 75 концевых датчиков отключения двигателя привода наведения по углам азимута 6а (фиг.1), блок 76 аккумуляторов установки (на фиг. не показаны), блок 77 разъемов для соединения с пультом дистанционного управления 7 (фиг.1).
Блок яруса 1 соединяется с блоками яруса 2 кабелем 65, которым комплектуется каждый сменный пакет блоков направляющих ПГИ 5 (фиг.1), и для предотвращения его провиса в работе он проходит через точку оси вращения этого пакета по углу возвышения. Блоки ярусов 2 и 3 соединяются кабелем 72, проходящим сквозь полый вал привода поворота по углам азимута 6а (фиг.1). Все кабели выполнены двунаправленными токовыми петлями.
При возникновении в любом из электронных блоков каких-либо аварийных ситуаций в каждом из них происходит их обработка и блокировка с оповещением на пульт дистанционного управления 7 (фиг.1).
Работа блок-схемы, изображенной на фиг.10, осуществляется следующим образом: информации, поступающая из центра управления пусковыми установками 9 (фиг.1), передается на пульт дистанционного управления 7 (фиг.1), процессор которого, в свою очередь, передает команды на все электронные блоки пусковой установки, после чего и происходит ее наведение и пуск ПГИ.
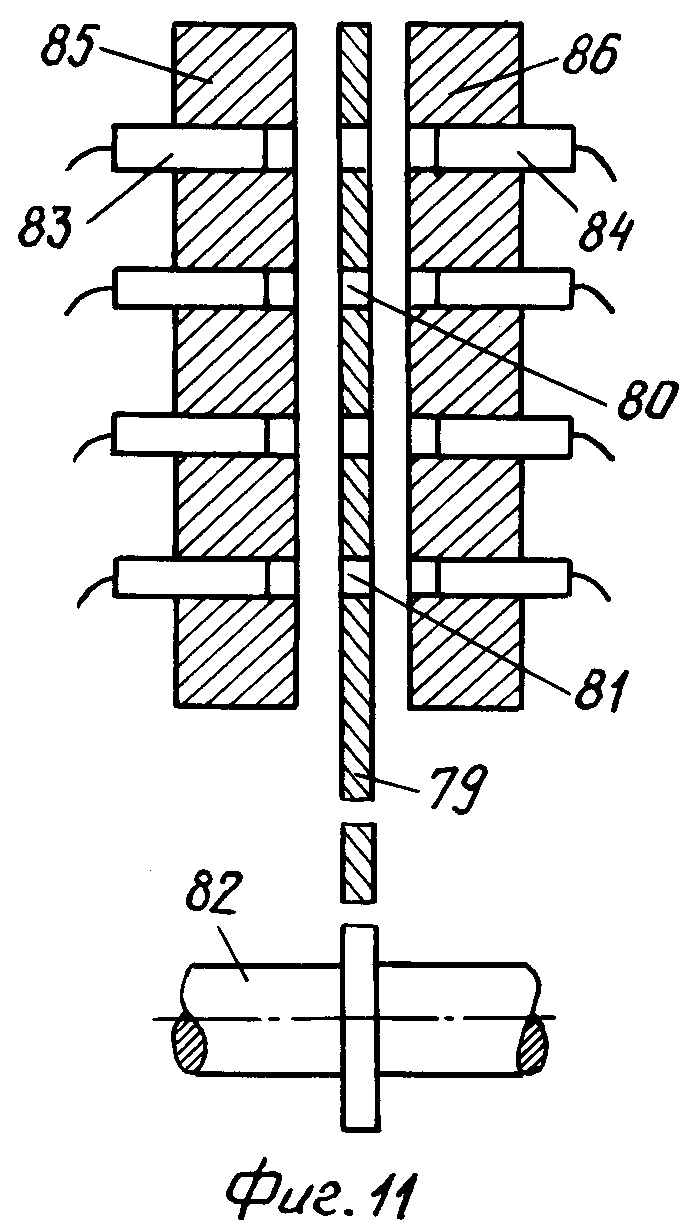
На фиг.11 изображено принципиальное устройство оптических датчиков системы ориентации установки для запуска ПГИ по азимуту и углам возвышения, которое состоит из диска 79 (у датчика для ориентации по азимуту) с отверстиями 80, расположенными на трех концентрических окружностях, эквидистантным окружности периферии этого диска, и с отверстием 81 точки отсчета, расположенном на четвертой такой же окружности, сам же диск 79 жестко закреплен на валу 82 редуктора механизма ориентации установки по азимуту (на фиг. не показан), что обеспечивает при работе его нулевой люфт; для ориентации по углам возвышения на валу соответствующего механизма (на фиг. не показаны) вместо диска 79 установлен сектор, который является частью точно такого же диска, но с другим углом расположения точки отсчета.
Работа датчиков происходит следующим образом: диск 79 (или сектор), вращаясь вместе с валом 82, перемещает отверстия 80 и 81 через зону жестко закрепленных на корпусных деталях установки держателей 85 светодиодов 83 и держателей 86 фотодиодов 84, и при этом лучи светодкодов 83, проходя сквозь соответствующие отверстия 80 и 81, попадают на фотодиоды 84 и таким образом передают необходимую информацию о работе системы ориентации.
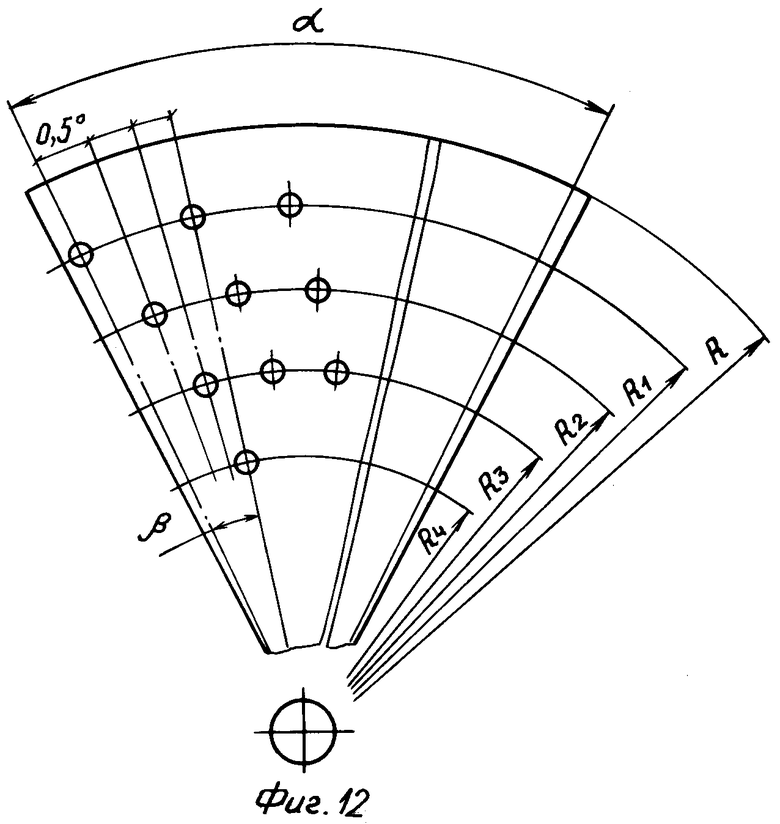
На фиг.12 изображен фрагмент сектора датчика ориентации по углам возвышения, по которому видно, что углы между отверстиями, расположенными на дугах с радиусами R1 , R2 и R3, равны 1°30', а отверстия, расположенные на верхних трех дугах, смещены относительно друг друга на угол 30', что и соответствует точности наведения установки.
Сектору к диску соответствуют следующие соотношения: α:β как 1,611:1 (для диска это отношение равно 8:1), a R:R1:R2:R3:R4 равно 1:1,027:1,035:1,037:1,038.
Изготовление и межведомственные испытания опытного образца комплекса полностью подтвердили достижения цели, поставленной в настоящем изобретении.
Источники информации
1. Комплект рабочих чертежей Тульского КБ стрелкового оружия.
2. Описание ракетной установки ОАО Мотовиленские заводы, г. Пермь [ПРОТОТИП].
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ ПРОТИВОГРАДОВАЯ РАКЕТНАЯ ПУСКОВАЯ УСТАНОВКА | 2008 |
|
RU2370943C1 |
| РАКЕТНАЯ ПУСКОВАЯ УСТАНОВКА | 2005 |
|
RU2299556C1 |
| РАКЕТНАЯ ПУСКОВАЯ УСТАНОВКА | 2021 |
|
RU2766029C1 |
| Автоматизированная противоградовая ракетная пусковая установка | 2020 |
|
RU2738319C1 |
| РАКЕТНАЯ ПУСКОВАЯ УСТАНОВКА | 2007 |
|
RU2346225C1 |
| РАКЕТНАЯ ПУСКОВАЯ УСТАНОВКА | 2012 |
|
RU2529043C2 |
| ПУСКОВАЯ УСТАНОВКА ДЛЯ ЗАПУСКА МАЛОГАБАРИТНЫХ РАКЕТ | 2004 |
|
RU2265179C1 |
| СТОПОРНОЕ УСТРОЙСТВО РАКЕТНОЙ ПУСКОВОЙ УСТАНОВКИ | 2005 |
|
RU2300071C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПРОТИВОГРАДОВОЙ ЗАЩИТЫ | 1994 |
|
RU2083999C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ САМОХОДНОГО ЗЕНИТНОГО КОМПЛЕКСА | 1995 |
|
RU2102686C1 |

Изобретение относится к области метеорологии, а именно к средствам активного воздействия специальными противоградовыми изделиями на различные виды облаков. Пусковая установка выполнена универсальной со сменными пакетами многоярусных направляющих для противоградовых изделий различных калибров и типов и со стопорными устройствами для противоградовых изделий, удерживающими их в пусковой установке до начала старта. Сами пакеты унифицированы по габаритам, креплению к платформе для их размещения. Каждый сменный многоярусный пакет направляющих выполнен для конкретного калибра и типа противоградовых изделий как реактивного, так и динамического их старта, соединенных между собой, из одинаковых блоков направляющих, с их количеством в пакетах, кратным 4, 5, 6 и 7, и с такой же кратностью размещаемых в них противоградовых изделий. Такое выполнение обеспечивает упрощение конструкции и технологичности комплекса при одновременном повышении надежности и долговечности в эксплуатации. 8 з.п. ф-лы, 12 ил.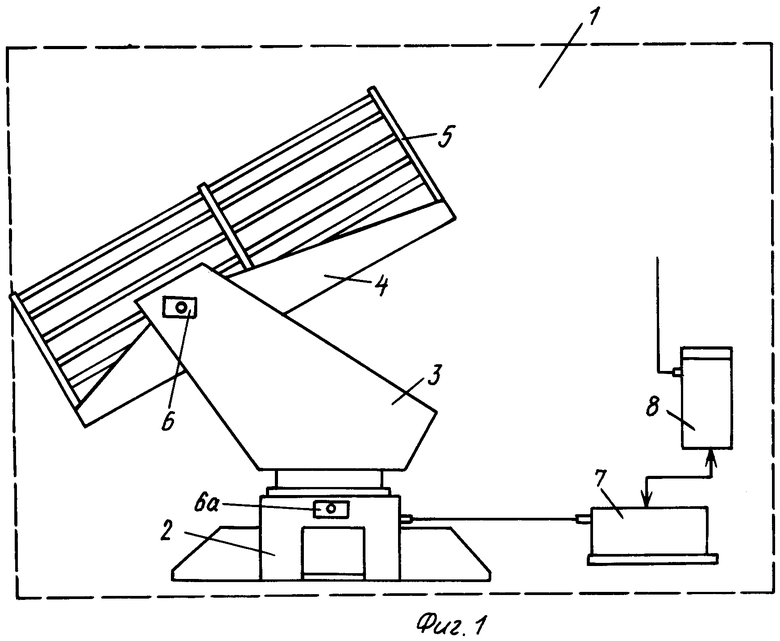
длина зоны перемещения тормозного сектора так относится к длине его рабочей части, как 2:3,
отношение длины большего плеча рычага к его меньшему плечу, как 1,625:1,
длина рабочей части тормозного сектора так относится к длине рабочей части колодки, как 3:1,
длина рабочей части тормозной колодки так относится к ее ширине, как 3,5:1,
ширина рабочей части тормозной колодки так относится к ширине или длине основания любой тормозной пирамиды, как 6:1, а отношение ширины или длины основания тормозной пирамиды к ее высоте равно 1:1.
| ПРОТИВОГРАДОВЫЙ РАКЕТНЫЙ КОМПЛЕКС | 1995 |
|
RU2075921C1 |
| Противоградовый ракетный комплекс | 1990 |
|
SU1748736A1 |
| ТРАНСПОРТНО-ПУСКОВОЙ КОНТЕЙНЕР ДЛЯ РАКЕТ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2000 |
|
RU2166166C1 |

